最適な出力のために、Google Chrome(15以降)または Microsoft Edge(79以降)を推奨いたします。
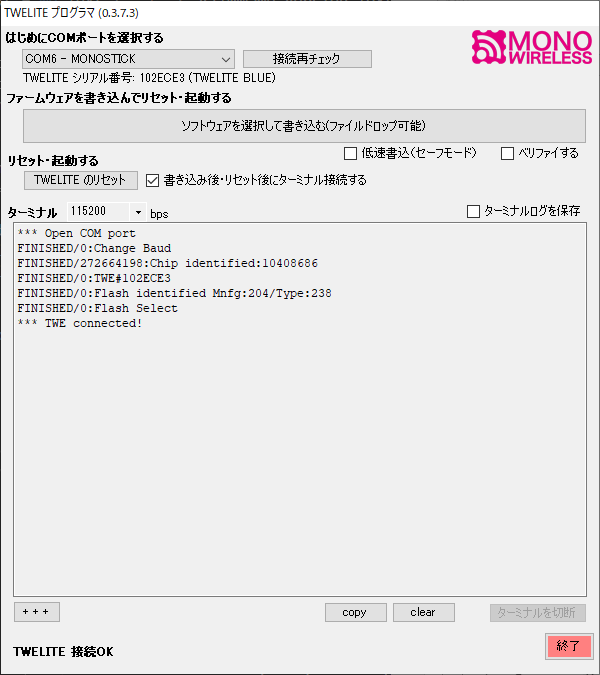
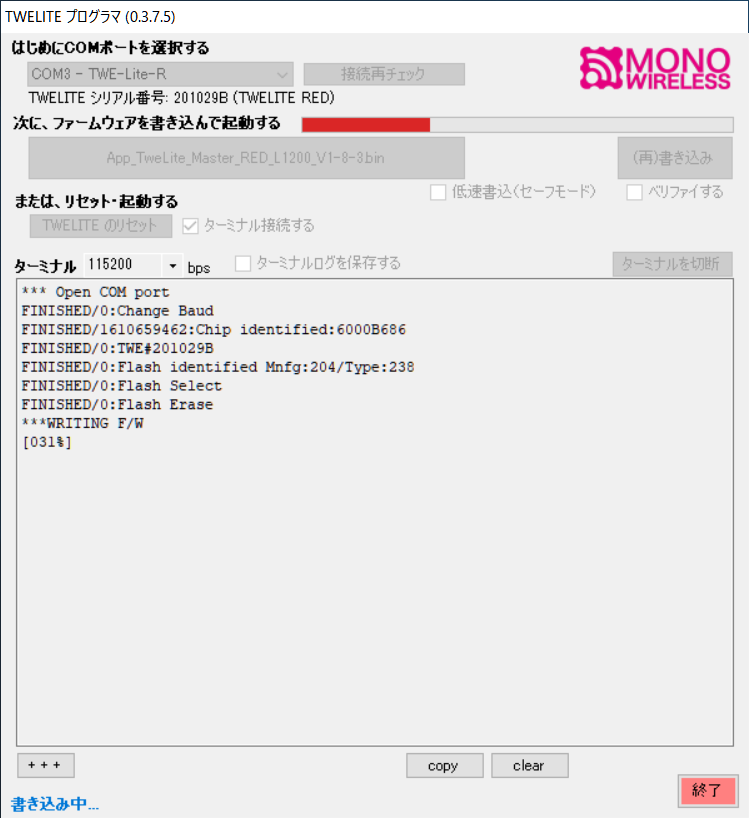
2026-04-20 現在 マニュアル ここでは、製品使用における詳細情報を掲載しています。
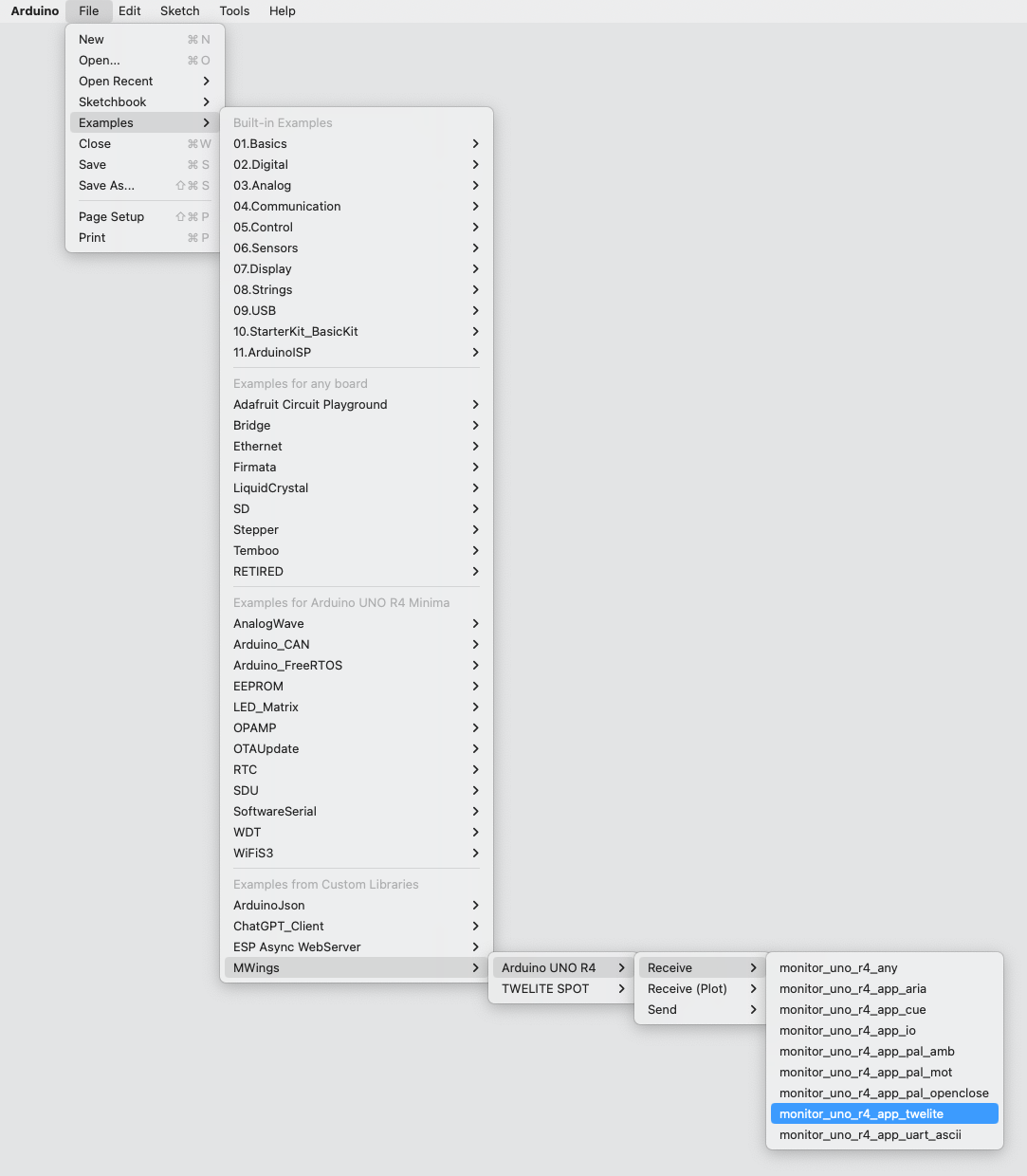
TWELITE シリーズ向けファームウェア(TWELITE APPS)の資料はこちら
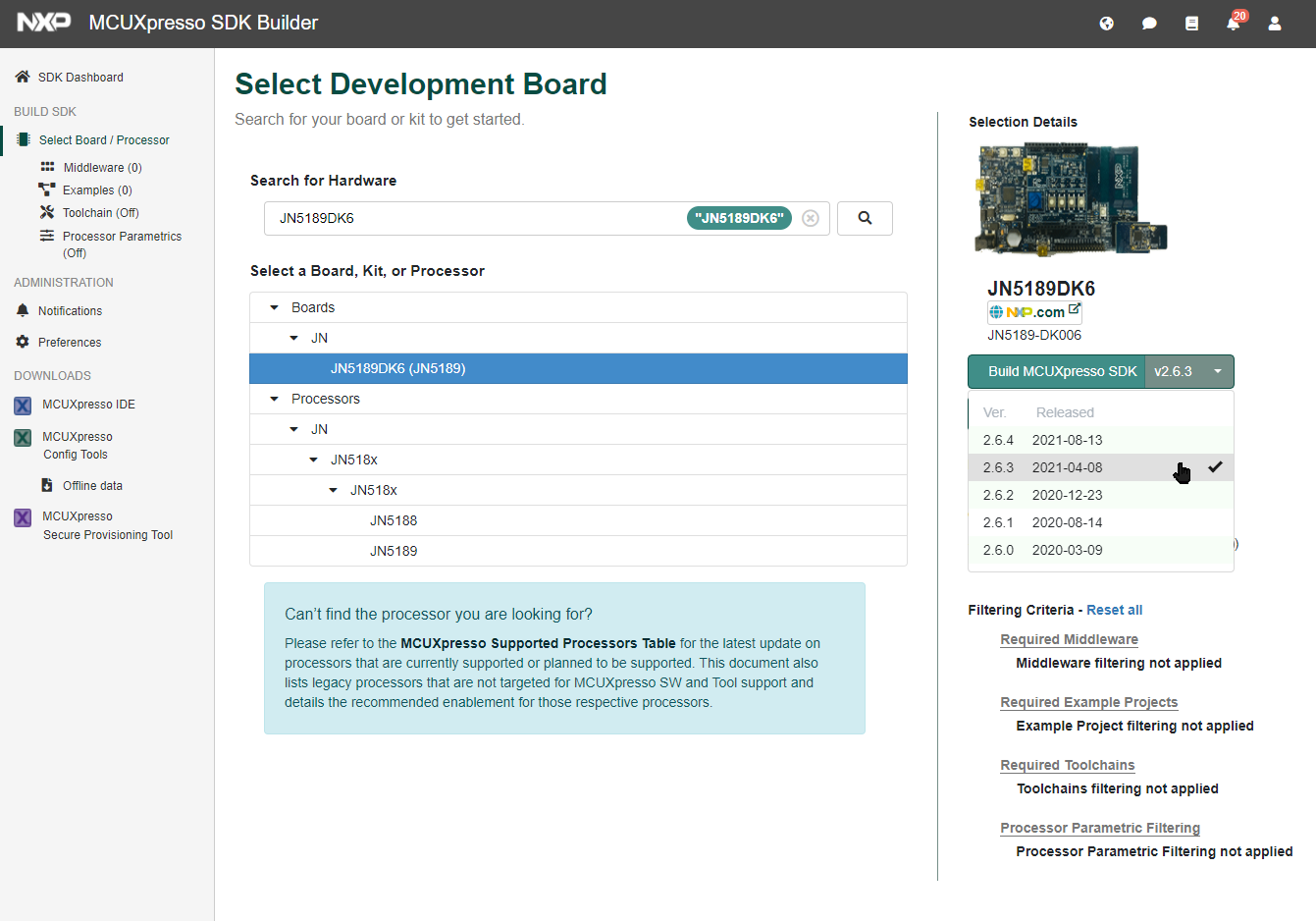
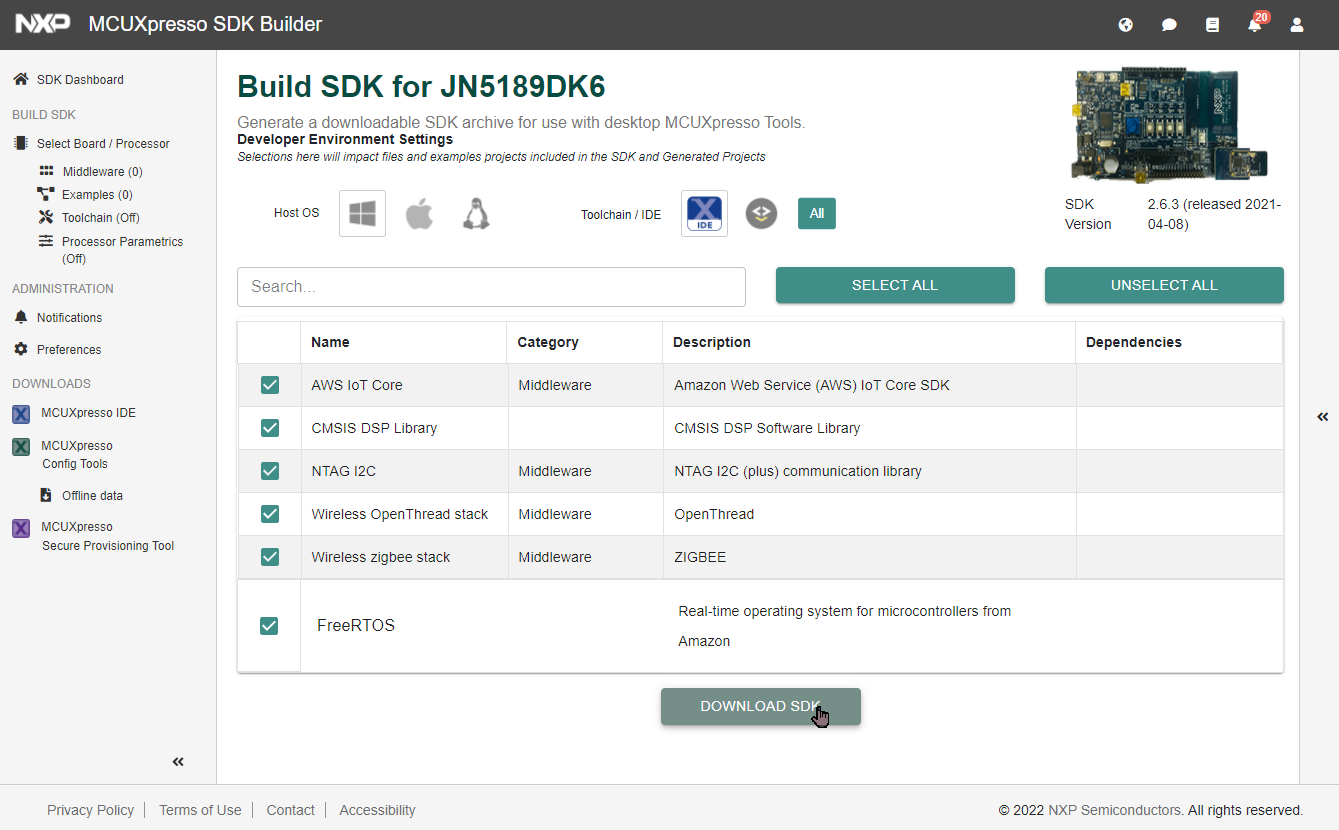
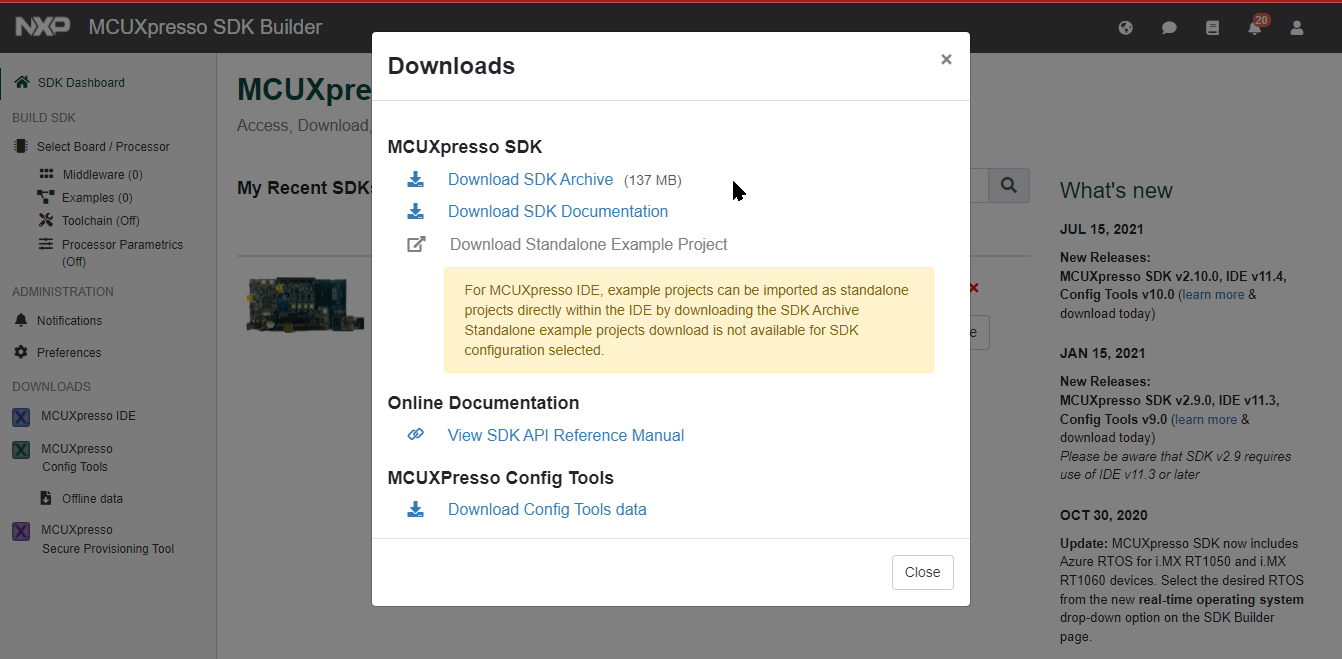
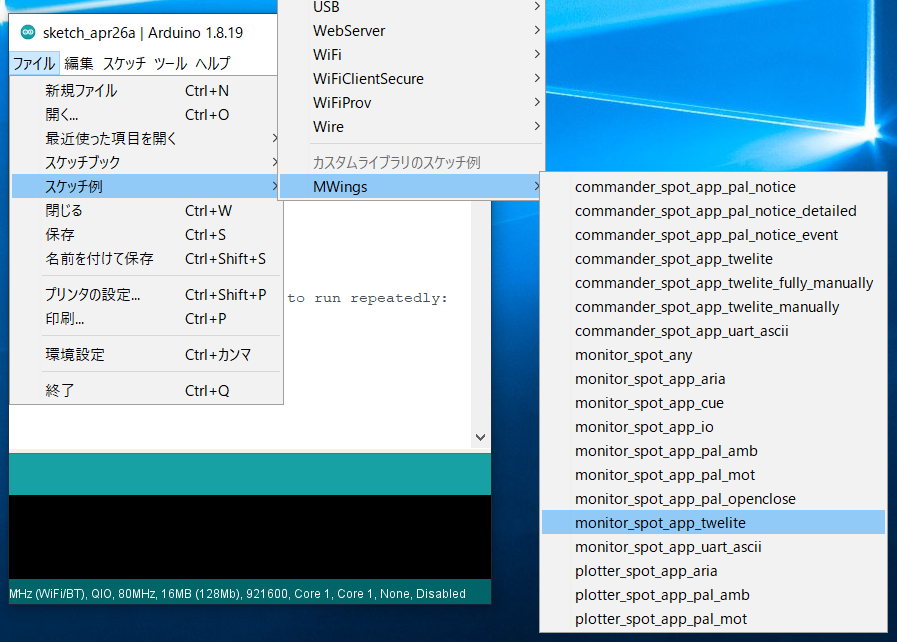
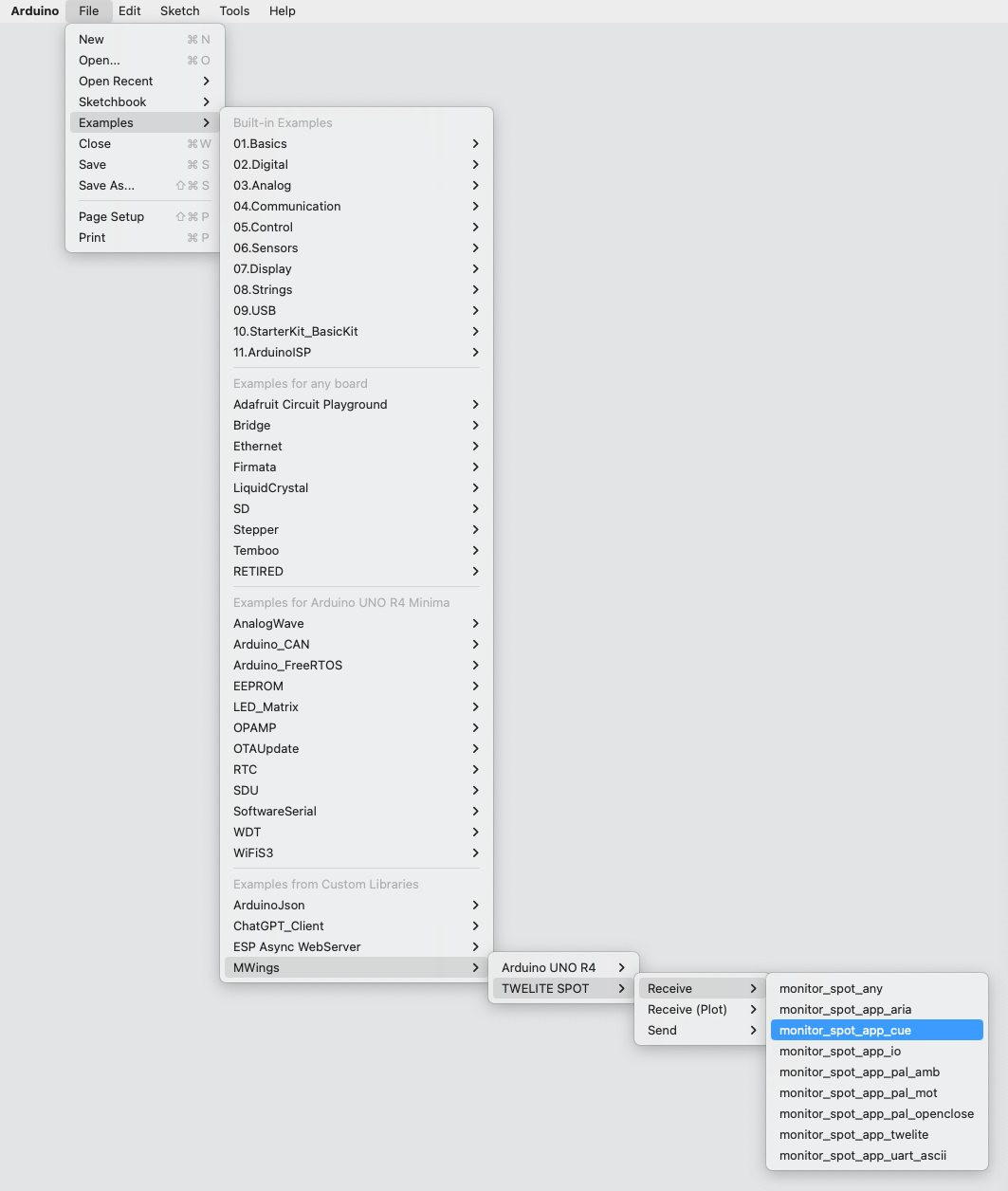
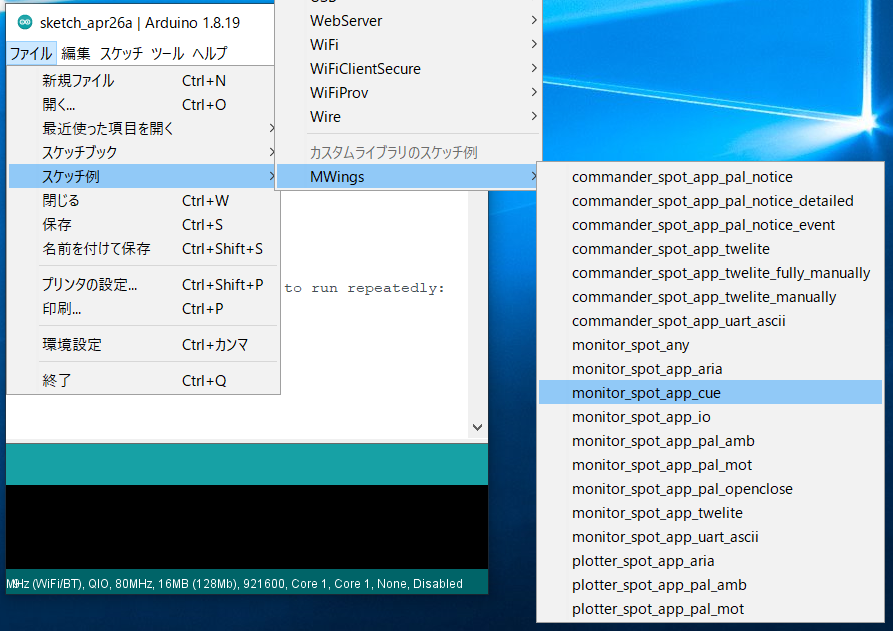
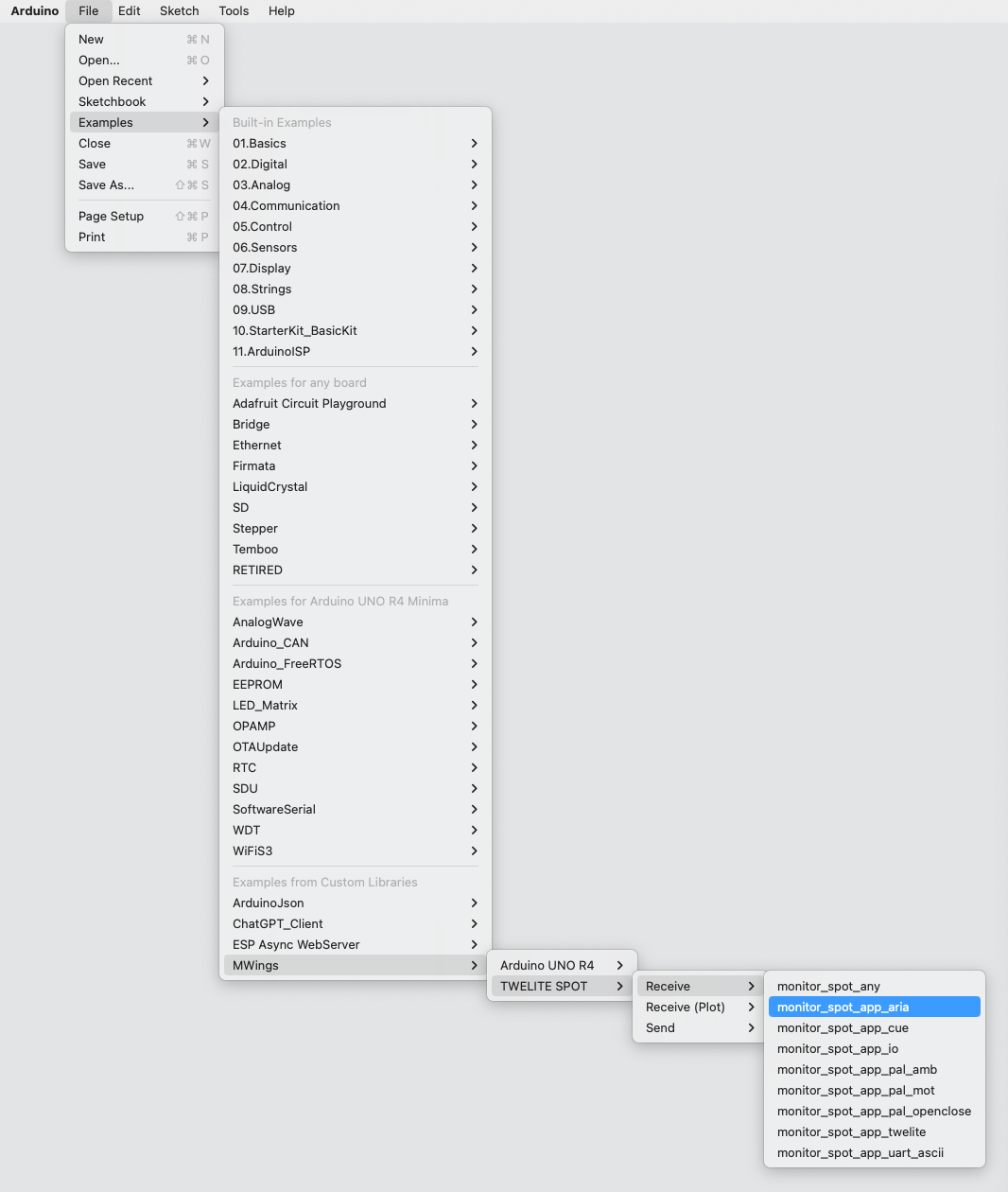
1 - TWELITE STAGE SDK TWELITE の設定やデータ表示、ファームウェア開発を行うためのパッケージ
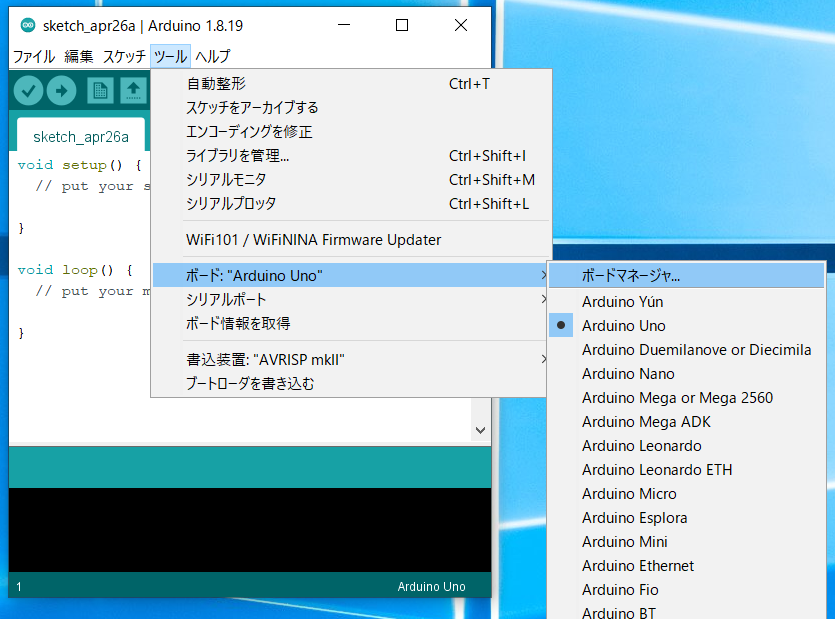
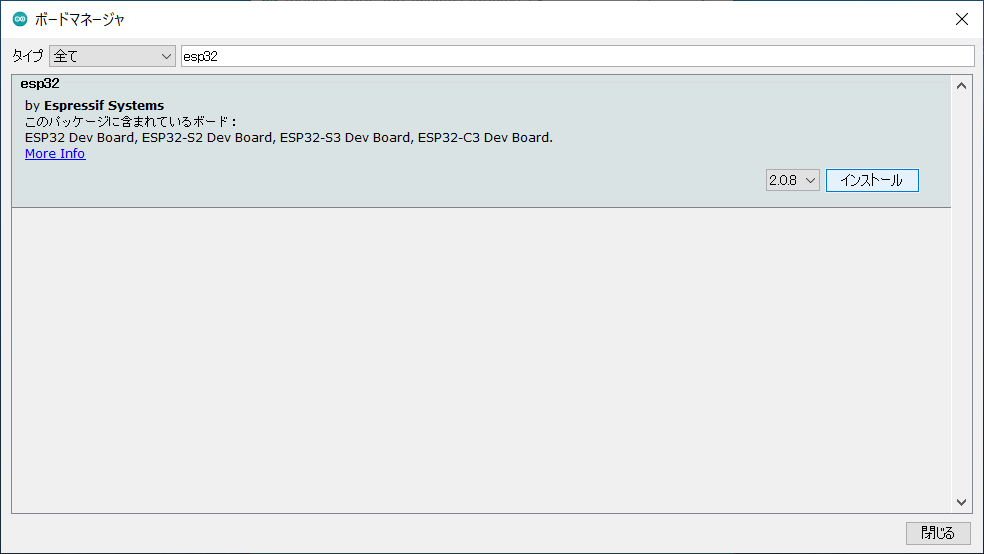
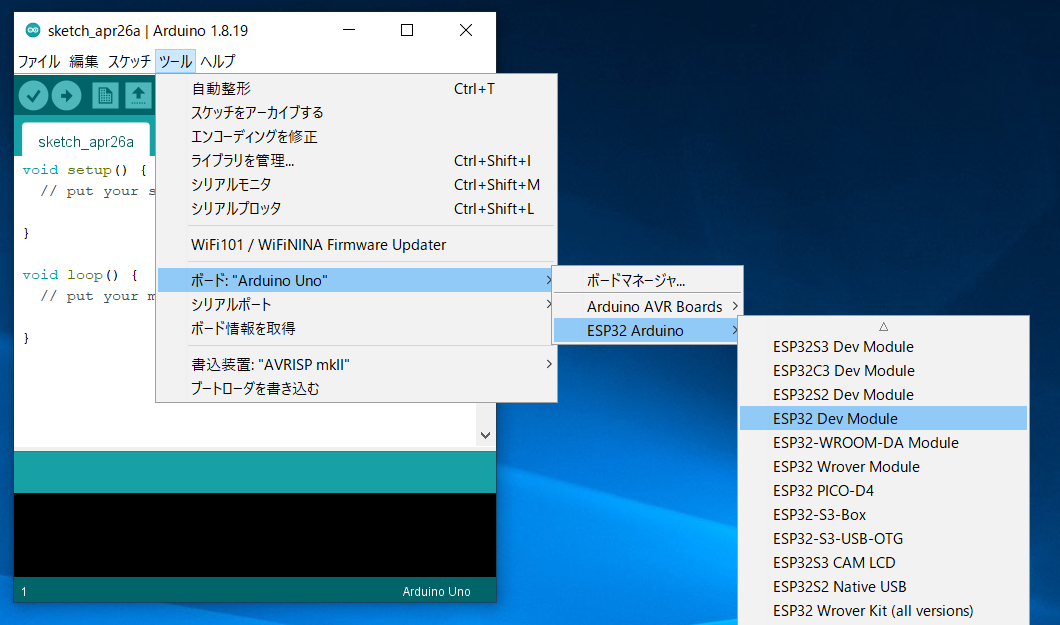
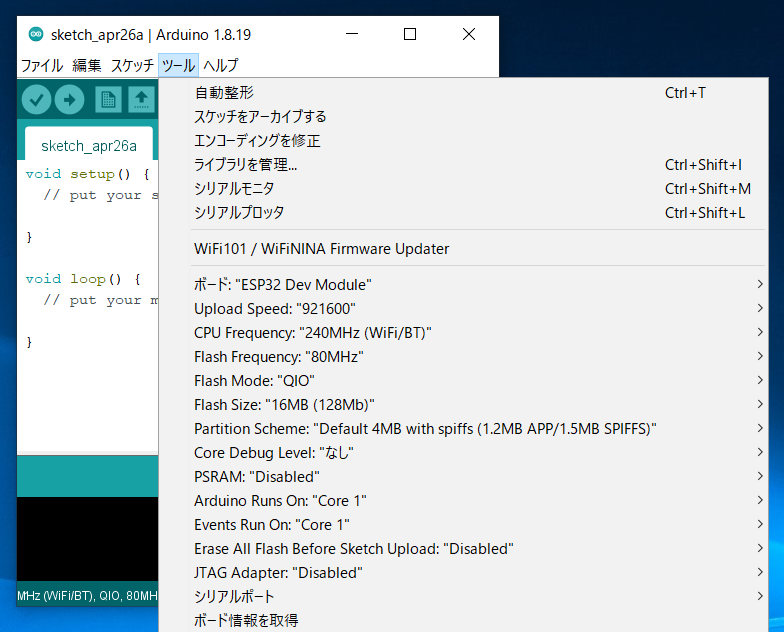
1.1 - 導入方法 TWELITE STAGE SDK のインストール方法
動作環境によっては、本アプリケーションの動作に各種設定が必要です。問題が生じた場合には、本資料の記述を参考にして環境を整備してください。
開発環境を構築するためには、ソフトウェア群のインストール、またこれらの利用許諾に同意する必要があります。また、セキュリティ設定等が必要になる場合があります。
配布時に十分注意しておりますが、お客さまの側でもウィルスやマルウェアが含まれていないことを確認いただくようお願いします。 セキュリティの運用(外部アプリケーションのインストールの可否など)については、お客さまの環境の管理者にご確認ください。 「アプリケーションの配布と実行について」 も併せてご覧ください。以下の内容を含みます。
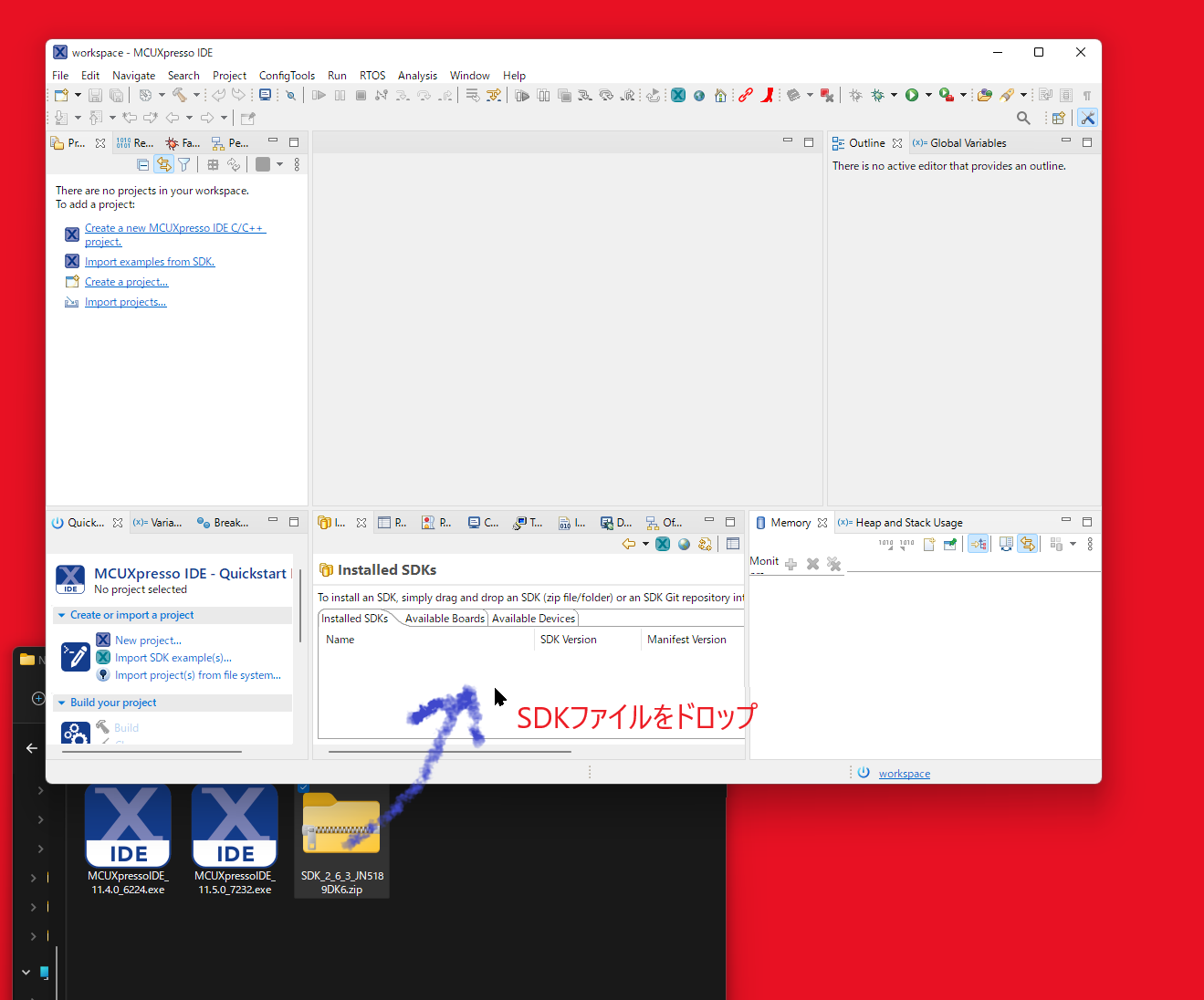
本来のファイルとダウンロードしたファイルの同一性の確認について macOS/Windowsにおけるコード署名の取り扱いについて TWELITE STAGE SDK のインストール手順 ① アーカイブを取得 TWELITE STAGE SDK をダウンロード します。
② アーカイブを展開 ダウンロードしたZipアーカイブを展開します。
展開先のファイルパスには、半角数字 0..9、半角アルファベットa..zA..Z、一部の記号 -_. 以外の空白や漢字・ひらがな等を含めないでください。
Windows の場合の例
NG : C:\work\作業\ NG : C:\Users\user1\work dir\ OK : C:\Work\Work1 ③ ファイルを確認 展開先のフォルダを確認します。
通常 C:\Work 上に配置したアーカイブは C:\Work\MWSTAGE に展開されますが、展開ソフトによってはフォルダ名が異なる可能性があります。 必要に応じて変更してください。
文中では展開したフォルダ (例 C:\Work\MWSTAGE ) を {MWSTAGE インストール} のように表記する場合があります。
展開先のフォルダ {MWSTAGE インストール} には、以下が含まれます。
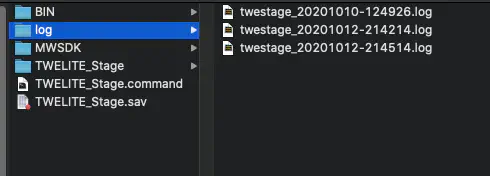
TWELITE STAGE APPWindows の場合:TWELITE_Stage.exe(通常版)、TWELITE_Stage_VSCode.exe(VSCode対応版) macOS の場合:TWELITE_Stage.command(通常版)、TWELITE_Stage_VSCode.command(VSCode対応版) Linux の場合:TWELITE_Stage.run(通常版)、TWELITE_Stage_VSCode.run(VSCode対応版) TWELITE_STAGE - TWELITE STAGE APP の関連ファイルMWSDK - ライブラリ、ソースコードなどTools - ビルドするためのツールチェインなどBIN - TWELITE STAGE APP の [BINから選択]メニューで参照されるTWELITE 向け.BINファイルlog - TWELITE STAGE APP のログ機能やデータベースファイルの保存先flask_wsns_db - Python, Flask, sqlite3 による簡易的なサーバ詳細は「フォルダ構成 」をご覧ください。
1.1.1 - フォルダ構成 TWELITE STAGE APP のフォルダ構成について
TWELITE STAGE APP は、TWELITE STAGE SDK のフロントエンドアプリケーションとして動作します。
ここでは、そのフォルダ構成について解説します。
MWSTAGE/ : TWELITE STAGE SDK インストール
TWELITE_Stage.??? : 実行形式 (Windwows .exe, macOS .command, Linux .run)
TWELITE_Stage.sav : 設定ファイル
TWELITE_Stage.ini : その他設定
TWELITE_Stage/ : TWELITE STAGE APP の関連ファイル
MWSDK/ : MWSDKのライブラリなど
BIN/ : [BINファイル選択]時の格納先
log/ : ログ・データベース格納先
Tools/ : gcc コンパイラなどのツール一式
flask_wsns_db/ : Python, Flask, sqlite3 による簡易的なサーバ
MWSDK フォルダ
MWSDK/
Act_samples/ : mwx ライブラリによるサンプルコード
Wks_TweApps/ : TWELITE APPS のソースコード
Act_extras/ : mwx ライブラリによるより専門的なサンプル、他のライブラリを引用したもの
TWENET/ : TWENET ライブラリ (mwx ライブラリなど)
ChipLib/ : 半導体ライブラリ
MkFiles/ : Makefile の本体処理部分
docs/ : ライブラリマニュアルなど
LICENSE : MWSDKのライセンス記述
000manifest : MWSDKのバージョン情報
ReleaseNotes.md : 更新履歴(トップページ)
ReleaseNotes_en.md : 更新履歴(英語)
ReleaseNotes_jp.md : 更新履歴(日本語)
MWSDK フォルダには、TWELITE のソフトウェアを構築するためのライブラリや、サンプル、TWELITE APPS のソースコードが含まれます。
TWELITE_Stage.savTWELITE STAGE APPの設定情報を記録します。
ファイル名は TWELITE STAGE APP 実行形式名 + .sav です。
TWELITE_Stage.ini.iniファイルの詳細はこちら 。
MWSDK= MWSDK/ フォルダの替わりに別のフォルダを指定したいときに編集します。複数のライブラリバージョンを混在させる場合に便利です。上記の例では MWSDK2020_10 フォルダを利用します。LANG= TWELITE STAGE APP の表示言語を英語にする場合は LANG=en を指定します。設定の異なる TWELITE STAGE APP を実行する TWELITE_Stage.exe (Windows の場合) を別のファイル名でコピーします。 例えば TWS1.exe と変更した場合は、TRS1.sav, TRS1.ini という設定ファイルを参照します。
BIN フォルダTWELITE STAGE APP の [BINから選択] メニューを選択したときには、このフォルダにある ファームウェアファイル (.BIN) を利用します。
log フォルダTWELITE STAGE APP でシリアルポートのログ機能を実行したときには、このフォルダにログファイルを格納します。
グラフ機能を用いた場合のデータベースファイルの格納先や、csvファイルの出力先もこのフォルダです。
gcc, g++ など、クロスコンパイラの toolchain 等が含まれます。
プラットフォームに固有のユーティリティもこのフォルダに格納されます。詳しくは Tools/readme.txt を参照してください。
flask_wsns_db フォルダTWELITE STAGE APP のセンサーグラフビューアで作成したデータベースにアクセスするためのPythonのサンプルスクリプトです。
本サンプルでは表やグラフでデータをWebブラウザで閲覧することができます。
詳しくは flask_wsns_db/README.html を参照してください。
ビルドプロジェクトフォルダ
本機能は標準的に提供する機能ではないものとして紹介します。記載の内容と異なった動作になる場合もあります。
フォルダの検索順 TWELITE STAGE APP は、以下の順でビルドプロジェクトフォルダ (Act_samples など) を検索します。
TWELITE STAGE APP が起動したときのフォルダ TWELITE STAGE APP の実行形式があるフォルダ {MWSDKフォルダ}/..{MWSDKフォルダ}
MWSDK は TWELITE STAGE APP の実行形式があるフォルダを起点に検索します。
Wks_Acts Wks_Acts フォルダを作成した場合には、Act_samples フォルダの替わりに、このフォルダをメニューの[actビルド&書換]メニューから参照します。
Wks_Acts は、自身で作成したプロジェクトを格納する用途を想定しています。
1.1.2 - プラットフォーム別の注意事項 インストールにおけるプラットフォーム別の注意事項
TWELITE STAGE APP を各プラットフォームにインストールする際の注意事項を記載しています。
1.1.2.1 - Windowsへインストールする際の注意事項 TWELITE STAGE APP を Windows へインストールする際の注意事項
Windows 環境 以下の環境で開発・動作確認しています。
Windows10 バージョン 1903 VisualStudio 2019 (32bit ビルド) シリアルポートの取り扱い MONOSTICK や TWELITE R シリーズには、 FTDI社の USBシリアル変換IC(FT230/FT232 シリーズ)を搭載しています。これらを利用するために、デバイスドライバのインストールが必要となる場合があります。
PC がMONOSTICK や TWELITE R を認識しない場合には、 https://www.ftdichip.com より D2XX ドライバをインストールしてください。
Visual C++ ランタイムライブラリの追加インストール 場合によっては、Visual Studio 2019 の Visual C++ 頒布可能コード(ランタイムライブラリ)が必要です。
アプリケーションの起動時にエラーが出て起動しない場合は、本パッケージで再配布している TWELITE_Stage¥INSTALL¥VC_redist.x86.exe を実行するか、マイクロソフト社のウェブサイトから入手してください。なお、再配布バイナリは 32bit です。
1.1.2.2 - macOSインストールする際の注意事項 TWELITE STAGE APP を macOS へインストールする際の注意事項
macOS 環境 以下の環境で開発・動作確認しています。
macOS 10.14 (Mojave, Intel) macOS 12 (Monterey, Apple Silicon) Rosetta 2 の導入 BLUE / RED シリーズ向けのビルドには Rosetta 2 が必要です。
/usr/sbin/softwareupdate --install-rosetta --agree-to-license
BLUE / RED シリーズ向けのビルドには ba-elf-gcc などのツールチェーンを利用しますが、Apple Silicon 向けのバイナリは存在しません。
したがって、BLUE / RED シリーズのビルドを行う場合は macOS 27 以前をご利用ください 。
依存するソフトウェアや警告ダイアログについて 下記の事象が発生した場合には、 TWELITE_Stage.command の動作のために、実行の許可やインストールが必要です。
ツールチェインにはコード署名がなされていますが、コード署名が正しく認証されない場合は、ビルドツールチェイン (ba-elf-gcc など) の実行形式一つずつについて、動作許可を求められる場合があります。 ダウンロードアーカイブには署名しておりません。実行時には、インターネットからダウンロードされたアプリケーションとしてセキュリティ警告が出る場合があります。 TWELITE_Stage.command をインストールしたパスからの実行許可を要求される場合があります。ビルド実行時に make ユーティリティのインストールダイアログが出る場合があります。 make ユーティリティの追加インストール 場合によっては、make ユーティリティをインストールしなくてはなりません。
macOSバージョンの違いなどにより、別の手順で行う必要があるかもしれません。
コマンドライン (zsh) から make を実行したときに、エラーが出る場合には Command Line Tools をインストールします。
インストールが完了したら、make を入力して以下のメッセージの出力を確認します。
make
make: *** No targets specified and no makefile found. Stop. シリアルポートの取り扱い MONOSTICK や TWELITE R シリーズには、 FTDI社 (https://www.ftdichip.com ) の USBシリアル変換IC(FT230/FT232 シリーズ)を搭載しています。これらを利用するために、デバイスドライバのインストールが必要となる場合があります。
TWELITE_Stage.command を起動してもシリアルポートが表示されない場合は、FTDI社のドライバをアンロード(無効化)してください。
このユーティリティは MONOSTICK や TWELITE R を挿入した際にOS標準のデバイスドライバのロードを抑制するだけでなく、同じ USB の ID を持つそれ以外のデバイスについてもデバイスドライバのロードを抑制します。
https://www.ftdichip.com/Drivers/D2XX.htm より D2xxHelper をダウンロードできます。 なお、TWELITE STAGE SDKの TWELITE_Stage/INSTALL フォルダにも同じものを収録しています。
参考:FTDI社デバイスドライバの手動アンロード FTDI 関連のドライバをアンロードするには、以下のコマンドを実行します。
sudo kextunload -b com.apple.driver.AppleUSBFTDI 1.1.2.3 - Linuxへインストールする際の注意事項 TWELITE STAGE APP を Linux へインストールする際の注意事項
Linux
TWELITE R2 のUSBデバイスIDが従来の0403:6001から0403:6015に変わっています。udevの設定追加が必要です。
Linux環境はディストリビューションやバージョンによって、用意されているパッケージの種類が異なります。個別にパッケージ等のインストールや設定が必要になる場合があります。
エラーメッセージ等を手がかりに一般の情報を参照いただくようお願いいたします。
環境 以下の環境で開発・動作確認しています。
Ubuntu 16.04, 18.04, 20.04 NNLinux Beta8 64bit CentOS 7 シリアルポートの取り扱い TWELITE STAGE から MONOSTICK や TWELITE-R を認識するには、ftdi_sioモジュールをアンロードし、USBデバイスに対して読み書き権限を与える必要があります。
USBデバイスのIDを以下に示します。
ベンダーID 0x0403 プロダクトID 0x6001(MONOSTICK,TWELITE R) または 0x6015 (TWELITE R2) なお、この設定を自動化するための udev の設定スクリプト(Ubuntu, CentOS) を用意しています。
/etc/udev/rules.d に定義をコピーして、設定をリロードします。 設定後は USB デバイスを抜き差ししてから TWELITE_Stage.run を実行してください。起動直後の画面で USB デバイスが表示されたなら、設定が反映されています。
Ubuntu 16.04, 18.04, 20.04
cd ./MWSTAGE/TWELITE_Stage/INSTALL/ubuntu/
sudo ./set_udev_sudo.sh 定義ファイル(読みやすいように改行しています)
ACTION=="add",
ATTRS{idVendor}=="0403", ATTRS{idProduct}=="6001",
MODE="0666",
RUN+="/bin/sh -c 'rmmod ftdi_sio && rmmod usbserial'"
ACTION=="add",
ATTRS{idVendor}=="0403", ATTRS{idProduct}=="6015",
MODE="0666",
RUN+="/bin/sh -c 'rmmod ftdi_sio && rmmod usbserial'"
Centos 7
cd ./MWSTAGE/TWELITE_Stage/INSTALL/centos/
sudo ./set_udev_sudo.sh 定義ファイル(読みやすいように改行しています)
ACTION=="add",
ATTRS{idVendor}=="0403", ATTRS{idProduct}=="6001",
MODE="0666",
RUN+="/bin/sh -c '/usr/sbin/rmmod ftdi_sio'"
ACTION=="add",
ATTRS{idVendor}=="0403", ATTRS{idProduct}=="6015",
MODE="0666",
RUN+="/bin/sh -c '/usr/sbin/rmmod ftdi_sio'"
アプリケーションの登録 必要に応じて、お使いのデスクトップ環境に合った方法でアプリケーションを登録してください。
デスクトップ上のファイルアイコンから、TWELITE_Stage.run を実行できない場合があります。 これは、システムが TWELITE_Stage.run を実行形式として認識できない場合があるためです。
Ubuntu 16.04, 18.04, 20.04 Ubuntu用の定義ファイル生成スクリプトを用意しています。
cd ./MWSTAGE/TWELITE_Stage/INSTALL/ubuntu/
./make_launch_icon.sh このスクリプトは .desktop ファイル(アプリ定義)を $HOME/.local/share/applications に作成します。
スクリプト実行後に、アプリケーション一覧に TWELITE STAGE のアイコンが追加されます。
1.1.2.4 - Raspberry Piへインストールする際の注意事項 TWELITE STAGE APP を Raspberry Pi へインストールする際の注意事項
RasPi TWELITE STAGE APPは、一部を除く Raspberry Pi で動作します。
マウスとタッチスクリーンに対応します。 ビルドツールチェインが付属しており、コンパイルもできます。 実行形式には、X11版のほかにフレームバッファ版(nox)があるほか、半透明エフェクトなどを省略した軽量版があります。
お使いの Raspberry Pi の OS 種別、バージョン、インストール状況によっては動作しない場合や、再コンパイル等が必要になる場合があります。
環境 以下の環境で開発・動作確認しています。
ハードウェア Raspberry Pi 3 Model B LCD Screen: Raspberry Pi Touch Display (7") ソフトウェア Raspberry PI OS (32bit) Lite (Version:August 2020) 既知の問題・制限事項 1回目の起動で /dev/serial0 の動作に失敗することがあります。 Raspberry Pi 4B では /dev/serial0 の動作は未検証です。 Raspberry Pi 4B ではタッチスクリーンの動作は未検証です。 TWELITE STAGE への入力文字列が/dev/tty1上で動作してるシェルやgettyへ入力文字列がそのまま渡されます。/dev/tty1から起動することを推奨します。 他のインストールや動作のプログラム(X11など)に影響を受けることがあります。 アーカイブの展開 ダウンロードしたアーカイブファイルは、パス名に空白や日本語などが含まれないフォルダに展開します。
以下ではRaspberry Piのホームフォルダに展開しています。
cd /home/pi
unzip MWSTAGE2020_XX_YYYY.zip フォルダ構成
../MWSTAGE
TWELITE_Stage.run TWELITE_Stage アプリ
BIN/ ファームウェアBINファイル
MWSDK/ MWSDK ライブラリなど
TWELITE_Stage/ TWELITE_Stage アプリ関連ファイル
デバイスドライバ TWELITE STAGE から MONOSTICK や TWELITE R を認識するためには、ftdi_sioモジュールのアンロードや、USBデバイスに対する読み書き権限の付与が必要です。
USBデバイスのIDを以下に示します。
ベンダーID 0x0403 プロダクトID 0x6001(MONOSTICK,TWELITE R) または 0x6015 (TWELITE R2) この設定を自動化するための udev の設定スクリプトを用意しています。/etc/udev/rules.d に定義をコピーして、設定をリロードしています。設定後は USB デバイスを抜き差ししてから TWELITE_Stage.run を実行してください。起動直後の画面で USB デバイスが表示されたなら、設定が反映されています。
cd ./MWSTAGE/TWELITE_Stage/INSTALL/ubuntu/
sudo ./set_udev_sudo.sh 定義ファイル(読みやすいように改行しています)
ACTION=="add",
ATTRS{idVendor}=="0403", ATTRS{idProduct}=="6001",
MODE="0666",
RUN+="/bin/sh -c 'rmmod ftdi_sio && rmmod usbserial'"
ACTION=="add",
ATTRS{idVendor}=="0403", ATTRS{idProduct}=="6015",
MODE="0666",
RUN+="/bin/sh -c 'rmmod ftdi_sio && rmmod usbserial'"
シリアルポートの取り扱い 上述の環境では、raspi-config よりシリアルポートの設定をすることで /dev/serial0 が利用できます。
メニューより
"3 Interface Options Configure connections to peripherals"
→"P6 Serial Port Enable/disable shell messages on the serial connection"
以下のようにログインシェルとしては利用しない、ハードウェアを有効化するを選択します。
"Would you like a login shell to be accessible over serial?" ->
"Would you like the serial port hardware to be enabled?" →
配線例
[TWELITE] [Raspberry Pi]
GND ------------------ Gound (#6,#9,#14,#20,#25,#30,#34,#39のいずれか)
TXD(DIO6,DIP#10) ------ GPIO15/UART0 RXD (#10)
PRG(SPIMISO,DIP#7) ---- GPIO23 (#16)
RXD(DIO7,DIP#3) ------- GPIO14/UART0 TXD (#8)
RST(RESETN,DIP#21) ---- GPIO22 (#15)
VCC ------------------ 3V3 (#1,#17のいずれか)
SET(DIO12,DIP#15) ----- GPIO12 (#32)
TWELITE, Raspberry Pi それぞれのマニュアルを参照してください。 DIP# は TWELITE DIP のピン番号です。 上記の配線は TWELITEが安定稼働することを保証するものではありません。 TWELITE STAGE APPの起動 フレームバッファ版(nox)はX11のデスクトップ上では動作しません。X11を終了しておきます。 TWELITE_Stage.runを実行します。スクリーン画面上のTWELITE STAGE APPが表示されます。留意事項 マウスとタッチパネルに対応します。 TWELITE STAGE APP中で、入力した文字はコンソール画面にも表示される場合があります。 その他 /dev/dri エラーTWELITE_Stage.run の起動時に以下のエラーが出る場合がありますが、無視して構いません。
"The path /dev/dri/ cannot be opened or is not available"
メモリ不足 CPU数が4以上の場合、ビルド時はCPU数を一つ引いた値の並列コンパイルを実行します(4コアなら3並列)。 場合によってはメモリ不足が発生するかもしれません。その場合は並列数を変更してください。
Raspberry Pi 4
busterにおける注意事項 OpenGL関連のドライバを有効とする必要があります。
raspi-config の Advanced Settings → A2 GL Driver → G2 GL (Fake KMS) を選択します libgles-dev パッケージを導入しておきます Raspberry Pi OS (bookworm)
2024年6月現在、Raspberry Pi OS (32bit, bookworm)では、Linuxカーネルの更新に伴いピンの制御を行えず、モジュールを認識・操作できない不具合が発生しております。
また、bookworm では libccm 等に関するエラーにより起動できない不具合も確認されていますが、次のコマンドを実行することで解消できる場合があります。
sudo apt update
sudo apt install --reinstall libraspberrypi0 libraspberrypi-dev libraspberrypi-doc libraspberrypi-bin このとき、再起動すると lightdm の起動に失敗してしまう場合があります。
その際は raspberrypi-ui-mods の導入をお試しください。
sudo apt update
sudo apt install raspberrypi-ui-mods お手数ですが、当分は Raspberry Pi OS (32bit, bullseye) をご利用ください。
追記:Raspberry Pi OS (bookworm) に対応した TWELITE STAGE アプリのベータ版 を作成しました。
【32bit版パッチの導入方法】
cd MWSTAGE
wget https://dist.twelite.net/sdk/TWELITE_Stage_Wayland.run.zip
unzip TWELITE_Stage_Wayland.run.zip
./TWELITE_Stage_Wayland.run 【64bit版パッチの導入方法】
64bit版では、コンパイラも64bit版に差し替えます。
cd MWSTAGE
wget https://dist.twelite.net/sdk/TWELITE_Stage_Wayland_64.run.zip
unzip TWELITE_Stage_Wayland_64.run.zip
mv Tools/ba-elf-ba2-r36379 Tools/ba-elf-ba2-r36379-bkup32
wget https://dist.twelite.net/sdk/ba-elf-ba2-r36379_aarch64.tgz
tar -xzf ba-elf-ba2-r36379_aarch64.tgz
mv ba-elf-ba2-r36379 Tools/
./TWELITE_Stage_Wayland_64.run 1.2 - TWELITE STAGE APP ビルドや書き換え、設定やデータ表示を行うアプリケーション
TWELITE STAGE APP は、ファームウェアのビルドや書き換え、TWELITE APPSの設定やデータ表示を行うアプリケーションです。評価開発環境 TWELITE STAGE で使用します。
1.2.1 - TWELITE STAGE APP マニュアル ビルドや書き換え、設定やデータ表示を行うアプリケーション
TWELITE STAGE APP は、ファームウェアのビルドや書き換え、TWELITE APPSの設定やデータ表示を行うアプリケーションです。評価開発環境 TWELITE STAGE で使用します。
資料に関する注意事項 をご参照ください。
お気付きの点がありましたら、当サポート窓口にご連絡いただければ幸いです。
本資料の表示例(ボタン名や画面キャプチャ)は、資料作成時のバージョンのものとなっています。一部、入手されたバージョンと差異がある場合があります。
Windows/macOS/Linux ではコンパイラ・サンプルコードなどを格納した MWSDK が含まれます。これらに関する詳細は、以下を参照ください。
様々なプラットフォームで動作します。
Windows10 macOS (High Sierra 以降、Intel および Apple Silicon Mac に対応) Linux (Ubuntu18.04) Raspberry Pi (Raspberry Pi 3 Model B, Lcd Touch Screen, Raspberry Pi OS August-2020) (M5stack : バージョン1.0 まで対応。v1.3以降はソースレベルで非対応です。) ※ プラットフォームによって、動作条件や配布形式、また機能が異なります。
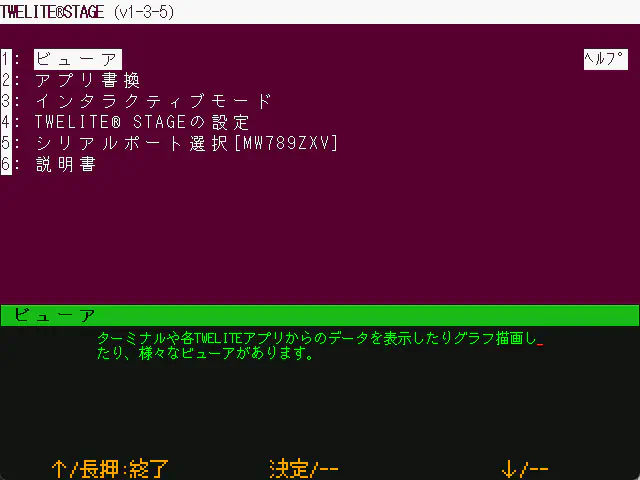
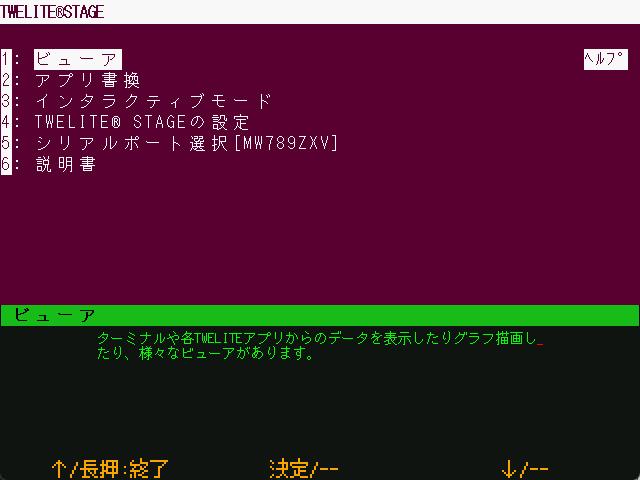
ルートメニュー
加速度リアルタイムグラフ
本資料について 対象のプラットフォームを示すため、一部のページでは以下を記載しています。Windows
– Windows 10macOS
– Mac OS X, OS X, macOSLinux
– Ubuntuなど(64bit)RasPi
– Raspberry Pi 1.2.1.1 - パッケージの取得 TWELITE STAGE APP の取得方法
最新版のTWELITE STAGE アプリは、以下のいずれかの方法で取得できます。
TWELITE STAGE SDK 全体(公式サイト) モノワイヤレス公式サイトでは、TWELITE STAGE アプリを含む開発ツール一式(Windows/macOS/Linux用)を配布しています。
TWELITE STAGE-トワイライトステージ - MONO-WIRELESS.COM
TWELITE STAGE アプリのみ(GitHub) モノワイヤレス公式リポジトリでは、TWELITE STAGE アプリ単体のバイナリを配布しています。 TWELITE STAGE アプリだけを更新する場合や、M5Stack版を取得する際にはこちらをご利用ください。 各バイナリのバージョンはGitHub上のtagから識別できます。
TWELITE STAGEアプリは、安定板として配布された最新のTWELITE STAGE SDKにおける動作を目的としています。 したがって、古いSDKでは、新しいTWELITE STAGEアプリが正常に動作しない恐れがあります。
Windows monowireless/TWELITE_Stage_BIN_Win: Binary Distribution of TWELITE Stage.
macOS monowireless/TWELITE_Stage_BIN_macOS: Binary distribution of TWELITE Stage for macOS
Linux Linux 版のバイナリは個別に配布しておりません。 バイナリは TWELITE STAGE SDK パッケージから取得してください。 もしくは、ソースコードからビルドしてください。
Raspberry Pi Raspberry Pi 版のバイナリは個別に配布しておりません。 バイナリは TWELITE STAGE SDK パッケージから取得してください。 もしくは、ソースコードからビルドしてください。
M5Stack バージョン 1.0.3a までを以下のページで配布しております。
monowireless/TWELITE_STAGE_Bin_M5Stack
ソースコード (MWM5ライブラリ) TWELITE STAGE のソースコードを含む MWM5 ライブラリは以下のページで公開しています。
monowireless/mwm5
TWELITE STAGE アプリのソースコードは、examples/TWELITE_Stageに配置しています。
1.2.1.2 - 使用方法 TWELITE STAGE APP の使用方法
TWELITE STAGE APP の画面・操作方法を解説します。
アプリの起動方法 TWELITE STAGE アプリを起動するには、{MWSTAGE インストール} にある実行形式を実行します。
アップデートなどでTWELITE STAGE アプリの実行形式を差し替える場合には、必ず、指定フォルダ {MWSTAGE インストール} にコピーしてください。 それ以外のパスに実行形式を配置した場合の動作は未定義です。
実行はプラットフォーム(Windows, macOS, Linux)によって方法が異なります。
システム 拡張子 備考 Windows .exeエクスプローラで実行形式をダブルクリック macOS .commandFinder で実行形式をダブルクリック Linux
RasPi .runディストリビューションやインストール環境に依存します。Xウインドウシステム上のターミナル画面(xtermなど)から、コマンドとして実行します
アプリの実行形式 TWELITE STAGE APP には、2種類の実行形式があります。
TWELITE_Stage.{拡張子} - 標準設定で起動します。 TWELITE_Stage_VSCode.{拡張子} - 「VSCode を使う」設定済みです(設定はTWELITE_Stage_VSCode.iniに保存)。VSCodeを使う設定を有効にすると、VSCodeを用いた開発作業に適した動作を行うようになります。
TWELITE STAGE APP は複数起動してもエラーになりませんが、複数起動すると不都合のある機能(センサーグラフ機能など)が存在します。
したがって、複数のアプリを同時に起動する際には、実行形式を複製して、別々のファイルを立ち上げる必要があります。 各種設定ファイルや入出力ファイルが分離されるため、互いの干渉を避けることができます。
アプリの実行画面 アプリを起動すると、以下の2種類のウィンドウが表示されます。
メイン画面TWELITE STAGE APPのユーザインタフェースを表示します。タイトルバーに接続(TWELITE-RやTWELITE STICKなど)中のシリアルポートが表示されます。 TWELITE STAGE APPの操作はこの中で行います。ALT(Cmd)キーを押すことで、操作補助画面を表示します。 画面下部には [ A ] [ B ] [ C ]のボタンが表示され、操作に利用します。このボタンは長押しすることで、副機能を呼び出すことができます。 コマンド画面通常は使用しませんが、補助情報を表示します。シリアル通信の内容が表示されるため、ログを確認する用途に最適です。 コマンドラインから実行した場合には、実行元のターミナルがコマンド画面となります。 TWELITE STAGE APP 画面例
アプリの終了 いずれかの方法で終了してください。
実行画面上の右上にマウスポインタを移動し、画面内に表示された終了ボタンを押します。 実行画面のウインドウを閉じます(macOSの場合は⌘Qも使用できます)。
ごくまれに、終了操作をしても実行画面が残る場合があります。その場合には、以下をお試しください。
TWELTIE STAGE APPのコマンドライン画面を閉じる。 強制終了を行う(強制終了の操作方法はお使いのシステムの解説を参照してください)。 1.2.1.2.1 - キーとマウスの操作 TWELITE STAGE APP に使用するキーとマウスの操作説明
Windows
macOS
Linux
RasPi
TWELITE STAGE APP に使用するキーとマウスの操作を解説します。
キー操作 Windows
macOS
Linux
RasPi
Alt(⌘)を押しながら行うキー入力は、TWELITE STAGE APP の設定を変える操作等に割り当てられています。その他のキー操作は、通常は文字入力として機能します。
共通のキー Windows
macOS
Linux
RasPi
キー 意味 ESC ESC素早く2回ESCを押す。キャンセル、または前画面に戻る。画面によっては1回の押下で前画面に戻ります。 ENTER入力、選択 BS一文字削除 カーソルキー↑ ↓ 項目の選択
ヘルプ画面 Windows
macOS
Linux
RasPi
Alt(⌘)を押し続けるAlt(⌘)と一緒に操作できるキーの説明や一部動作状況を表示します。
ヘルプ画面は画面の左上部分にマウスポインタを移動する ことでも表示できます。
ヘルプ画面
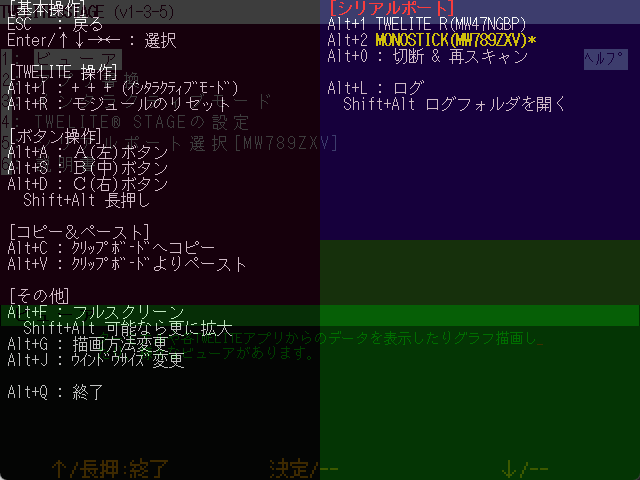
Alt(⌘)+操作 Windows
macOS
Linux
RasPi
Alt(⌘)を押しながら行う操作について解説します。
表中ではAlt(⌘)+の表記は省略しています。上記のヘルプ画面から使用可能なキーを確認できますが、下表に補足説明を示します。
Alt(⌘)+キー意味 I+ + + を入力します。インタラクティブモードに入るキーシーケンスです。※ スリープによる間欠動作を行うアプリは非対応。 Rモジュールをリセットします。TWELITE R や MONOSTICK の機能を用いてリセットピンの制御を行います。 A, S, DA, B, C ボタンを押します。 Shift+A, S, DA, B, C ボタンを長押しします。 C表示されている画面の文字列をクリップボードにコピーします。(画面によって範囲は異なります) Vクリップボードからキーボード入力としてペーストします。 Fフルスクリーン表示に遷移します。Shift+Fの場合、可能であればより拡大します。 G画面の描画方法を変更します。640x480の液晶画面をエミュレートしていますが、拡大時の描画方式として(1. 液晶モニタ風の描画 / 2. ブラウン管風の描画 / 3. ドットを目立たせた拡大 / 4. ドットをぼやかせた拡大)の4種類が選択できます。※ 設定メニューで起動時の設定を変更できます。 J画面サイズを選択します。選択可能な画面サイズは {640,480}, {1280, 720}, {1280,960}, {1920,1440}, {2560,1440}, {320,240} です。※ 設定メニューで起動時設定にできます。 QTWELITE STAGE APPを終了します。 0シリアルポートを切断し、再度シリアルポートの一覧を表示します。 1, 2, …シリアルポートを選択します。 Bシリアルポートが開かれている場合、ボーレートを変更する。 (9600, 19200, 38400, 57600, 115200, 234000) L, Shift+Lシリアルポートの入出力のログを開始します。終了時にはログファイルが Windows であればメモ帳、macOS であれば ログビューア で開かれます。Shift+L でログ格納フォルダを開きます。
その他の操作 キー 意味 Alt(⌘)+Shift+Ctrl+mMWX ライブラリコードのフォルダを開きます。 Alt(⌘)+Shift+llog フォルダを開きます。
マウス操作 Windows
macOS
Linux
RasPi
マウス操作は左クリックが中心ですが、右クリック、右ダブルクリック、ホイールを使う場合があります。
マウス操作 意味 左クリック 選択 左クリックしながらドラッグ 画面によっては利用(グラフ画面でのドラッグ) 左ダブルクリック 使用しない 右クリック 画面によっては使用する 右ダブルクリック 画面から脱出する(ESC ESCと同様) ホイール 画面によって利用する(グラフ画面で拡大縮小)
マウスによるA,B,Cボタン Windows
macOS
Linux
RasPi
画面下部のメニュー表示にマウスポインタを移動すると、[ A ], [ B ], [ C ] という表記のボタンが表示されます。 TWELITE STAGE APPは、この3つ並びのハードウェアボタンを模したメニューに画面ごとの機能を割り当てています。 このボタンを左クリックまたは左長押しクリックすることで、機能を呼び出しできます。(Alt(⌘)+a,s,d`` または Alt(⌘)+Shift+a,s,d`でも選択可能)
画面下部の仮想[ B ]ボタンの表示例
マウスによる画面操作 Windows
macOS
Linux
RasPi
Windows/macOS/Linuxでは、TWELITE STAGE APP の画面を原則文字列のみで構成しますが、メニューやボタン、タブについてはマウスによる操作が可能です。
コマンダー画面例
画面はテキストのみの構成ですが、画面上部のタブや、反転表示の文字はマウスの左クリックで選択可能です。
1.2.1.2.2 - 画面の操作 TWELITE STAGE APP の各画面における操作説明
Windows
macOS
Linux
RasPi
メニュー画面の例
Windows / macOS / Linux / Raspberry Pi TWELITE STAGE APPはコンソール画面(コマンドライン)から起動するアプリケーションです。コンソール画面とウインドウ画面の両方に情報を出力します。
コンソール画面には、ターミナルと同様にUART出力を表示します。
一部の環境でコンソール画面の入力を受け付ることがありますが、確認済みの正式機能という位置づけではありません。
Raspberry Pi (nox) X11 を使わず、フレームバッファに表示します。
通常(フレームバッファ上のシェル画面から起動した場合)はコンソール画面を表示しません。
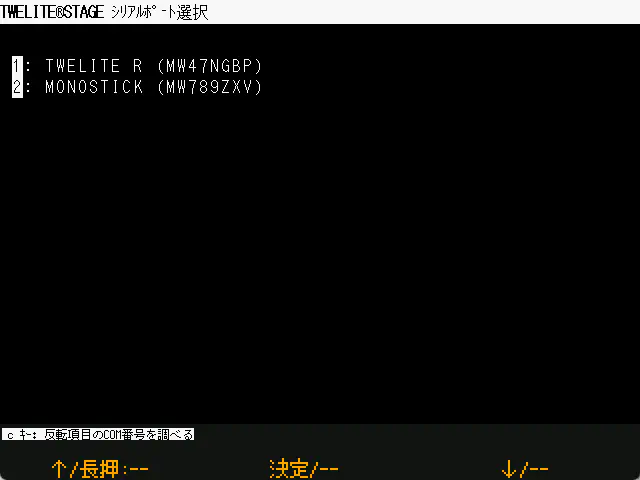
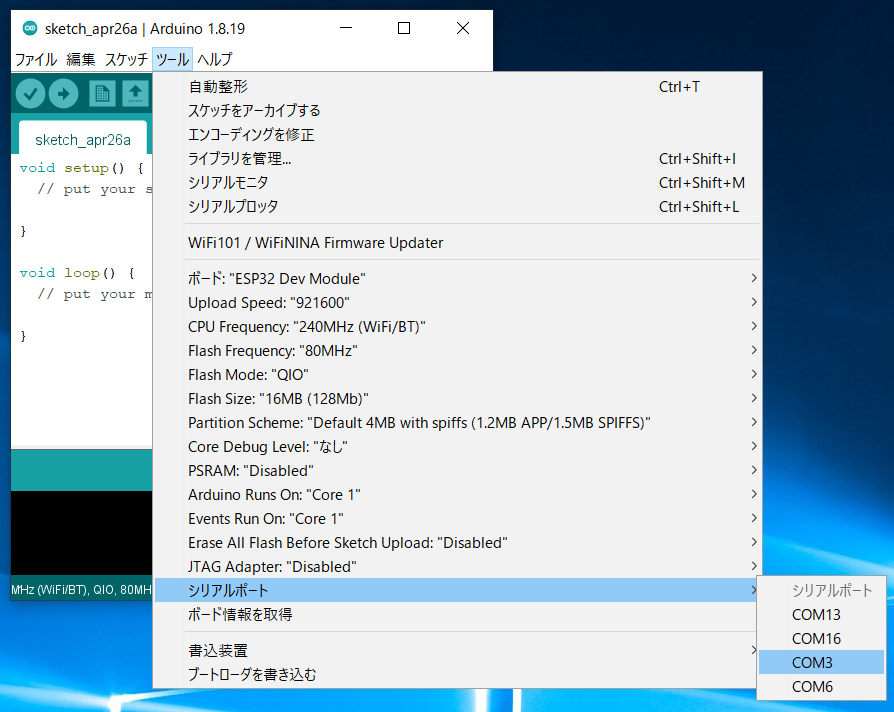
1.2.1.2.2.1 - シリアルポート選択 シリアルポート選択画面の操作説明
Windows
macOS
Linux
RasPi
概要 Windows / macOS / Linux では、始動時にTWELITEが接続されたシリアルポートを選択する画面を表示します。 ただし、シリアルポートは、あとから接続することもできます。
シリアルポート選択画面の例
TWELITE STAGEアプリでは、シリアルポートの選択と各画面の処理は連携しません。 例えば、シリアルポートの選択をしていない状態で、ビューアを起動しても表示は更新されません。この状態でシリアルポートを選択すると、ビューワの表示が更新されます。
なお、シリアルポートは Alt(⌘)+0, 1, 2, … のキー操作でいつでも切り替えできます。
Windows cキーを押すと、リストで反転中のシリアルポートのCOMポート名が表示されます。
Raspberry Pi Raspberry Pi ではUSBデバイスに加えて/dev/serial0 /dev/serial1があれば serial0, serial1 を表示します。なお、通常はserial0を使用します。
1.2.1.2.2.2 - メインメニュー メインメニュー画面の操作説明
Windows
macOS
Linux
RasPi
階層化されたメニューの最上位に位置します。
メインメニュー画面の例
この画面では、メニュー選択を行います。メニューを反転すると、下部緑色文字部分に簡易的な解説を表示します。
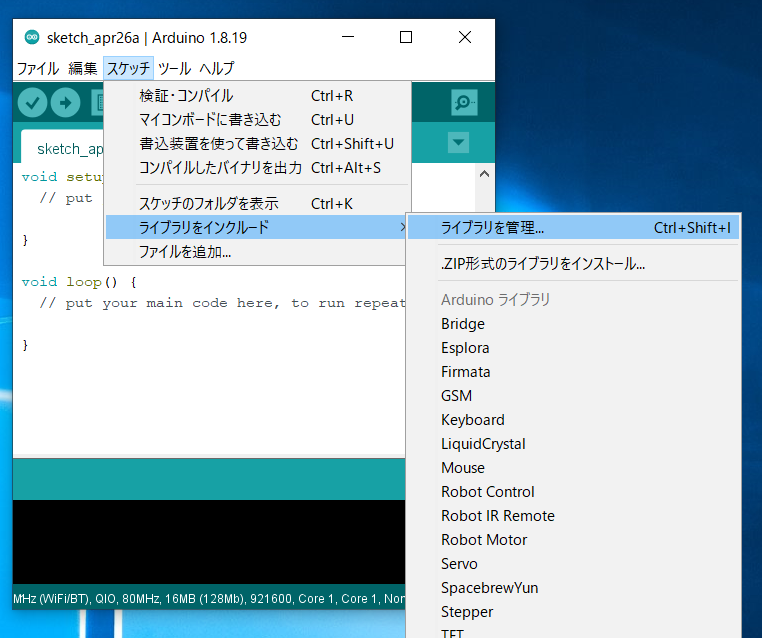
ビューア : TWELITE から受信した電文を解釈して表示するビューアです。多くの場合、受信側の TWELITE には App_Wings を書き込んでおきます。 アプリ書き換え : ファームウェアをビルドし、接続した TWELITE に書き込みます。 インタラクティブモード : 接続した TWELITE 設定を、インタラクティブモードによって行います。 TWELITE STAGEの設定 : TWELITE STAGE アプリの各種設定を行います。 シリアルポートの選択 : シリアルポートを選択します。 説明書 : 説明書を表示するメニューです。以下の説明書をブラウザで開きます。TWELITE STAGE アプリ(この文書) MWX ライブラリ TWENET_C ライブラリ 1.2.1.2.2.2.1 - ビューア ビューアについて
Windows
macOS
Linux
RasPi
ビューアは、接続した TWELITE から受信した情報を表示したり、コマンドを送ったりするための機能です。
各々のビューアは、比較的小規模なプログラムで mwm5 ライブラリの使用方法のサンプルを兼ねています。
1.2.1.2.2.2.1.1 - ターミナル ターミナル画面の操作説明
Windows
macOS
Linux
RasPi
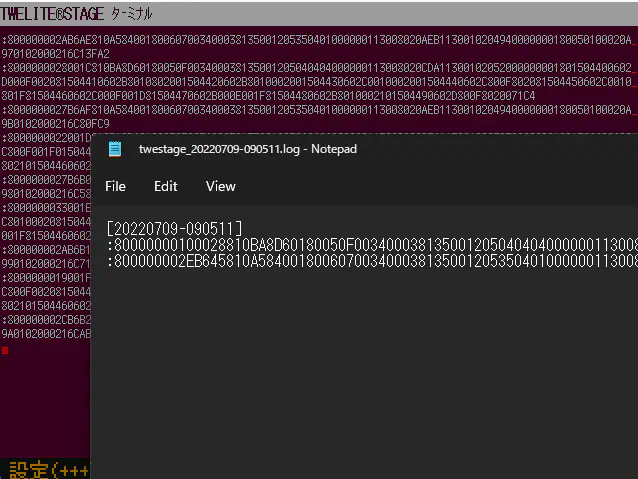
ターミナル画面の例
概要 一般的なVT100系のシリアルターミナルです。
TWELITE のインタラクティブモードやリセット制御をサポートしています。
操作 操作 説明 [ A ] + + + シーケンスの入力(インタラクティブモード)[ A ]長押し この画面を抜けて、前のメニューに戻ります。 [ B ] 大きなフォントで最初の画面の部分領域を表示します。カーソルが画面中に表示されるように領域を選びますが、画面出力によっては見たい部分が見えない場合もあります。 [ B ]長押し 折返し制御のON/OFFを変更します。標準では折返し表示を行うようになっていますが、折り返ししないように表示することもできます。画面右端以降の文字列は表示されません。 [ C ] ファーム書換画面に移動します。ファームウェアの開発中には頻繁にソースコードの修正、動作確認、ビルド&書き込みを行うため、ショートカットを用意しています。 [ C ]長押し TWELITE のリセットピンを制御し、リセットします。 ESC ESCESCキーを2回素早く入力することで、この画面を抜けます。※ 殆どの画面ではESCキーを1回押すことで画面から抜ける操作となっていますが、ターミナルではESCキーの単独入力を使用する場合があるため、2回連続入力の割当になっています。
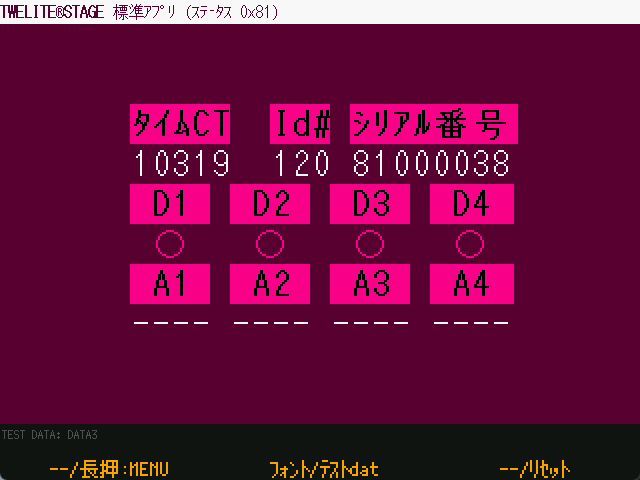
1.2.1.2.2.2.1.2 - 標準アプリ ビューア 標準アプリビューア画面の操作説明
Windows
macOS
Linux
RasPi
標準アプリビューア画面の例
概要 通信相手の TWELITE には App_Twelite(標準アプリ)を書き込んでおきます。標準アプリのボタンやアナログ入力の状態のメッセージ (0x81メッセージ) を受信すると、その内容を mwm5 のパーサーライブラリにより解釈して表示します。
PC に接続する TWELITE に App_Twelite(標準アプリ) または App_Wings(親機・中継機アプリ)を書き込んでおき、通信相手のTWELITEから受信したデータがターミナルに表示されることを確認してから使用してください。
操作 操作 説明 [ A ] 割当なし [ A ]長押し この画面を抜けて、前のメニューに戻ります。 [ B ] フォントを変更します。 [ B ]長押し テスト用のダミーデータによる画面表示を行います。 [ C ] 割当なし [ C ]長押し TWELITE のリセットピンを制御し、リセットします。 ESC ESCESCキーを入力することで、この画面を抜けます。
1.2.1.2.2.2.1.3 - グラフ グラフ画面の一覧
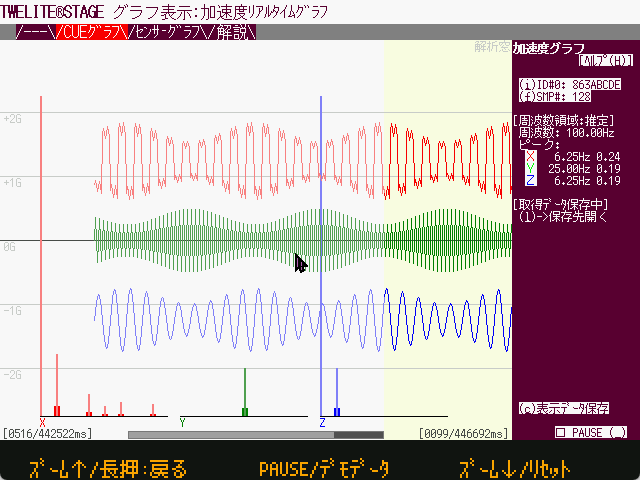
加速度リアルタイムグラフ:加速度センサーのパケットをリアルタイムで表示します。周波数領域の表示や CSV ファイルの保存ができます。 センサーグラフ:TWELITE 各種センサーのデータを sqlite3 データベースに保存し、グラフを表示します。 1.2.1.2.2.2.1.3.1 - 加速度リアルタイムグラフ 加速度リアルタイムグラフ画面の操作説明
Windows
macOS
Linux
RasPi
デモデータの表示例
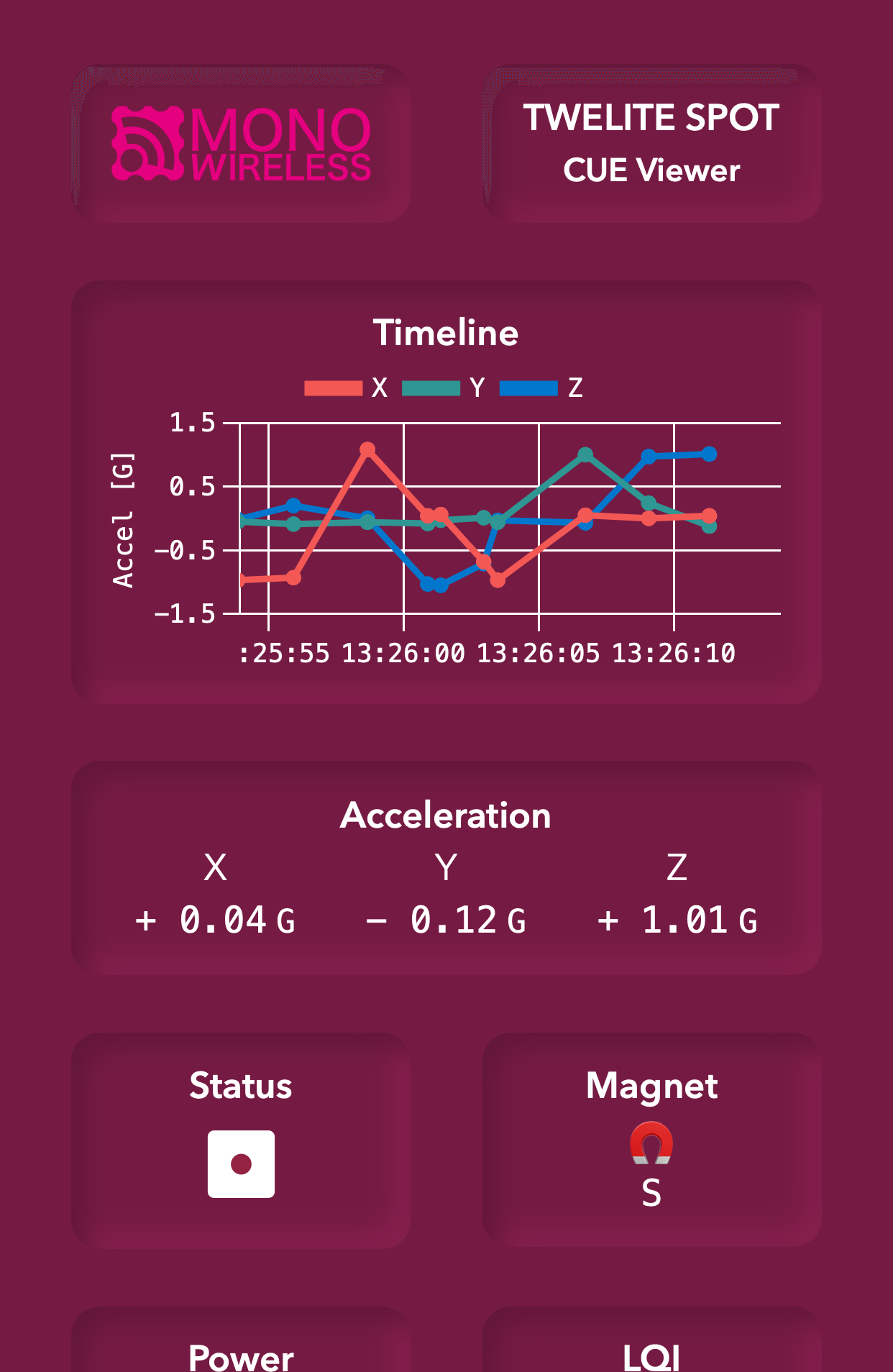
概要 TWELITE CUE や TWELITE 動作センサーPAL から受信したパケットを参照します。加速度データをリアルタイムで表示できるほか、周波数解析や CSV 出力の機能があります。
加速度リアルタイムグラフでは、各サンプルデータを別々に処理します。
一方、
センサーグラフ では、1パケットに複数サンプルが含まれるような連続計測を行う場合であっても、1パケットを1サンプルとして記録します。
CUE モード、MOTモード、2525 FIFO モードの3種類に対応しています。
連続したサンプルが一定数(解析窓)以上になると、XYZ軸を周波数解析した表示を行います。ただし 2525 FIFO モードでは常に連続していると仮定します。
パケットの区切りが明示的である場合(直前のパケットから3秒以上経過したとき、CUEモードは1パケットごと、MOTモードはパケットのシーケンス番号が不連続になった場合)には、4サンプル分のダミーデータを挿入しピンク色の背景色を表示します。
先着順に最大4ノードまでのデータを格納します。
複数ノード運用時には、互いのパケット衝突により通信の失敗が多くなります 。特に FIFO モードでは、送信周期がほぼ一定で互いにほぼ同時期にパケット送信を試み、干渉により送信が失敗するといったことが長時間続く場合があります。原則として無線チャネル1つにつき、1ノードという運用を行ってください。
工場出荷時の TWELITE CUE は TWELITE CUE モード に設定されています。
連続したデータを計測する場合は動作センサーパルモード に変更してください。
加速度リアルタイムグラフを使用する場合における動作センサーパルモードの代表的な設定を以下に記します。
連続的に約 25Hz で計測したいときt: set Transmission Interval (0)p: set Sensor Parameter (03000000) 連続的に約 50Hz で計測したいときt: set Transmission Interval (0)p: set Sensor Parameter (03000100) 連続的に約 100Hz で計測したいときt: set Transmission Interval (0)p: set Sensor Parameter (03000200) 約10秒おきに 約 100Hz で128サンプル分計測したいときt: set Transmission Interval (10)p: set Sensor Parameter (03000208) 約10秒おきに 約 100Hz で256サンプル分計測したいときt: set Transmission Interval (10)p: set Sensor Parameter (03000210) 約10秒おきに 約 50Hz で64サンプル分計測したいときt: set Transmission Interval (10)p: set Sensor Parameter (03000104) 約10秒おきに 約 200Hz で128サンプル分計測したいときt: set Transmission Interval (10)p: set Sensor Parameter (03000308) 操作 操作 説明 右上部(i)ID# ボタン クリックするごとにIDの切り替えを行います。(注:FIFOモードによる連続サンプルデータは、複数IDによる運用に向きません) 右上部(f)SMP# ボタン クリックするごとに解析窓サイズを 64,128,256 と変更します。 右下部(c)表示データ保存 ボタン log フォルダにCSV形式のデータ出力を行います。バッファにある最も古いサンプルから、画面右端の最新のサンプルまでを出力します。(注:出力数は常に 5120 サンプルであり、末尾のデータが最新です)右下部PAUSE( ) ボタン 表示更新を中断します。(注:サンプルの取得は内部の一時サンプルバッファが一杯になるまで行います) マウスドラッグ(グラフ部分) 表示サンプルの位置を移動します。 マウスドラッグ(下部スクロールバー) より大きなステップで表示サンプルの位置を移動します。 カーソルキー→ ← サンプルの表示領域を移動させます。 カーソルキー↑ ↓ サンプルの横軸を拡大・縮小(等倍 / 2倍 / 3倍 / 4倍)します。(注:解析サンプル数 256 の場合は2倍まで)
サンプルレートの推定 サンプリングレートは、パケットの受信時間から計算しています。過去複数サンプルの受信時間を平均して1サンプル分としているため、パケットの飛びなどがある場合は誤差が大きくなります。
また、関連するログ記録のタイムスタンプ(T_SMPL)も同様に推測値であり、パケット取得時と比較して遅れたタイムスタンプになります。
なお、サンプルレートの推定が終わると、グラフ表示のスクロールをスムーズにします。
CUEグラフモードの起動時に開く [STAGE 共通設定→起動アプリ指定]にて31を指定してください。
ログ出力(表示データ保存) (c)表示データ保存 ボタンを押すことで、画面上の表示位置(右端サンプル)を起点とした最大 512 サンプル分のデータを出力できます。
最新のサンプルが末尾に記録されるため、冒頭には何もデータが無い場合がある点に注意してください。
ログファイル名は {logフォルダ}/acc_snap_{タイムスタンプ}.csv です。
データは、画面右端の一番新しいサンプルが 512 番目(ファイルの末尾)です。 周波数解析実行時は、最後のサンプルから 周波数解析サンプル数分が対象です。 周波数解析対象サンプルが記録されている行に周波数解析結果を追加しています(64 サンプルの場合は 449 番目から 32 行が結果で DC 成分から高周波成分までが並びます)。 ラベル 項目名 説明 #サンプル番号 T_PKT[ms]パケット受信時刻 1パケットに複数のサンプルが含まれるため、同じタイムスタンプのサンプルが並びます。 SEQパケット続き番号 各パケットに付与されており、連続していればパケットの欠落がないと考えられます。 T_SMPL[ms]サンプル時刻(仮想・推定) パケットの受信時刻から生成した各サンプルのタイムスタンプです。実際にサンプルが行われた時刻とは一致しません。(注:サンプルレートをパケット受信間隔から推定しているため誤差が大きくなるほか、サンプル周期を都度加算しているため実際のサンプル時刻よりも1パケット周期分遅れたタイムスタンプを記録します) X[G]X軸のサンプル値 単位はGです。センサーの値に基づいています。 Y[G]Y軸のサンプル値 単位はGです。センサーの値に基づいています。 Z[G]Z軸のサンプル値 単位はGです。センサーの値に基づいています。 FD#周波数解析計算値の番号 周波数解析サンプル数が 64 の場合は DC,1,2,...,31 の順で並びます。 Hz周波数解析計算結果の周波数軸の値 推定の周波数です。(FD# / FD_Len) * FD_Freq のように計算しています。 XX軸の周波数解析計算値 YY軸の周波数解析計算値 ZZ軸の周波数解析計算値 Label追加情報名 下表 参照Info追加情報 下表 参照
追加情報 情報名 解説 ModuleSID送信側のシリアル番号 Tick[ms]ログファイルを開いたときのシステム時間(注:TWELITE STAGEアプリ側) Dateログファイルを開いたときの日付 Timeログファイルを開いたときの時刻 Time_Msec_partログファイルを開いたときの秒未満部分 [ms] Samples有効サンプルデータ FD_Len周波数解析サンプル数 FD_Start#周波数解析開始サンプル番号 FD_Freq周波数解析範囲の周波数推定値[Hz](注:サンプル受信間隔からの推定)
ログ出力(自動保存) 加速度リアルタイムグラフ画面を開き、データが入力された時点から自動的にログファイルを出力します。
ログファイル名は logフォルダ/accel_{シリアル番号}_{タイムスタンプ}.csv です。
画面を開いている間はファイルの書き出しを行うため、その間には読み出し用に開けない、またはすべてのデータが読み出せない場合があります。
ラベル 項目名 説明 #サンプル番号 T_PKT[ms]パケット受信時刻 1パケットに複数のサンプルが含まれるため、同じタイムスタンプのサンプルが並びます。 SEQパケット続き番号 各パケットに付与されており、連続していればパケットの欠落がないと考えられます。 T_SMPL[ms]サンプル時刻(仮想・推定) パケットの受信時刻から生成した各サンプルのタイムスタンプです。実際にサンプルが行われた時刻とは一致しません。(注:サンプルレートをパケット受信間隔から推定しているため誤差が大きくなるほか、サンプル周期を都度加算しているため実際のサンプル時刻よりも1パケット周期分遅れたタイムスタンプを記録します) X[G]X軸のサンプル値 単位はGです。センサーの値に基づいています。 Y[G]Y軸のサンプル値 単位はGです。センサーの値に基づいています。 Z[G]Z軸のサンプル値 単位はGです。センサーの値に基づいています。 Label追加情報名 下表 参照Info追加情報 下表 参照
追加情報 情報名 解説 ModuleSID送信側のシリアル番号 Tick[ms]ログファイルを開いたときのシステム時間(注:TWELITE STAGEアプリ側) Dateログファイルを開いたときの日付 Timeログファイルを開いたときの時刻 Time_Msec_partログファイルを開いたときの秒未満部分 [ms]
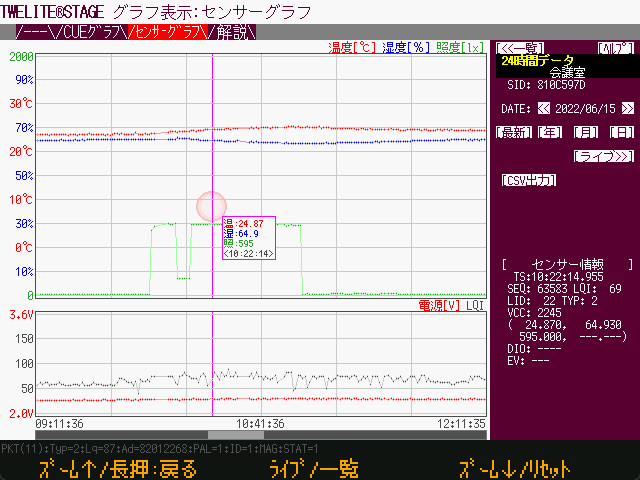
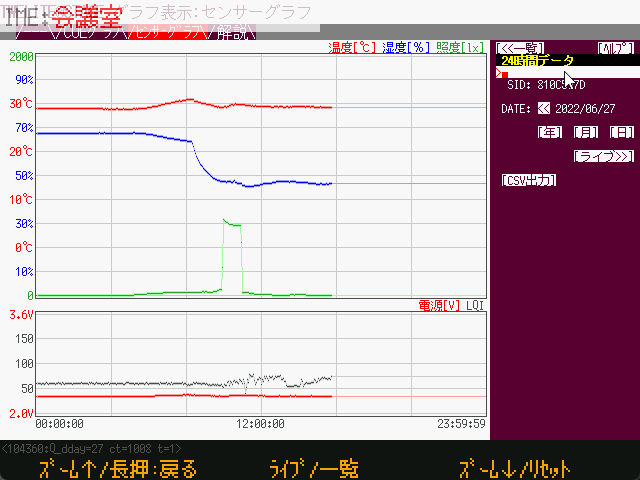
1.2.1.2.2.2.1.3.2 - センサーグラフ センサーグラフ画面の操作説明
Windows
macOS
Linux
RasPi
データの表示例
概要 各種センサーデータを SQLite データベースに記録し、画面上にグラフ形式で表示します。データベースファイルは外部のアプリケーションから参照することも可能です。
同一実行形式名の TWELITE STAGE APP を複数起動して、センサーグラフを同時に使用することはできません。
データベースファイルは {MWSTAGEインストール}/log フォルダに格納され、TWELITE STAGE APP の実行形式名をもとにファイル名が決まります。同一の実行形式名である場合は、同じデータベースファイルを参照してしまいます。TWELITE STAGE APP の実装では、複数のアプリが同時に同一のデータベースにデータを追加することを想定していません。また、場合によってはデータベースファイルのアクセスエラーとなり、TWELITE STAGE APP がクラッシュすることもあります。
例えば、MONOSTICK を PC に2台接続して、同時に複数の「センサーグラフ」を動作させたい場合には、別の実行形式名 (TWELITE_Stage_a.exe, TWELITE_Stage_b.exe) とした TWELITE STAGE アプリを複数実行します。このときのデータベースファイル名はそれぞれ log/TWELITE_Stage_a_WSns.sqlite, log/TWELITE_Stage_b_WSns.sqlite です。
データベースには SQLite (sqlite3) を使用しており、{MW_STAGE Install}/log/{実行形式名}_WSns.sqlite というファイルに格納されます。 画面遷移は [一覧(グラフプレビューあり)]>[24時間データ] >[ライブビュー]です。[24時間データ] から更に [年] [月] [日(グラフプレビューあり)] 選択画面に遷移できます。 [ライブ]表示画面について一覧から特定のノードを選択します。 1秒おきのリアルタイム表示を行い、過去 450 秒間のデータを表示します。 [24時間データ] 表示画面について特定の日のデータを表示します。 1秒おきの更新とし、その間に複数のデータがあった場合は間引かれます。 最大拡大時(1ピクセル1秒)以外は、各ピクセルの範囲における取得値の平均を表示します。 値が画面よりはみ出す場合は、上下端に測定点を表示します。 現在時刻が含まれる場合には、新着データで表示を更新します。 マウスホイールやカーソルキー↑ ↓の入力:時間軸の拡大・縮小 マウスポインタの移動:マウスポインタに対応した時間軸にある取得データを簡易表示します。 マウスクリック&ドラッグ:スクロール(拡大時のみ) 拡大時はスクロールバーによる操作も可能です。 [CSV出力] 機能では、データベースに含まれるすべての取得値を表示します。操作 操作 説明 マウスドラッグ(グラフ部分) 拡大時に表示サンプルの位置を移動します。 マウスドラッグ(下部スクロールバー) 表示サンプルの位置を移動します。 カーソルキー→ ← サンプルの表示領域を移動させます。 カーソルキー↑ ↓ サンプルの横軸を拡大・縮小します。 [ライブ]1秒刻みで最新のデータを表示するビューに移動します。 [24時間データ]1日単位のグラフに移動します。 [<<一覧]一覧選択画面に移動します。 [年] [月] [日]年月日で、特定の日を選択します。 [最新]今日のデータに移動します。 [CSV出力]1日分のデータをCSVファイルに出力します。 一覧で[表示] リストの表示方式を変更します。 一覧で[ソート] リストの並び順を変更します。 一覧で[↑] リストの並び順を反転します。
センサーノードのメモ(補助情報)の編集 v1.3.9+ 「24時間データ画面」で、画面右上のセンサーノードのメモ部分を左クリックすると、メモを編集するためのプロンプトを使用できます。
センサーノードのメモを編集する様子(IMEオン)
キー 説明 通常の半角文字 通常の半角英数文字列を直接入力した場合は画面上にも表示されます。 IME による入力 IMEからの入力は画面左上部分に入力途上の文字列が表示されます。ENTERキーで入力中の文字列を確定します。 BS表示されている末尾の文字を削除します。 ENTER入力した文字列をデータベースに反映します。
IME入力時の操作方法は、システム環境に依存する場合があります。
また、IME入力時の操作によっては期待しない文字列が入力される場合があります。不要な文字列が入力エリアに表示された場合は BS キーで不要部分を削除してください。
画面遷移 基本の画面は一覧、24時間、ライブの3種類に分けられます。
[一覧] <--> [24時間] <--> [ライブ]
↓↑
[年月日選択]
センサーグラフモードの起動時に開く [STAGE 共通設定 → 起動アプリ指定] にて 32 を指定してください。
DBのテーブルについて sensor_data受信したデータを格納します。
カラム名 型 解説 _uqidINTEGER データベースで使用する続き番号 sidINTEGERint32_t int32_t 型で格納しているシリアル番号です。例えば “8123abcd” というシリアル番号の場合は整数値で -2,128,368,691 の値が格納されます。tsINTEGERint64_t システムがパケットを受信した時刻で、int64_t 型で格納されるタイムスタンプ値です。UNIX epoch (エポック、1970年からの経過秒) です。 ts_msecINTEGER タイムスタンプのミリ秒部分です。 yearINTEGER タイムスタンプよりローカル時間の年部分です。 monthINTEGER タイムスタンプよりローカル時間の月部分です。 dayINTEGER タイムスタンプよりローカル時間の日部分です。 hourINTEGER タイムスタンプよりローカル時間の時部分です。 lidINTEGER ユーザにより割り当てられた LID などの識別値です。 lqiINTEGER 受信強度の目安値です (Link Quality Indicator) 。 pkt_seqINTEGER パケットの続き番号です。どのような値を取りうるのかはファームウェアによって異なります。 pkt_typeINTEGER 無線パケットの種別です。2 PAL AMB 6 ARIA 1 PAL MAG *3 PAL MOT 5 CUE 0x101 App_Twelite *0x103 App_IO*現時点で非対応 valueREAL 計測値です(パケット種別によって定義が異なります)。pkt_type->2,6: 温度[°C]1: 磁石の判定有無 (00->磁石なし, 01->N極, 02->S極)3,5: X軸加速度(パケット中に複数サンプル含まれる場合は平均値)[G]0x101,103: 入力IOのビットマップ(val_dioの下位8ビットと同値) value1REAL 計測値です(パケット種別によって定義が異なります)。pkt_type->2,6: 湿度[%]1: 未使用3,5: Y軸加速度(パケット中に複数サンプル含まれる場合は平均値)[G]0x101: ADC1[V]103: 未使用 value2REAL 計測値です(パケット種別によって定義が異なります)。pkt_type->2: 照度[lx]6: 未使用1: 未使用3,5: Z軸加速度(パケット中に複数サンプル含まれる場合は平均値)[G]0x101: ADC2[V]103: 未使用 value3REAL 計測値です(パケット種別によって定義が異なります)。pkt_type->2: 未使用6: 未使用1: 未使用3,5: 未使用0x101: ADC3[V]103: 未使用 val_vcc_mvINTEGER 電源電圧[mV] val_dioINTEGERint32_t b0..b7: DI1..DI8の値 (1はLOW, 0はHIGHレベル)b24..b25: マグネット値 (b28が1の場合) 00->磁石なし, 01->N極, 10->S極b28: 1の場合マグネットデータがb24..b25に格納されるb31: 定期送信ビット(マグネットのみ)val_adc1_mvINTEGER pkt_type->1,2,3,0x101: ADC1の計測値val_adc2_mvINTEGER pkt_type->0x101: ADC4の計測値val_auxINTEGER その他データ格納目的 ev_srcINTEGER イベント発生元 ev_idINTEGER イベントIDpal_type->5: サイコロ(1...6)16→MOVE他資料参照 ev_paramINTEGER イベントパラメータ
sensor_nodeセンサーノードにテキストメモ(付加情報)を格納します。
カラム名 型 解説 sidINTEGER 上述のSID sid_textTEXT 可読性のためにSIDを16進数に変換した文字列 descTEXTUTF-8 SIDに対応するメモ(補助情報)。一覧などで表示する
sensor_last最後に受信したタイムスタンプを管理します。
カラム名 型 解説 sidINTEGER 上述のSID tsINTEGER 最後の受信したときのタイムスタンプ lid以下、最後に受信時のデータの抜粋 lqipkt_typevaluevalue1value2value3val_vcc_mvval_dioev_id
1.2.1.2.2.2.1.4 - 簡易モニタ 簡易モニタの一覧
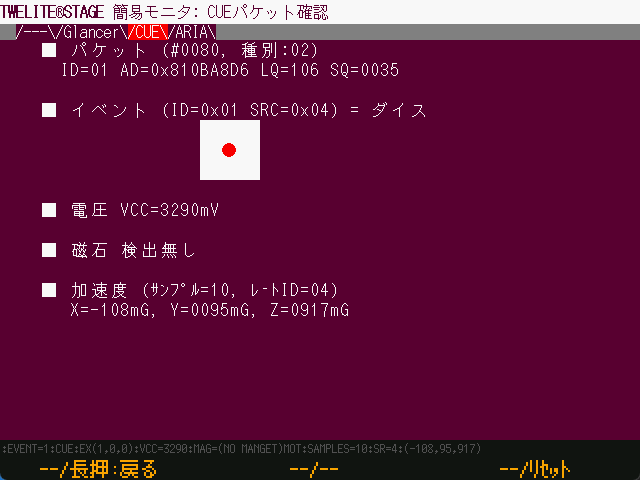
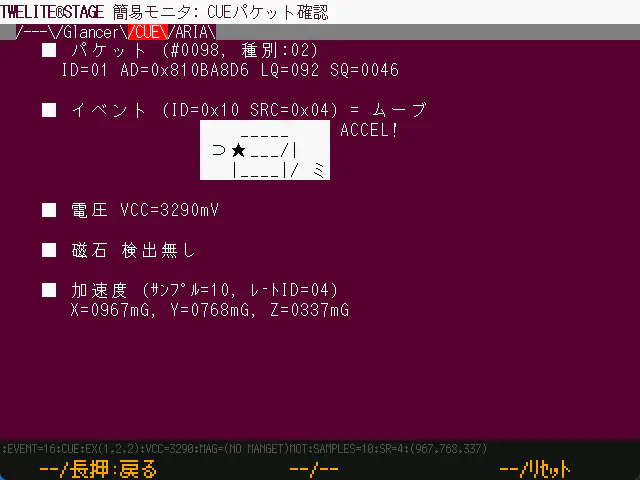
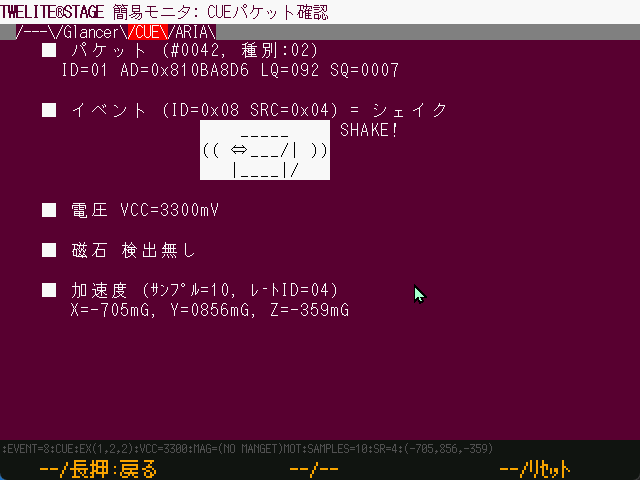
CUEビューア : TWELITE CUE からのパケットを解釈して簡易表示します ARIAビューア : TWELITE ARIA からのパケットを解釈して簡易表示します Glancer : TWELITE の多くの形式に対応した簡易モニタです 1.2.1.2.2.2.1.4.1 - CUE ビューア CUE ビューア画面の操作説明
Windows
macOS
Linux
RasPi
このページには旧バージョンのキャプチャ画像が含まれます。
サイコロ面の検出例
概要 TWELITE CUE から受信したメッセージを解釈して表示します。
TWELITE CUE の動作 工場出荷時の TWELITE CUE は、TWELITE CUEモード に設定されています。
TWELITE CUEモードでは、コイン電池で駆動できるように間欠駆動をしながら、いくつかの要因によってスリープから起床して、様々なデータを送信します。
CUEモードは TWELITE CUE の動作確認を想定しているため、搭載するセンサーやLEDのすべてを動作させます。
起床要因 TWELITE CUE がスリープから起床するには、以下のうちいずれかの要因を必要とします。
タイマーによる起床(定期的な起床) 加速度の検出による起床 磁気センサーによる起床(磁石が近づいたことを検出した場合) 送信するデータの種類 TWELITE CUE は、以下のデータをパケットに収めて送信します。
検出イベント(後述 ) モジュール電源電圧 磁気センサーの検出値 加速度データ パケットの属性 受信したパケットの属性からは、その基本情報を得ることができます。
属性 解説 #???? これまでの受信パケット数です。 種別 mwm5ライブラリにおけるE_PKTの値で、パケット種別です。TWELITE CUEからのパケットは通常PKT_PAL=02です。ID 送信元の論理IDです。通常は0..100の値になります。 AD 送信元のシリアル番号です。 LQ 受信強度の目安値です (Link Quality Indicator) 。 SQ パケットの続き番号です。
イベント TWELITE CUEモードでは、必ず加速度イベントを出力します。
起床要因に関わらず、起床後には一定サンプル数の加速度を計測します。このとき、加速度の計測結果に応じてイベントを判定します。
イベント 番号 解説 ダイス 1(0x00) .. 6(0x06)定期起床と磁気センサー検出起床を起点に判定します。起床後に大きな加速度が検出される場合は、判定不可としたイベント(0xFF)を検出する場合があります。 ムーブ 16(0x10)加速度センサーが一定以上の加速度を検出したときに、ムーブまたはシェイクのイベントが発生します。ムーブは、計測した加速度の変化が比較的小さい場合(加速度の変化は検出したが、連続的な加速度の変化がなかった場合)に発生します。 シェイク 0x08加速度センサーが一定以上の加速度を検出したときに、ムーブまたはシェイクのイベントが発生します。シェイクは、計測した加速度の変化が比較的大きい場合(連続的な加速度の変化を検出した場合)に発生します。
加速度のしきい値やイベントの検出条件について、定量的な定義は案内しておりません。
電圧 モジュールの電源電圧[mV]です。
磁石 検出された磁石の極または未検出を表示します。
磁気センサーの検出による起床であるかどうかを表示する機能はありません。
加速度 起床後に計測された加速度を表示します。
サンプル:加速度のサンプル数を表示しています。10サンプル固定です。 レートID:加速度のサンプルレートです。04固定で100Hzです。 X,Y,Z:3つの軸の加速度です。8サンプル分の平均値として求めています。単位はミリG (1000mG=1G=9.8m/s2)です。 画面の表示例 ムーブイベントの検出例
シェイクイベントの検出例
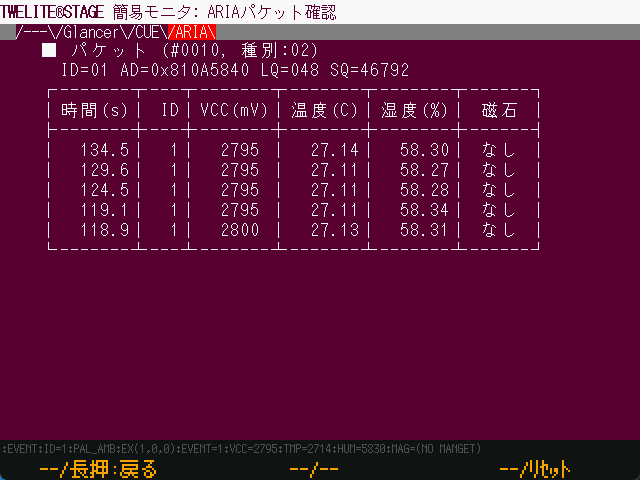
1.2.1.2.2.2.1.4.2 - ARIA ビューア ARIA ビューア画面の操作説明
Windows
macOS
Linux
RasPi
このページには旧バージョンのキャプチャ画像が含まれます。
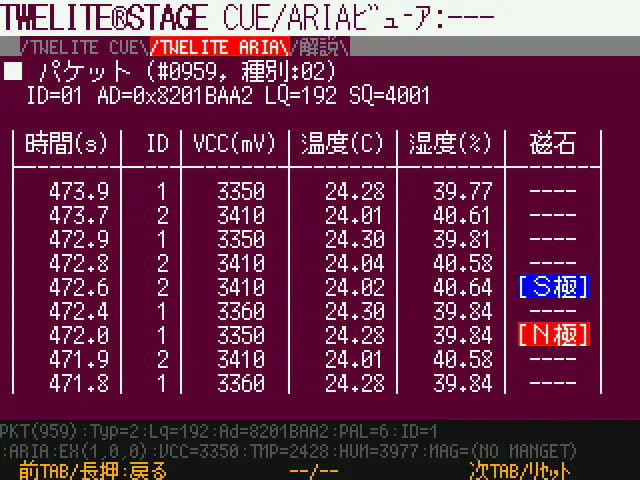
温湿度データ表の表示例
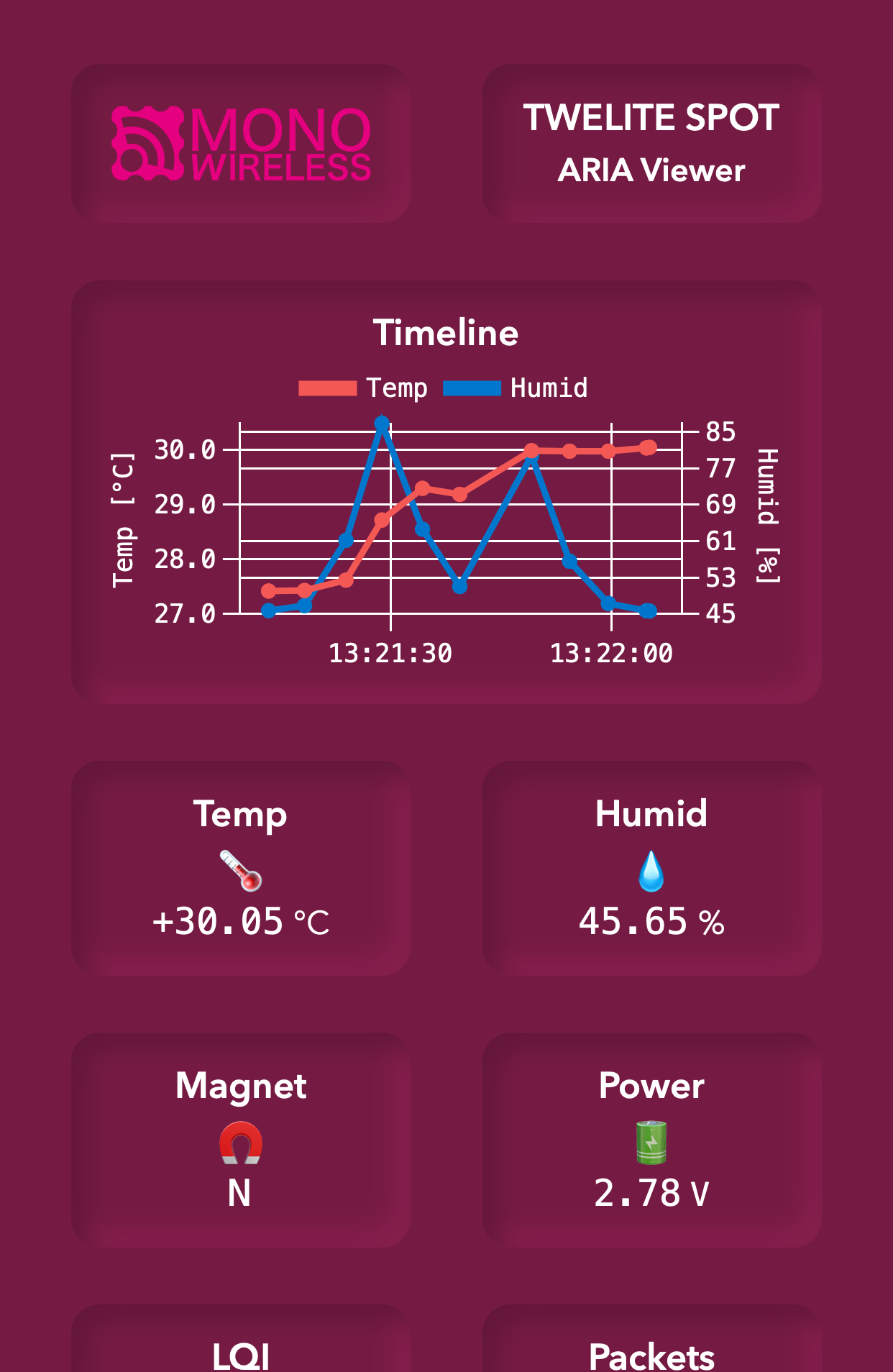
概要 TWELITE ARIA から受信したメッセージを解釈して表示します。
TWELITE ARIA の動作 工場出荷時の TWELITE ARIA は、TWELITE ARIAモード に設定されています。
TWELITE ARIAモードでは、コイン電池で駆動できるように間欠駆動をしながら、いくつかの要因によってスリープから起床して、様々なデータを送信します。
起床要因 TWELITE ARIA がスリープから起床するには、以下のうちいずれかの要因を必要とします。
タイマーによる起床(定期的な起床) 磁気センサーによる起床(磁石が近づいたことを検出した場合) 送信するデータの種類 TWELITE ARIA は、以下のデータをパケットに収めて送信します。
モジュール電源電圧 磁気センサーの検出値 温湿度データ パケットの属性 受信したパケットの属性からは、その基本情報を得ることができます。
属性 解説 #???? これまでの受信パケット数です。 種別 mwm5ライブラリにおけるE_PKTの値で、パケット種別です。TWELITE ARIAからのパケットは通常PKT_PAL=02です。ID 送信元の論理IDです。通常は0..100の値になります。 AD 送信元のシリアル番号です。 LQ 受信強度の目安値です (Link Quality Indicator) 。 SQ パケットの続き番号です。
温湿度データ表 TWELITE ARIAから受信した過去9回分のデータの履歴を表示します。最新のデータが最上部に表示されます。
時間[s] TWELITE STAGE APPが起動してからデータを受信するまでの時間[秒]です。
ID モジュールの論理デバイスIDです。
VCC(mV) モジュールの電源電圧[mV]です。
温度(C) モジュールが計測した温度(°C)です。
湿度(%) モジュールが計測した湿度(%)です。
磁石 検出された磁石の極または未検出を表示します。
磁気センサーの検出による起床であるかどうかを表示する機能はありません。
1.2.1.2.2.2.1.4.3 - グランサー グランサー画面の操作説明
Windows
macOS
Linux
RasPi
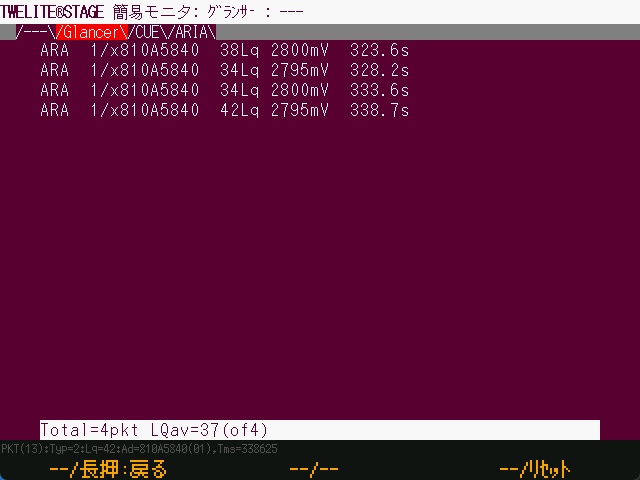
概要 Glancer は、受信メッセージ中の情報 を簡易的に表示します。
接続する TWELITE には App_Wings を書き込んでおくことで、通信相手のTWELITE (App_Twelite, TWELITE PAL, … アプリケーションIDと周波数チャネルを一致させれば混在も可) から受信した情報を表示できます。
Glancer は、glance(=ちらりと見る、一瞥)する人という意味の英単語です。
操作 一覧表示の画面と選択表示の画面を切り替えて使用します。
一覧表示 一覧表示の例
通信相手からの情報を列挙します。
表示内容は(メッセージの種別、論理デバイスID、シリアルID、LQI (Lq)、電源電圧(情報に含まれている場合)、タイムスタンプ)です。
操作 説明 [ A ] リストの前項目に移動します。 [ A ]長押し この画面を抜けて、前メニューに戻ります。 [ B ] 選択表示に移行します。 [ B ]長押し 項目をソートします。ソートを実行するたびに、ソートキーは順に変わります。 [ C ] リストの次項目に移動します。 [ C ]長押し TWELITE のリセットピンを制御し、リセットします。 ESCこの画面を抜けます。
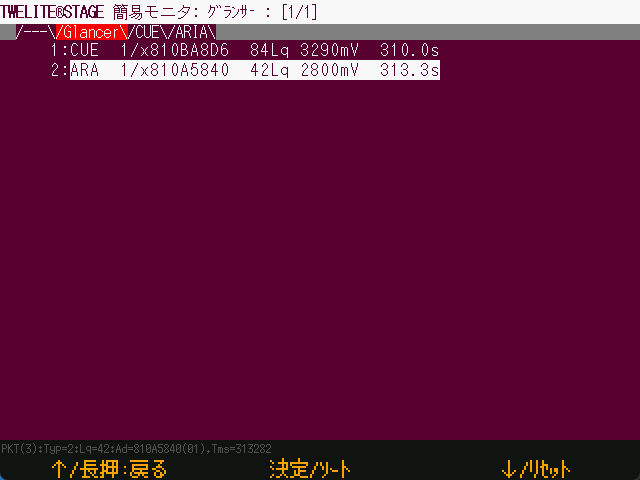
選択表示 選択表示の例
一覧表示で項目を移動し反転表示になったところで選択操作を行うことで、この画面に遷移します。特定の通信相手に関する情報を到着順に表示します。
選択されてからの受信パケット数と LQI の平均値が表示されます。
操作 説明 [ A ] 割当なし [ A ]長押し この画面を抜けて、前メニューに戻ります。 [ B ] 割当なし [ B ]長押し 割当なし [ C ] 割当なし [ C ]長押し TWELITE のリセットピンを制御し、リセットします。 ESC選択画面に戻ります。
1.2.1.2.2.2.1.5 - コマンダー コマンダー画面の操作説明
Windows
macOS
Linux
RasPi
概要 コマンダーは、TWELITE にシリアルメッセージを送信する機能です。
操作 コマンダーの最初の画面は留意事項について記載しています。
画面上部にはテキストで表現されたタブがあり、これをマウスでクリックすることでタブ中の画面に移動できます。
操作 説明 [ A ] タブの移動(左) [ A ]長押し この画面を抜けて、選択画面に戻ります。 [ B ] 割当なし [ B ]長押し 割当なし [ C ] タブの移動(右) [ C ]長押し TWELITE のリセットピンを制御し、リセットします。 ESCこの画面を抜けて、選択画面に戻ります。
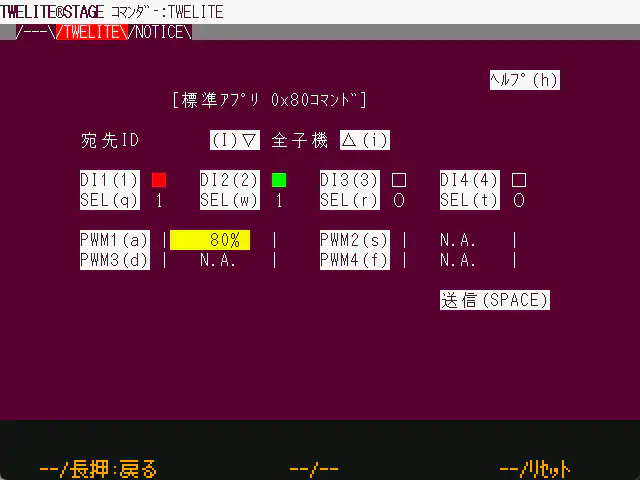
タブ:TWELITE この画面では、 標準アプリ(App_Twelite) の 0x80コマンド を生成し、送信します。
接続する TWELITE には App_Twelite または 親機・中継機アプリ(App_Wings) を書き込んでおき、アプリケーションID・チャネルを設定した上で、通信相手からメッセージが受信されていることを確認してください。
TWELITEタブの表示例
項目 内容 宛先 送信先の TWELITE を指定します。自身が子機の場合は「親機:0」宛を指定してください。自身が親機の場合は「全子機=0x78」または特定の子機ID(1..8まで指定可能)を指定します。 DI1..DI4 DI1からDI4までの設定状態です。■は選択(LOW=GNDレベル)、□は(HIGH=VCCレベル)を意味します。下項目のSELを指定してください。 SEL 各DIの選択ビットです。(0ならDIの指定を無視し、1なら指定を有効化します。) PWM1..4 PWMのデューティ比を設定します。0はGNDレベル相当、1024(100%)はVCCレベル相当です。N.A.にしたPWMポートは変更しません。(注:MW-STA-KIT-0/MW-STA-SOLO-0基板のPWM1はVCCからの吸い込みとなっているため、 LEDは0のときに最も明るく点灯し、100%で消灯します。)
各項目を変更するたびにコマンドが生成されます。送信ボタンを押すと、現在の設定のコマンドを再度送信します。
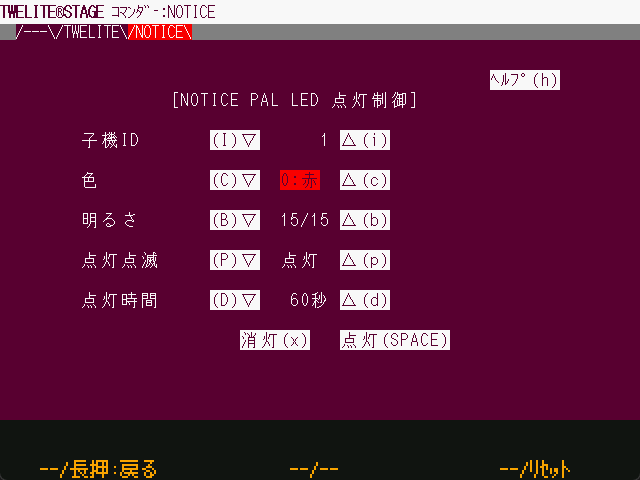
タブ:NOTICE この画面では、通知PAL(NOTICE PAL) の LED制御コマンド を生成します。
接続する TWELITE には App_Wings を書き込んでおき、アプリケーションID・チャネルを設定した上で、通信相手からメッセージが受信されていることを確認します。
TWELITEタブの表示例
項目 内容 宛先 送信先の TWELITE PAL の ID を指定します。値の範囲は 1..8 です。 色 点灯色を7色から指定します。白は2種類ありますが、一方はRGBの混色でもう一方は白色LED単体が点灯します。 明るさ 0..15で指定します。0は消灯です。 点灯点滅 点灯または点滅パターンを選択します。 点灯時間 コマンド発行後、一定時間経過すると自動的に消灯する機能です。 消灯(x) 消灯メッセージを生成し、LEDを消灯させます。 点灯(SPACE) 現在の設定を送信し、LEDを点灯させます。
各項目を変更するたびにコマンドが生成されます。送信ボタンを押すと、現在の設定のコマンドを再度送信します。
画面下部の表示 画面下部には、コマンドが生成されたタイムスタンプと :で始まるコマンドが表示されます。クリップボードにはこの画面の内容がコピーされます。
1.2.1.2.2.2.2 - アプリ書換 アプリ書換の機能について
Windows
macOS
Linux
RasPi
アプリ書換機能では、TWELITE のアプリ(ファームウェア)を書き込むことができます。
ビルド済みの.BINファイルを書き込む アクト(act)などのソースファイルからビルドして書き込む ソースファイルのビルド、ターミナル切断、書き込みユーティリティ起動、ターミナル接続といった煩雑さを解消できます。
TWELITE を自動で認識する 書き込み終了後にリセットしてからインタラクティブモードまたはターミナルに遷移する 各プロジェクトのリストから、プロジェクトフォルダまたはVSCode等の環境を起動する (Raspberry Pi版を除く) 各プロジェクトのリストから、関連情報のウェブページを開く (Linux版、Raspberry Pi版を除く) 1.2.1.2.2.2.2.1 - BINから選択 BINから選択の画面の操作説明
Windows
macOS
Linux
RasPi
概要 ビルド済みのアプリ(.BINファイル)を書き込むことができます。
BINから選択画面の例
メニューを選択すると、.BINファイルの一覧が表示されます。書き込むファームウェアを選択してください。
あらかじめ用意されている.BINファイルとは別のファイルを使用する際は、メニューを選択する前に書き込むファイルを以下に格納してください。
プラットフォーム 場所 Windows, macOS, Linux, Raspberry Pi {MWSTAGEフォルダ}/BIN
BINフォルダには、ファイル名を変更せずに TWELITE STAGE でビルドした .BINファイル(各プロジェクトのbuildフォルダ以下に格納されています)を格納してください。
../BIN/App_Wings_MONOSTICK_BLUE_L1304_V1-1-3.bin
App_Wings_MONOSTICK_RED_L1304_V1-1-3.bin
App_Twelite_BLUE_L1304_V1-9-1.bin
App_Twelite_RED_L1304_V1-9-1.bin
...
この機能では、ファイル名から TWELITE(BLUE/REDなど) の識別を行っています。
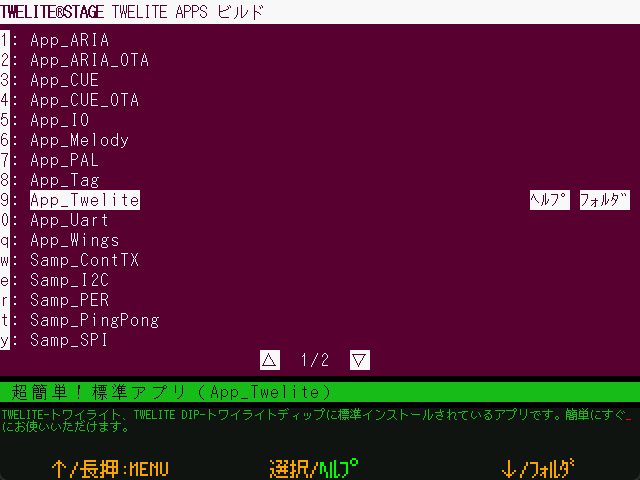
1.2.1.2.2.2.2.2 - actビルド&書換 actビルド&書換の画面の操作説明
Windows
macOS
Linux
RasPi
概要 MWX ライブラリによって記述されたアクト(act)のビルドと書き換えを行うことができます。
サンプルアクト選択画面の例
この画面では、以下のパスに配置されたアクトによるプロジェクトの一覧を表示します。
{MWSTAGEインストールフォルダ}/MWSTAGE/Act_samples
デフォルトでは、サンプルとしてご利用いただくことを想定した比較的小規模なプロジェクトを収録しています。
操作 一覧から書き込むプロジェクトを選択することで、ビルド~書き込みを行えます。
なお、書き込み終了後に ENTER または[ B ]ボタンを押すことで、TWELITE をリセットしてインタラクティブモード画面(もしくはターミナル画面、要設定)に遷移できます。
ビルド~書き込み画面
VSCodeを利用する設定(アプリ書換>codeでフォルダを開く)を有効化している場合は、ビルドは行わずに
build/以下の
.BINファイルを書き込む
画面 を開きます。
操作 説明 [ A ] メニュー選択↑ [ A ]長押し この画面を抜けて、選択画面に戻ります。 [ B ] 選択 [ B ]長押し 関連ウェブサイトをOS標準のブラウザで開きます。(プロジェクトフォルダの000desc.txtに登録されている場合) [ C ] メニュー選択↓ [ C ]長押し フォルダ(プロジェクト、関連フォルダ)を開きます。設定メニューでVS Codeで開くように設定できます。 ESCこの画面を抜けて、アプリ書換メニューに戻ります。 マウスクリック[ヘルプ] 関連ウェブサイトを開きます。 マウスクリック[フォルダ] または [VSCode] 関連フォルダを開きます。 マウスクリック [▽] または [△] 次ページ、前ページに移動します。
1.2.1.2.2.2.2.3 - TWELITE APPSビルド&書換 TWELITE APPSビルド&書換の画面の操作説明
Windows
macOS
Linux
RasPi
概要 TWENET C ライブラリによって記述された TWELITE APPS のビルドと書き換えを行うことができます。
アプリ選択画面の例
この画面では、以下のパスに配置されたプロジェクトの一覧を表示します。
{MWSTAGEインストールフォルダ}/MWSTAGE/Wks_TweApps
デフォルトでは、そのままご利用いただくことを想定した比較的大規模なプロジェクトを収録しています。
操作 一覧から書き込むプロジェクトを選択することで、ビルド~書き込みを行えます。
なお、書き込み終了後に ENTER または[ B ]ボタンを押すことで、TWELITE をリセットしてインタラクティブモード画面(もしくはターミナル画面、要設定)に遷移できます。
ビルド~書き込み画面
VSCodeを利用する設定(アプリ書換>codeでフォルダを開く)を有効化している場合は、ビルドは行わずに
build/以下の
.BINファイルを書き込む
画面 を開きます。
操作 説明 [ A ] メニュー選択↑ [ A ]長押し この画面を抜けて、選択画面に戻ります。 [ B ] 選択 [ B ]長押し 関連ウェブサイトをOS標準のブラウザで開きます。(プロジェクトフォルダの000desc.txtに登録されている場合) [ C ] メニュー選択↓ [ C ]長押し フォルダ(プロジェクト、関連フォルダ)を開きます。設定メニューでVS Codeで開くように設定できます。 ESCこの画面を抜けて、アプリ書換メニューに戻ります。 マウスクリック[ヘルプ] 関連ウェブサイトを開きます。 マウスクリック[フォルダ] または [VSCode] 関連フォルダを開きます。 マウスクリック [▽] または [△] 次ページ、前ページに移動します。
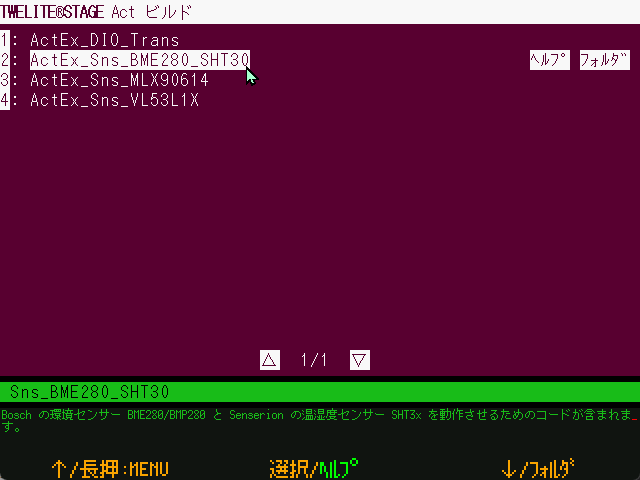
1.2.1.2.2.2.2.4 - Act_extras Act_extras画面の操作説明
Windows
macOS
Linux
RasPi
概要 MWX ライブラリによって記述されたアクト(act)のビルドと書き換えを行うことができます。
アクト選択画面の例
この画面では、以下のパスに配置されたアクトによるプロジェクトの一覧を表示します。
{MWSTAGEインストールフォルダ}/MWSTAGE/Act_extras
actビルド&書換 とは異なり、サンプルとしてご利用いただくことを想定した比較的複雑な処理を行うプロジェクトや、外部のオープンソースライブラリを利用したプロジェクトを収録しています。
操作 一覧から書き込むプロジェクトを選択することで、ビルド~書き込みを行えます。
なお、書き込み終了後に ENTER または[ B ]ボタンを押すことで、TWELITE をリセットしてインタラクティブモード画面(もしくはターミナル画面、要設定)に遷移できます。
ビルド~書き込み画面
VSCodeを利用する設定(アプリ書換>codeでフォルダを開く)を有効化している場合は、ビルドは行わずに
build/以下の
.BINファイルを書き込む
画面 を開きます。
操作 説明 [ A ] メニュー選択↑ [ A ]長押し この画面を抜けて、選択画面に戻ります。 [ B ] 選択 [ B ]長押し 関連ウェブサイトをOS標準のブラウザで開きます。(プロジェクトフォルダの000desc.txtに登録されている場合) [ C ] メニュー選択↓ [ C ]長押し フォルダ(プロジェクト、関連フォルダ)を開きます。設定メニューでVS Codeで開くように設定できます。 ESCこの画面を抜けて、アプリ書換メニューに戻ります。 マウスクリック[ヘルプ] 関連ウェブサイトを開きます。 マウスクリック[フォルダ] または [VSCode] 関連フォルダを開きます。 マウスクリック [▽] または [△] 次ページ、前ページに移動します。
1.2.1.2.2.2.2.5 - 指定 プロジェクトを指定した書き込み
Windows
macOS
Linux
フォルダまたは.BINファイルを TWELITE STAGE APP の画面にドラッグ&ドロップすることで、特定のプロジェクトを書き込むことができます。 ドロップした対象のビルドや書き込みを行うときに選択します。
.BINファイルをドロップしたときは、そのファイルが格納されるフォルダをドロップした場合と同様に、そのフォルダにあるファームウェアの一覧を表示します。
1.2.1.2.2.2.2.6 - 再書換 直前に書き込んだプロジェクトの再書き込み
Windows
macOS
Linux
RasPi
直前に書き換え・指定したプロジェクトを再選択します。
項目によって、以下のいずれかを行います。
選択したプロジェクトの再書換 直前に選択したプロジェクト一覧の再表示 1.2.1.2.2.2.2.7 - ビルド・書換画面 ビルド・書換画面の操作説明
Windows
macOS
Linux
RasPi
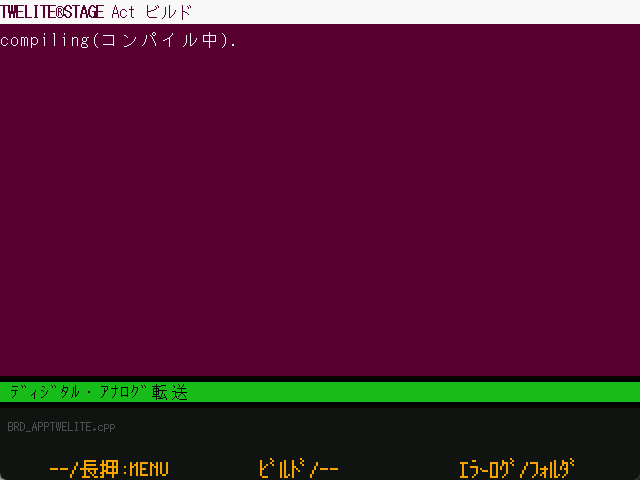
ここでは、プロジェクトのビルドや書換を行うときに表示される画面の操作説明を行います。
ビルド中 ビルド(コンパイル)中の画面です。ビルドコマンドの内容は、コンソール画面に出力されます。画面中の ... はビルドしたファイル数、下部の暗い色の表示はビルドしているファイル名です。
コンパイル中の画面の例
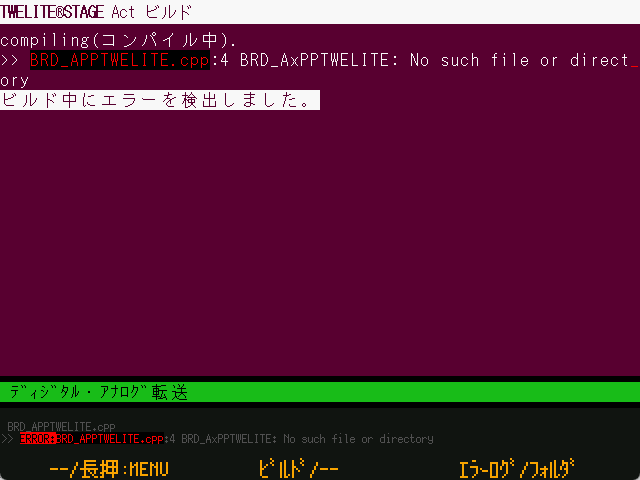
ビルドエラー ビルドエラーが発生した場合は、上記のような画面を表示します。再ビルドの実行やエラーログの表示を行うことができます。また、一定時間でタイムアウトして直前のメニューに戻ります。
エラー表示画面の例
画面上のエラーメッセージは、代表的なものだけが表示されます。ビルドが失敗したとき、エラー内容のメッセージが表示されないこともあります。
操作 説明 [ A ] 割当なし [ A ]長押し この画面を抜けて、前のメニューに戻ります。 [ B ] エラー時に再ビルドします。 [ B ]長押し 割当なし [ C ] [ C ]長押し エラーログを表示します(Windows/macOS)。保存場所は{プロジェクトフォルダ}/build/builderr.logです。 ESCこの画面を抜けて、書換メニューに戻ります。 ENTERエラー時に再ビルドします。
書換中 ビルドが成功すると、ファームウェアを書き込む画面を表示します。
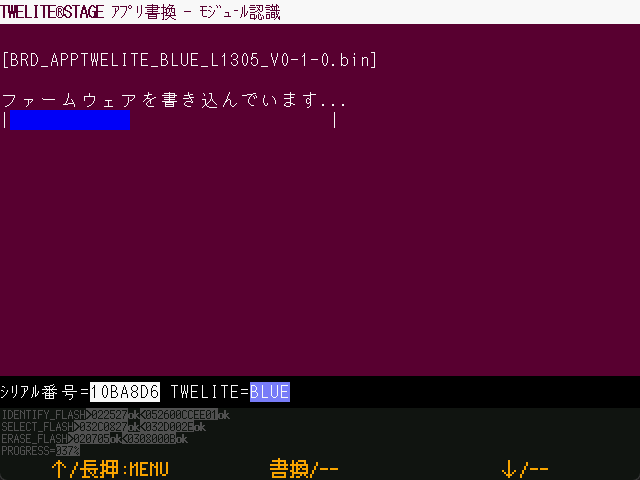
書換中画面の例
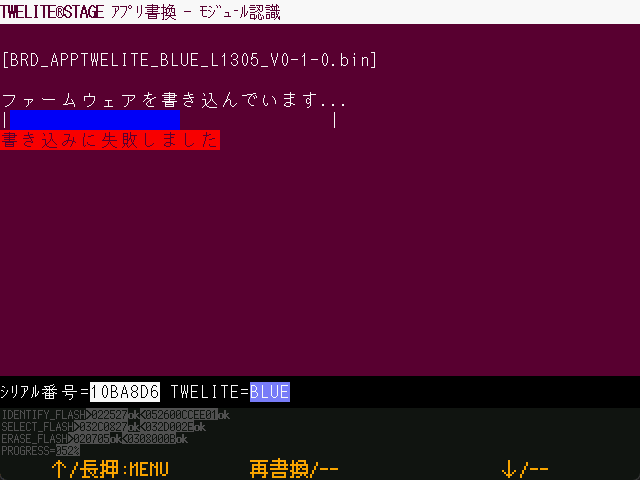
書換失敗 書換がエラーの場合は、下記のような画面を表示します。
書換失敗画面の例
操作 説明 [ A ]長押し この画面を抜けて、選択画面に戻ります。 [ B ] 再度書換を行う(直前の書き換えメニューに戻ります。 自動的にメニュー項目が選択されるため、 もう一度[ B ]を押すことで再書換できます) ESCこの画面を抜けて、書換メニューに戻ります。
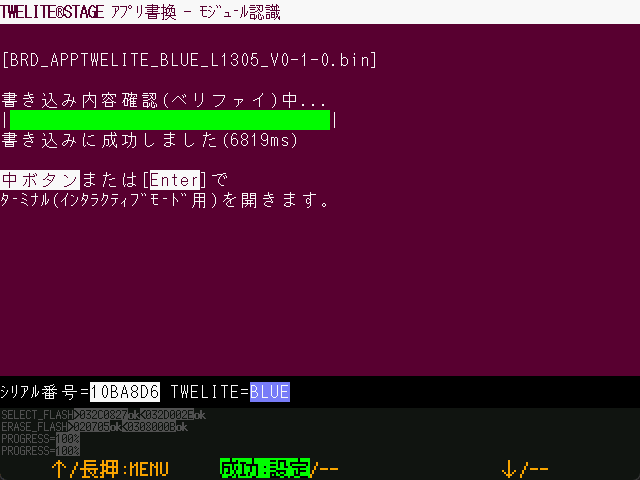
書換完了 書換が無事に成功すると、下記のような画面を表示します。
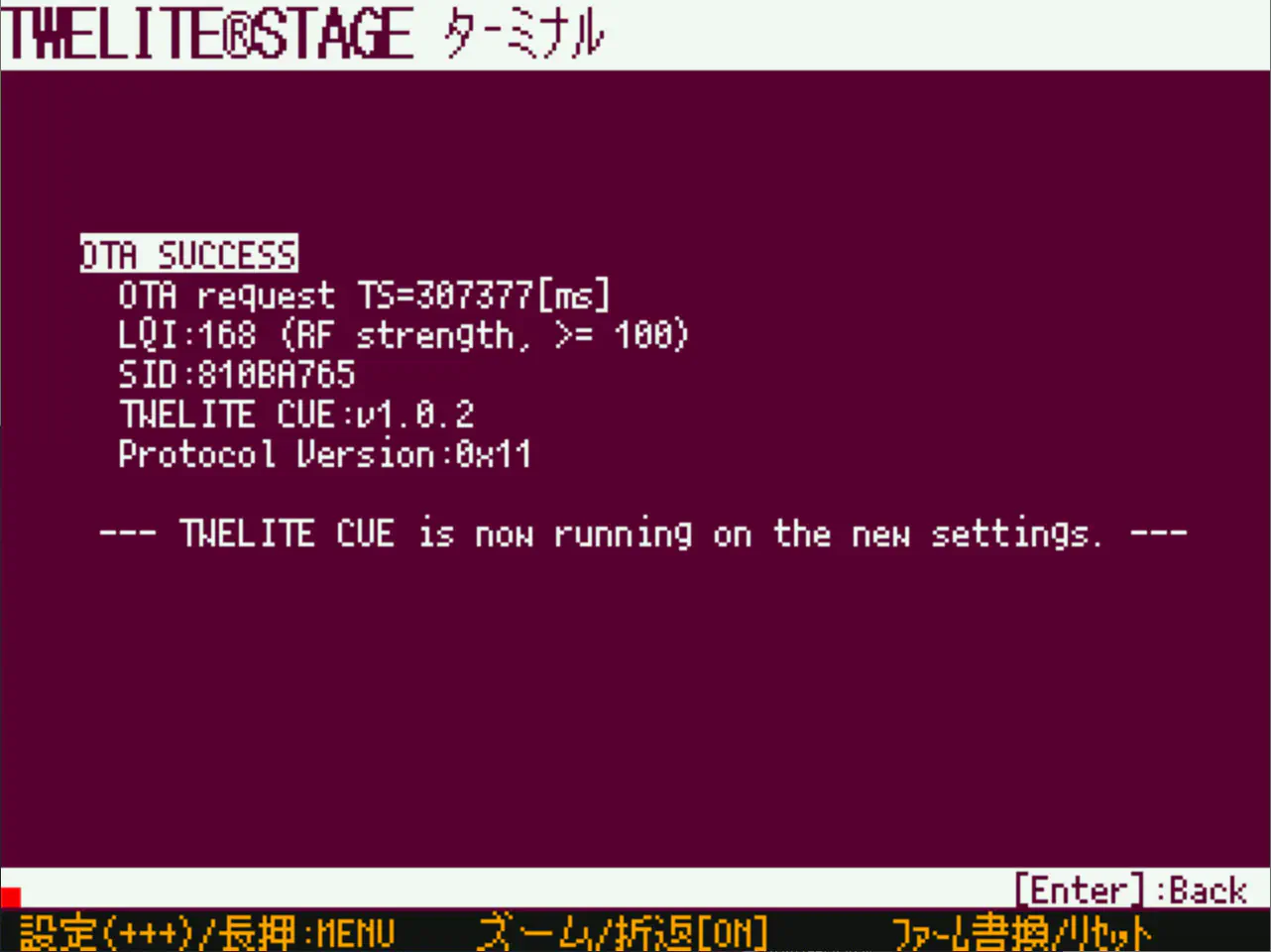
書換完了画面の例
v1.0.2以降では、ファームウェア書き換え後に、書き換え内容を読み出して確認するベリファイ処理を行います。
操作 説明 [ A ]長押し この画面を抜けて、選択画面に戻ります。 [ B ] TWELITE をリセットして、インタラクティブモード画面(または設定によりターミナル)画面に移動します。 ESCこの画面を抜けて、書換メニューに戻ります。
1.2.1.2.2.2.3 - インタラクティブモード インタラクティブモードの利用
Windows
macOS
Linux
RasPi
概要 この画面から、接続した TWELITE のインタラクティブモードを利用できます。
インタラクティブモード画面の例
この画面はターミナルとほぼ同じ振る舞いをしますが、インタラクティブモードに遷移するための操作と離脱の検出を行うなど、インタラクティブモードに固有の機能を追加しています。
接続する TWELITE には、インタラクティブモードに対応したファームウェアをあらかじめ書き込んでおく必要があります。 TWELITE の入出力を使用するため、シリアル通信に文字化けなどが発生した場合など、期待通りにインタラクティブモードへの遷移や離脱ができない場合もあります。 マウス操作には対応しておりません。キーボード(カーソル ↑ ↓ での操作は可能)操作を行ってください。
ターミナル によるインタラクティブモードへの遷移と操作もできます。
ターミナルでは、自動的にSETピンの操作を行いません。手動でSETピンをLOに設定する必要があります。 ターミナルにおいても、+ + + 入力Alt(⌘)+IやモジュールリセットAlt(⌘)+Rを行う操作を定義しています。 インタラクティブモード画面の動作フロー 以下に大まかな処理の流れを記載します。
[画面黒背景にする]
↓
[TWELITEのリセット (制御可能ならSET=LO)]
↓
<間欠動作アプリのインタラクティブモードメッセージを検出?> --YES--> [操作画面]へ
↓タイムアウト
['+' を3回入力]
↓
<通常アプリのインタラクティブモードメッセージを検出?> --YES--> [操作画面]へ
↓タイムアウト
[操作画面へ] ※ この状態はインタラクティブモードではない
[操作画面]
↓
<インタラクティブモード脱出メッセージ?> --> [終了]
↓
<画面離脱操作 [ A ] 長押しなど> --> [終了]
↓
-> <入力中判定> --NO-> [終了]
↓ ↓
[入力文字列をTWELITEへ送信]
↓
[操作画面]へ戻る
[終了]
↓
[TWELITEのリセット]
↓
[画面離脱] インタラクティブモード画面を終了し前の画面へ戻る
1.2.1.2.2.2.4 - TWELITE STAGE の設定 TWELITE STAGE APP の設定
Windows
macOS
Linux
RasPi
概要 この画面から、TWELITE STAGE APP の各種設定を行います。
設定画面の例
この画面のメニューはマウス操作できません。
また、画面の色を変更した場合に見づらくなる場合があります。
以下の解説のメニュー中には、プラットフォームによっては存在しない項目がありますが、全てを列挙して解説します。
共通メニュー以外の色設定については、解説を省略します。
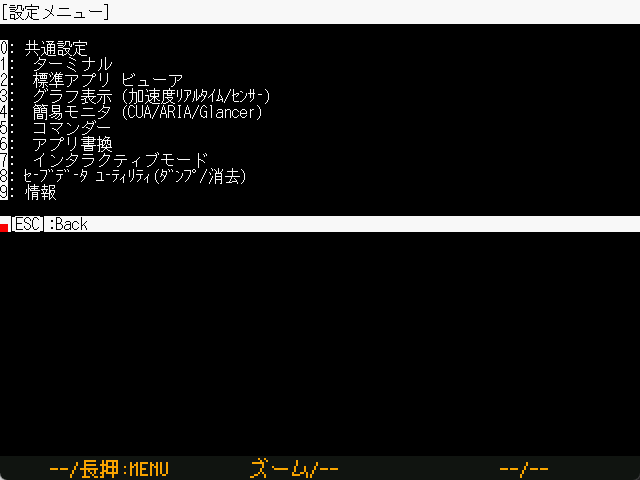
ルートメニュー
共通設定
ターミナル
標準アプリ ビューア
グラフ表示 (加速度リアルタイム/センサー)
簡易モニター (CUA/ARIA/Glancer)
グランサー(簡易モニタ)
コマンダー
アプリ書換
インタラクティブモード
セーブデータ ユーティリティ(ダンプ/消去)
情報
共通設定
a: ( 0x00) 起動アプリ指定
G: ( 0x00) 画面サイズ・描画方法
F: ( ) シリアルデバイスID
f: (0x00FFFFFF) 文字色
b: (0x005A0032) 背景色
B: ( 115200) ボーレート
設定 内容 起動アプリ指定 TWELITE STAGE始動時にビューアアプリに移動する設定です。設定値は1..{ビューアアプリメニューで列挙されている数}です。注:シリアルデバイスIDを設定しておかないと、始動時に接続するシリアルデバイス選択画面で入力待ちになります。 画面サイズ・描画方法 (M5Stack版を除く)XYの2桁の文字で指定します(X:画面サイズ Y:描画方法)。X 0:640x480 1:1280x720 2:1280x960 3:1920x1440 4:2560x1440 5:320x240Y 0:LCD風 1:CRT風 2:ぼやけ 3:ブロック シリアルデバイスID (M5Stack版を除く)設定はシリアルデバイス名または数値の1..9を指定します。注:数値の場合はデバイス列挙順になります。 文字色・背景色 文字色、背景色を指定します。共通設定の色設定値は他の画面の設定にも継承されます。他の画面で未設定の場合は共通設定の色設定が採用されます。色はRGB 24bitを16進数で指定しますが、内部的には16bit 565形式に値が丸められます。 ボーレート TWELITE 側のボーレートが 115200 ではない場合に、ターミナルなどの表示が化けないように設定します。
アプリ書換
f: (0x00FFFFFF) 文字色
b: (0x005A0032) 背景色
j: ( 0) ビルド時のmakeジョブ数
v: ( 0) codeでフォルダを開く(VSCode)
l: ( 0) LTOを行わない
n: ( 0) 書換完了後の画面
設定 内容 ビルド時のmakeジョブ数 (M5Stack版を除く)ビルドを行う際の並列ジョブ数です。適切な数を設定することでビルド時間の短縮を期待できます。規定値0は(物理プロセッサ数-1)でジョブ数を計算しています。目安としては論理プロセッサ数を上限とすると良いでしょう。 codeでフォルダを開く (VSCode) (VSCodeのインストールが必要)1を設定することでOS標準のフォルダウインドウの代わりにcodeコマンド(VSCode)でフォルダを開きます。実行ファイルTWELITE_Stage_VSCodeではデフォルトで1に設定されています。 書換完了後の画面 (M5Stack版を除く)1を設定することでインタラクティブモード画面の代わりにターミナルを開きます。2を設定することで、書換メニューに戻ります。TWELITE_Stage_VSCodeでは2に設定されています。 LTOを行わない (Windowsのみ)1を設定すると、WindowsのコンパイラでLTOを行いません。LTOは比較的小さなバイナリを生成できる一方でリンクに時間を要します。LTOを省略することでより高速なリンクが実現できます。
セーブデータユーティリティ
r: Read sector.
R: Read ALL sectors.
e: Erase sector.
E: Erase ALL sectors.
この画面は、データセーブ領域のメンテナンスを行うユーティリティです。EEPROM(64バイトを1セクタとして最大60セクタ、3840バイト)をエミュレートします。
設定 内容 rセクタを読み出します。0..59を入力すると、入力したセクタ番号のセクタの内容を表示します。 RYESを入力すると全セクタの読み出しを行いますが、末尾の部分のみを表示します。eセクタを消去(0xFF)します。0..59を入力すると、入力したセクタ番号のセクタが消去されます。 EYESを入力すると全セクタを消去します。
Windows, macOS, Linux, Raspberry Pi では、 {実行形式名}.sav(デフォルトでは TWELITE_Stage.sav ファイル)に保存されます。
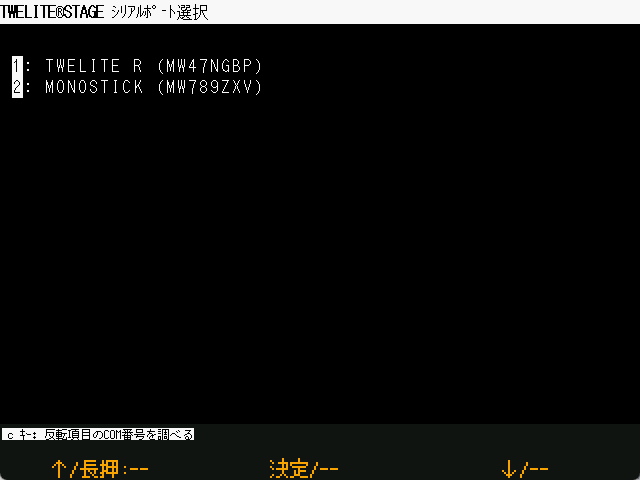
1.2.1.2.2.2.5 - シリアルポートの選択 シリアルポートの選択
Windows
macOS
Linux
RasPi
概要 この画面では、シリアルポートを再選択できます。
シリアルポート選択画面の例
この画面を使用せず、Alt(⌘)+0, Alt(⌘)+1,2,.. でシリアルポートを切り替えることもできます。
1.2.1.2.3 - ログ機能 TWELITE と PC 間のログ機能
Windows
macOS
Linux
RasPi
TWELITE と PC 間のシリアル通信のログを記録できます。
操作 記録開始 Alt(⌘)+L を押します。
ログの開始画面の例
記録終了 記録中に再度 Alt(⌘)+L キーを押します。
ログの終了画面の例
ログの記録が終了し、その時点のログファイルをOS標準の方法(Windowsはメモ帳、macOSはコンソール.app)で開きます。
Raspberry Pi では、ログファイルの保存のみ行います。自動的にログファイルを開く機能はありません。
仕様 ログの記録 TWELITE から受信した文字列は、そのまま記録されます。
TWELITE に送信した文字列は、1文字ずつ記録されます。
Windowsの場合は 「 」、 macOS / Linux / RaspBerryPi は « » で囲われます。
例えば«t»とある場合は、キーボードからtを入力したことを意味します。
ログ記録のフォルダとファイル名 {TWELITE STAGE APP の実行形式のあるフォルダ}/log にログ開始時の日時を元にしたファイル名で保存されます。
Alt(⌘)+Shift+L を押すことで、そのフォルダを開きます。
ログ出力フォルダの例
1.2.1.3 - 詳細な仕様 TWELITE STAGE APP の詳細な仕様
1.2.1.3.1 - コマンドライン引数とiniファイルによる詳細設定 コマンドライン引数とiniファイルによる TWELITE STAGE APP の詳細設定
コマンドライン引数 コマンドライン引数は、TWELITE STAGE APPのいくつかの細かい設定を行います。
コマンドライン引数 内容 -E 0 フェードアウトのようなグラフィカルな効果を無効にする。 -R {type} {type} 値でレンダリングタイプを設定します。0: デフォルト1: OpenGL2: DirectX(Windows) Metal(macOS)3: ソフトウェア -J ゲームコントローラーを有効にします。 -x {x_pos},-y {y_pos} 起動時のTWELITE STAGE Appのグラフィカルウィンドウの位置を設定します。{x_pos}と{y_pos}はウィンドウの左上のスクリーン座標です。
iniファイル iniファイルはTWELITE STAGE APPの基本的な設定(MWSDKのフォルダを参照するなど)を行うために使用されます。
iniファイル名は{TWELITE STAGE APPの実行ファイルのベース名} + .ini です。 通常は TWELITE_Stage.ini となります。
;;; MWSDKの参照を変更します。
; MWSDK=MWSDK
mwsdk=mwsdk2020_10
;;; インターフェース言語
; LANG=en
;;; ウィンドウのジオメトリ
GEOM_X=200
GEOM_Y=100
シンタックス ini ファイルはプレーンテキストファイルとして記述される。 キーと値は = で区切られた1行に格納される (例: KEY=value)。 キーと値の文字列は行頭から始まる(キーの前に空白や他の文字は許されない)。 キーと値の間にスペースを入れてはならない。 コメント行は ; または # を行頭に追加する。 設定 キー 値 MWSDK MWSDKのフォルダを変更する。デフォルトのフォルダは、TWELITE STAGE APPの実行ファイルが置かれているのと同じフォルダにある MWSDK です。古いMWSDKやカスタムMWSDKを使用する必要がある場合は、そのフォルダの名前を指定することができます。 LANG LANG=en は、ユーザーインターフェースの言語をデフォルト(日本語)から英語に変更します。この設定は、make パラメータ (TWE_LANG_PREF) に引き継がれ、TWELITE_Apps など一部のファームウェア(アプリ)のインタラクティブモードの表示言語設定に反映されます。 GEOM_X, GEOM_Y TWELITE STAGEアプリのウィンドウが表示される場所を変更する。
異なる設定の TWELITE STAGE APP を実行する 異なる設定の TWELITE STAGE APP が必要な場合は、TWELITE STAGE APPと同じフォルダに実行ファイルをコピーして、同じ名前の .ini ファイルを作成します。
例えば、英語のインターフェースを使用する場合、TWELITE_Stage.exe(注: .exe はWindowsの実行ファイルの拡張子)を TWELITE_Stage_en.exe にコピーして、 LANG=en の設定を TWELITE_Stage_en.ini に書き込むことで、英語のインターフェースを有効化した実行ファイルを作成できます。
TWELITE_Stage.exe
TWELITE_Stage.ini | 特別な設定なし
TWELITE_Stage_ja.exe | TWELITE_Stage.exe のコピー
TWELITE_Stage_en.ini | LANG=en が設定されている。
1.2.1.3.2 - 環境変数 TWELITE STAGE APP が使用する環境変数
TWELITE STAGE APP では、内部的に環境変数を設定して make などのビルドプログラムの動作を行います。事前に環境変数の設定は不要です。
内部的に設定される環境変数 環境変数 解説 MWSDK_ROOT標準では TWELITE STAGE APP の実行形式が格納されるフォルダにある MWSDK フォルダ(つまり../MWSTAGE/MWSDK)が指定されます。 MWSDK.iniが指定される場合は、指定されたフォルダ名を採用します。 MWSDK_TWENET_LIBSRCサンプルコードやTWELITE APPSのソースコードフォルダには、Microsoft社の Visual Studio Code (VS Code) 用の定義ファイルを予め作成しています。この定義ファイル中にVS Codeエディタ中でコード解釈を行う目的でライブラリソースコードの参照先を指定しますが、この環境変数を用いています。MWSDK_TWENET_LIBSRC環境変数が適切に指定されると、MWSDK以下ではないプロジェクトフォルダでもコード解釈が行われ、ライブラリ関数名の補完などが機能します。(参考 ) LANG=Cツールチェインのメッセージを規定の言語(英語)にするため、明示的に設定しています。 PATHWindowsでは、SDK添付のmsysユーティリティへのPATHを追加します。 MWSDK_MAKE_JOBSMWSDK_MAKE_DISABLE_LTOMWSDK_MAKE_LANG_PREFVS Codeの設定定義で利用します。JOBS : STAGE APPで設定された並列ビルド数を渡しますDISABLE_LTO : LTOを無効化します(
Windows
)LANG_PREF : TWELITE STAGE APP の表示言語(JP:日本語, EN:英語)が設定されます。この設定は、ビルド時の make のパラメータ (TWE_LANG_PREF)にも引き継がれます。
参考 .vscode/settings.json の設定例(抜粋)
"C_Cpp.default.includePath" : [
"${env:MWSDK_TWENET_LIBSRC}/include/**" ,
"${env:MWSDK_TWENET_LIBSRC}/src/**"
],
"C_Cpp.default.browse.path" : [
"${env:MWSDK_TWENET_LIBSRC}/include/**" ,
"${env:MWSDK_TWENET_LIBSRC}/src/**"
], "../../"で始まる定義は、TWELITE STAGEアプリからプロジェクトを開く場合は不要です。環境変数MWSDK_TWENET_LIBSRCを設定しない場合に、既定のフォルダ構成の時にソース参照先を指定しています。
1.2.1.3.3 - 000desc.txt によるプロジェクト説明の追加 000desc.txt によるプロジェクト説明の追加方法について
プロジェクトフォルダに000desc.txtを作成した場合には、TWELITE STAGE APP が、プロジェクトフォルダの一覧にその内容を表示します。
000desc.txtの表示例
ファイルは UTF-8 形式のプレーンテキストで記述します。書式は以下の2種類があります。
書式1
スイッチを押した時にLEDを点灯
act4はTWELITE DIPに接続されたスイッチを押した時にLEDを点灯させるactを動作させます。
https://mono-wireless.com/jp/products/act/index.html 1行目はタイトル行です。 2行目以降は詳細の記述です。 最終行が http で始まる場合は、ウェブサイトへのリンクになります。 書式2
[JAPANESE]
TITLE = actのテンプレート
DESC = 中身が何もない setup(), loop() のみのファイルです。
新しく act を記述するのに利用してください。
URL = jp/MWX/content/Act_samples/README.html
[ENGLISH]
TITLE = act empty template
DESC = This act file only contains empty setup() and loop(),
which is intended to write a new act.
URL = en/MWX/content/Act_samples/README.html iniファイルのような書式です。行頭から始まる項目名と=文字までを項目の定義として=以降が項目の内容です。
項目定義 詳細 [JAPANESE], [ENGLISH]ブロックの区切り TITLE=タイトル行 DESC=詳細の記述。改行を含めて複数行にすることもできます。 URL=ウェブサイトまたはファイルへのリンク
URL 指定について URL= 詳細 https:, http: で始まるそのアドレスを開きます それ以外 {MWSDK_ROOT}/docs/ を起点とした相対フォルダを指定します。a/b/c.html とした場合は {MWSDK_ROOT}/docs/a/b/c.html に変換されます。
1.2.1.4 - ライセンス ライセンスについて
モノワイヤレス 株式会社が配布するTWELITE_Stageの実行形式は MW-SLA-1J,1E が適用されます。
ソースコードについてはMW-OSSLA-1J,1E が適用されます。概要はリンク先を参照ください。
お客様がソースコードからビルドした場合は、非商用目的でより制限の緩和されたMW-OSSLA-1J,1Eによる運用が可能です。
一部の配布パッケージ(2020/10/9現在では M5Stack用 0.8.9a パッケージのみ)ではMW-SLA-1J,1E と MW-OSSLA-1J,1E とのデュアルライセンスを適用しているものもあります。パッケージ内のライセンス記述を確認してください。
商用利用ではMW-SLA-1J,1Eを選択いただくことになりますのでご注意ください。
利用したオープンソース成果物 高品質なソースコードを提供いただいたオープンソースプロジェクトに感謝いたします。
名前 記述 SDL2 Simple DirectMedia Layer Copyright (C) 1997-2020 Sam Lantinga getopt Copyright (c) 1987, 1993, 1994The Regents of the University of California. All rights reserved. regex regex - Regular expression pattern matching and replacementBy: Ozan S. Yigit (oz) Dept. of Computer Science York University printf Copyright (c) 2014 Marco Paland 東雲フォント 2001 The Electronic Font Open Laboratory http://openlab.ring.gr.jp/efont/ M+ BITMAP FONTS Copyright 2002-2005 COZ coz@users.sourceforge.jp SQLiteC++ Copyright (c) 2012-2021 Sebastien Rombauts (sebastien.rombauts@gmail.com ) sqlite3 All of the code and documentation in SQLite has been dedicated to the public domain by the authors.
1.2.1.5 - 改訂履歴 TWELITE STAGE APPの改訂履歴
ソースコードの変更履歴は https://github.com/monowireless/mwm5 を参照してください。
プラットフォームによっては、配布中の最新バージョンと改訂履歴の最新バージョンが一致しない場合があります。
プラットフォームによっては、配布中の最新バージョンと改訂履歴の最新バージョンが一致しない場合があります。 上記サイトへの公開コードは最新バージョンでない場合があります。 2.4.4 MWSTAGE2025_08収録版 メジャーバージョンアップ
TWELITE STICK に対応
シリアルポート関連の機能強化
ALT+Bによりボーレートの切り替えを追加タイトルバーに接続状況を表示 Makefileのエラーメッセージに対応
$(error <MWERRM>...</MWERRM>)という書式で出力したエラーの...部を抽出エラーメッセージは、非対応アーキテクチャ(GOLDのみ、または、BLUE/REDのみ)のプロジェクトをビルドしようとしたときに出力する目的で新設 インタラクティブモードの言語設定に対応
2.4.3 直下に build が無く、サブフォルダにある複数構成タイプのプロジェクトの場合、サブフォルダのリスティングを build/ フォルダがあるものに限定し、不要なフォルダを表示しないようにした。 ビルドエラー時にエラーメッセージが長い場合にクラッシュしていた問題を修正した。 BLUE/RED/GOLD 判定では、シリアルプロトコルを試して応答があるかどうかで、判定していたが、最初に GOLD を判定するように変更した。(GOLD 向けのSDK) 2.4.2 SETピン(MONOSTICKはCTSピン)によるインタラクティブモード遷移制御を追加。TWELITE_Apps での制御は以下の通り。おおよそ100ms程度未満であれば通常起動(ノイズによる偶発的なインタラクティブモード遷移の抑制) 上記以上であれば起動時にインタラクティブモードに遷移する おおよそ3秒以上であれば、始動時にEEPROMを全削除する 各アプリに対しても起動パラメータを与え、インタラクティブモードへの遷移を伝える。各アプリは、このパラメータを受けた場合は、原則として、アプリ向けの各種初期化を省略 割り込みハンドラ等の処理も省略 115200 8N1 UART0 にてインタラクティブモードを自動起動 インタラクティブモードは + + + による終了を抑制 上記仕様に合わせ STAGE アプリでは以下の様に動作する。通常のインタラクティブモード遷移では、SETピンを 300msec 程度保持するインタラクティブモード遷移の説明画面で [ C ] 長押の場合は、SETピンを 5秒程度保持する タイムアウト以内に Entering Interactive ... の始動メッセージが来ない場合は + + + を試みる(従前仕様) その他、コードクリーンアップ 2.4.1 TWELITE GOLD 対応(初期実装)起動時に GOLD での制御コマンド応答がある場合は GOLD として認識し、失敗すれば BLUE/RED 系列の制御コマンドを試みる 1.3.8 MWSTAGE2022_08収録版 メジャーバージョンアップ。
内部描画解像度を320x240から640x480ピクセルに変更 加速度センサーのリアルタイムグラフの追加 センサーデータの保存とグラフ表示を行うセンサーグラフを追加 英語表示に対応 主要マニュアルをローカルhtmlファイルに変更 1.0.8 MWSTAGE2021_09収録版 [ A ] [ B ] [ C ]ボタンで、ポインタから外れたボタンが残ってしまう場合があった STAGE APPでEnter入力の際にTWELITEに対してCRLFを送信するようにした MacのFTDIライブラリを更新しApple Silicon(M1)でもシリアル仲介プログラムを利用しなくても、動作できるようになった Windowsでmsysツール群のPATHを内部設定し、期待しないmakeが呼び出されないようにした TWELITE未接続でも書き込み画面に移動できるようにした(B,Rキーを入力し、対象のTWELITEモデルを指定する) VSCodeを利用する設定を行った場合は、actやTweAppsを選択したときに、ビルドを実行せず、build/以下の.binファイルを書き込む画面を開くようにした。(ビルドはVSCodeから実施します) いくつかの環境変数を内部的に設定し、TWELITE STAGEから起動したVSCodeにこれらを参照させることで、VSCodeから適切なビルドを実行、VSCodeのコード解釈に対して適切なライブラリソースを参照できるようにした MWSDKフォルダ以下にサンプルコードが格納されているが、ビルド対象のフォルダをドロップすることで、MWSDK以外のフォルダでもビルドや書き込み作業をできるようにした(フォルダ名に空白や日本語文字などが含まれてはいけません) 始動時のコンソール画面に、内部のフォルダ設定や環境変数の設定内容を表示するようにした 終了時は1秒待ってからSTAGE APPを終了するようにした 1.0.7pre2 Raspberry Pi の対応を強化 (1.0.7pre2)serial0 の対応(TWELITE STAGE HAT) Zero 向けビルドを追加(対応ライブラリでビルド&描画フェード機能を無効化) X11 デスクトップ向けビルドを追加 一般のFTDIデバイス(FT232,FT230)でも利用できるようにした。ファームウェア書き込みモードは手動で行う必要があります Windowsで、シリアルポート選択画面でcキーを押すことでWindowsで割り当てられているCOMポートを表示する機能を追加した ボーレートを115200bpsから変更できるようにした 描画フェード機能を無効にするコマンドラインオプション(-E 0)を追加。 1.0.3 MWSTAGE2020_12収録版 TWELITE CUE対応(パーサー・CUEビューア) 書換メニューで、書き込み時にベリファイ(比較)を行うようにした。 Apple Silicon暫定対応(TWELITE_Stage.command はユニバーサルアプリ、シリアル処理用の外部コマンドsersrv_ftdi.command、Toolsは Rosetta2 で動作可能な intel バイナリを再ビルド、シリアル通信は外部コマンド経由のため遅くなります) フォルダ構成で MWSTAGE/MWSDK/Tools を MWSTAGE/Toolsに移動した。(MWSDKをMWSDK_COMMONレポジトリをそのまま利用できるようにするため) TWELITE_Stage.ini (起動ファイル名から拡張子を取り除き .ini を付加) を、起動時に読み込みMWSDKフォルダを選択できるようにした。(古い版のライブラリ一式を簡単に切り替えられるようにした) 画面描画用のSDL2ライブラリを 2.0.12 に変更した (Windows, MacOS, RaspberryPi)。 Windows では static ビルドとして DLL ファイル不要とした。 make -j による並列ビルド数を(物理CPU数 - 1)とした。 書換メニューのいくつかの場所で、シリアルポートの再オープンを明示的に行うようにした。デバイスの抜き差しを行ったときなどにUSB接続が切断した場合などに、復帰しやすいようにした。 Alt(Cmd)+Shift+m, t で mwx, twesettings を開くとき TWENET/usever.mk 記載のフォルダを 開くようにした。 [Raspberry Pi] 初回起動時に /dev/serial0 での書込メニュー遷移が失敗する問題を修正。 既知の問題 起動時にAlt(Cmd)押し下げ時のヘルプメッセージが出現しない場合がある。Alt(Cmd)+0を入力することで表示されます。 書換メニューでファイル名が長すぎる場合に、行の行事が乱れる場合がある。 Apple Siliconでの動作については十分な検証を行っていません。 0.9.11 MWSTAGE2020_10, Raspberry Pi 版 (暫定版) (※包括的な検証を実施しないバージョンです)
Raspberry Pi での動作 その他、機能調整 0.9.9 - MWSTAGE2020_10収録版 最上位メニューにも [ウェブ] ボタンを追加し、関連リンクをブラウザで開けるようにした。 Linux版のフォルダ、ウェブ、VS Code で開く機能を実装した。 TWELITE が頻繁に UART 出力している場合に、書き込みメニューへ遷移しづらいことがあった 0.9.8a https://github.com/monowireless/TWELITE_STAGE_Bin_M5Stack/releases/tag/0.9.8a
M5Stack版で MW-SLA-1J,E / MW-OSSLA-1J,E のデュアルライセンスとし、readme-j.txt を更新した。
0.9.8 ビューア一覧表示に[ウェブ]ボタンを追加し、関連サイトを開く機能を追加など。
改定内容 ビューア>コマンダーの追加標準アプリ 0x80 コマンド NOTICE PALのLED制御 (App_Wingsにコマンドを送付) ビューア>PALビューアのNOTICE PAL対応。 Act_extrasのメニューを追加Act_samplesより高度なもの 外部のオープンソースライブラリ(センサー手続きなど)を利用したもの マウスによる操作を拡大 (リスト、ボタン、タブ)マウス移動でフォーカス、左クリックで確定、右クリックは[ESC]キー入力 画面表示負荷の低減アプリケーションがバックグラウンドの時はスクリーンセーバーを無効にした アプリケーションがバックグラウンドの時は、描画回数を減らして CPU 負荷を減らした ビルドプロジェクト(act, TWE_Apps, Act_extras)の一覧の機能強化項目選択時に下部に概要を表示 (000desc.txtを読み込む。TWE_Descクラスにより処理) プロジェクトフォルダを開く(またはVSCodeで開く)機能 関連ウェブサイトを開く機能 ALt+Shift+m mwxライブラリ、Alt+Shift+t twesettingsライブラリを開く機能 ビルドメニュー中で選択中のフォルダやビルドエラーファイルを開けるようにした。 ログ(シリアルポート入出力)機能の追加(Alt/Cmd+L)でログの開始・終了 ログファイルを {TWELITE_Stage 実行形式のあるフォルダ}/log に格納 ファイル名は twestage_{日付-時刻}.log Shift+Alt/Cmd+L でログファイルフォルダを開く その他、変更・修正などシリアル(FTDI)デバイス名、IDの表示方法を変更 App_UARTでインタラクティブモードに遷移しなかった問題を修正 フォルダドロップ時の挙動を変更した (これまではバイナリ書き込みになる場合があったが、メニュー遷移とした) ターミナル長押し時[C]でリセットに加え、画面クリアするようにした。 既知の問題 M5Stack で設定を保存するときにハングアップし、設定内容が初期化される場合があります。 0.8.9 2020_05 リリース版
ウインドウアイコンの追加 BINファイル一覧画面での最大リスト数の制約を緩和 (win/linux/mac) Glancerビューアの追加 解説文面等の調整 コンソール画面の描画の調整 ファーム書き込み後の移動先画面(インタラクティブモードかターミナルか)の設定が動作していなかった Alt(or Cmd)+W の割り当てを変更 その他不具合の修正 0.8.6 Linux 版リリース初版
0.8.5 リリース初版
1.3 - TWELITE APPS 信号伝達やシリアル通信など、すぐに使える専用ファームウェア
TWELITE APPS - トワイライトアプリはTWELITEのソフトウエア開発を行わずにそのまま使えるレディメイドソフトウエアです。
インタラクティブモードとは インタラクティブモードは、 TWELITE APPS の詳細設定を行うモードです。
複数のグループで通信したい場合や、通信エラーを減らしたい場合等に必要な設定を行うことができます。
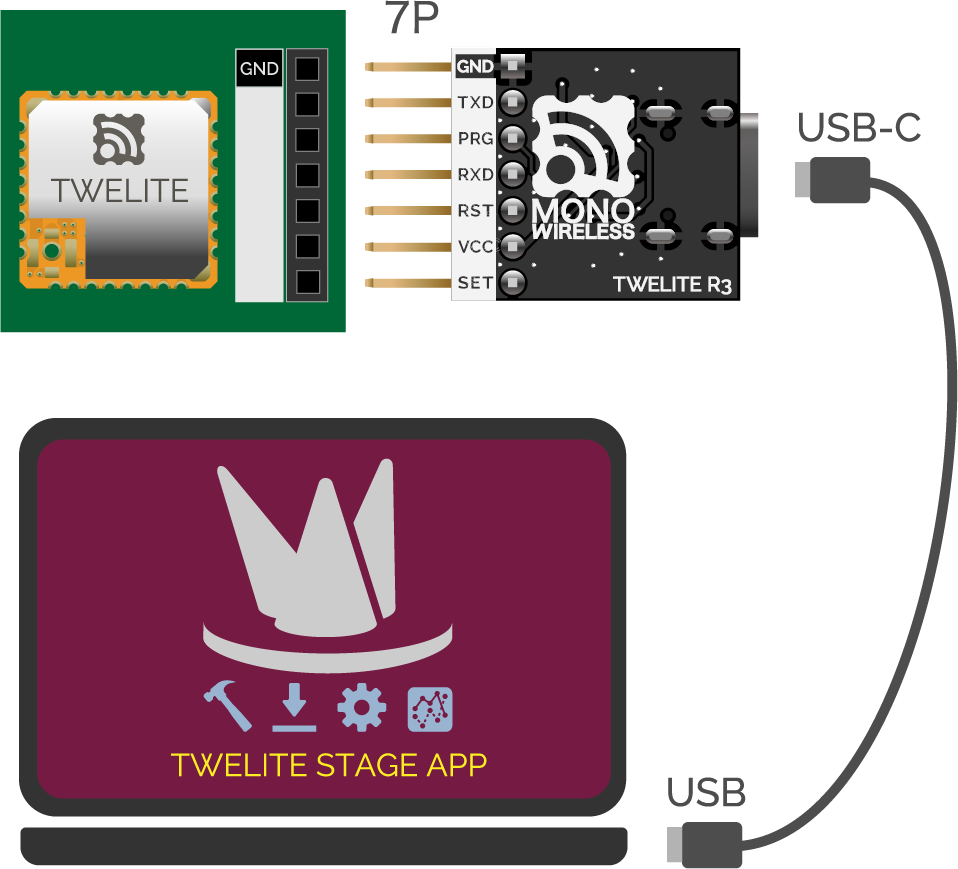
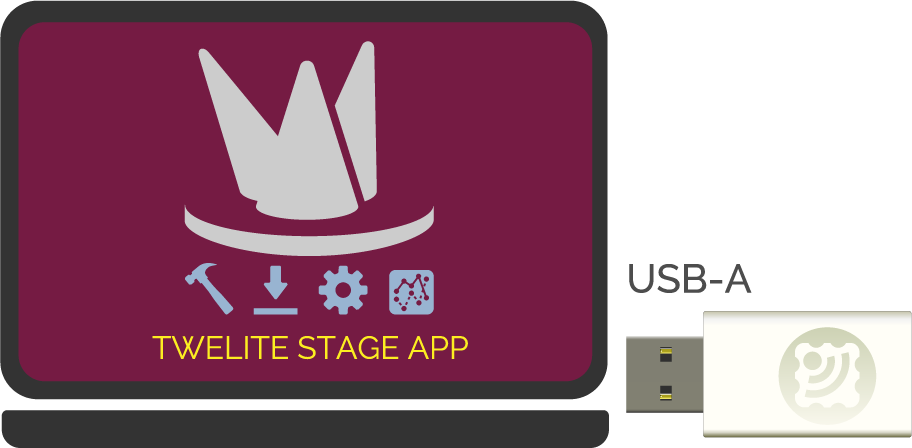
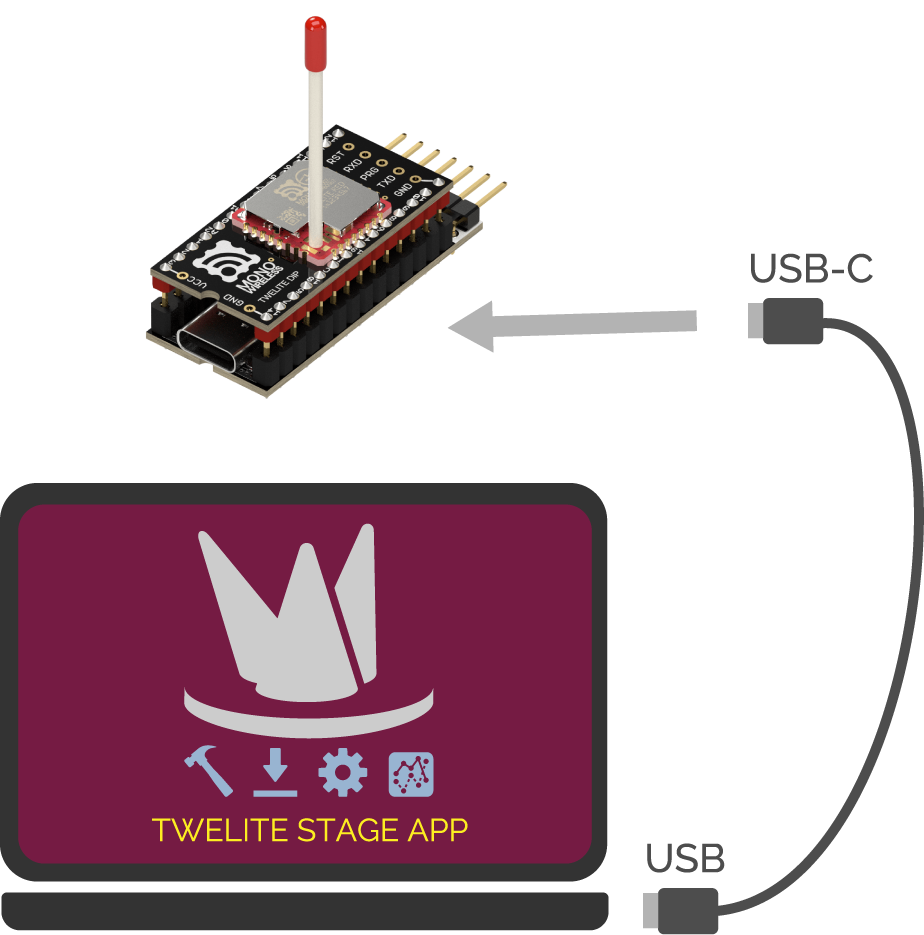
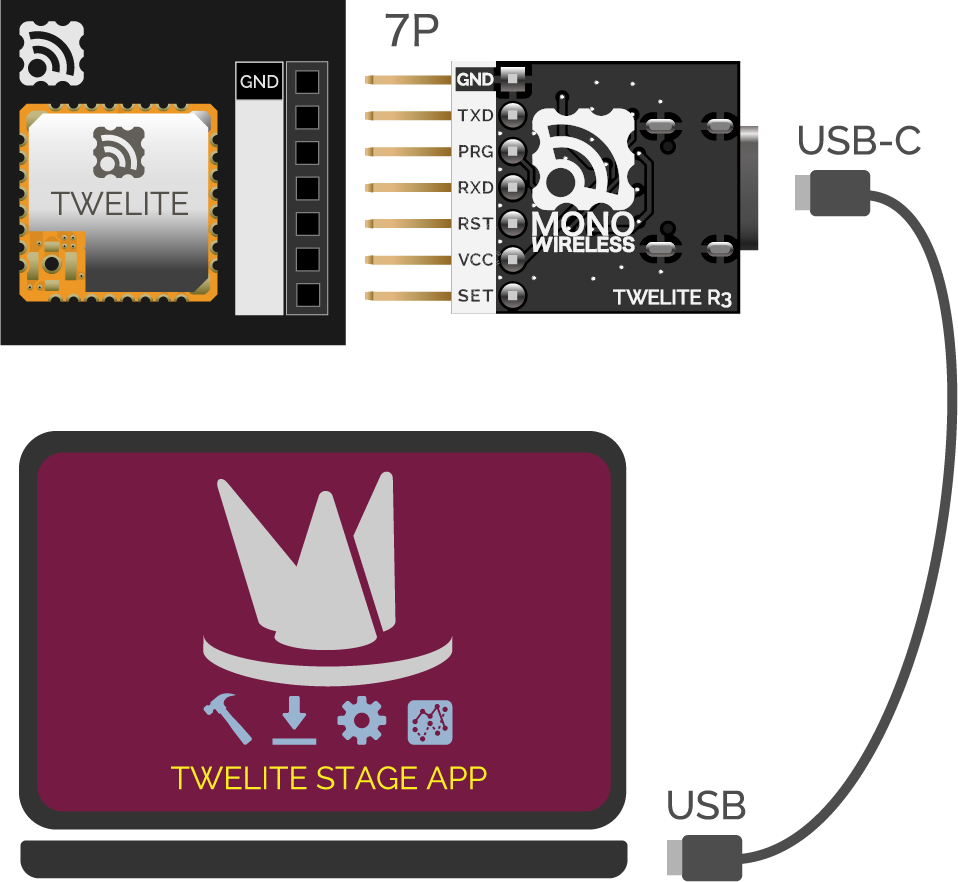
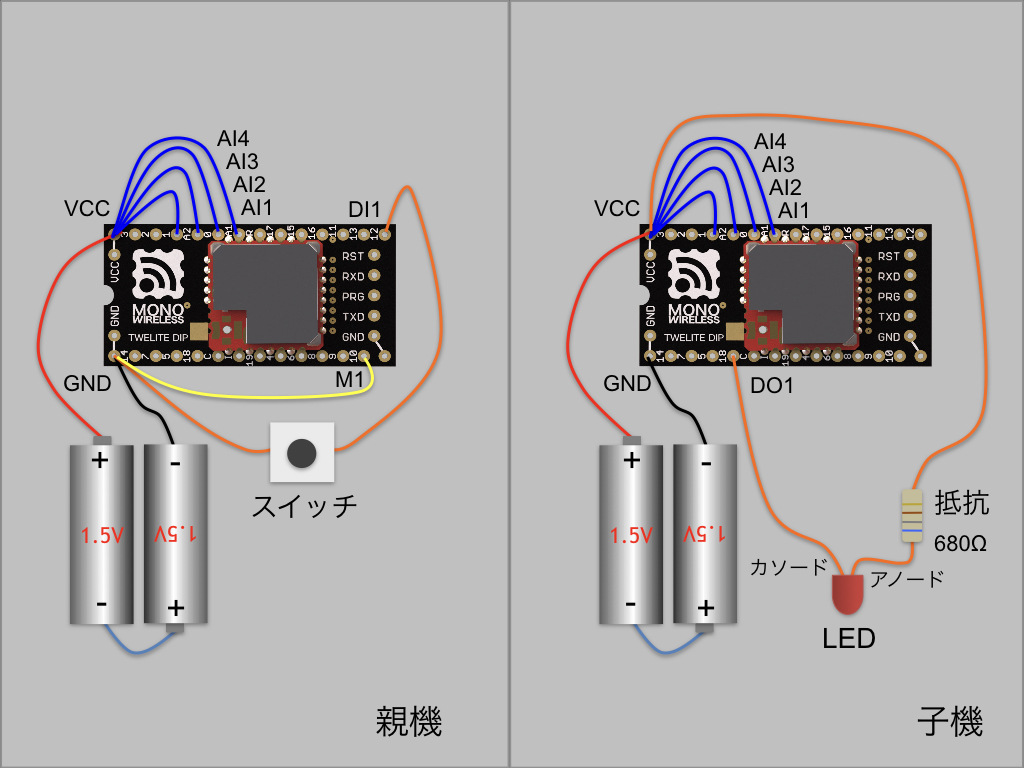
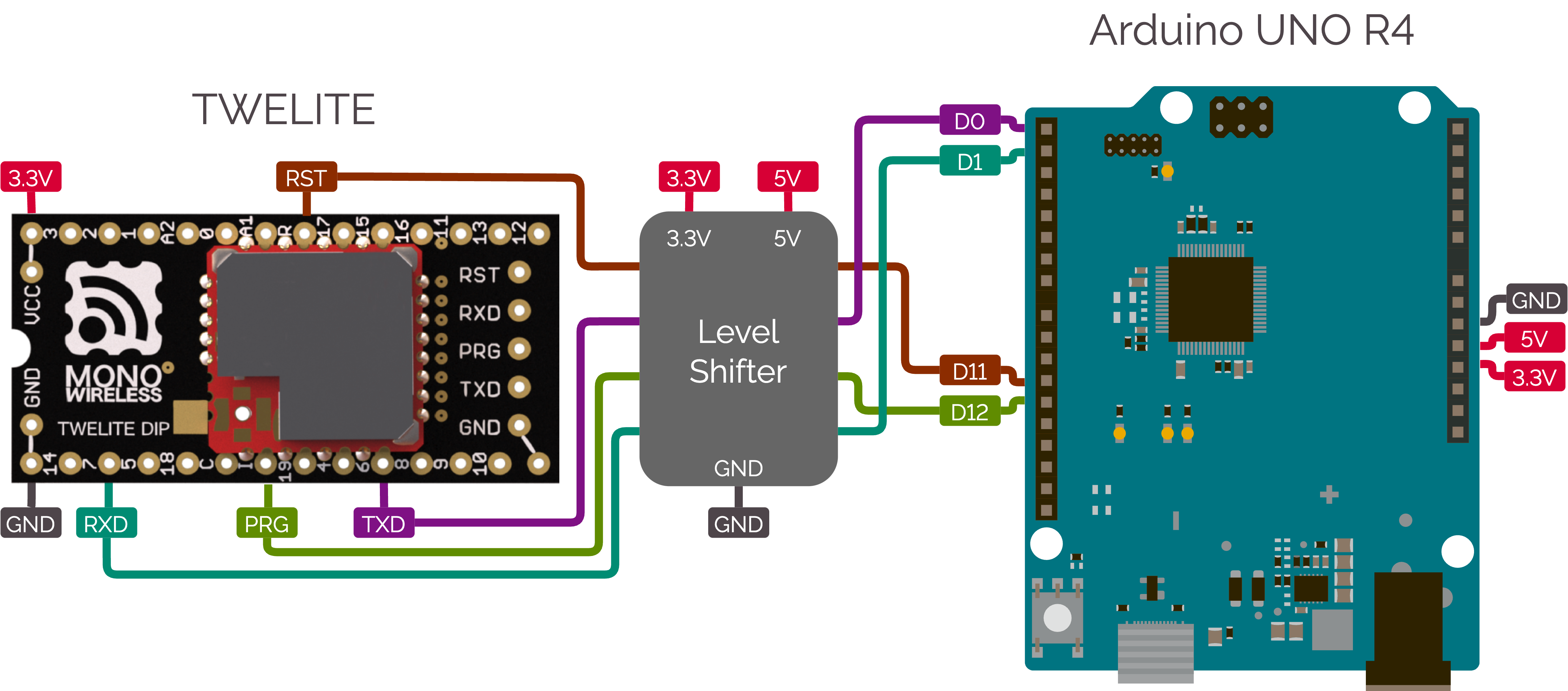
PC との接続 TWELITE の場合 MONOSTICK の場合 親基板へ用意した7Pインターフェイスに TWELITE R シリーズを装着し、USBケーブルを使ってパソコンと接続してください。 MONOSTICK をパソコンの USB ポートに接続してください。 TWELITE R シリーズ は必要ありません。 TWELITE (SMD) と PC の接続
MONOSTICK と PC の接続
TWELITE DIP (BLUE/RED) の場合 その他の場合 TWELITE R シリーズ へ装着し、USBケーブルを使ってパソコンと接続してください。7Pインターフェイスを備える TWELITE シリーズには TWELITE R シリーズ を装着し、USBケーブルを使ってパソコンと接続してください。 TWELITE DIP (BLUE/RED) と PC の接続
その他の TWELITE シリーズ と PC の接続
インタラクティブモードの切り替え
TWELITE がスリープしている間はインタラクティブモードを使用できません。
TWELITE STAGE を使用する場合 TWELITE STAGE APP は TWELITE のファームウェアの書き込みと設定、および受信したデータの表示機能を統合した開発ツールです。
TWELITE STAGE APP を起動する TWELITE STAGE APP のメインメニュー
TWELITE STAGE APP のメニューから「インタラクティブモード」を選択 する ターミナルソフトを使用する場合 一般のターミナルソフトを使用することもできます。
パソコン側でターミナルソフトを起動する(通信条件:115200bps/8-N-1) TWELITEをリセットする。 パソコンのキーボードの+をゆっくり(0.2~1秒間隔)で3回押下する。上手くいかない場合は、繰り返し + を入力する。 インタラクティブモードを終了するには、もう一度+を3回押下してください。
テンキーから+キーを入力すると失敗する場合があります。本体の+を使用してください。
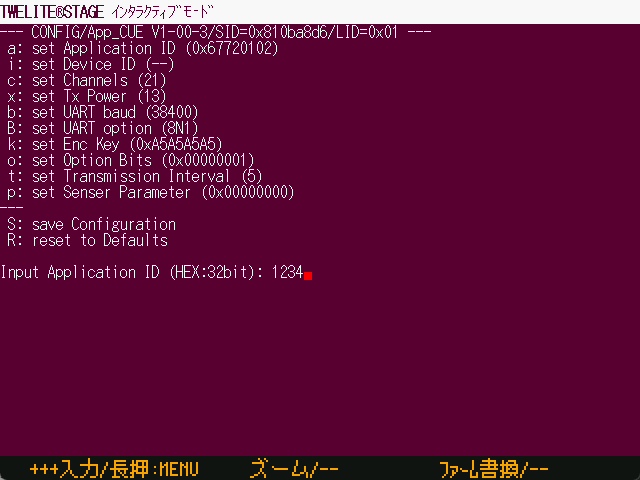
インタラクティブモードの操作 インタラクティブモードでは、以下のような画面を表示します。
--- CONFIG/TWELITE APP V1-00-2/SID=0x81000038/LID=0x78 ---
a: set Application ID (0x67720102)
i: set Device ID (--)
c: set Channels (18)
t: set mode4 sleep dur (1000ms)
y: set mode7 sleep dur (10s)
f: set mode3 fps (32)
---
S: save Configuration
R: reset to Defaults 表示内容は、ファームウェアの種類やバージョンによって異なります。
エスケープシーケンスに対応しないターミナルソフトウェアでは、表示が崩れる場合があります。
手順
値を選択:先頭のアルファベットを押下 値を指定:値を入力 値を確定:Enterキーを押下 値を保存:S(大文字)を押下 値を適用:TWELITE を再起動 ()内の値は設定値です。
R(大文字)を押下することで、初期値へリセットできます(Sで適用)。
操作例 アプリケーションIDを 0xBEEFCAFE へ設定する場合の入力は次のようになります。
Input Application ID (HEX:32bit): BEEFCAFE
設定を適用するには、Sコマンドで内容を保存したのち、本体を再起動してください。
TWELITE APPS に共通する設定 周波数チャネル、アプリケーションID、デバイスID、再送回数と送信出力の設定は、TWELITE APPS に共通しています。
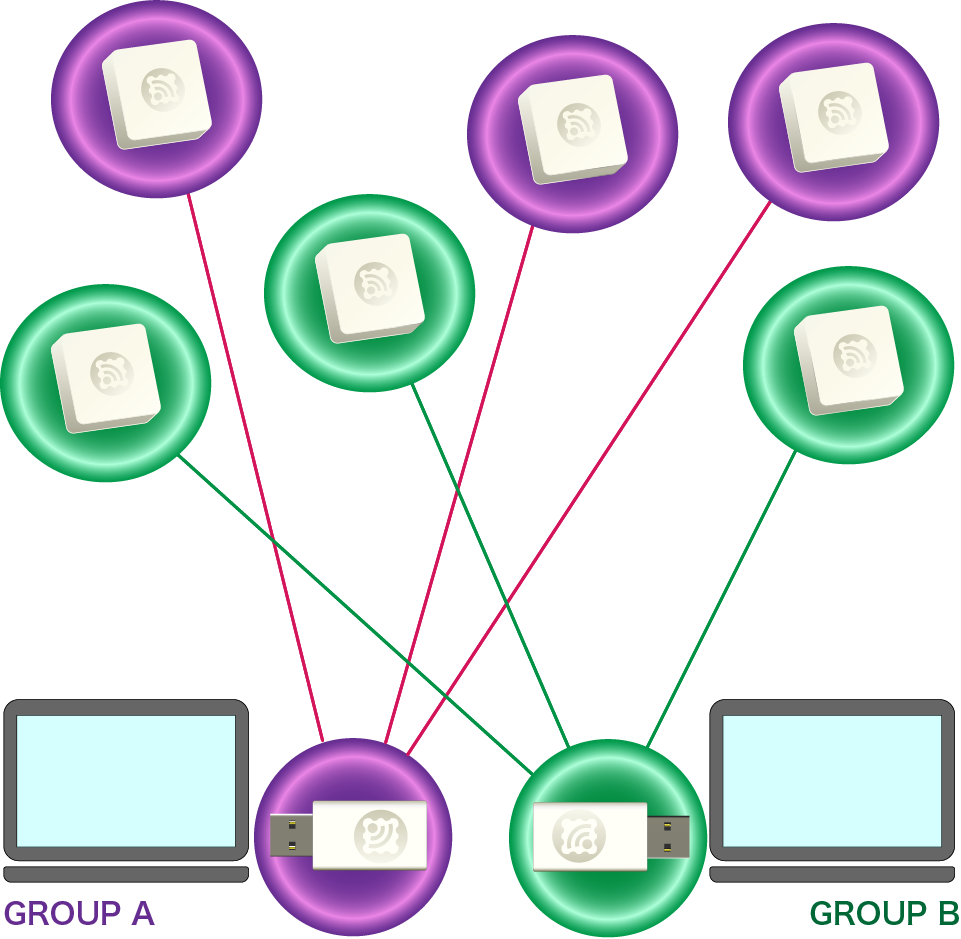
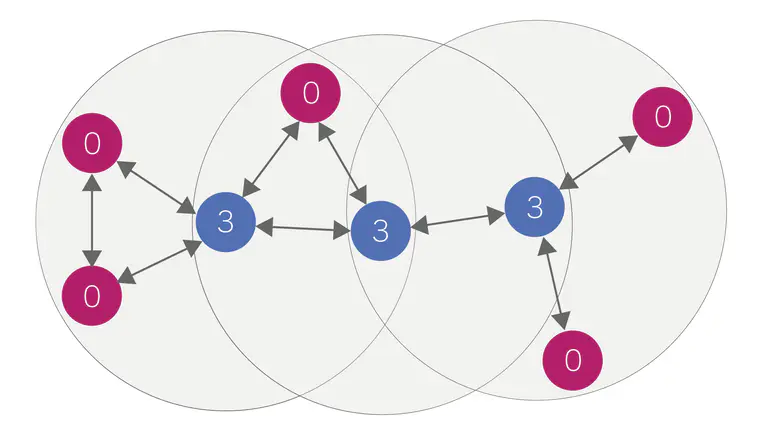
アプリケーションIDと周波数チャネル グループ化のイメージ
同一のアプリケーションIDと周波数チャネルをもつ端末でないと通信できません。
a:アプリケーションID通信を行うすべての端末へ同一の値を設定すると、論理的にネットワークを分離 できます。
TWELITE は、自身と異なるアプリケーションIDをもつ端末から受信したパケットを破棄します。したがって、同一の周波数チャネル内へ複数のグループを設けることができます。
アプリケーションIDが同一であっても、周波数チャネルが同一であった場合はパケットの干渉を避けることはできません。可能な限り周波数チャネルを分けるようにしてください。
グループ数が16以下の場合は、周波数チャネルとアプリケーションIDの双方をグループごとに分けることを推奨いたします。
上位または下位の2バイトに0またはFが連続する値は設定できません(0xFFFF????/0x0000????/0x????FFFF/0x????0000)。
0x80000001 以上の値を設定する場合は、必ずお客さまのお手元にある TWELITE へ刻印されたシリアル番号を使用してください。
皆さんがこのルールを守る限り、誰もがユニークなアプリケーションIDを得ることができます。
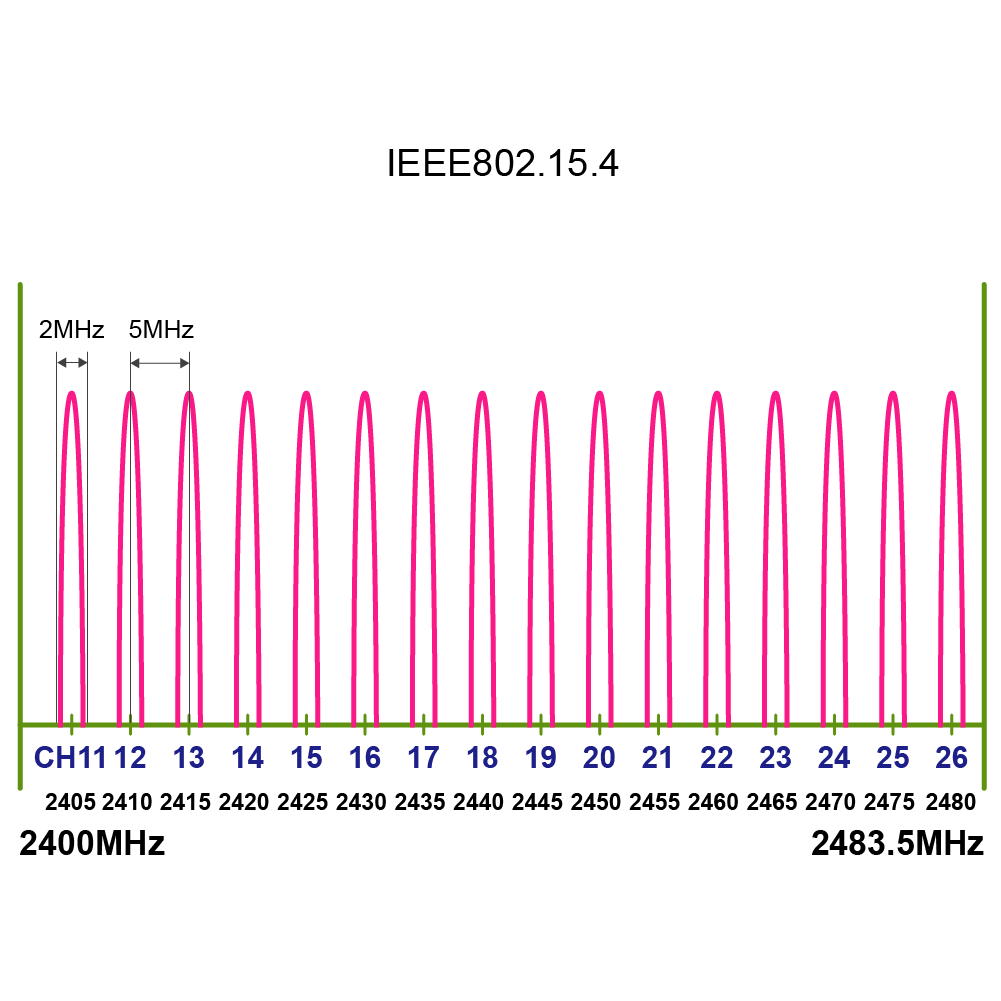
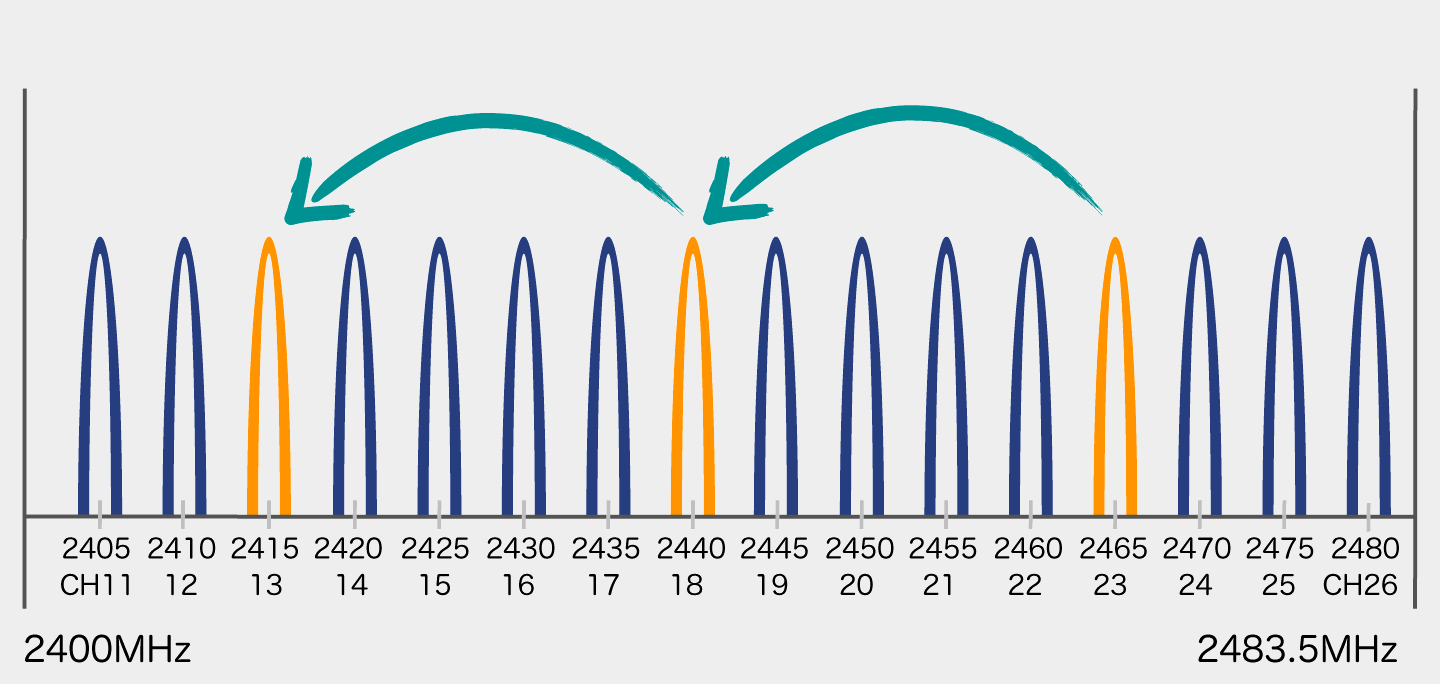
c:周波数チャネル通信を行うすべての端末へ同一の値を設定すると、物理的にネットワークを分離 できます。
TWELITE は IEEE802.15.4 規格へ準拠しており、2.4GHz帯を16チャネルに分割して使用します。
周波数チャネルの一覧
周波数チャネルを変更する場合は、c(小文字)を押下してください。
チャネルアジリティーの使用(通常は非推奨) 動作イメージ
カンマ区切りで複数のチャネルを指定することで、チャネルアジリティを有効化できます。
チャネルアジリティは、複数の周波数チャネルを一定の間隔で切り替えながら通信することにより、劣悪な通信環境における通信の成功率を改善する仕組みです。
同時に3チャネルまで指定できます。指定されたチャネルを一定の間隔で順番に切り替えて送信します。受信側においても、チャネルを一定の間隔で順番に切り替えて受信します。
なお、チャネルの切り替え中は受信できません。通常の通信環境では、1チャネルを指定するよりも通信の信頼性は低下します 。子機の送信回数を増やす必要があることから、電池消耗などの面では無駄の多い方式です。しかし、特定チャネルが全く通信不可能になるといった状況に対応できる利点を重視する場合 に利用してください。通常は、電波障害の少ないチャネルを事前に特定し、単一チャネルで利用することを推奨します。
各 TWELITE APPS の初期値 TWELITE APPS アプリケーションID 周波数チャネル 超簡単!標準アプリ(App_Twelite) 0x6772010218リモコンアプリ(App_IO) 0x6772010716シリアル通信アプリ(App_Uart) 0x6772010318無線タグアプリ(App_Tag) 0x6772630515パルアプリ(App_PAL) 0x6772630515キューアプリ(App_CUE) 0x6772010218アリアアプリ(App_ARIA) 0x6772010218親機・中継機アプリ(App_Wings) 0x6772010218
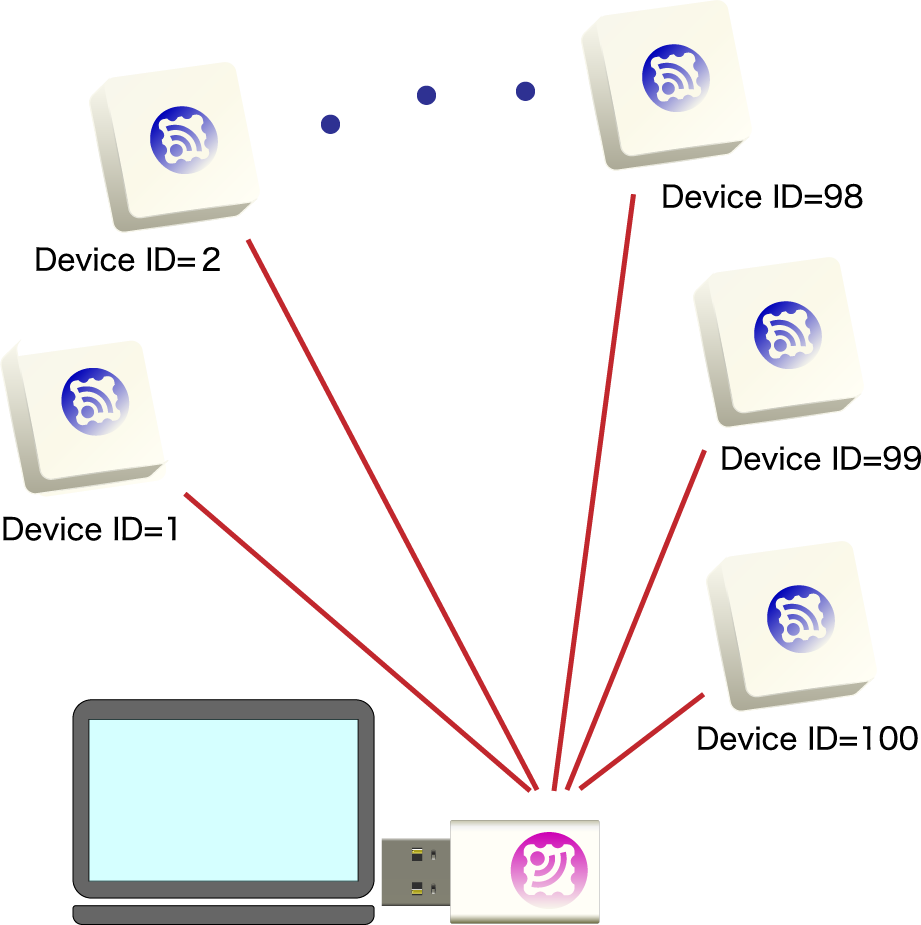
i:論理デバイスID論理デバイス ID は各端末を識別するために使用します。各端末に論理的なIDを割り振ることができます。
論理デバイスIDを付与するイメージ
1つの親機に対して複数の子機を使用する場合は、各子機へ異なる ID(1~100)を付与してください。
TWELITE BLUE/RED シリーズにおいて、TWELITE STAGE 202508 の日本語インタラクティブモード対応版(*J がつくバイナリ、GOLD版除く)では、論理デバイスIDの値を変更できない場合がある不具合が報告されています。
原因は調査中です。*J が付かない英語版をご利用ください。
x:送信出力と再送回数送信出力を弱めることで電波の有効伝達範囲を狭くすることができます。ただし消費電力は変わりませんから、通常は最大出力でお使いください。
出力を弱めてしまうと、届いてほしいときに届かないことがあります。
出力を弱めることで到達範囲を狭くしなくてはならないとき、多くの場合はシステムの設計に問題があるといえます。周波数チャネルとアプリケーションIDにより、ネットワークを適切に分離してください。
再送回数は、1回の送信リクエストにつき追加で送信する回数 を指します。通信環境が悪い場合は、再送回数を設定するとデータの到達率が向上する場合があります。ただし、通信時間と消費電力は再送に応じて増加します。
インタラクティブモードでは2桁の数値を入力します。
十の位:再送回数 一の位:送信出力3が最強2/1/0と1段階小さくなるたびに -11.5dB の出力低下 例
32 → 再送3回、出力1段階弱める93 → 再送9回、出力最大
理論上の伝達距離は6dBです。設定値を小さくするたびに半分となりますから、1段階小さくした場合の伝達距離は約4分の1になるものと予想されます。ただし、実際の距離はノイズや遮蔽物の有無に依存します。
設定の初期化 設定内容によっては、操作へ支障をきたす場合があります(ボーレート変更など)。
次の手順で初期化できます。
他のアプリへ書き換え インタラクティブモードへ切り替え 元のアプリへ書き戻す 各 TWELITE APPS に固有の設定 各アプリによって異なる設定については、以下のページをご覧ください。
1.3.1 - TWELITE APPS(統合版)マニュアル TWELITE APPS を一つにまとめた統合版のファームウェア
主に TWELITE GOLD シリーズでは、超簡単!標準アプリApp_Tweliteなどの TWELITE APPS を統合し、書き換え作業を行わずに機能を切り替えられるようにしたファームウェアを使用できます。
1.3.1.1 - TWELITE APPS(統合版)マニュアル 最新版
TWELITE_Apps は、超簡単!標準アプリApp_Tweliteなどの TWELITE APPS を統合し、書き換え作業を行わずに機能を切り替えられるようにしたファームウェアです。いわば TWELITE APPS のアソートパックのようなものです。
工場出荷時の TWELITE STICK に書き込まれています。
概要 統合版のファームウェアは、次の TWELITE APPS をバンドルしています。
それぞれの TWELITE APPS は排他的に動作し、単体版と同じように振る舞います。
個々の機能については、各 TWELITE APPS の説明をご覧ください。
切り替えはリセットを伴いますが、ファームウェアを書き換えることなく、ソフトウェアから実行できます。
切り替え方法 1. インタラクティブモードを開く TWELITE APPS のインタラクティブモードにアクセス したうえで、: (AppSel) を入力してください。
[CONFIG MENU/App_Wings:PARENT:0/v1-03-2/SID=8300051A]
a: (0x67720102) アプリケーションID [HEX:32bit]
c: (18 ) 周波数チャネル(複数可) [11-26]
x: ( 0x03) 送信出力と再送回数 [HEX:8bit]
b: (115200,8N1) UART代替ボーレート [XXXXX]
o: (0x00000000) オプションビット [HEX:32bit]
t: (0xA5A5A5A5) 暗号鍵 [HEX:32bit]
[ESC]:Exit [!]:Reset System [*]:Extr Menu [:]:AppSel 2. TWELITE APPS の一覧を開く 次のようなメニューに TWELITE APPS の一覧が表示されます。
[TWELITE AppSel(アプリ選択)/v0-02-1/SID=8300051A/SAVE=00-00-00]
M: AppSel アプリ選択(この画面)
R: デフォルトに戻す(*DEF)
A: App_Twelite 超簡単!標準アプリ(App_Twelite)
B: App_IO リモコンアプリ(App_IO)
C: App_UART UART(シリアル)通信アプリ (App_Uart)
D: App_Wings 親機・中継機アプリ(App_Wings)(*DEF)
E: App_OTA OTA アプリ (ARIA/CUE)
[!]:リセット [R]:戻す [$]:LANG=日本語 3. TWELITE APPS を選択する インタラクティブモードと同じように、コマンドIDの文字を入力することで TWELITE APPS を選択できます。
例えば、上記の例では C を入力することで App_Uart に切り替えできます。
[App_UART / UART(シリアル)通信アプリ (App_Uart)]
UART(シリアル)通信を無線化するアプリです。UARTは多くのマイコンで一般的に利用されています。
=== 以下より選択してください。起動アプリを保存します ===
1: 通常
2: TWELITE UART用
[BS]:戻る
切り替えを行う画面では、必要に応じてバリエーションを選択してください。
その後、ただちに TWELITE APPS の切り替えとリセットが行われます。
TWELITE APPS の初期化 TWELITE APPS の一覧において Rを入力することで、既定の TWELITE APP に戻すことができます。
! セーブデータを消去します. 続くキーを入力してください.
S: 起動アプリの初期化(規定アプリ)
!: 全てのセーブデータを消去
[BS]:Back
Sを入力した場合は単に切り替えを行いますが、! を入力した場合には設定データも初期化したうえで切り替えます。
1.3.2 - 超簡単!標準アプリ マニュアル デジタル・アナログ信号伝送
親機と子機の入出力状態がシンクロ(同期)します。デジタル4ポート、アナログ4ポート、シリアル、I2Cを使用出来るオールインパッケージです。多彩な機能を単純化してわかりやすい反面、処理速度や応答性、省電力性は追求していません。
1.3.2.1 - 超簡単!標準アプリ マニュアル 最新版
工場出荷時の TWELITE や TWELITE DIP へインストールされています。
ダウンロード 超簡単!標準アプリ(App_Twelite)を導入するには TWELITE STAGE SDK をインストールして、TWELITE STAGE アプリを使って書き換え てください。
1.3.2.1.1 - 超簡単!標準アプリのピン配置 超簡単!標準アプリが使用するピンの機能
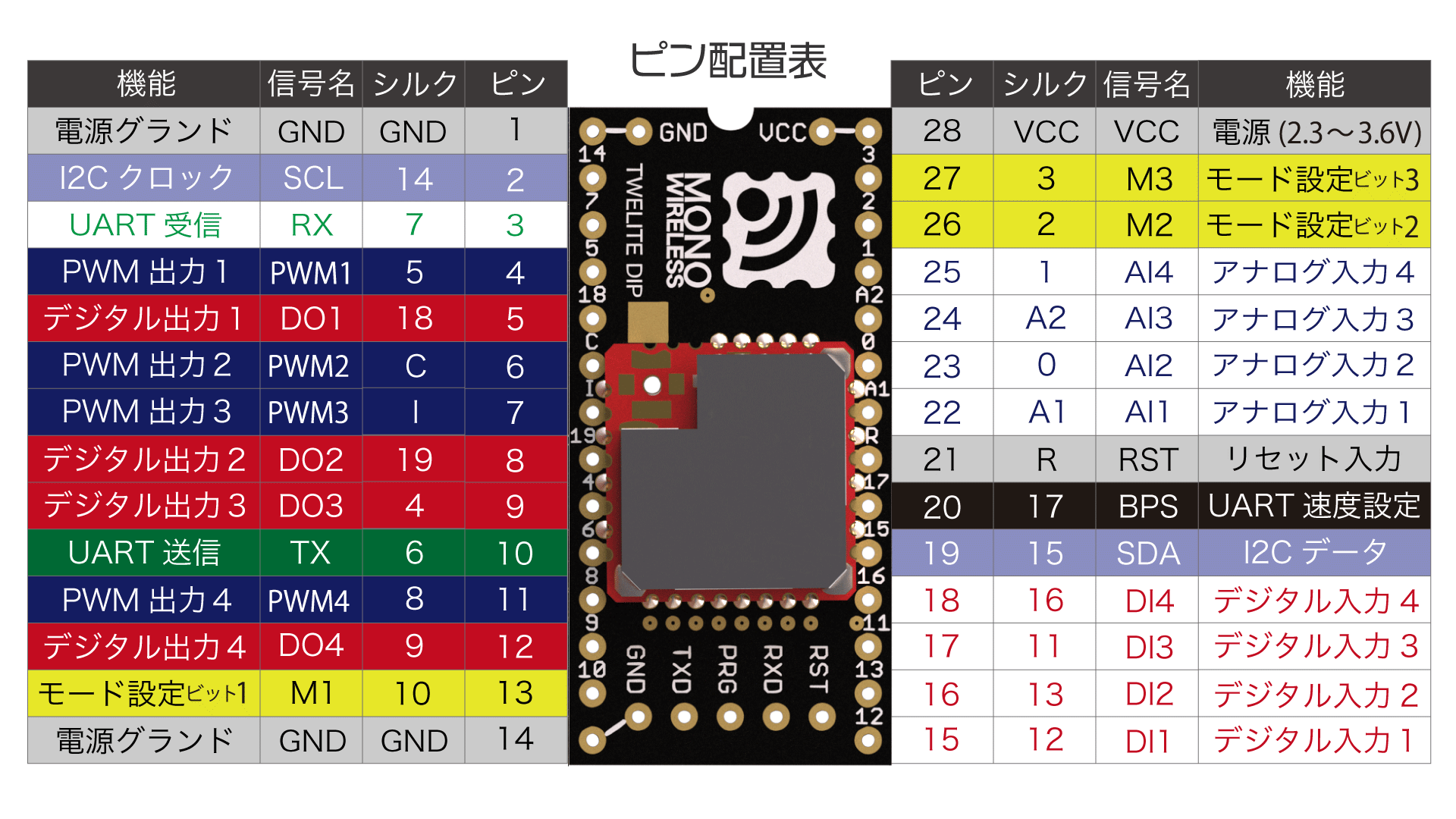
超簡単!標準アプリ(App_Twelite)が使用するピンの機能とその配置
ピン配置 ピン配置表
xは任意の数字を表します。例えば、M1 M2 M3 の総称を Mx と表しています。
電源入力 VCC/GND には、3.3V(2.3-3.6V)の電源を接続します。
デジタル・アナログ入出力 DIx/DOx, AIx/PWMx ピンは、対応する番号のピンが同期して信号伝送を行います。
デジタル アナログ DIxの入力→DOxの出力AIxの入力→PWMxの出力
超簡単!標準アプリでは、アナログ入力の電圧範囲を 0-2V としています。
VCCへ接続するなど、2V以上の電圧を入力した際は未使用扱いとなります。
シリアル通信 UART TX/RX は、UART 通信の送信と受信に使用します。具体的には、次のような場面で使用します。
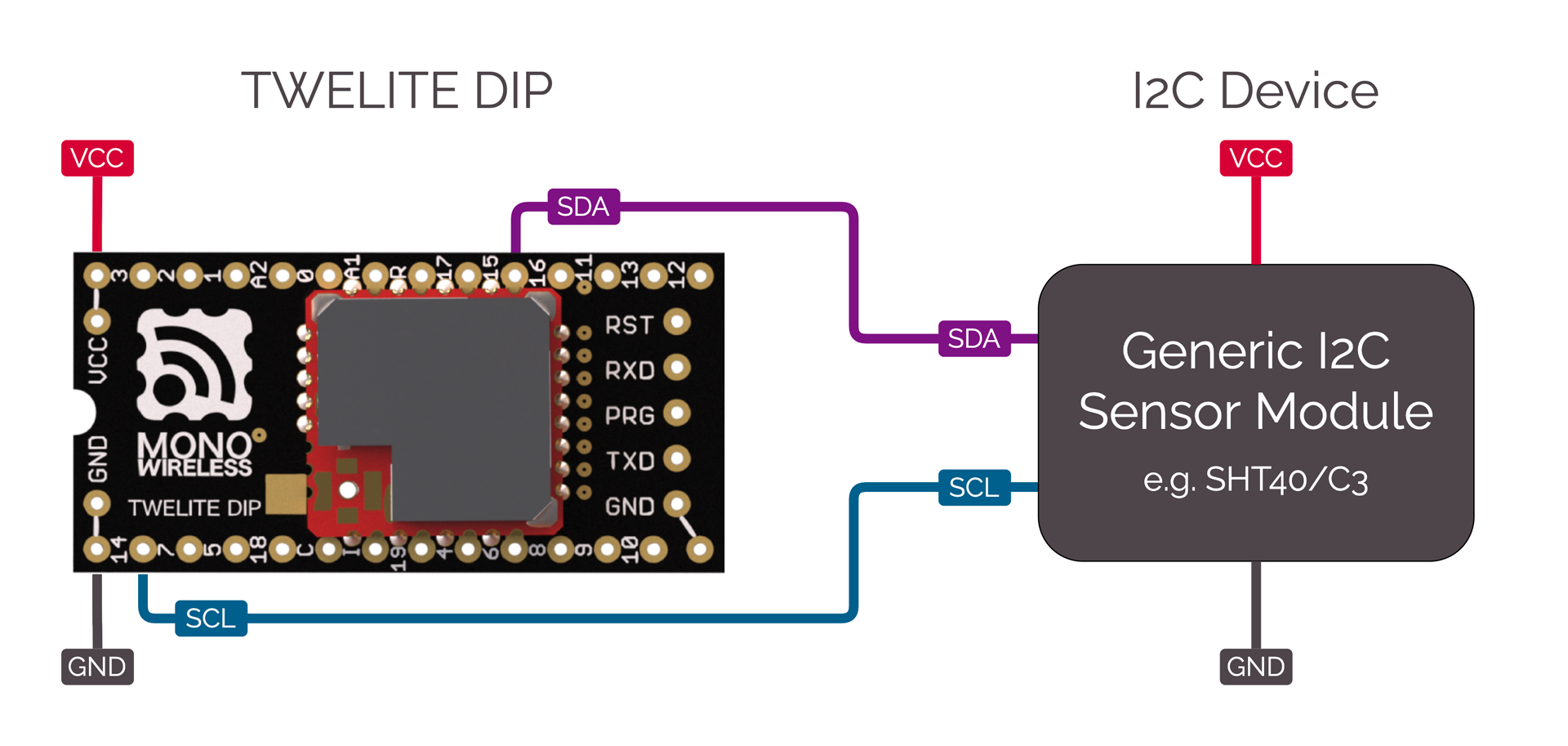
無線による信号伝送 外部デバイスとの有線通信 ファームウェアの管理 I2C SCL/SDAピンは、I2C のターゲットデバイスを接続する際に使用します。
設定入力 Mxピンを未接続またはGNDへ接続することで、親機、子機、中継機といった動作モードを切り替える ことができます。
BPSピンを未接続またはGNDへ接続することで、UART のボーレート(通信速度)を 115200bps 以外の値へ変更 できます。
リセット入力 リセット入力ピン RST と GNDとの間にプッシュボタンを接続することで、リセットボタンを実装できます。RST は内部プルアップされています。
1.3.2.1.2 - 超簡単!標準アプリの動作モード 各動作モードの説明
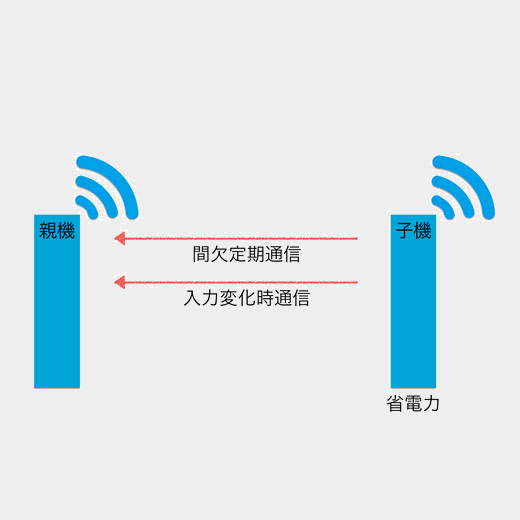
超簡単!標準アプリ(App_Twelite)には、7つの動作モードがあります。
動作モードの一覧 各モードは、Mx ピンを未接続または GND へ接続することで設定します。
M3M2M1モード 機能 省電力動作 LID初期値 O O O 子機:連続 入力状態を親機へ送信するほか、常に受信データを待機して出力へ反映します 120O O G 親機:連続 入力状態を子機へ送信するほか、常に受信データを待機して出力へ反映します 0O G O 中継機:連続 常に受信データを待機して中継します 122O G G 子機:連続0.03秒 頻繁に入力状態を親機へ送信するほか、常に受信データを待機して出力へ反映します 123G O O 子機:間欠1秒 1秒おきに入力状態を親機へ送信するほか、受信を無効化して常に節電モードへ入ります ✅ 124G O G 子機:間欠受信1秒 1秒おきに入力状態を親機へ送信するほか、同時に受信を行い常に節電モードへ入ります ✅ 125G G O - 未使用 - - G G G 子機:間欠10秒 10秒おきに入力状態を親機へ送信するほか、受信を無効化して常に節電モードへ入ります ✅ 127
O:未接続(OPEN)、G:GNDへ接続
初期状態は子機:連続モードです。
モードによって端末を識別するための論理デバイスID(LID)の初期値は異なります。
親機または中継機モードに限り、インタラクティブモード で切り替えできます。
親機は121、中継機は122としてください。
未使用のAIxポートの扱い 子機:連続/子機:連続0.03秒/親機:連続 モードでは、未使用の AIx ポートを VCC へ接続してください。
未使用の AIx ポートは不定の値を報告します。これらのモードは入力信号に変化が生じた際にデータ送信を行いますから、不要なデータ送信を引き起こす場合があります。
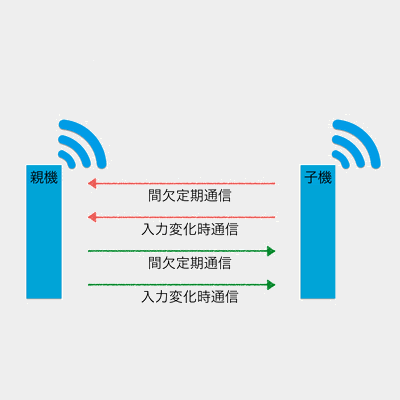
親機 連続モード 親機:連続モード 信号入力の変化を検知したとき、また1秒おきに、すべての子機へデータを送信します。
また子機から送信されるデータを常時待機しており、反応がよいものの、常に電力を消費します。
定期送信の無効化 インタラクティブモードでオプションビット 0x00000002 を設定することで、1秒おきの定期送信を無効化できます。
子機 連続モード 子機:連続モード 信号入力の変化を検知したとき、また1秒おきに、すべての親機へデータを送信します。
また親機から送信されるデータを常時待機しており、反応がよいものの、常に電力を消費します。
親機との通信のイメージ
定期送信の無効化 インタラクティブモードでオプションビット 0x00000002 を設定することで、1秒おきの定期送信を無効化できます。
子機:連続0.03秒モード 子機:連続モードの定期送信の間隔は1秒ですが、これを0.03秒に短縮するモードです。
親機から送信されるデータを常時待機しているものの、子機から親機への通信で帯域を占有してしまうため、親機の入力に対する反応は鈍くなってしまいます。常に電力を消費します。
親機との通信のイメージ
1台の子機だけでほとんどの帯域を占有してしまうため、同時に複数の子機を使用することはなるべく避けてください。
間欠モード 子機:間欠1秒モード 信号入力の変化を検知したとき、また1秒おきに節電モードを解除し、すべての親機へデータを送信します。
受信機能を無効とするため、親機の制御を受けることはできません。省電力性能に優れたモードです。
親機との通信のイメージ
子機:間欠10秒モード 信号入力の変化を検知したとき、また10秒おきに節電モードを解除し、すべての親機へデータを送信します。
受信機能を無効とするため、親機の制御を受けることはできません。省電力性能に優れたモードです。
親機との通信のイメージ
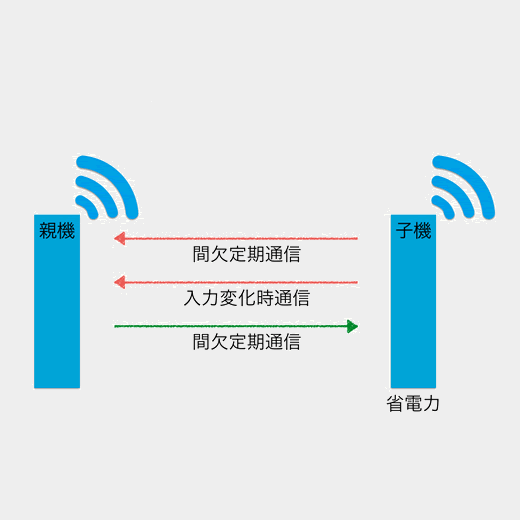
子機:間欠受信1秒モード 信号入力の変化を検知したとき、また1秒おきに節電モードを解除し、すべての親機へデータを送信します。
1秒おきに受信処理も合わせて行います。省電力性能に優れていますが、子機:間欠1秒モードには劣ります。
親機との通信のイメージ
間欠して受信するため、親機側を連続して動作させる必要があります。
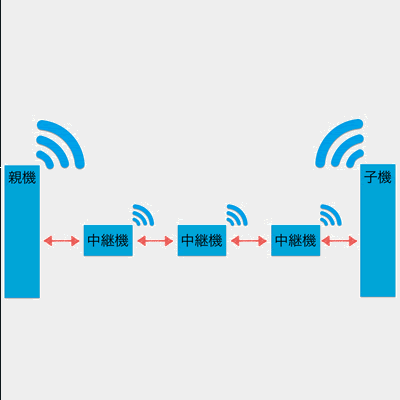
中継機 連続モード 中継機:連続モード 中継機は、受信したパケットを送信します。
親機と子機の間に3つまで設置できますが、中継機を増やすとパケットの数が増大するため、干渉しやすくなることに注意してください。
中継のイメージ
子機に中継機能を付与することもできます。インタラクティブモードのオプションビットに
0x00008000を指定してください。
1.3.2.1.3 - 超簡単!標準アプリの代替ボーレート設定 UART 通信に使用するボーレート設定の変更
超簡単!標準アプリ(App_Twelite)はデフォルトで 115200 bps のボーレートを UART 通信に使用しますが、これを変更できます。
代替ボーレート設定の有効化 BPS ピンを GND へ接続することで、代替ボーレート設定を有効化できます。
BPS内容 ボーレート 備考 O デフォルト 115200bps G 上書き設定 38400bps 変更 可
O:未接続(OPEN)、G:GNDへ接続
インタラクティブモードのボーレート設定は、代替ボーレートの値を示しています。BPS ピンが GND に接続されていないと、インタラクティブモードの設定値は適用されません。
インタラクティブモードは、UART 通信を利用します。TWELTIE のボーレートを切り替えた際は、インタラクティブモードを使用する前に PC 側のボーレートを合わせなくてはなりません(
TWELITE STAGE アプリの設定変更 )。
1.3.2.1.4 - 超簡単!標準アプリのUART機能 UART機能で利用するデータ形式
超簡単!標準アプリ(App_Twelite)の UART 機能で使用するデータ形式を解説します。
デジタル・アナログ入出力 0x81:相手端末からの状態通知受信した入力信号の状態を出力します。
データ形式 # データ 内容 備考 charヘッダ :のみ0 uint8送信元の論理デバイスID 1 uint8コマンド番号 0x81のみ2 uint8パケット識別子 アプリケーションIDより生成 3 uint8プロトコルバージョン 0x01のみ4 uint8LQI 0-2555 uint32送信元のシリアルID 0x8???????9 uint8送信先の論理デバイスID 10 uint16タイムスタンプ 1秒で64カウント 12 uint8中継回数 13 uint16電源電圧 単位はmV 15 int8- (未使用) 16 uint8デジタル信号 LSBから順にDIxへ対応、0がHigh1なら定期送信 17 uint8デジタル信号マスク LSBから順にDIxへ対応、1が有効 18 uint8AI1の変換値アナログ信号の計算 を参照、0xFFで未使用19 uint8AI2の変換値アナログ信号の計算 を参照、0xFFで未使用20 uint8AI3の変換値アナログ信号の計算 を参照、0xFFで未使用21 uint8AI4の変換値アナログ信号の計算 を参照、0xFFで未使用22 uint8AIxの補正値LSBから2ビットずつ順にAIxへ対応 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
アナログ信号の計算 AIxの入力電圧 \(V\)は、受信した変換値\(e_{r}\)および補正値\(e_{fr}\)を使って次のように表すことができます。
$$\begin{align*}
V &= e+e_f \\
\text{where} \\
e &= 16e_r \\
e_f &= 4e_{fr} \\
\end{align*}$$
単位は mV
出力データの例
:78811501C98201015A000391000C2E00810301FFFFFFFFFB
上記データの解釈 # データ 内容 値 :charヘッダ :780 uint8送信元の論理デバイスID 0x78811 uint8コマンド番号 0x81152 uint8パケット識別子 0x15013 uint8プロトコルバージョン 0x01C94 uint8LQI 201/2558201015A5 uint32送信元のシリアルID 0x201015A009 uint8送信先の論理デバイスID 0x00039110 uint16タイムスタンプ 約14.27秒 0012 uint8中継回数 00C2E13 uint16電源電圧 3118mV0015 int8- 8116 uint8デジタル信号 DI1 L DI2 HDI3 H DI4 H0317 uint8デジタル信号マスク DI1 DI20118 uint8AI1の変換値16mVFF19 uint8AI2の変換値未使用 FF20 uint8AI3の変換値未使用 FF21 uint8AI4の変換値未使用 FF22 uint8AIxの補正値AI1 0x03FBuint8チェックサム 0xFBcharフッタ \rcharフッタ \n
0x80:相手端末の出力変更相手端末の出力信号を制御します。
データ形式 # データ 内容 備考 charヘッダ :のみ0 uint8送信先の論理デバイスID 親機0x00,子機0x01-0x64,全子機0x78 1 uint8コマンド番号 0x80のみ2 uint8書式バージョン 0x01のみ3 uint8デジタル信号 LSBからDOxに対応、0でHigh 4 uint8デジタル信号マスク LSBからDOxに対応、1で有効 5 uint16PWM1信号0-1024,0xFFFFで無効7 uint16PWM2信号0-1024,0xFFFFで無効9 uint16PWM3信号0-1024,0xFFFFで無効11 uint16PWM4信号0-1024,0xFFFFで無効uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
UART 入出力 0x01:任意のデータの送信データ形式 # データ 内容 備考 charヘッダ :のみ0 uint8送信先の論理デバイスID 親機0x00,子機0x01-0x64,全子機0x78 1 uint8コマンド番号 0x01のみ2 [uint8]任意のデータ 長さ\(N\)のバイト列(\(N\leqq80\)を推奨) uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
0x01:任意のデータの受信データ形式 # データ 内容 備考 charヘッダ :のみ0 uint8送信元の論理デバイスID 親機0x00,子機0x01-0x64,未設定子機0x78 1 uint8コマンド番号 0x01のみ2 [uint8]任意のデータ 長さ\(N\)のバイト列 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
I2C 入出力 0x88:I2C 入力データ形式 # データ 内容 備考 charヘッダ :のみ0 uint8送信先の論理デバイスID 親機0x00,子機0-0x7F,全子機0x78,自身0xDB 1 uint8パケット識別子 0x88のみ2 uint8応答番号 応答メッセージへ出力する番号 3 uint8コマンド番号 書き込み0x1,読み出し0x2,読み書き0x4 4 uint8I2Cアドレス 7ビット 5 uint8I2Cコマンド 最初のコマンドバイト 6 uint8データサイズ 0はなし7 [uint8]データ 長さ\(N\)のバイト列 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
コマンド番号0x4では、データサイズに読み出すデータのサイズを指定したうえで、データを省略してください。指定されたI2Cコマンドを書き込み、データサイズの分だけ読み出しを行います。
0x89:I2C 出力データ形式 # データ 内容 備考 charヘッダ :のみ0 uint8送信元の論理デバイスID 親機0x00,子機0-0x7F,全子機0x78,自身0xDB 1 uint8パケット識別子 0x89のみ2 uint8応答番号 応答メッセージへ出力する番号 3 uint8コマンド番号 書き込み0x1,読み出し0x2,読み書き0x4 4 uint8結果 失敗0、成功1 5 uint8データサイズ 0はなし6 [uint8]データ 長さ\(N\)のバイト列 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
1.3.2.1.5 - インタラクティブモード(超簡単!標準アプリ) インタラクティブモードによる詳細な設定変更
インタラクティブモードでアプリの詳細設定を行うことができます。
ここでは超簡単!標準アプリ(App_Twelite)に固有の機能を説明します。共通機能については、TWELITE APPS マニュアル のトップページ を参照してください。
TWELITE がスリープしている間はインタラクティブモードを使用できません。
Mxピンの設定
表示例 次のような画面を表示します。
--- CONFIG/TWELITE APP V1-08-2/SID=0x8201001f/LID=0x78 ---
a: set Application ID (0x67720102)
i: set Device ID (--)
c: set Channels (18)
x: set Tx Power (03)
t: set mode4 sleep dur (1000ms)
y: set mode7 sleep dur (10s)
f: set mode3 fps (32)
z: set PWM HZ (1000,1000,1000,1000)
o: set Option Bits (0x00000000)
b: set UART baud (38400)
p: set UART parity (N)
---
S: save Configuration
R: reset to Defaults コマンド 各コマンドの詳細を次に示します。
a:アプリケーションID通信を行う端末はすべて同一の値とします。論理的にネットワークを分離します。
i:論理デバイスID複数の子機を識別する必要がある場合に設定します。
子機の場合は1-100の任意の値へ、親機の場合は121へ、中継機の場合は122へ設定してください。
121または122へ設定すると、親機または中継機モードへ切り替えできます。このときMxピンの設定は必要ありません。
超簡単!標準アプリでは、動作モードによって論理デバイスIDの初期値が異なります。
動作モードの一覧
c:周波数チャネル通信を行う端末はすべて同一の値とします。物理的にネットワークを分離します。
x:送信出力と再送回数電波の送信出力と、パケットを追加で送信する回数を指定します。
t:子機間欠1秒モードの間隔子機間欠1秒モードの間欠時間を1秒から他の値へ上書きします。単位はミリ秒です。
0を設定した場合は、タイマによる定期的な起床を無効化します。このときDIxの立ち下がりエッジにより起床しますが、立ち上がりエッジでは起床しません。
y:子機間欠10秒モードの間隔子機間欠10秒モードの間欠時間を10秒から他の値へ上書きします。単位は秒です。
0を設定した場合は、タイマによる定期的な起床を無効化します。このときDIxの立ち下がりエッジにより起床しますが、立ち上がりエッジでは起床しません。
f:子機連続0.03秒モードのサイクル毎秒の送信リクエストの数を32回から4/8/16回へ上書きします。再送回数は含みません。
z:PWMxの周波数値を一つ指定した場合は、すべてのPWMポートの周波数を上書きします。カンマ区切りで指定した場合は、PWM1-PWM4に個別の値を上書きできます。
o:オプションビット32bit の数値を指定します。各ビットに紐付いた設定を有効化できます。
b:UART代替ボーレートBPSピンをGNDへ接続して起動した場合に選択される代替ボーレートを38400bpsから上書きします。
値は9600/19200/38400/57600/115200/230400から選択できます。他の値を指定すると、誤差が生じる可能性があります。
BPSピンを開放して起動した場合、この設定は適用されません。115200bpsに固定されます。
ボーレート変更によってインタラクティブモードが使用できない事態を防ぐための仕様です。
p:UARTパリティNはパリティ無し、Oは奇数、E:は偶数を示します。
データビットは8、ストップビットは1で固定されます。ハードウェアフローは設定できません。
オプションビットの詳細 オプションビットの値の各ビットに紐付いた設定を解説します。
00000001:低レイテンシモード低レイテンシモードは、DIxの変化を検知してから速やかに送信を行うことで、受信側の遅延を短縮します。
低レイテンシモードの動作 初期状態ではDIxがDOxへ反映されるまでに30-70ms程度の遅延が生じます。低レイテンシモードでは、チャタリングや無線パケットの干渉を避けるための処理を簡略化することで、遅延を3-10ms程度に短縮します。
立ち下がりエッジの検出には割り込みを利用します 立ち上がりエッジの検出には定期的な判定を利用します1msおきに5回連続でHighである場合に送信します (初期状態では4msおきに5回連続でHighである場合に送信します) 検出時は送信および再送の遅延を設定しません。直ちに無線パケットを送信します 代表的な遅延は、DIxの立ち下がりの場合に約3-5ms、立ち上がりの場合に約10msです 実際の遅延は送受信の失敗などを理由に変化します 間欠モードにおいても、本体の起床から送信までの時間を短縮します 00000002:定期送信の無効化連続モードにおける1秒おきの定期送信を無効化します。
00000004:定期送信とUART出力の無効化子機:連続モードにおける1秒おきの定期送信を無効化するほか、受信データのUART出力を停止します。
00000010:AIxの変化による送信の無効化子機:連続モードにおいて、AIxの入力が変化した際の送信を無効化します。
開放されたAIxポートは不定の値を報告するため、正気状態でアナログ入力を利用しない場合はVCCへ接続する必要があります。このオプションを設定すると、VCCへの接続を省略できます。
00000020:AIxの値の無効化ADCの計測値を使用せず、未使用ポート(0xFFFF)扱いとしてパケットを送信します
00000040:PWMxの計算式を変更初期状態ではボリューム用に調節した出力を PWMx へ適用します。
このオプションはこれを無効化し、1.8V 以下の入力に対してフルスケールの出力を行います。
デューティ比の計算式 デューティ比 \(duty\)は、入力電圧\(V_{input}\)と電源電圧\(V_{cc}\)を使って、(1) のように表すことができます。
$$\begin{align}
duty &= min(230\frac{V_{input}}{V_{cc}}-5, 100) \\
duty &= 100\frac{min(V_{input}, 1.8)}{1.8}
\end{align}$$
このオプションを有効化すると、代わりに (2) を適用します。
なお、2.0V 以上の入力は未使用扱いとなります。
00000100:ボタン押下時のみ送信DIxの入力が Low であるときにパケットを連続送信します。
例えば、モータを遠隔制御する際に利用します。リモコンのボタンを押している間にモータを回転させ、電波が途切れた場合に停止させることができます。
連続送信の動作 DIxのいずれかが Low のときは、1秒につき32回送信しますDIxのすべてが High へ遷移してから1秒間は引き続き32回送信しますDOxのいずれかが Low へ遷移してから0.5秒間パケットを受信しなかった場合は、DOxをすべて High へ戻します。PWMxは保持します00000800:DIxの内部プルアップを停止DIxの内部プルアップ(約50kΩ)をすべて停止します。
起動してからハードウェアの初期化を完了するまでの約1msの期間はプルアップされます。
00008000:子機へ中継機能を付与子機:連続モードにおいて中継機能を付与します。最大中継段数は1です。
00001000:子機中継時の最大中継段数を2とする00008000:子機へ中継機能を付与
00002000:子機中継時の最大中継段数を3とする00008000:子機へ中継機能を付与
00010000:PWMxの波形を反転PWMxの出力波形を反転します。
AIxへ最大値を入力すると PWMxは Low となります。
00020000:起動後PWMxを落とす起動後またはリセット後にPWMxの出力を Low 状態とします。
起動してからハードウェアの初期化を完了するまでの約1msの期間は High 状態となります。
00080000:代替ポート割り当て代替ポート割り当てを有効化します。
PWM2/PWM3へトランジスタ等を接続すると、動作が不安定となる場合があります(詳細 )そうした場合に利用してください。
代替ポート割り当ての内容 PWMxの割り当て変更DI3→PWM1DI1→PWM2DI2→PWM3BPS→PWM4DIxの割り当て変更PWM1→DI1PWM4→DI2SDA→DI3DI4→DI4(変更なし)BPSの割り当て変更SCL/SDAを無効化00100000:起動後2秒間DOxを落とす起動後またはリセット後にDOxを2秒間 Low 状態とします。
DOx へ接続した LED を起動時に点灯させることができます。
起動してからハードウェアの初期化を完了するまでの約1msの期間は High 状態となります。
00400000:DOxの出力を反転DOxの出力を反転します。
初期状態とは異なり、片方の DI が Low レベルになると、もう片方の DO は High レベルとなります。
DOの初期状態は Low ですが、起動してからハードウェアの初期化を完了するまでの約1msの期間は High 状態となります。
00800000:DOxの内部プルアップを停止DOxの内部プルアップ(約50kΩ)をすべて停止します。
1.3.3 - 親機・中継機アプリ マニュアル データ集約と通信範囲拡張に。
超簡単!標準アプリやパルアプリなどの TWELITE APPS やact のパケットを受信と中継をするアプリです。
1.3.3.1 - 親機・中継機アプリ マニュアル v1.3.2 GOLD 最新版
TWELITE GOLD シリーズにプリインストールされる最新版を対象としています。
BLUE/RED シリーズの安定版はこちら
TWELITE APPS や act の子機に対する親機や中継機として働きます。
機能 TWELITE APPSとactの全てのデータパケットを処理することができ、共通の親機または中継機として使用できます。
超簡単!標準アプリやパル専用アプリなどの TWELITE APPS や act のデータを1つの MONOSTICK で収集可能 16チャンネルで複数システムを個別に運用可能 アプリケーションIDの設定することで、同一チャネルに複数システムを混在可能 中継機能で通信範囲拡大 1.3.3.1.1 - 親機・中継機アプリの動作モード 親機・中継機アプリの動作モード
親機モードと中継機モードの2つのモードがあります。
1.3.3.1.1.1 - 親機・中継機アプリの親機モード 子機からデータを受信、子機へデータを送信する
子機から送信されたデータを受信し、シリアルポートから出力します。また、シリアルポートへ入力されたコマンドを子機へ送信します。
1.3.3.1.1.1.1 - 親機・中継機アプリの受信メッセージ 子機からデータを受信した際の出力
子機から送信されたデータを受信し、既定の書式でシリアルポートから出力します。
1.3.3.1.1.1.1.1 - 超簡単!標準アプリからの出力(親機・中継機アプリ) 超簡単!標準アプリからデータを受信した際の出力書式
0x81:相手端末からの状態通知受信した入力信号の状態を出力します。
データ形式 # データ 内容 備考 charヘッダ :のみ0 uint8送信元の論理デバイスID 1 uint8コマンド番号 0x81のみ2 uint8パケット識別子 アプリケーションIDより生成 3 uint8プロトコルバージョン 0x01のみ4 uint8LQI 0-2555 uint32送信元のシリアルID 0x8???????9 uint8送信先の論理デバイスID 10 uint16タイムスタンプ 1秒で64カウント 12 uint8中継回数 13 uint16電源電圧 単位はmV 15 int8- (未使用) 16 uint8デジタル信号 LSBから順にDIxへ対応、0がHigh1なら定期送信 17 uint8デジタル信号マスク LSBから順にDIxへ対応、1が有効 18 uint8AI1の変換値アナログ信号の計算 を参照、0xFFで未使用19 uint8AI2の変換値アナログ信号の計算 を参照、0xFFで未使用20 uint8AI3の変換値アナログ信号の計算 を参照、0xFFで未使用21 uint8AI4の変換値アナログ信号の計算 を参照、0xFFで未使用22 uint8AIxの補正値LSBから2ビットずつ順にAIxへ対応 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
アナログ信号の計算 AIxの入力電圧 \(V\)は、受信した変換値\(e_{r}\)および補正値\(e_{fr}\)を使って次のように表すことができます。
$$\begin{align*}
V &= e+e_f \\
\text{where} \\
e &= 16e_r \\
e_f &= 4e_{fr} \\
\end{align*}$$
単位は mV
出力データの例
:78811501C98201015A000391000C2E00810301FFFFFFFFFB # データ 内容 値 :charヘッダ :780 uint8送信元の論理デバイスID 0x78811 uint8コマンド番号 0x81152 uint8パケット識別子 0x15013 uint8プロトコルバージョン 0x01C94 uint8LQI 201/2558201015A5 uint32送信元のシリアルID 0x201015A009 uint8送信先の論理デバイスID 0x00039110 uint16タイムスタンプ 約14.27秒 0012 uint8中継回数 00C2E13 uint16電源電圧 3118mV0015 int8- 8116 uint8デジタル信号 DI1 L DI2 HDI3 H DI4 H0317 uint8デジタル信号マスク DI1 DI20118 uint8AI1の変換値16mVFF19 uint8AI2の変換値未使用 FF20 uint8AI3の変換値未使用 FF21 uint8AI4の変換値未使用 FF22 uint8AIxの補正値AI1 0x03FBuint8チェックサム 0xFBcharフッタ \rcharフッタ \n
データの判別条件 親機・中継機アプリは、さまざまな種類の子機からデータを受信することができます。
出力されたデータが超簡単!標準アプリのものであるかを確認するには、次の箇所を参照してください。
# データ 項目 条件 1 uint8コマンド番号 0x81であること3 uint8プロトコルバージョン 0x01であること5 uint32送信元のシリアルID MSBが1であること(0x8???????) - - ペイロードのサイズ 23バイトであること(:とチェックサムの間)
パーサの実装例 0x01:任意のデータの受信データ形式 # データ 内容 備考 charヘッダ :のみ0 uint8送信元の論理デバイスID 親機0x00,子機0x01-0x64,未設定子機0x78 1 uint8コマンド番号 0x01のみ2 [uint8]任意のデータ 長さ\(N\)のバイト列 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
1.3.3.1.1.1.1.2 - リモコンアプリからの出力(親機・中継機アプリ) リモコンアプリからデータを受信した際の出力書式
0x81:相手端末からの状態通知受信した入力信号の状態を出力します。
データ形式 # データ 内容 備考 charヘッダ :のみ0 uint8送信元の論理デバイスID 1 uint8コマンド番号 0x81のみ2 uint8パケット識別子 0x0Fのみ3 uint8プロトコルバージョン 0x01のみ4 uint8LQI 0-2555 uint32送信元のシリアルID 0x8???????9 uint8送信先の論理デバイスID 10 uint16タイムスタンプ 1秒で64カウント、MSBは内部フラグ 12 uint8中継回数 13 uint16デジタル信号 LSBから順にIxへ対応、0がHigh 15 uint16デジタル信号マスク LSBから順にIxへ対応、1なら有効 17 uint16デジタル信号フラグ LSBから順にIxへ対応、1なら割り込み 19 uint8未使用 内部管理用 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
出力データの例
:01810F01DB8630000200645F000040004F00400049 # データ 内容 値 :charヘッダ :010 uint8送信元の論理デバイスID 0x78811 uint8コマンド番号 0x810F2 uint8パケット識別子 0x15013 uint8プロトコルバージョン 0x01DB4 uint8LQI 219/255863000025 uint32送信元のシリアルID 0x6300002009 uint8送信先の論理デバイスID 0x00645F10 uint16タイムスタンプ 約401秒 0012 uint8中継回数 0004013 uint16デジタル信号 I7がLo004F15 uint16デジタル信号マスク I7,I1-I4が有効004017 uint16デジタル信号フラグ I7は割り込みにより変化0019 uint8未使用 49uint8チェックサム 0x49charフッタ \rcharフッタ \n
データの判別条件 親機・中継機アプリは、さまざまな種類の子機からデータを受信することができます。
出力されたデータがリモコンアプリのものであるかを確認するには、次の箇所を参照してください。
# データ 項目 条件 1 uint8コマンド番号 0x81であること3 uint8プロトコルバージョン 0x02であること5 uint32送信元のシリアルID MSBが1であること(0x8???????) - - ペイロードのサイズ 20バイトであること(:とチェックサムの間)
パーサの実装例 1.3.3.1.1.1.1.3 - シリアル通信アプリからの出力(親機・中継機アプリ) シリアル通信アプリからデータを受信した際の出力書式
本アプリでは、書式モードの電文のみ受信できます。
透過モードやチャットモードのパケットを受信した場合の出力は未定義ですから、ご注意ください。
書式モード:簡易形式 データ形式 # データ 内容 備考 charヘッダ :のみ0 uint8送信元の論理デバイスID 親機0x00,子機0x01-0x64,未設定子機0x78 1 uint8コマンド番号 送信側で指定した0x80未満の値 2 [uint8]任意のデータ 長さ\(N\)のバイト列 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
出力データの例
# データ 内容 値 :charヘッダ :780 uint8送信元の論理デバイスID ID未設定子機 011 uint8コマンド番号 0x0100112233AABBCCDD2 [uint8]任意のデータ そのまま 13uint8チェックサム 0x13charフッタ \rcharフッタ \n
データの判別条件 親機・中継機アプリは、さまざまな種類の子機からデータを受信することができます。
出力されたデータがシリアル通信アプリ(書式モード:簡易形式)のものであるかを確認するには、次の箇所を参照してください。
# データ 項目 条件 0 uint8送信元の論理デバイスID 0x64以下もしくは0x78であること1 uint8コマンド番号 0x80未満であること- - ペイロードのサイズ 3バイト以上82バイト以下であること
緩い条件のため、超簡単!標準アプリなど他のパケットの条件に続けて確認してください。
パーサの実装例 書式モード:拡張書式 データ形式 # データ 内容 備考 charヘッダ :のみ0 uint8送信元の論理デバイスID 親機0x00,子機0x01-0x64,未設定子機0x78 1 uint8コマンド番号 0xA0のみ2 uint8応答ID 送信側で指定した値 3 uint32送信元の拡張アドレス シリアルIDの先頭へ0x8を加えた値 7 uint32送信先の拡張アドレス 論理デバイスID使用時は0xFFFFFFFF 11 uint8LQI 受信時の電波通信品質 12 uint16続くバイト列の長さ バイト数\(M\)を表す 14 [uint8]任意のデータ 長さ\(M\)のバイト列 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
出力データの例
:78A0028201015AFFFFFFFFA8000700112233AABBCCC6 # データ 内容 備考 :charヘッダ :780 uint8送信元の論理デバイスID ID未設定子機 A01 uint8コマンド番号 0xA0022 uint8応答ID 0x028201015A3 uint32送信元の拡張アドレス 0x201015AFFFFFFFF7 uint32送信先の拡張アドレス 論理デバイスID指定 A811 uint8LQI 168/255000712 uint16続くバイト列の長さ 7バイト00112233AABBCC14 [uint8]任意のデータ そのまま C6uint8チェックサム 0xC6charフッタ charフッタ
データの判別条件 親機・中継機アプリは、さまざまな種類の子機からデータを受信することができます。
出力されたデータがシリアル通信アプリ(書式モード:拡張形式)のものであるかを確認するには、次の箇所を参照してください。
# データ 項目 条件 0 uint8送信元の論理デバイスID 0x64以下もしくは0x78であること1 uint8コマンド番号 0xA0であること2 uint8応答ID 0x80未満であること3 uint32送信元の拡張アドレス MSBが1であること(0x8???????) 12 uint16続くバイト列の長さ ペイロードのサイズ - 14バイトであること
パーサの実装例 1.3.3.1.1.1.1.4 - パル/キュー/アリアアプリからの出力(親機・中継機アプリ) パル/キュー/アリアアプリからデータを受信した際の出力書式
1.3.3.1.1.1.1.4.1 - パルアプリからの出力(親機・中継機アプリ) パルアプリからデータを受信した際の出力書式
全般 パルアプリから受信したデータは、センサ種別とその値からなるセンサーデータの羅列によって表現します。
パルアプリに共通する書式の詳細については、
共通書式の詳細 をご覧ください。
以降では、製品の種別に応じた具体的な例を取り上げます。
開閉センサーパル データ形式 # データ 内容 備考 charヘッダ :のみ0 uint32中継機のシリアルID 中継なしの場合80000000 4 uint8LQI 0-2555 uint16続き番号 7 uint32送信元のシリアルID 0x8???????11 uint8送信元の論理デバイスID 12 uint8センサー種別 0x80のみ13 uint8PAL基板バージョンとPAL基板ID 0x81のみ14 uint8センサーデータ の数3のみセンサーデータ1 15 uint8情報ビット 0x11のみ16 uint8データソース 0x30のみ17 uint8拡張バイト 0x08のみ18 uint8データ長 2のみ19 uint16データ 電源電圧(mV) センサーデータ2 21 uint8情報ビット 0x11のみ22 uint8データソース 0x30のみ23 uint8拡張バイト 0x01のみ24 uint8データ長 2のみ25 uint16データ ADC1の電圧(mV) センサーデータ3 27 uint8情報ビット 0x00のみ28 uint8データソース 0x00のみ29 uint8拡張バイト 0x00のみ30 uint8データ長 1のみ31 uint8データ 磁気データ センサーデータの末端 32 uint8チェックサム1 直前までのCRC8 uint8チェックサム2 チェックサム1までのLRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
出力データの例
:80000000A8001C82012B1E01808103113008020D0C1130010203E40000000101EC6E # データ 内容 値 :charヘッダ :800000000 uint32中継機のシリアルID 中継なし A84 uint8LQI 168/255001C5 uint16続き番号 2882012B1E7 uint32送信元のシリアルID 0x2012B1E0111 uint8送信元の論理デバイスID 0x018012 uint8センサー種別 8113 uint8PAL基板バージョンとPAL基板ID 開閉パルV1 0314 uint8センサーデータ の数3つセンサーデータ1 1115 uint8情報ビット 拡張バイトありuint16 3016 uint8データソース 電圧 0817 uint8拡張バイト 電源 0218 uint8データ長 2バイト0D0C19 uint16データ 3340mVセンサーデータ2 1121 uint8情報ビット 拡張バイトありuint16 3022 uint8データソース 電圧 0123 uint8拡張バイト ADC1 0224 uint8データ長 2バイト03E425 uint16データ 996mVセンサーデータ3 0027 uint8情報ビット 拡張バイトなしuint8 0028 uint8データソース 磁気 0029 uint8拡張バイト なし 0130 uint8データ長 1バイト0131 uint8データ N極が近づいた センサーデータの末端 EC32 uint8チェックサム1 0xEC6Euint8チェックサム2 0x6Echarフッタ '\r'charフッタ '\n'
データの判別条件 親機・中継機アプリは、さまざまな種類の子機からデータを受信することができます。
出力されたデータがパルアプリ(開閉センサーパル)のものであるかを確認するには、次の箇所を参照してください。
# データ 項目 条件 0 uint32中継機のシリアルID MSBが1であること 7 uint32送信元のシリアルID MSBが1であること 12 uint8センサー種別 0x80であること13 uint8PAL基板バージョンとPAL基板ID 0x81であること- - ペイロードのサイズ 33バイトであること
パーサの実装例 環境センサーパル データ形式 # データ 内容 備考 charヘッダ :のみ0 uint32中継機のシリアルID 中継なしの場合80000000 4 uint8LQI 0-2555 uint16続き番号 7 uint32送信元のシリアルID 0x8???????11 uint8送信元の論理デバイスID 12 uint8センサー種別 0x80のみ13 uint8PAL基板バージョンとPAL基板ID 0x82のみ14 uint8センサーデータ の数5のみセンサーデータ1 15 uint8情報ビット 0x11のみ16 uint8データソース 0x30のみ17 uint8拡張バイト 0x08のみ18 uint8データ長 2のみ19 uint16データ 電源電圧(mV) センサーデータ2 21 uint8情報ビット 0x11のみ22 uint8データソース 0x30のみ23 uint8拡張バイト 0x01のみ24 uint8データ長 2のみ25 uint16データ ADC1の電圧(mV) センサーデータ3 27 uint8情報ビット 0x05のみ28 uint8データソース 0x01のみ29 uint8拡張バイト 0x00のみ30 uint8データ長 2のみ31 int16データ 温度データ センサーデータ4 33 uint8情報ビット 0x01のみ34 uint8データソース 0x02のみ35 uint8拡張バイト 0x00のみ36 uint8データ長 2のみ37 uint16データ 湿度データ センサーデータ5 39 uint8情報ビット 0x02のみ40 uint8データソース 0x03のみ41 uint8拡張バイト 0x00のみ42 uint8データ長 4のみ43 uint32データ 照度データ センサーデータの末端 47 uint8チェックサム1 直前までのCRC8 uint8チェックサム2 チェックサム1までのLRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
出力データの例
:8000000084811F810EFF6D04808205113008020AEB11300102035A0501000209E3010200020E3A02030004000001BE6C00 # データ 内容 値 :charヘッダ :800000000 uint32中継機のシリアルID 中継なし 844 uint8LQI 132/255811F5 uint16続き番号 33055810EFF6D7 uint32送信元のシリアルID 0x10EFF6D0411 uint8送信元の論理デバイスID 0x048012 uint8センサー種別 8213 uint8PAL基板バージョンとPAL基板ID 環境パルV1 0514 uint8センサーデータ の数5つセンサーデータ1 1115 uint8情報ビット 拡張バイトありuint16 3016 uint8データソース 電圧 0817 uint8拡張バイト 電源 0218 uint8データ長 2バイト0AEB19 uint16データ 2795mVセンサーデータ2 1121 uint8情報ビット 拡張バイトありuint16 3022 uint8データソース 電圧 0123 uint8拡張バイト ADC1 0224 uint8データ長 2バイト035A25 uint16データ 858mVセンサーデータ3 0527 uint8情報ビット 拡張バイトなしint16 0128 uint8データソース 温度 0029 uint8拡張バイト なし 0230 uint8データ長 2バイト09E331 int16データ 25.31°C センサーデータ4 0133 uint8情報ビット 拡張バイトなしuint16 0234 uint8データソース 湿度 0035 uint8拡張バイト なし 0236 uint8データ長 2バイト0E3A37 uint16データ 36.42% センサーデータ5 0239 uint8情報ビット 拡張バイトなしuint32 0340 uint8データソース 照度 0041 uint8拡張バイト なし 0442 uint8データ長 4バイト000001BE43 uint32データ 446lxセンサーデータの末端 6C47 uint8チェックサム1 0x6C00uint8チェックサム2 0x00charフッタ '\r'charフッタ '\n'
データの判別条件 親機・中継機アプリは、さまざまな種類の子機からデータを受信することができます。
出力されたデータがパルアプリ(環境センサーパル)のものであるかを確認するには、次の箇所を参照してください。
# データ 項目 条件 0 uint32中継機のシリアルID MSBが1であること 7 uint32送信元のシリアルID MSBが1であること 12 uint8センサー種別 0x80であること13 uint8PAL基板バージョンとPAL基板ID 0x82であること- - ペイロードのサイズ 48バイトであること
パーサの実装例 動作センサーパル データ形式 出力データの例
:80000000BA002382011CEF01808312113008020D0211300102055C1504400600100010045015044106000800100430150442060000001004381504430600080018043015044406000000180458150445060000002004381504460600080018042815044706FFE80010042015044806FFF00010043815044906FFE80018043015044A06FFF80018044015044B06FFF80018041815044C0600000010042015044D0600000028045015044E0600000008043815044F0600000018043828A5 # データ 内容 値 :charヘッダ :800000000 uint32中継機のシリアルID 中継なし BA4 uint8LQI 186/25500235 uint16続き番号 3582011CEF7 uint32送信元のシリアルID 0x2011CEF0111 uint8送信元の論理デバイスID 0x018012 uint8センサー種別 8313 uint8PAL基板バージョンとPAL基板ID 動作パルV1 1214 uint8センサーデータ の数18個センサーデータ1 1115 uint8情報ビット 拡張バイトありuint16 3016 uint8データソース 電圧 0817 uint8拡張バイト 電源 0218 uint8データ長 2バイト0D0219 uint16データ 3330mVセンサーデータ2 1121 uint8情報ビット 拡張バイトありuint16 3022 uint8データソース 電圧 0123 uint8拡張バイト ADC1 0224 uint8データ長 2バイト055C25 uint16データ 1372mVセンサーデータ3 1527 uint8情報ビット 拡張バイトありint16 0428 uint8データソース 加速度 4029 uint8拡張バイト 100Hz, 0番サンプル 0630 uint8データ長 6バイト00100010045031 int16データ X16mG/Y16mG/Z1104mG センサーデータ4 1537 uint8情報ビット 拡張バイトありint16 0438 uint8データソース 加速度 4139 uint8拡張バイト 100Hz, 1番サンプル 0640 uint8データ長 6バイト00080010043041 uint16データ X8mG/Y16mG/Z1072mG センサーデータ5 <省略> センサデータ15 15177 uint8情報ビット 拡張バイトありint16 04178 uint8データソース 加速度 4F179 uint8拡張バイト 100Hz, 15番サンプル 06180 uint8データ長 6バイト000000180438181 uint32データ X0mG/Y24mG/Z1080mG センサーデータの末端 28187 uint8チェックサム1 0x28A5uint8チェックサム2 0xA5charフッタ '\r'charフッタ '\n'
データの判別条件 親機・中継機アプリは、さまざまな種類の子機からデータを受信することができます。
出力されたデータがパルアプリ(動作センサーパル)のものであるかを確認するには、次の箇所を参照してください。
# データ 項目 条件 0 uint32中継機のシリアルID MSBが1であること 7 uint32送信元のシリアルID MSBが1であること 12 uint8センサー種別 0x80であること13 uint8PAL基板バージョンとPAL基板ID 0x83であること- - ペイロードのサイズ 188バイトであること
パーサの実装例 通知パル データ形式 # データ 内容 備考 charヘッダ :のみ0 uint32中継機のシリアルID 中継なしの場合80000000 4 uint8LQI 0-2555 uint16続き番号 7 uint32送信元のシリアルID 0x8???????11 uint8送信元の論理デバイスID 12 uint8センサー種別 0x80のみ13 uint8PAL基板バージョンとPAL基板ID 0x84のみ14 uint8センサーデータ の数3のみセンサーデータ1 15 uint8情報ビット 0x11のみ16 uint8データソース 0x30のみ17 uint8拡張バイト 0x08のみ18 uint8データ長 2のみ19 uint16データ 電源電圧(mV) センサーデータ2 21 uint8情報ビット 0x11のみ22 uint8データソース 0x30のみ23 uint8拡張バイト 0x01のみ24 uint8データ長 2のみ25 uint16データ ADC1の電圧(mV) センサーデータ3 27 uint8情報ビット 0x12のみ28 uint8データソース 0x05のみ29 uint8拡張バイト 0x04のみ30 uint8データ長 4のみ31 uint8データ 加速度イベントデータ 32 [uint8]未使用 センサーデータの末端 35 uint8チェックサム1 直前までのCRC8 uint8チェックサム2 チェックサム1までのLRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
出力データの例
:80000000C9BBC082014C3501808403 113008020D0C 1130010203F9 1205040410000000 97C6 # データ 内容 値 :charヘッダ :800000000 uint32中継機のシリアルID 中継なし C94 uint8LQI 201/255BBC05 uint16続き番号 4806482014C357 uint32送信元のシリアルID 0x2014C350111 uint8送信元の論理デバイスID 0x018012 uint8センサー種別 8413 uint8PAL基板バージョンとPAL基板ID 通知パルV1 0314 uint8センサーデータ の数3つセンサーデータ1 1115 uint8情報ビット 拡張バイトありuint16 3016 uint8データソース 電圧 0817 uint8拡張バイト 電源 0218 uint8データ長 2バイト0D0C19 uint16データ 3340mVセンサーデータ2 1121 uint8情報ビット 拡張バイトありuint16 3022 uint8データソース 電圧 0123 uint8拡張バイト ADC1 0224 uint8データ長 2バイト03F925 uint16データ 1017mVセンサーデータ3 1227 uint8情報ビット 拡張バイトありuint32 0528 uint8データソース イベント 0429 uint8拡張バイト 加速度イベント 0430 uint8データ長 4バイト1031 uint8データ ムーブ 00000032 [uint8]センサーデータの末端 9735 uint8チェックサム1 0x97C6uint8チェックサム2 0xC6charフッタ '\r'charフッタ '\n'
データの判別条件 親機・中継機アプリは、さまざまな種類の子機からデータを受信することができます。
出力されたデータがパルアプリ(通知パル)のものであるかを確認するには、次の箇所を参照してください。
# データ 項目 条件 0 uint32中継機のシリアルID MSBが1であること 7 uint32送信元のシリアルID MSBが1であること 12 uint8センサー種別 0x80であること13 uint8PAL基板バージョンとPAL基板ID 0x84であること- - ペイロードのサイズ 36バイトであること
1.3.3.1.1.1.1.4.2 - キューアプリからの出力(親機・中継機アプリ) キューアプリからデータを受信した際の出力書式
TWELITE CUE モード データ形式 出力データの例
:80000000CF7F7382019E3B0180050F003400038135001205040406000000113008020B8611300102042E000000018015044006FFF00010FC1815044106FFF00018FC1815044206FFF00010FC0015044306FFF80000FC1015044406FFF00010FC1815044506FFE00018FBF815044606FFE80000FC0015044706FFE80010FBF815044806FFE80010FC0815044906FFE80010FC080C0E # データ 内容 値 :charヘッダ :800000000 uint32中継機のシリアルID 中継なし CF4 uint8LQI 207/2557F735 uint16続き番号 32627 82019E3B7 uint32送信元のシリアルID 0x2019E3B0111 uint8送信元の論理デバイスID 0x018012 uint8センサー種別 0513 uint8PAL基板バージョンとPAL基板ID TWELITE CUE 0F14 uint8センサーデータ の数15個センサーデータ1 0015 uint8情報ビット 拡張バイトなしuint8 3416 uint8データソース パケットプロパティ 0017 uint8拡張バイト なし 0318 uint8データ長 3バイト81350019 [uint8]データ ID129、タイマイベント発生 センサーデータ2 1222 uint8情報ビット 拡張バイトありuint32 0523 uint8データソース イベント 0424 uint8拡張バイト 加速度イベント 0425 uint8データ長 4バイト0600000026 uint32データ サイコロ:6 センサーデータ3 1130 uint8情報ビット 拡張バイトありuint16 3031 uint8データソース 電圧 0832 uint8拡張バイト 電源電圧 0233 uint8データ長 2バイト0B8634 uint16データ 2950mVセンサーデータ4 1136 uint8情報ビット 拡張バイトありuint16 3037 uint8データソース 電圧 0138 uint8拡張バイト ADC1の電圧 0239 uint8データ長 2バイト042E40 uint16データ 1070mVセンサーデータ5 0042 uint8情報ビット 拡張バイトなしuint8 0043 uint8データソース 磁気 0044 uint8拡張バイト なし 0145 uint8データ長 1バイト8046 uint8データ 磁石なし(定期送信) センサーデータ6 1547 uint8情報ビット 拡張バイトありint16 0448 uint8データソース 加速度データ 4049 uint8拡張バイト 100Hz, 0番サンプル 0650 uint8データ長 6バイトFFF00010FC1851 [int16]データ X-16mG/Y16mG/Z-1000mG センサーデータ7 1557 uint8情報ビット 拡張バイトありint16 0458 uint8データソース 加速度データ 4159 uint8拡張バイト 100Hz, 1番サンプル 0660 uint8データ長 6バイトFFF00018FC1861 [int16]データ X-16mG/Y24mG/Z-1000mG センサーデータ8 <省略> センサーデータ15 15137 uint8情報ビット 拡張バイトありint16 04138 uint8データソース 加速度データ 49139 uint8拡張バイト 100Hz, 9番サンプル 06140 uint8データ長 6バイトFFE80010FC08141 int16データ X-24mG/Y16mG/Z-1016mG センサーデータの末端 0C147 uint8チェックサム1 0x0C0Euint8チェックサム2 0x0Echarフッタ '\r'charフッタ '\n'
データの判別条件 親機・中継機アプリは、さまざまな種類の子機からデータを受信することができます。
出力されたデータがキューアプリ(TWELITE CUEモード)のものであるかを確認するには、次の箇所を参照してください。
# データ 項目 条件 0 uint32中継機のシリアルID MSBが1であること 7 uint32送信元のシリアルID MSBが1であること 12 uint8センサー種別 0x80であること13 uint8PAL基板バージョンとPAL基板ID 0x05であること- - ペイロードのサイズ 148バイトであること
パーサの実装例 開閉センサーパルモード 動作センサーパルモード(加速度計測モード) 動作センサーパルモード(ムーブ/ダイスモード) データ形式 # データ 内容 備考 charヘッダ :のみ0 uint32中継機のシリアルID 中継なしの場合80000000 4 uint8LQI 0-2555 uint16続き番号 7 uint32送信元のシリアルID 0x8???????11 uint8送信元の論理デバイスID 12 uint8センサー種別 0x80のみ13 uint8PAL基板バージョンとPAL基板ID 0x03のみ14 uint8センサーデータ の数04のみセンサーデータ1 15 uint8情報ビット 0x00のみ16 uint8データソース 0x34のみ17 uint8拡張バイト 0x00のみ18 uint8データ長 3のみ19 [uint8]データ パケットプロパティデータ センサーデータ2 22 uint8情報ビット 0x12のみ23 uint8データソース 0x05のみ24 uint8拡張バイト 0x04のみ25 uint8データ長 4のみ26 uint32データ イベントデータ センサーデータ3 30 uint8情報ビット 0x11のみ31 uint8データソース 0x30のみ32 uint8拡張バイト 0x08のみ33 uint8データ長 2のみ34 uint16データ 電源電圧(mV) センサーデータ4 36 uint8情報ビット 0x11のみ37 uint8データソース 0x30のみ38 uint8拡張バイト 0x01のみ39 uint8データ長 2のみ40 uint16データ ADC1の電圧(mV) センサーデータの末端 42 uint8チェックサム1 直前までのCRC8 uint8チェックサム2 チェックサム1までのLRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
出力データの例 ダイスモードの例を示します。ムーブモードの場合は、センサーデータ2のイベント が異なります。
:80000000B400048106664801800304003400038035001205040403000000113008020D2011300102052C59B7 # データ 内容 値 :charヘッダ :800000000 uint32中継機のシリアルID 中継なし B14 uint8LQI 177/25500085 uint16続き番号 8 810666487 uint32送信元のシリアルID 0x2019E3B0111 uint8送信元の論理デバイスID 0x10666488012 uint8センサー種別 0313 uint8PAL基板バージョンとPAL基板ID TWELITE CUE ダイス/ムーブ 0414 uint8センサーデータ の数4つセンサーデータ1 0015 uint8情報ビット 拡張バイトなしuint8 3416 uint8データソース パケットプロパティ 0017 uint8拡張バイト なし 0318 uint8データ長 3バイト80350019 [uint8]データ ID128、イベント発生(他ADC1と電源のみ) センサーデータ2 1222 uint8情報ビット 拡張バイトありuint32 0523 uint8データソース イベント 0424 uint8拡張バイト 加速度イベント 0425 uint8データ長 4バイト0300000026 uint32データ ダイスモード、サイコロ:3 センサーデータ3 1130 uint8情報ビット 拡張バイトありuint16 3031 uint8データソース 電圧 0832 uint8拡張バイト 電源電圧 0233 uint8データ長 2バイト0D2034 uint16データ 3360mVセンサーデータ4 1136 uint8情報ビット 拡張バイトありuint16 3037 uint8データソース 電圧 0138 uint8拡張バイト ADC1の電圧 0239 uint8データ長 2バイト052C40 uint16データ 1324mVセンサーデータの末端 5942 uint8チェックサム1 0x0CB7uint8チェックサム2 0x0Echarフッタ '\r'charフッタ '\n'
データの判別条件 親機・中継機アプリは、さまざまな種類の子機からデータを受信することができます。
出力されたデータがキューアプリ(動作センサーパルモードのムーブあるいはダイスモード)のものであるかを確認するには、次の箇所を参照してください。
# データ 項目 条件 0 uint32中継機のシリアルID MSBが1であること 7 uint32送信元のシリアルID MSBが1であること 12 uint8センサー種別 0x80であること13 uint8PAL基板バージョンとPAL基板ID 0x03であること- - ペイロードのサイズ 43バイトであること
パーサの実装例 1.3.3.1.1.1.1.4.3 - アリアアプリからの出力(親機・中継機アプリ) アリアアプリからデータを受信した際の出力書式
TWELITE ARIA モード データ形式 出力データの例
:80000000CF00028201BAA201800607003400038135001205350401000000113008020D201130010204ED00000001800501000209D0010200020F347934[CR][LF] # データ 内容 値 :charヘッダ :800000000 uint32中継機のシリアルID 中継なし CF4 uint8LQI 207/25500025 uint16続き番号 2 8201BAA27 uint32送信元のシリアルID 0x201BAA20111 uint8送信元の論理デバイスID 0x018012 uint8センサー種別 0613 uint8PAL基板バージョンとPAL基板ID TWELITE ARIA 0714 uint8センサーデータ の数7つセンサーデータ1 0015 uint8情報ビット 拡張バイトなしuint8 3416 uint8データソース パケットプロパティ 0017 uint8拡張バイト なし 0318 uint8データ長 3バイト81350019 [uint8]データ ID129、タイマイベント発生 センサーデータ2 1222 uint8情報ビット 拡張バイトありuint32 0523 uint8データソース イベント 3524 uint8拡張バイト タイマイベント 0425 uint8データ長 4バイト0100000026 uint32データ タイマによる起床 センサーデータ3 1130 uint8情報ビット 拡張バイトありuint16 3031 uint8データソース 電圧 0832 uint8拡張バイト 電源電圧 0233 uint8データ長 2バイト0D2034 uint16データ 3360mVセンサーデータ4 1136 uint8情報ビット 拡張バイトありuint16 3037 uint8データソース 電圧 0138 uint8拡張バイト ADC1の電圧 0239 uint8データ長 2バイト04ED40 uint16データ 1261mVセンサーデータ5 0042 uint8情報ビット 拡張バイトなしuint8 0043 uint8データソース 磁気 0044 uint8拡張バイト なし 0145 uint8データ長 1バイト8046 uint8データ 磁石なし(定期送信) センサーデータ6 0547 uint8情報ビット 拡張バイトなしint16 0148 uint8データソース 温度 0049 uint8拡張バイト なし 0250 uint8データ長 2バイト09D051 int16データ 25.12°Cセンサーデータ7 0153 uint8情報ビット 拡張バイトなしuint16 0254 uint8データソース 湿度 0055 uint8拡張バイト なし 0256 uint8データ長 2バイト0F3457 uint16データ 38.92%センサーデータの末端 7959 uint8チェックサム1 0x7934uint8チェックサム2 0x34charフッタ '\r'charフッタ '\n'
データの判別条件 親機・中継機アプリは、さまざまな種類の子機からデータを受信することができます。
出力されたデータがアリアアプリ(TWELITE ARIAモード)のものであるかを確認するには、次の箇所を参照してください。
# データ 項目 条件 0 uint32中継機のシリアルID MSBが1であること 7 uint32送信元のシリアルID MSBが1であること 12 uint8センサー種別 0x80であること13 uint8PAL基板バージョンとPAL基板ID 0x06であること- - ペイロードのサイズ 60バイトであること
パーサの実装例 開閉センサーパルモード 1.3.3.1.1.1.1.4.4 - パル・キュー・アリアアプリからの出力の詳細(親機・中継機アプリ) パル・キュー・アリアアプリに共通する出力書式の詳細
パル・キュー・アリアアプリの子機から受信したデータは、共通の書式に沿って出力されます。ここには、その詳細を記しています。それぞれの具体的な出力例は、
各アプリのページ をご覧ください。
全体 データ形式 # データ 内容 備考 charヘッダ :のみ0 uint32中継機のシリアルID 中継なしの場合80000000 4 uint8LQI 0-2555 uint16続き番号 7 uint32送信元のシリアルID 0x8???????11 uint8送信元の論理デバイスID 12 uint8センサー種別 0x80のみ13 uint8PAL基板バージョンとPAL基板ID 0x81など14 uint8センサーデータ の数15 [uint8]センサーデータ の羅列長さ\(N\)のバイト列 15+\(N\) uint8チェックサム1 直前までのCRC8 uint8チェックサム2 チェックサム1までのLRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
出力データの例
:80000000A8001C82012B1E01808103113008020D0C1130010203E40000000101EC6E # データ 内容 値 :charヘッダ :800000000 uint32中継機のシリアルID 中継なし A84 uint8LQI 168/255001C5 uint16続き番号 2882012B1E7 uint32送信元のシリアルID 0x2012B1E0111 uint8送信元の論理デバイスID 0x018012 uint8センサー種別 - 8113 uint8PAL基板バージョンとPAL基板ID 0x810314 uint8センサーデータ の数3つ1130...010115 [uint8]センサーデータ の羅列長さ17のバイト列 EC15+17 uint8チェックサム1 0xEC6Euint8チェックサム2 0x6Echarフッタ '\r'charフッタ '\n'
センサーデータ データ形式 # データ 内容 備考 0 uint8情報ビット データの型や拡張バイトの有無 1 uint8データソース センサー値の種類 2 uint8拡張バイト センサー値の付加情報 3 uint8データ長 センサー値の長さ 4 [uint8]データ センサー値
出力データの例
情報ビット センサー値のデータ型や拡張バイトの有無、読み込みエラーの有無を示します。
bit 7 6 5 4 3 2 1 0 機能 ERR - - EXT - TYP:2 TYP:1 TYP:0
各機能は次の内容を示します。
機能 説明 値 内容 ERR 読み込みエラーの有無 0正常 1エラーあり EXT 拡張バイトの有無 0拡張バイトなし 1拡張バイトあり TYP データ型 000uint8001uint16010uint32011N/A 100int8101int16110int32111[uint8]
データソース センサー値の種類を示します。
値 内容 0x00磁気 0x01温度 0x02湿度 0x03照度 0x04加速度 0x05イベント 0x30電圧 0x34パケットプロパティ
拡張バイト 連続データのインデックスなど、センサー値の付加情報を示します。
データソースが磁気/温度/湿度/照度/パケットプロパティの場合 なし
データソースが加速度の場合 加速度サンプルデータの属性を示します。
bit 7 6 5 4 3 2 1 0 機能 SFQ:2 SFQ:1 SFQ:0 SNM:4 SNM:3 SNM:2 SNM:1 SNM:0
各機能は次の内容を示します。
機能 説明 値 内容 SFQ サンプリング周波数 000(0x00|SNM)25Hz 001(0x20|SNM)50Hz 010(0x40|SNM)100Hz 011(0x60|SNM)190Hz 100以上未定義 SNM サンプル番号 0-31古い順
データソースがイベントの場合 イベントの発生要因を示します。
値 内容 0x00磁気 0x01温度 0x02湿度 0x03照度 0x04加速度 0x31デジタル入力 0x35タイマ
データソースが電圧の場合 対象を示します。
値 内容 0x01ADC1 0x02ADC2 0x03ADC3 0x04ADC4 0x08電源
データ長 続くデータのバイト数を示します。
データ センサー値を表します。
データソースが磁気の場合 データ型はuint8です。
値 内容 0x00磁石なし 0x01N極が近づいた 0x02S極が近づいた 0x80磁石なし(定期送信) 0x81N極が近くにある(定期送信) 0x82S極が近くにある(定期送信)
データソースが温度の場合 データ型はint16です。
100倍されたセ氏の温度を表します。
データソースが湿度の場合 データ型はuint16です。
100倍された相対湿度を表します。
データソースが照度の場合 データ型はuint32です。
ルクスの値を表します。
データソースが加速度の場合 int16のデータが3つ続きます。
X,Y,Z軸の値(mG)の合計は6バイトです。
byte 0 1 2 3 4 5 内容 X:15-8 X:7-0 Y:15-8 Y:7-0 Z:15-8 Z:7-0
データソースがイベントの場合 uint8のデータが4つ続きます。
先頭のデータがイベントの内容を表し、残りは未使用です。
拡張バイトが磁気の場合 先頭の値 内容 0x00磁石なし 0x01N極が近くにある 0x02S極が近くにある
拡張バイトが加速度の場合 先頭の値 内容 0x00静止(ムーブモード) 0x01サイコロ:1 0x02サイコロ:2 0x03サイコロ:3 0x04サイコロ:4 0x05サイコロ:5 0x06サイコロ:6 0x08シェイク 0x10ムーブ
拡張バイトがタイマの場合 データソースが電圧の場合 データ型はuint16です。
mV単位の電圧を表します。
データソースがパケットプロパティの場合 uint8のデータが3つ続きます。
byte 0 1 2 データ パケットID 起床要因の根源 起床要因の条件
各データは次の内容を表します。
データ 値 内容 パケットID 0イベントなし、ADC1と電源の電圧のみ 1-127イベントなし、その他のデータあり 128イベントあり、ADC1と電源の電圧のみ 129-255イベントあり、その他のデータあり 起床要因の根源 0x00磁気 0x01温度 0x02湿度 0x03照度 0x04加速度 0x31デジタル入力 0x35タイマ 起床要因の条件 0x00イベントが発生した 0x01値が変化した 0x02値がしきい値を上回った 0x03値がしきい値を下回った 0x04値が範囲を満たした
1.3.3.1.1.1.1.5 - actからの出力(親機・中継機アプリ) act からデータを受信した際の出力書式
act から受信したデータ データ形式 # データ 内容 備考 charヘッダ :のみ0 uint8送信元の論理デバイスID 1 uint8コマンド種別 0xAAのみ2 uint8応答ID 0x00-0x7F3 uint32送信元のシリアルID 7 uint32送信先のシリアルID 論理デバイスID指定時は00000000 11 uint8LQI 0-25512 uint16データのバイト数 14 [uint8]任意のデータ 長さ\(N\)のバイト列 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
出力データの例
:FEAA008201015A00000000B7000F424154310F0CEE000B03FF03FF03FF92 # データ 内容 値 :charヘッダ :FE0 uint8送信元の論理デバイスID 0xFEAA1 uint8コマンド種別 0xAA002 uint8応答ID 0x008201015A3 uint32送信元のシリアルID 0x201015A000000007 uint32送信先のシリアルID 論理デバイスID指定 B711 uint8LQI 183/255000F12 uint16データのバイト数 15バイト424154310F0CEE000B03FF03FF03FF14 [uint8]任意のデータ そのまま 92uint8チェックサム 0x92charフッタ \rcharフッタ \n
1.3.3.1.1.1.1.6 - 無線タグアプリからの出力(親機・中継機アプリ) 無線タグアプリからデータを受信した際の出力書式
子機へ主なセンサーを接続した際の出力を記載します。
アナログセンサー データ形式 # データ 内容 備考 charヘッダ :のみ0 uint32中継機のシリアルID 中継なしは80000000 4 uint8LQI 0-2555 uint16続き番号 7 uint32送信元のシリアルID 11 uint8送信元の論理デバイスID 12 uint8センサー種別 13 uint8電源電圧(mV) 電源電圧の計算 を参照14 uint16ADC1の電圧 16 uint16ADC2の電圧 18 uint32未使用 22 uint8チェックサム
出力データの例
:80000000B700628201015A0010DF08FD09A300000000E9 # データ 内容 値 :charヘッダ :800000000 uint32中継機のシリアルID 中継なし B74 uint8LQI 183/25500625 uint16続き番号 988201015A7 uint32送信元のシリアルID 0x201015A0011 uint8送信元の論理デバイスID 0x001012 uint8センサー種別 アナログセンサー DF13 uint8電源電圧(mV) 3330mV08FD14 uint16ADC1の電圧 2301mV09A316 uint16ADC2の電圧 2467mV0000000018 uint32未使用 E922 uint8チェックサム 0xE9charフッタ \rcharフッタ \n
加速度センサー(ADXL34x / TWELITE 2525A) データ形式 # データ 内容 備考 charヘッダ :のみ0 uint32中継機のシリアルID 中継なしは80000000 4 uint8LQI 0-2555 uint16続き番号 7 uint32送信元のシリアルID 11 uint8送信元の論理デバイスID 12 uint8センサー種別 13 uint8電源電圧(mV) 電源電圧の計算 を参照14 uint16ADC1の電圧 16 uint16ADC2の電圧 18 uint8センサーモード番号 19 int16X軸の加速度 単位はmG*10 21 int16Y軸の加速度 単位はmG*10 23 int16Z軸の加速度 単位はmG*10 25 uint8チェックサム
出力データの例
:8000000063001781013C850035DF057702F2000000FF96FFF0BB # データ 内容 値 :charヘッダ :800000000 uint32中継機のシリアルID 中継なし 634 uint8LQI 99/25500175 uint16続き番号 2381013C857 uint32送信元のシリアルID 0x1013C850011 uint8送信元の論理デバイスID 0x003512 uint8センサー種別 加速度センサー(ADXL34x) DF13 uint8電源電圧(mV) 3330mV057714 uint16ADC1の電圧 1399mV02F216 uint16ADC2の電圧 754mV0018 uint8センサーモード番号 通常 000019 int16X軸の加速度 0mGFF9621 int16Y軸の加速度 -1060mGFFF023 int16Z軸の加速度 -160mGBB25 uint8チェックサム 0xBBcharフッタ \rcharフッタ \n
スイッチ データ形式 # データ 内容 備考 charヘッダ :のみ0 uint32中継機のシリアルID 中継なしは80000000 4 uint8LQI 0-2555 uint16続き番号 7 uint32送信元のシリアルID 11 uint8送信元の論理デバイスID 12 uint8センサー種別 13 uint8電源電圧(mV) 電源電圧の計算 を参照14 uint16ADC1の電圧 16 uint16ADC2の電圧 18 uint8センサーモード番号 0がHi→Lo、1がLo→Hi19 uint8DI1の状態1がLo20 uint8未使用 21 uint8チェックサム
出力データの例
:800000009C00118201015A00FEDF000709A300010064
# データ 内容 値 :charヘッダ 800000000 uint32中継機のシリアルID 中継なし 9C4 uint8LQI 156/25500625 uint16続き番号 988201015A7 uint32送信元のシリアルID 0x201015A0011 uint8送信元の論理デバイスID 0x00FE12 uint8センサー種別 スイッチ DF13 uint8電源電圧(mV) 3330mV000714 uint16ADC1の電圧 7mV09A316 uint16ADC2の電圧 2467mV0018 uint8センサーモード番号 Hi→Lo 0119 uint8DI1の状態Lo 0020 uint8未使用 6421 uint8チェックサム 0x64charフッタ \rcharフッタ \n
電源電圧の計算 電源電圧 \(V_{cc}\) は、受信した値 \(e_{cc}\) を使って次のように表すことができます。
$$\begin{cases}
V_{cc} = 1950+5e_{cc} & (e_{cc} <= 170) \\
V_{cc} = 2800+10(e_{cc}-170) & (e_{cc} > 170)
\end{cases}$$
単位は mV
1.3.3.1.1.1.2 - 親機・中継機アプリの送信コマンド 子機へデータを送信する際の入力
既定の書式でシリアルポートから入力されたコマンドを子機へ送信します。
1.3.3.1.1.1.2.1 - 超簡単!標準アプリへの入力(親機・中継機アプリ) 超簡単!標準アプリの出力を制御するためのコマンド
超簡単!標準アプリの出力を制御できます。
デジタル・アナログ入出力 0x80:相手端末の出力変更相手端末の出力信号を制御します。
データ形式 # データ 内容 備考 charヘッダ :のみ0 uint8送信先の論理デバイスID 親機0x00,子機0x01-0x64,全子機0x78 1 uint8コマンド番号 0x80のみ2 uint8書式バージョン 0x01のみ3 uint8デジタル信号 LSBからDOxに対応、0でHigh 4 uint8デジタル信号マスク LSBからDOxに対応、1で有効 5 uint16PWM1信号0-1024,0xFFFFで無効7 uint16PWM2信号0-1024,0xFFFFで無効9 uint16PWM3信号0-1024,0xFFFFで無効11 uint16PWM4信号0-1024,0xFFFFで無効uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
1.3.3.1.1.1.2.2 - シリアル通信アプリへの入力(親機・中継機アプリ) シリアル通信アプリへデータを送信するコマンド
シリアル通信アプリの子機へデータを送信できます(書式モード、簡易形式)
UART 書式モード:アスキー・簡易形式 App_Wings v1.3 以降では、書式モード(A)の簡易形式に対応しています。
2024年9月現在、公開中の SDK に App_Wings v1.3 は含まれていません。
次のリンクから App_Wings v1.3 をダウンロードし、ファイルを指定して書き込む ことで使用できます。
データ形式 # データ 内容 備考 charヘッダ :のみ0 uint8送信先の論理デバイスID 親機0x00,子機0x01-0x64,全子機0x78 1 uint8コマンド番号 0x80未満の任意の値2 [uint8]任意のデータ 長さ\(N\)のバイト列(\(N\leqq80\)を推奨) uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
1.3.3.1.1.1.2.3 - リモコンアプリへの入力(親機・中継機アプリ) リモコンアプリの出力を制御するためのコマンド
v1.3 以降では、リモコンアプリの出力を制御できます。
リモコンアプリ(App_IO)の UART 機能で使用するデータ形式を解説します。
デジタル入出力 0x81:相手端末からの状態通知受信した入力信号の状態を出力します。
データ形式 # データ 内容 備考 charヘッダ :のみ0 uint8送信元の論理デバイスID 1 uint8コマンド番号 0x81のみ2 uint8パケット識別子 0x0Fのみ3 uint8プロトコルバージョン 0x01のみ4 uint8LQI 0-2555 uint32送信元のシリアルID 0x8???????9 uint8送信先の論理デバイスID 10 uint16タイムスタンプ 1秒で64カウント、MSBは内部フラグ 12 uint8中継回数 13 uint16デジタル信号 LSBから順にIxへ対応、0がHigh 15 uint16デジタル信号マスク LSBから順にIxへ対応、1なら有効 17 uint16デジタル信号フラグ LSBから順にIxへ対応、1なら割り込み 19 uint8未使用 内部管理用 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
出力データの例
:01810F01DB8630000200645F000040004F00400049
上記データの解釈 # データ 内容 値 :charヘッダ :010 uint8送信元の論理デバイスID 0x78811 uint8コマンド番号 0x810F2 uint8パケット識別子 0x15013 uint8プロトコルバージョン 0x01DB4 uint8LQI 219/255863000025 uint32送信元のシリアルID 0x6300002009 uint8送信先の論理デバイスID 0x00645F10 uint16タイムスタンプ 約401秒 0012 uint8中継回数 0004013 uint16デジタル信号 I7がLo004F15 uint16デジタル信号マスク I7,I1-I4が有効004017 uint16デジタル信号フラグ I7は割り込みにより変化0019 uint8未使用 49uint8チェックサム 0x49charフッタ \rcharフッタ \n
0x80:相手端末の出力変更相手端末の出力信号を制御します。
データ形式 # データ 内容 備考 charヘッダ :のみ0 uint8送信先の論理デバイスID 親機0x00,子機0x01-0x64,全子機0x78 1 uint8コマンド番号 0x80のみ2 uint8書式バージョン 0x01のみ3 uint16デジタル信号 LSBからOxに対応、0でHigh 5 uint16デジタル信号マスク LSBからOxに対応、1で有効 7 uint16未使用 09 uint16未使用 011 uint16未使用 013 uint16未使用 0uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
1.3.3.1.1.1.2.4 - パルアプリ(通知パル)への入力(親機・中継機アプリ) 通知パルのLEDを制御するためのコマンド
通知パルのLEDを制御できます。
:0190010004000169[CR][LF]
^1^2^3^^^^^^^4^5
番号 バイト数 意味 データ例 備考 1 1 送信先の論理デバイスID 01 送信先のTWELITE PALの論理デバイスIDを指定します。
2 1 コマンド種別 90 3 1 コマンドパラメータ数 01 コマンドパラメータの数を指定します。例えば、コマンドパラメータを1つだけ指定するなら1に、2つ指定するには2にします。 4 コマンド数x4 コマンドパラメータ 00040001 イベントやLEDの色などを指定するためのパラメータを指定します。
5 1 チェックサム 69 1~4の各バイトの和を8ビット幅で計算し2の補数をとります。つまりデータ部の各バイトの総和+チェックサムバイトを8ビット幅で計算すると0になります。
6 2 フッター [CR][LF] [CR] (0x0D) [LF] (0x0A) を指定します。ただし、チェックサムをXで省略する場合はフッターも省略可能です。
コマンドパラメータ 4バイトのコマンドパラメータを組み合わせてコマンドを指定します。
0x00:イベントIDを送信する TWELITE PALは受信したイベントIDごとの振る舞いが設定されております。 本パラメータでは送信先のTWELITE PALにイベントIDを送信し、設定した動作を行います。
イベント毎の振る舞いを変更するにはTWELITE PALの設定を変更してください。
番号 バイト数 内容 備考 1 1 コマンドパラメータID 0x00 2 1 送信先PAL ID 送信先のPAL IDを指定します。
3 1 未使用領域 0x00固定 4 1 イベントID 0~16までのイベントIDを指定します。
0x01 : LEDの色、点滅パターン、明るさを送信する 送信先の通知パルにLEDの色、点滅パターン、明るさを送信します。
番号 バイト数 内容 備考 1 1 コマンドパラメータID 0x01 2 1 色
0:赤
3 1 点滅パターン 0:常時点灯
4 1 明るさ 0:消灯
0x02 : 点灯時間を送信する 通知パルのLEDの点灯時間を送信します。
本コマンドパラメータは、LEDの色、点滅パターン、明るさのパラメータが含まれないので、コマンドパラメータ0x01または0x03と組み合わせて使用します。
本コマンドパラメータを使用する場合は、送信間隔を必ず点灯時間より大きく設定してご使用ください。
番号 バイト数 内容 備考 1 1 コマンドパラメータID 0x02 2 1 未使用領域
0xFF固定 3 1 未使用領域 0x00固定 4 1 点灯時間 秒で指定(0は常時点灯)
0x03:LEDの色をRGBWで指定する 通知パルのLEDの点灯色をRGBWで送信します。
コマンドパラメータ0x00および0x01とは同時に使用できません。
番号 バイト数 内容 備考 1 1 コマンドパラメータID 0x03 2 1 未使用領域
0xFF固定 3 2 LEDの点灯色 LSBからRGBWの順番で4ビットずつ指定する。
数値が大きいほど明るい
0x04:点滅パラメータを指定する。 通知パルのLEDの点滅周期と点滅Dutyを送信します。
本コマンドパラメータは、LEDの色のパラメータが含まれないので、コマンドパラメータ0x03と組み合わせて使用します。
コマンドパラメータ0x00および0x01とは同時に使用できません。
番号 バイト数 内容 備考 1 1 コマンドパラメータID 0x04 2 1 未使用領域
0xFF固定 3 1 点滅時間の割合 0x00~0xFFで指定する。
数値が大きいほど1周期当たりの点灯時間が長くなる。
1周期の半分だけ点灯させるには0x7Fを指定する。
4 1 点滅周期 0x00~0xFFで指定する。
設定値が1大きくなるごとに点滅の周期が約0.04sずつ増える。
1周期1秒にするには0x17を指定する。
コマンド例 例1:イベントを送信する 論理デバイスIDが1のNOTICE PALに対してイベント1を送信するコマンド例です。
:0190010004000169
^1^2^3^4^5^6^7^8
番号 バイト数 意味 データ例 データ例の内容 備考 1 1 送信先の論理デバイスID 01 送信先の論理デバイスIDは0x01 2 1 コマンド種別 90 0x90コマンド 90固定 3 1 コマンド数 01 コマンドは1個 4 1 コマンドID 00 コマンド00 5 1 送信先PAL ID 04 通知パルに対して送信する 6 1 未使用領域 00 7 1 イベントID 01 イベント1 0x00~0x10まで 8 1 チェックサム 69
例2:通知パルのLEDの点灯色を送信する 論理デバイスIDが1のNOTICE PALに対して明るさ8で白色にゆっくり点滅させるためのコマンドです。
:019001010601085E
^1^2^3^4^5^6^7^8
番号 バイト数 意味 データ例 データ例の内容 備考 1 1 送信先の論理デバイスID 01 送信先の論理デバイスIDは0x01 2 1 コマンド種別 90 0x90コマンド 90固定 3 1 コマンド数 01 コマンドは1個 4 1 コマンドパラメータID 01 コマンドパラメータID 0x01 5 1 色 06 白 6 1 点滅パターン 01 点滅 7 1 明るさ 08 明るさ8 0x00~0x0Fまで 8 1 チェックサム 5E
例3:通知パルのLEDの点灯色と点灯時間を送信する 論理デバイスIDが1のNOTICE PALに対して紫に点灯させ、点灯後1秒で消灯させるコマンドです。
本コマンドを試す場合、送信間隔を必ず点灯時間より大きく設定してご使用ください。
:0190020104000802FF00015E
^1^2^3^4^5^6^7^8^9^a^b^c
番号 バイト数 意味 データ例 データ例の内容 備考 1 1 送信先の論理デバイスID 01 送信先の論理デバイスIDは0x01 2 1 コマンド種別 90 0x90コマンド 90固定 3 1 コマンド数 02 コマンドは2個 4 1 コマンドパラメータID 01 コマンドパラメータID 0x01 5 1 色 04 紫 6 1 点滅パターン 00 点灯 7 1 明るさ 08 明るさ8 0x00~0x0Fまで 8 1 コマンドパラメータID 02 コマンドパラメータID 0x02 9 1 未使用領域 FF a 1 未使用領域 00 b 1 点灯時間 01 点灯後1秒で消える c 1 チェックサム 5E
例4:通知パルに詳細な点灯色を送信する 論理デバイスIDが1のNOTICE PALに対して紫に点灯させるコマンドです。
:01900103FF0F0459
^1^2^3^4^5^^^6^7
番号 バイト数 意味 データ例 データ例の内容 備考 1 1 送信先の論理デバイスID 01 送信先の論理デバイスIDは0x01 2 1 コマンド種別 90 0x90コマンド 90固定 3 1 コマンド数 01 コマンドは2個 4 1 コマンドパラメータID 03 コマンドパラメータID 0x03 5 1 未使用 FF 6 2 LEDの点灯色 0F04 青:15、赤4の明るさで点灯させる。 LSBからRGBWの順番で各色4bitずつ(0~15)で指定する。
数値が大きいほど明るい
7 1 チェックサム 59
例5:通知パルのLEDの点灯色と点灯時間を送信する 論理デバイスIDが1のNOTICE PALに対して紫に点灯させ、点灯後1秒で消灯させるコマンドです。
本コマンドを試す場合、送信間隔を必ず点灯時間より大きく設定してご使用ください。
:0190020104000802FF00015E
^1^2^3^4^5^6^7^8^9^a^b^c
番号 バイト数 意味 データ例 データ例の内容 備考 1 1 送信先の論理デバイスID 01 送信先の論理デバイスIDは0x01 2 1 コマンド種別 90 0x90コマンド 90固定 3 1 コマンド数 02 コマンドは2個 4 1 コマンドパラメータID 01 コマンドパラメータID 0x01 5 1 色 04 紫 6 1 点滅パターン 00 点灯 7 1 明るさ 08 明るさ8 0x00~0x0Fまで 8 1 コマンドパラメータID 02 コマンドパラメータID 0x02 9 1 未使用領域 FF a 1 未使用領域 00 b 1 点灯時間 01 点灯後1秒で消える c 1 チェックサム 5E
1.3.3.1.1.2 - 親機・中継機アプリの中継機モード 子機や親機から受信したデータを再送信する
中継機モードでは、受信したパケットを再送信することで、子機と親機の通信距離を延ばすことができます。
中継したとき、親機が受信するパケットの順番が入れ替わってしまうことがあります。
100ms程度など短い間隔で連続的に送信する子機がいる際には、中継が間に合わない場合があります。本番環境でよく検証のうえご利用ください。
設定例 中継機として使用するには、インタラクティブモードの動作モード を1以上としてください。
中継方式 TWELITE NETでは無線パケットの中継配送について、大きく分けて下表で示す2つの方式を用意しており、アプリケーションごとに異なります。本アプリでは下表で示すアプリケーションのパケットを識別し、中継することができます。
中継方式 対応アプリ 単純ネット 超簡単!標準アプリ、リモコンアプリ、シリアル通信アプリ、アクト 中継ネット 無線タグアプリ、パルアプリ、キューアプリ
単純ネットを使用した中継 単純ネットを使用するアプリの中継を行う場合、動作モードの値を1以上に設定することで3回まで中継することができます。
例えば、1. のように親機と子機の間に中継機が3台以内であれば親機にデータが届きますが、2. ように中継機が4台以上ある場合は親機にデータが届きません。
1. 子機 ---> 中継機 ---> 中継機 ---> 中継機 ---> 親機
→ 親機が子機のデータを3回中継して受信できる。
2. 子機 ---> 中継機 ---> 中継機 ---> 中継機 ---> 中継機 -x-> 親機\
→ 中継4回目で中継することをやめる。
単純ネットによる中継は、基本的に同報通信を使用して通信を行い、受信したパケットをすべて中継を行います。そのため、中継ネットワークを形成、維持するための通信が必要ないという利点がありますが、中継機が増えるほど爆発的に通信量が多くなることがあるという欠点もあります。
詳しくは こちら を参照ください。
中継ネットを使用した中継 中継ネットを使用するアプリのデータを1段の中継を行う場合、動作モードの値を1に設定してしてください。
複数回の中継を行う場合は、親機から遠くなるにつれて動作モードの設定値を大きくしてください。(設定値が昇順になっていれば設定値が飛んでもかまいません。)
本方式の最大中継回数は63回までです。
例1:1回の中継を行う場合\
子機 ---> 中継機(動作モード:1) ---> 親機
例2:2回の中継を行う場合\
子機 ---> 中継機(動作モード:2) ---> 中継機(動作モード:**1**) ---> 親機
例3:3回の中継を行う場合\
子機 ---> 中継機(動作モード:6) ---> 中継機(動作モード:3) ---> 中継機(動作モード:1) ---> 親機
中継ネットは上り方向の配送を効率的に実施する目的を持って設計されたツリー型ネットワークで、中継機は上位レイヤ(より動作モードの設定値が小さい親機もしくは中継機)を探索し、発見した上位レイヤ1台に対して中継を行います。
そのため、中継機の台数が増えても単純ネットほどは通信量が多くなりにくいですが、接続先を探索、維持するための通信が発生します。
詳しくは こちら をご覧ください。
静的ルーティング(中継先を直接指定)をする場合 中継ネットでの中継を行うときに、下図のような配置を考えた場合、中継機2の接続先は親機もしくは中継機1のどちらかを自動的に選択します。
基本的には、中継する回数が少ない方が親機への配送率が高くなる場合が多いですが、中継機2の接続先として親機が選択されてしまった場合、親機と中継機2の間に障害物があるため、通信品質が悪くなり、親機への配送率が中継機1を経由するときより低くなる可能性が高くなります。
そのため、本アプリには中継機の接続先を TWELITE のシリアル番号で指定する機能 (静的ルーティング機能) があります。
静的ルーティングを行う場合は、中継機2→中継機1への経路を静的にする、または全ての経路を静的に設定します。
すべての経路の設定にはその分だけ設定が多くなり、また、中継機の故障や電波状況の変化といった状況を想定した冗長化に対応できない点がありますが、上位通信先を確定するまでの時間をなくし、速やかに中継動作に移行できる利点があります。
静的ルーティングをするには下表のように中継機1には親機のSID、中継機2には中継機1のSIDになるように接続先を設定してください。
例: 2段中継の場合 (親機 ← 中継機1 ← 中継機2 ← 子機)
TWELITEのSID例 接続先(A: Access Point Address)の設定例 動作モード(l:Mode)の設定例 親機 810F155E - 0 中継機1 810E18E8 810F155E (親機のSID)※ 1 中継機2 810F17FF 810E18E8 (中継機1のSID) 2
※上図の壁による影響のみに対処したい場合は設定不要です。
1.3.3.1.2 - インタラクティブモード(親機・中継機アプリ) インタラクティブモードによる詳細な設定変更
インタラクティブモードでアプリの詳細設定を行うことができます。
ここでは親機・中継機アプリ(App_Wings)に固有の機能を説明します。共通機能については、TWELITE APPS マニュアル のトップページ を参照してください。
表示例 次のような画面を表示します。
[CONFIG MENU/App_Wings:ROUTER:0/v1-03-2/SID=8300051A]
a: (0x67720102) アプリケーションID [HEX:32bit]
c: (18 ) 周波数チャネル(複数可) [11-26]
x: ( 0x03) 送信出力と再送回数 [HEX:8bit]
b: (115200,8N1) UART代替ボーレート [XXXXX]
o: (0x00000001) オプションビット [HEX:32bit]
t: (0xA5A5A5A5) 暗号鍵 [HEX:32bit]
m: ( 1) 動作モード [1,2-63]
A: (0x00000000) 中継先 [HEX:32bit]
[ESC]:Exit [!]:Reset System [*]:Extr Menu [:]:AppSel ※ m Aは中継機のみ
コマンド 各コマンドの詳細を次に示します。
a:アプリケーションID通信を行う端末はすべて同一の値とします。論理的にネットワークを分離します。
c:周波数チャネル通信を行う端末はすべて同一の値とします。物理的にネットワークを分離します。
x:送信出力と再送回数電波の送信出力と、パケットを追加で送信する回数を指定します。
b:UART代替設定オプションビットのUART代替設定の有効化 を設定した場合のUARTオプションを指定します。
代替設定のボーレートを9600/19200/38400/57600/115200/230400から選択できます。
オプションとして、カンマに続けて Bit-Parity-Stop 3文字を指定できます。
o:オプションビット32bit の数値を指定します。各ビットに紐付いた設定を有効化できます。
k:暗号化鍵オプションビットの暗号化通信の有効化 を設定した場合の暗号化鍵を32bitの16進数で指定します。
m:動作モード0は親機モード、1は中継機モードへ設定します。
中継機モードで多段中継を行う ときには、2-63とすることで中継機のレイヤを指定できます。
A:中継先中継機モードで静的ルーティングを行う ときに接続する上位段の端末のシリアルID(0x8???????)を指定します。このとき、0x00000000とした場合は自動検索します。
オプションビットの詳細 オプションビットの値の各ビットに紐付いた設定を解説します。
00000200:UART代替設定の有効化b:UART代替設定
00000400:定期送信パケットの出力を停止超簡単!標準アプリとリモコンアプリの1秒毎の定期送信と連続モード時のUART出力を停止します。
00001000:暗号化通信の有効化暗号化通信を有効にします。相手側の暗号化通信も有効化する必要があります。
00002000:暗号化通信時の平文受信を有効化暗号化通信を有効とした際に、暗号化していないパケットも受信するようにします。
00010000:LEDを無効化TWELITE STICK や MONOSTICK のLEDを点灯しません。
00020000:待機時にLEDを無効化待機時にTWELITE STICK や MONOSTICK のLEDを点灯しません。
1.3.3.2 - 親機・中継機アプリ マニュアル v1.2.1 BLUE/RED 安定版
TWELITE APPS や act の子機に対する親機や中継機として働きます。
機能 TWELITE APPSとactの全てのデータパケットを処理することができ、共通の親機または中継機として使用できます。
超簡単!標準アプリやパル専用アプリなどの TWELITE APPS や act のデータを1つの MONOSTICK で収集可能 16チャンネルで複数システムを個別に運用可能 アプリケーションIDの設定することで、同一チャネルに複数システムを混在可能 中継機能で通信範囲拡大 1.3.3.2.1 - 親機・中継機アプリの動作モード 親機・中継機アプリの動作モード
親機モードと中継機モードの2つのモードがあります。
1.3.3.2.1.1 - 親機・中継機アプリの親機モード 子機からデータを受信、子機へデータを送信する
子機から送信されたデータを受信し、シリアルポートから出力します。また、シリアルポートへ入力されたコマンドを子機へ送信します。
1.3.3.2.1.1.1 - 親機・中継機アプリの受信メッセージ 子機からデータを受信した際の出力
子機から送信されたデータを受信し、既定の書式でシリアルポートから出力します。
1.3.3.2.1.1.1.1 - 超簡単!標準アプリからの出力(親機・中継機アプリ) 超簡単!標準アプリからデータを受信した際の出力書式
0x81:相手端末からの状態通知受信した入力信号の状態を出力します。
データ形式 # データ 内容 備考 charヘッダ :のみ0 uint8送信元の論理デバイスID 1 uint8コマンド番号 0x81のみ2 uint8パケット識別子 アプリケーションIDより生成 3 uint8プロトコルバージョン 0x01のみ4 uint8LQI 0-2555 uint32送信元のシリアルID 0x8???????9 uint8送信先の論理デバイスID 10 uint16タイムスタンプ 1秒で64カウント 12 uint8中継回数 13 uint16電源電圧 単位はmV 15 int8- (未使用) 16 uint8デジタル信号 LSBから順にDIxへ対応、0がHigh1なら定期送信 17 uint8デジタル信号マスク LSBから順にDIxへ対応、1が有効 18 uint8AI1の変換値アナログ信号の計算 を参照、0xFFで未使用19 uint8AI2の変換値アナログ信号の計算 を参照、0xFFで未使用20 uint8AI3の変換値アナログ信号の計算 を参照、0xFFで未使用21 uint8AI4の変換値アナログ信号の計算 を参照、0xFFで未使用22 uint8AIxの補正値LSBから2ビットずつ順にAIxへ対応 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
アナログ信号の計算 AIxの入力電圧 \(V\)は、受信した変換値\(e_{r}\)および補正値\(e_{fr}\)を使って次のように表すことができます。
$$\begin{align*}
V &= e+e_f \\
\text{where} \\
e &= 16e_r \\
e_f &= 4e_{fr} \\
\end{align*}$$
単位は mV
出力データの例
:78811501C98201015A000391000C2E00810301FFFFFFFFFB # データ 内容 値 :charヘッダ :780 uint8送信元の論理デバイスID 0x78811 uint8コマンド番号 0x81152 uint8パケット識別子 0x15013 uint8プロトコルバージョン 0x01C94 uint8LQI 201/2558201015A5 uint32送信元のシリアルID 0x201015A009 uint8送信先の論理デバイスID 0x00039110 uint16タイムスタンプ 約14.27秒 0012 uint8中継回数 00C2E13 uint16電源電圧 3118mV0015 int8- 8116 uint8デジタル信号 DI1 L DI2 HDI3 H DI4 H0317 uint8デジタル信号マスク DI1 DI20118 uint8AI1の変換値16mVFF19 uint8AI2の変換値未使用 FF20 uint8AI3の変換値未使用 FF21 uint8AI4の変換値未使用 FF22 uint8AIxの補正値AI1 0x03FBuint8チェックサム 0xFBcharフッタ \rcharフッタ \n
データの判別条件 親機・中継機アプリは、さまざまな種類の子機からデータを受信することができます。
出力されたデータが超簡単!標準アプリのものであるかを確認するには、次の箇所を参照してください。
# データ 項目 条件 1 uint8コマンド番号 0x81であること3 uint8プロトコルバージョン 0x01であること5 uint32送信元のシリアルID MSBが1であること(0x8???????) - - ペイロードのサイズ 23バイトであること(:とチェックサムの間)
パーサの実装例 0x01:任意のデータの受信データ形式 # データ 内容 備考 charヘッダ :のみ0 uint8送信元の論理デバイスID 親機0x00,子機0x01-0x64,未設定子機0x78 1 uint8コマンド番号 0x01のみ2 [uint8]任意のデータ 長さ\(N\)のバイト列 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
1.3.3.2.1.1.1.2 - リモコンアプリからの出力(親機・中継機アプリ) リモコンアプリからデータを受信した際の出力書式
0x81:相手端末からの状態通知受信した入力信号の状態を出力します。
データ形式 # データ 内容 備考 charヘッダ :のみ0 uint8送信元の論理デバイスID 1 uint8コマンド番号 0x81のみ2 uint8パケット識別子 0x0Fのみ3 uint8プロトコルバージョン 0x01のみ4 uint8LQI 0-2555 uint32送信元のシリアルID 0x8???????9 uint8送信先の論理デバイスID 10 uint16タイムスタンプ 1秒で64カウント、MSBは内部フラグ 12 uint8中継回数 13 uint16デジタル信号 LSBから順にIxへ対応、0がHigh 15 uint16デジタル信号マスク LSBから順にIxへ対応、1なら有効 17 uint16デジタル信号フラグ LSBから順にIxへ対応、1なら割り込み 19 uint8未使用 内部管理用 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
出力データの例
:01810F01DB8630000200645F000040004F00400049 # データ 内容 値 :charヘッダ :010 uint8送信元の論理デバイスID 0x78811 uint8コマンド番号 0x810F2 uint8パケット識別子 0x15013 uint8プロトコルバージョン 0x01DB4 uint8LQI 219/255863000025 uint32送信元のシリアルID 0x6300002009 uint8送信先の論理デバイスID 0x00645F10 uint16タイムスタンプ 約401秒 0012 uint8中継回数 0004013 uint16デジタル信号 I7がLo004F15 uint16デジタル信号マスク I7,I1-I4が有効004017 uint16デジタル信号フラグ I7は割り込みにより変化0019 uint8未使用 49uint8チェックサム 0x49charフッタ \rcharフッタ \n
データの判別条件 親機・中継機アプリは、さまざまな種類の子機からデータを受信することができます。
出力されたデータがリモコンアプリのものであるかを確認するには、次の箇所を参照してください。
# データ 項目 条件 1 uint8コマンド番号 0x81であること3 uint8プロトコルバージョン 0x02であること5 uint32送信元のシリアルID MSBが1であること(0x8???????) - - ペイロードのサイズ 20バイトであること(:とチェックサムの間)
パーサの実装例 1.3.3.2.1.1.1.3 - シリアル通信アプリからの出力(親機・中継機アプリ) シリアル通信アプリからデータを受信した際の出力書式
本アプリでは、書式モードの電文のみ受信できます。
透過モードやチャットモードのパケットを受信した場合の出力は未定義ですから、ご注意ください。
書式モード:簡易形式 データ形式 # データ 内容 備考 charヘッダ :のみ0 uint8送信元の論理デバイスID 親機0x00,子機0x01-0x64,未設定子機0x78 1 uint8コマンド番号 送信側で指定した0x80未満の値 2 [uint8]任意のデータ 長さ\(N\)のバイト列 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
出力データの例
# データ 内容 値 :charヘッダ :780 uint8送信元の論理デバイスID ID未設定子機 011 uint8コマンド番号 0x0100112233AABBCCDD2 [uint8]任意のデータ そのまま 13uint8チェックサム 0x13charフッタ \rcharフッタ \n
データの判別条件 親機・中継機アプリは、さまざまな種類の子機からデータを受信することができます。
出力されたデータがシリアル通信アプリ(書式モード:簡易形式)のものであるかを確認するには、次の箇所を参照してください。
# データ 項目 条件 0 uint8送信元の論理デバイスID 0x64以下もしくは0x78であること1 uint8コマンド番号 0x80未満であること- - ペイロードのサイズ 3バイト以上82バイト以下であること
緩い条件のため、超簡単!標準アプリなど他のパケットの条件に続けて確認してください。
パーサの実装例 書式モード:拡張書式 データ形式 # データ 内容 備考 charヘッダ :のみ0 uint8送信元の論理デバイスID 親機0x00,子機0x01-0x64,未設定子機0x78 1 uint8コマンド番号 0xA0のみ2 uint8応答ID 送信側で指定した値 3 uint32送信元の拡張アドレス シリアルIDの先頭へ0x8を加えた値 7 uint32送信先の拡張アドレス 論理デバイスID使用時は0xFFFFFFFF 11 uint8LQI 受信時の電波通信品質 12 uint16続くバイト列の長さ バイト数\(M\)を表す 14 [uint8]任意のデータ 長さ\(M\)のバイト列 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
出力データの例
:78A0028201015AFFFFFFFFA8000700112233AABBCCC6 # データ 内容 備考 :charヘッダ :780 uint8送信元の論理デバイスID ID未設定子機 A01 uint8コマンド番号 0xA0022 uint8応答ID 0x028201015A3 uint32送信元の拡張アドレス 0x201015AFFFFFFFF7 uint32送信先の拡張アドレス 論理デバイスID指定 A811 uint8LQI 168/255000712 uint16続くバイト列の長さ 7バイト00112233AABBCC14 [uint8]任意のデータ そのまま C6uint8チェックサム 0xC6charフッタ charフッタ
データの判別条件 親機・中継機アプリは、さまざまな種類の子機からデータを受信することができます。
出力されたデータがシリアル通信アプリ(書式モード:拡張形式)のものであるかを確認するには、次の箇所を参照してください。
# データ 項目 条件 0 uint8送信元の論理デバイスID 0x64以下もしくは0x78であること1 uint8コマンド番号 0xA0であること2 uint8応答ID 0x80未満であること3 uint32送信元の拡張アドレス MSBが1であること(0x8???????) 12 uint16続くバイト列の長さ ペイロードのサイズ - 14バイトであること
パーサの実装例 1.3.3.2.1.1.1.4 - パル/キュー/アリアアプリからの出力(親機・中継機アプリ) パル/キュー/アリアアプリからデータを受信した際の出力書式
1.3.3.2.1.1.1.4.1 - パルアプリからの出力(親機・中継機アプリ) パルアプリからデータを受信した際の出力書式
全般 パルアプリから受信したデータは、センサ種別とその値からなるセンサーデータの羅列によって表現します。
パルアプリに共通する書式の詳細については、
共通書式の詳細 をご覧ください。
以降では、製品の種別に応じた具体的な例を取り上げます。
開閉センサーパル データ形式 # データ 内容 備考 charヘッダ :のみ0 uint32中継機のシリアルID 中継なしの場合80000000 4 uint8LQI 0-2555 uint16続き番号 7 uint32送信元のシリアルID 0x8???????11 uint8送信元の論理デバイスID 12 uint8センサー種別 0x80のみ13 uint8PAL基板バージョンとPAL基板ID 0x81のみ14 uint8センサーデータ の数3のみセンサーデータ1 15 uint8情報ビット 0x11のみ16 uint8データソース 0x30のみ17 uint8拡張バイト 0x08のみ18 uint8データ長 2のみ19 uint16データ 電源電圧(mV) センサーデータ2 21 uint8情報ビット 0x11のみ22 uint8データソース 0x30のみ23 uint8拡張バイト 0x01のみ24 uint8データ長 2のみ25 uint16データ ADC1の電圧(mV) センサーデータ3 27 uint8情報ビット 0x00のみ28 uint8データソース 0x00のみ29 uint8拡張バイト 0x00のみ30 uint8データ長 1のみ31 uint8データ 磁気データ センサーデータの末端 32 uint8チェックサム1 直前までのCRC8 uint8チェックサム2 チェックサム1までのLRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
出力データの例
:80000000A8001C82012B1E01808103113008020D0C1130010203E40000000101EC6E # データ 内容 値 :charヘッダ :800000000 uint32中継機のシリアルID 中継なし A84 uint8LQI 168/255001C5 uint16続き番号 2882012B1E7 uint32送信元のシリアルID 0x2012B1E0111 uint8送信元の論理デバイスID 0x018012 uint8センサー種別 8113 uint8PAL基板バージョンとPAL基板ID 開閉パルV1 0314 uint8センサーデータ の数3つセンサーデータ1 1115 uint8情報ビット 拡張バイトありuint16 3016 uint8データソース 電圧 0817 uint8拡張バイト 電源 0218 uint8データ長 2バイト0D0C19 uint16データ 3340mVセンサーデータ2 1121 uint8情報ビット 拡張バイトありuint16 3022 uint8データソース 電圧 0123 uint8拡張バイト ADC1 0224 uint8データ長 2バイト03E425 uint16データ 996mVセンサーデータ3 0027 uint8情報ビット 拡張バイトなしuint8 0028 uint8データソース 磁気 0029 uint8拡張バイト なし 0130 uint8データ長 1バイト0131 uint8データ N極が近づいた センサーデータの末端 EC32 uint8チェックサム1 0xEC6Euint8チェックサム2 0x6Echarフッタ '\r'charフッタ '\n'
データの判別条件 親機・中継機アプリは、さまざまな種類の子機からデータを受信することができます。
出力されたデータがパルアプリ(開閉センサーパル)のものであるかを確認するには、次の箇所を参照してください。
# データ 項目 条件 0 uint32中継機のシリアルID MSBが1であること 7 uint32送信元のシリアルID MSBが1であること 12 uint8センサー種別 0x80であること13 uint8PAL基板バージョンとPAL基板ID 0x81であること- - ペイロードのサイズ 33バイトであること
パーサの実装例 環境センサーパル データ形式 # データ 内容 備考 charヘッダ :のみ0 uint32中継機のシリアルID 中継なしの場合80000000 4 uint8LQI 0-2555 uint16続き番号 7 uint32送信元のシリアルID 0x8???????11 uint8送信元の論理デバイスID 12 uint8センサー種別 0x80のみ13 uint8PAL基板バージョンとPAL基板ID 0x82のみ14 uint8センサーデータ の数5のみセンサーデータ1 15 uint8情報ビット 0x11のみ16 uint8データソース 0x30のみ17 uint8拡張バイト 0x08のみ18 uint8データ長 2のみ19 uint16データ 電源電圧(mV) センサーデータ2 21 uint8情報ビット 0x11のみ22 uint8データソース 0x30のみ23 uint8拡張バイト 0x01のみ24 uint8データ長 2のみ25 uint16データ ADC1の電圧(mV) センサーデータ3 27 uint8情報ビット 0x05のみ28 uint8データソース 0x01のみ29 uint8拡張バイト 0x00のみ30 uint8データ長 2のみ31 int16データ 温度データ センサーデータ4 33 uint8情報ビット 0x01のみ34 uint8データソース 0x02のみ35 uint8拡張バイト 0x00のみ36 uint8データ長 2のみ37 uint16データ 湿度データ センサーデータ5 39 uint8情報ビット 0x02のみ40 uint8データソース 0x03のみ41 uint8拡張バイト 0x00のみ42 uint8データ長 4のみ43 uint32データ 照度データ センサーデータの末端 47 uint8チェックサム1 直前までのCRC8 uint8チェックサム2 チェックサム1までのLRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
出力データの例
:8000000084811F810EFF6D04808205113008020AEB11300102035A0501000209E3010200020E3A02030004000001BE6C00 # データ 内容 値 :charヘッダ :800000000 uint32中継機のシリアルID 中継なし 844 uint8LQI 132/255811F5 uint16続き番号 33055810EFF6D7 uint32送信元のシリアルID 0x10EFF6D0411 uint8送信元の論理デバイスID 0x048012 uint8センサー種別 8213 uint8PAL基板バージョンとPAL基板ID 環境パルV1 0514 uint8センサーデータ の数5つセンサーデータ1 1115 uint8情報ビット 拡張バイトありuint16 3016 uint8データソース 電圧 0817 uint8拡張バイト 電源 0218 uint8データ長 2バイト0AEB19 uint16データ 2795mVセンサーデータ2 1121 uint8情報ビット 拡張バイトありuint16 3022 uint8データソース 電圧 0123 uint8拡張バイト ADC1 0224 uint8データ長 2バイト035A25 uint16データ 858mVセンサーデータ3 0527 uint8情報ビット 拡張バイトなしint16 0128 uint8データソース 温度 0029 uint8拡張バイト なし 0230 uint8データ長 2バイト09E331 int16データ 25.31°C センサーデータ4 0133 uint8情報ビット 拡張バイトなしuint16 0234 uint8データソース 湿度 0035 uint8拡張バイト なし 0236 uint8データ長 2バイト0E3A37 uint16データ 36.42% センサーデータ5 0239 uint8情報ビット 拡張バイトなしuint32 0340 uint8データソース 照度 0041 uint8拡張バイト なし 0442 uint8データ長 4バイト000001BE43 uint32データ 446lxセンサーデータの末端 6C47 uint8チェックサム1 0x6C00uint8チェックサム2 0x00charフッタ '\r'charフッタ '\n'
データの判別条件 親機・中継機アプリは、さまざまな種類の子機からデータを受信することができます。
出力されたデータがパルアプリ(環境センサーパル)のものであるかを確認するには、次の箇所を参照してください。
# データ 項目 条件 0 uint32中継機のシリアルID MSBが1であること 7 uint32送信元のシリアルID MSBが1であること 12 uint8センサー種別 0x80であること13 uint8PAL基板バージョンとPAL基板ID 0x82であること- - ペイロードのサイズ 48バイトであること
パーサの実装例 動作センサーパル データ形式 出力データの例
:80000000BA002382011CEF01808312113008020D0211300102055C1504400600100010045015044106000800100430150442060000001004381504430600080018043015044406000000180458150445060000002004381504460600080018042815044706FFE80010042015044806FFF00010043815044906FFE80018043015044A06FFF80018044015044B06FFF80018041815044C0600000010042015044D0600000028045015044E0600000008043815044F0600000018043828A5 # データ 内容 値 :charヘッダ :800000000 uint32中継機のシリアルID 中継なし BA4 uint8LQI 186/25500235 uint16続き番号 3582011CEF7 uint32送信元のシリアルID 0x2011CEF0111 uint8送信元の論理デバイスID 0x018012 uint8センサー種別 8313 uint8PAL基板バージョンとPAL基板ID 動作パルV1 1214 uint8センサーデータ の数18個センサーデータ1 1115 uint8情報ビット 拡張バイトありuint16 3016 uint8データソース 電圧 0817 uint8拡張バイト 電源 0218 uint8データ長 2バイト0D0219 uint16データ 3330mVセンサーデータ2 1121 uint8情報ビット 拡張バイトありuint16 3022 uint8データソース 電圧 0123 uint8拡張バイト ADC1 0224 uint8データ長 2バイト055C25 uint16データ 1372mVセンサーデータ3 1527 uint8情報ビット 拡張バイトありint16 0428 uint8データソース 加速度 4029 uint8拡張バイト 100Hz, 0番サンプル 0630 uint8データ長 6バイト00100010045031 int16データ X16mG/Y16mG/Z1104mG センサーデータ4 1537 uint8情報ビット 拡張バイトありint16 0438 uint8データソース 加速度 4139 uint8拡張バイト 100Hz, 1番サンプル 0640 uint8データ長 6バイト00080010043041 uint16データ X8mG/Y16mG/Z1072mG センサーデータ5 <省略> センサデータ15 15177 uint8情報ビット 拡張バイトありint16 04178 uint8データソース 加速度 4F179 uint8拡張バイト 100Hz, 15番サンプル 06180 uint8データ長 6バイト000000180438181 uint32データ X0mG/Y24mG/Z1080mG センサーデータの末端 28187 uint8チェックサム1 0x28A5uint8チェックサム2 0xA5charフッタ '\r'charフッタ '\n'
データの判別条件 親機・中継機アプリは、さまざまな種類の子機からデータを受信することができます。
出力されたデータがパルアプリ(動作センサーパル)のものであるかを確認するには、次の箇所を参照してください。
# データ 項目 条件 0 uint32中継機のシリアルID MSBが1であること 7 uint32送信元のシリアルID MSBが1であること 12 uint8センサー種別 0x80であること13 uint8PAL基板バージョンとPAL基板ID 0x83であること- - ペイロードのサイズ 188バイトであること
パーサの実装例 通知パル データ形式 # データ 内容 備考 charヘッダ :のみ0 uint32中継機のシリアルID 中継なしの場合80000000 4 uint8LQI 0-2555 uint16続き番号 7 uint32送信元のシリアルID 0x8???????11 uint8送信元の論理デバイスID 12 uint8センサー種別 0x80のみ13 uint8PAL基板バージョンとPAL基板ID 0x84のみ14 uint8センサーデータ の数3のみセンサーデータ1 15 uint8情報ビット 0x11のみ16 uint8データソース 0x30のみ17 uint8拡張バイト 0x08のみ18 uint8データ長 2のみ19 uint16データ 電源電圧(mV) センサーデータ2 21 uint8情報ビット 0x11のみ22 uint8データソース 0x30のみ23 uint8拡張バイト 0x01のみ24 uint8データ長 2のみ25 uint16データ ADC1の電圧(mV) センサーデータ3 27 uint8情報ビット 0x12のみ28 uint8データソース 0x05のみ29 uint8拡張バイト 0x04のみ30 uint8データ長 4のみ31 uint8データ 加速度イベントデータ 32 [uint8]未使用 センサーデータの末端 35 uint8チェックサム1 直前までのCRC8 uint8チェックサム2 チェックサム1までのLRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
出力データの例
:80000000C9BBC082014C3501808403 113008020D0C 1130010203F9 1205040410000000 97C6 # データ 内容 値 :charヘッダ :800000000 uint32中継機のシリアルID 中継なし C94 uint8LQI 201/255BBC05 uint16続き番号 4806482014C357 uint32送信元のシリアルID 0x2014C350111 uint8送信元の論理デバイスID 0x018012 uint8センサー種別 8413 uint8PAL基板バージョンとPAL基板ID 通知パルV1 0314 uint8センサーデータ の数3つセンサーデータ1 1115 uint8情報ビット 拡張バイトありuint16 3016 uint8データソース 電圧 0817 uint8拡張バイト 電源 0218 uint8データ長 2バイト0D0C19 uint16データ 3340mVセンサーデータ2 1121 uint8情報ビット 拡張バイトありuint16 3022 uint8データソース 電圧 0123 uint8拡張バイト ADC1 0224 uint8データ長 2バイト03F925 uint16データ 1017mVセンサーデータ3 1227 uint8情報ビット 拡張バイトありuint32 0528 uint8データソース イベント 0429 uint8拡張バイト 加速度イベント 0430 uint8データ長 4バイト1031 uint8データ ムーブ 00000032 [uint8]センサーデータの末端 9735 uint8チェックサム1 0x97C6uint8チェックサム2 0xC6charフッタ '\r'charフッタ '\n'
データの判別条件 親機・中継機アプリは、さまざまな種類の子機からデータを受信することができます。
出力されたデータがパルアプリ(通知パル)のものであるかを確認するには、次の箇所を参照してください。
# データ 項目 条件 0 uint32中継機のシリアルID MSBが1であること 7 uint32送信元のシリアルID MSBが1であること 12 uint8センサー種別 0x80であること13 uint8PAL基板バージョンとPAL基板ID 0x84であること- - ペイロードのサイズ 36バイトであること
1.3.3.2.1.1.1.4.2 - キューアプリからの出力(親機・中継機アプリ) キューアプリからデータを受信した際の出力書式
TWELITE CUE モード データ形式 出力データの例
:80000000CF7F7382019E3B0180050F003400038135001205040406000000113008020B8611300102042E000000018015044006FFF00010FC1815044106FFF00018FC1815044206FFF00010FC0015044306FFF80000FC1015044406FFF00010FC1815044506FFE00018FBF815044606FFE80000FC0015044706FFE80010FBF815044806FFE80010FC0815044906FFE80010FC080C0E # データ 内容 値 :charヘッダ :800000000 uint32中継機のシリアルID 中継なし CF4 uint8LQI 207/2557F735 uint16続き番号 32627 82019E3B7 uint32送信元のシリアルID 0x2019E3B0111 uint8送信元の論理デバイスID 0x018012 uint8センサー種別 0513 uint8PAL基板バージョンとPAL基板ID TWELITE CUE 0F14 uint8センサーデータ の数15個センサーデータ1 0015 uint8情報ビット 拡張バイトなしuint8 3416 uint8データソース パケットプロパティ 0017 uint8拡張バイト なし 0318 uint8データ長 3バイト81350019 [uint8]データ ID129、タイマイベント発生 センサーデータ2 1222 uint8情報ビット 拡張バイトありuint32 0523 uint8データソース イベント 0424 uint8拡張バイト 加速度イベント 0425 uint8データ長 4バイト0600000026 uint32データ サイコロ:6 センサーデータ3 1130 uint8情報ビット 拡張バイトありuint16 3031 uint8データソース 電圧 0832 uint8拡張バイト 電源電圧 0233 uint8データ長 2バイト0B8634 uint16データ 2950mVセンサーデータ4 1136 uint8情報ビット 拡張バイトありuint16 3037 uint8データソース 電圧 0138 uint8拡張バイト ADC1の電圧 0239 uint8データ長 2バイト042E40 uint16データ 1070mVセンサーデータ5 0042 uint8情報ビット 拡張バイトなしuint8 0043 uint8データソース 磁気 0044 uint8拡張バイト なし 0145 uint8データ長 1バイト8046 uint8データ 磁石なし(定期送信) センサーデータ6 1547 uint8情報ビット 拡張バイトありint16 0448 uint8データソース 加速度データ 4049 uint8拡張バイト 100Hz, 0番サンプル 0650 uint8データ長 6バイトFFF00010FC1851 [int16]データ X-16mG/Y16mG/Z-1000mG センサーデータ7 1557 uint8情報ビット 拡張バイトありint16 0458 uint8データソース 加速度データ 4159 uint8拡張バイト 100Hz, 1番サンプル 0660 uint8データ長 6バイトFFF00018FC1861 [int16]データ X-16mG/Y24mG/Z-1000mG センサーデータ8 <省略> センサーデータ15 15137 uint8情報ビット 拡張バイトありint16 04138 uint8データソース 加速度データ 49139 uint8拡張バイト 100Hz, 9番サンプル 06140 uint8データ長 6バイトFFE80010FC08141 int16データ X-24mG/Y16mG/Z-1016mG センサーデータの末端 0C147 uint8チェックサム1 0x0C0Euint8チェックサム2 0x0Echarフッタ '\r'charフッタ '\n'
データの判別条件 親機・中継機アプリは、さまざまな種類の子機からデータを受信することができます。
出力されたデータがキューアプリ(TWELITE CUEモード)のものであるかを確認するには、次の箇所を参照してください。
# データ 項目 条件 0 uint32中継機のシリアルID MSBが1であること 7 uint32送信元のシリアルID MSBが1であること 12 uint8センサー種別 0x80であること13 uint8PAL基板バージョンとPAL基板ID 0x05であること- - ペイロードのサイズ 148バイトであること
パーサの実装例 開閉センサーパルモード 動作センサーパルモード(加速度計測モード) 動作センサーパルモード(ムーブ/ダイスモード) データ形式 # データ 内容 備考 charヘッダ :のみ0 uint32中継機のシリアルID 中継なしの場合80000000 4 uint8LQI 0-2555 uint16続き番号 7 uint32送信元のシリアルID 0x8???????11 uint8送信元の論理デバイスID 12 uint8センサー種別 0x80のみ13 uint8PAL基板バージョンとPAL基板ID 0x03のみ14 uint8センサーデータ の数04のみセンサーデータ1 15 uint8情報ビット 0x00のみ16 uint8データソース 0x34のみ17 uint8拡張バイト 0x00のみ18 uint8データ長 3のみ19 [uint8]データ パケットプロパティデータ センサーデータ2 22 uint8情報ビット 0x12のみ23 uint8データソース 0x05のみ24 uint8拡張バイト 0x04のみ25 uint8データ長 4のみ26 uint32データ イベントデータ センサーデータ3 30 uint8情報ビット 0x11のみ31 uint8データソース 0x30のみ32 uint8拡張バイト 0x08のみ33 uint8データ長 2のみ34 uint16データ 電源電圧(mV) センサーデータ4 36 uint8情報ビット 0x11のみ37 uint8データソース 0x30のみ38 uint8拡張バイト 0x01のみ39 uint8データ長 2のみ40 uint16データ ADC1の電圧(mV) センサーデータの末端 42 uint8チェックサム1 直前までのCRC8 uint8チェックサム2 チェックサム1までのLRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
出力データの例 ダイスモードの例を示します。ムーブモードの場合は、センサーデータ2のイベント が異なります。
:80000000B400048106664801800304003400038035001205040403000000113008020D2011300102052C59B7 # データ 内容 値 :charヘッダ :800000000 uint32中継機のシリアルID 中継なし B14 uint8LQI 177/25500085 uint16続き番号 8 810666487 uint32送信元のシリアルID 0x2019E3B0111 uint8送信元の論理デバイスID 0x10666488012 uint8センサー種別 0313 uint8PAL基板バージョンとPAL基板ID TWELITE CUE ダイス/ムーブ 0414 uint8センサーデータ の数4つセンサーデータ1 0015 uint8情報ビット 拡張バイトなしuint8 3416 uint8データソース パケットプロパティ 0017 uint8拡張バイト なし 0318 uint8データ長 3バイト80350019 [uint8]データ ID128、イベント発生(他ADC1と電源のみ) センサーデータ2 1222 uint8情報ビット 拡張バイトありuint32 0523 uint8データソース イベント 0424 uint8拡張バイト 加速度イベント 0425 uint8データ長 4バイト0300000026 uint32データ ダイスモード、サイコロ:3 センサーデータ3 1130 uint8情報ビット 拡張バイトありuint16 3031 uint8データソース 電圧 0832 uint8拡張バイト 電源電圧 0233 uint8データ長 2バイト0D2034 uint16データ 3360mVセンサーデータ4 1136 uint8情報ビット 拡張バイトありuint16 3037 uint8データソース 電圧 0138 uint8拡張バイト ADC1の電圧 0239 uint8データ長 2バイト052C40 uint16データ 1324mVセンサーデータの末端 5942 uint8チェックサム1 0x0CB7uint8チェックサム2 0x0Echarフッタ '\r'charフッタ '\n'
データの判別条件 親機・中継機アプリは、さまざまな種類の子機からデータを受信することができます。
出力されたデータがキューアプリ(動作センサーパルモードのムーブあるいはダイスモード)のものであるかを確認するには、次の箇所を参照してください。
# データ 項目 条件 0 uint32中継機のシリアルID MSBが1であること 7 uint32送信元のシリアルID MSBが1であること 12 uint8センサー種別 0x80であること13 uint8PAL基板バージョンとPAL基板ID 0x03であること- - ペイロードのサイズ 43バイトであること
パーサの実装例 1.3.3.2.1.1.1.4.3 - アリアアプリからの出力(親機・中継機アプリ) アリアアプリからデータを受信した際の出力書式
TWELITE ARIA モード データ形式 出力データの例
:80000000CF00028201BAA201800607003400038135001205350401000000113008020D201130010204ED00000001800501000209D0010200020F347934[CR][LF] # データ 内容 値 :charヘッダ :800000000 uint32中継機のシリアルID 中継なし CF4 uint8LQI 207/25500025 uint16続き番号 2 8201BAA27 uint32送信元のシリアルID 0x201BAA20111 uint8送信元の論理デバイスID 0x018012 uint8センサー種別 0613 uint8PAL基板バージョンとPAL基板ID TWELITE ARIA 0714 uint8センサーデータ の数7つセンサーデータ1 0015 uint8情報ビット 拡張バイトなしuint8 3416 uint8データソース パケットプロパティ 0017 uint8拡張バイト なし 0318 uint8データ長 3バイト81350019 [uint8]データ ID129、タイマイベント発生 センサーデータ2 1222 uint8情報ビット 拡張バイトありuint32 0523 uint8データソース イベント 3524 uint8拡張バイト タイマイベント 0425 uint8データ長 4バイト0100000026 uint32データ タイマによる起床 センサーデータ3 1130 uint8情報ビット 拡張バイトありuint16 3031 uint8データソース 電圧 0832 uint8拡張バイト 電源電圧 0233 uint8データ長 2バイト0D2034 uint16データ 3360mVセンサーデータ4 1136 uint8情報ビット 拡張バイトありuint16 3037 uint8データソース 電圧 0138 uint8拡張バイト ADC1の電圧 0239 uint8データ長 2バイト04ED40 uint16データ 1261mVセンサーデータ5 0042 uint8情報ビット 拡張バイトなしuint8 0043 uint8データソース 磁気 0044 uint8拡張バイト なし 0145 uint8データ長 1バイト8046 uint8データ 磁石なし(定期送信) センサーデータ6 0547 uint8情報ビット 拡張バイトなしint16 0148 uint8データソース 温度 0049 uint8拡張バイト なし 0250 uint8データ長 2バイト09D051 int16データ 25.12°Cセンサーデータ7 0153 uint8情報ビット 拡張バイトなしuint16 0254 uint8データソース 湿度 0055 uint8拡張バイト なし 0256 uint8データ長 2バイト0F3457 uint16データ 38.92%センサーデータの末端 7959 uint8チェックサム1 0x7934uint8チェックサム2 0x34charフッタ '\r'charフッタ '\n'
データの判別条件 親機・中継機アプリは、さまざまな種類の子機からデータを受信することができます。
出力されたデータがアリアアプリ(TWELITE ARIAモード)のものであるかを確認するには、次の箇所を参照してください。
# データ 項目 条件 0 uint32中継機のシリアルID MSBが1であること 7 uint32送信元のシリアルID MSBが1であること 12 uint8センサー種別 0x80であること13 uint8PAL基板バージョンとPAL基板ID 0x06であること- - ペイロードのサイズ 60バイトであること
パーサの実装例 開閉センサーパルモード 1.3.3.2.1.1.1.4.4 - パル・キュー・アリアアプリからの出力の詳細(親機・中継機アプリ) パル・キュー・アリアアプリに共通する出力書式の詳細
パル・キュー・アリアアプリの子機から受信したデータは、共通の書式に沿って出力されます。ここには、その詳細を記しています。それぞれの具体的な出力例は、
各アプリのページ をご覧ください。
全体 データ形式 # データ 内容 備考 charヘッダ :のみ0 uint32中継機のシリアルID 中継なしの場合80000000 4 uint8LQI 0-2555 uint16続き番号 7 uint32送信元のシリアルID 0x8???????11 uint8送信元の論理デバイスID 12 uint8センサー種別 0x80のみ13 uint8PAL基板バージョンとPAL基板ID 0x81など14 uint8センサーデータ の数15 [uint8]センサーデータ の羅列長さ\(N\)のバイト列 15+\(N\) uint8チェックサム1 直前までのCRC8 uint8チェックサム2 チェックサム1までのLRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
出力データの例
:80000000A8001C82012B1E01808103113008020D0C1130010203E40000000101EC6E # データ 内容 値 :charヘッダ :800000000 uint32中継機のシリアルID 中継なし A84 uint8LQI 168/255001C5 uint16続き番号 2882012B1E7 uint32送信元のシリアルID 0x2012B1E0111 uint8送信元の論理デバイスID 0x018012 uint8センサー種別 - 8113 uint8PAL基板バージョンとPAL基板ID 0x810314 uint8センサーデータ の数3つ1130...010115 [uint8]センサーデータ の羅列長さ17のバイト列 EC15+17 uint8チェックサム1 0xEC6Euint8チェックサム2 0x6Echarフッタ '\r'charフッタ '\n'
センサーデータ データ形式 # データ 内容 備考 0 uint8情報ビット データの型や拡張バイトの有無 1 uint8データソース センサー値の種類 2 uint8拡張バイト センサー値の付加情報 3 uint8データ長 センサー値の長さ 4 [uint8]データ センサー値
出力データの例
情報ビット センサー値のデータ型や拡張バイトの有無、読み込みエラーの有無を示します。
bit 7 6 5 4 3 2 1 0 機能 ERR - - EXT - TYP:2 TYP:1 TYP:0
各機能は次の内容を示します。
機能 説明 値 内容 ERR 読み込みエラーの有無 0正常 1エラーあり EXT 拡張バイトの有無 0拡張バイトなし 1拡張バイトあり TYP データ型 000uint8001uint16010uint32011N/A 100int8101int16110int32111[uint8]
データソース センサー値の種類を示します。
値 内容 0x00磁気 0x01温度 0x02湿度 0x03照度 0x04加速度 0x05イベント 0x30電圧 0x34パケットプロパティ
拡張バイト 連続データのインデックスなど、センサー値の付加情報を示します。
データソースが磁気/温度/湿度/照度/パケットプロパティの場合 なし
データソースが加速度の場合 加速度サンプルデータの属性を示します。
bit 7 6 5 4 3 2 1 0 機能 SFQ:2 SFQ:1 SFQ:0 SNM:4 SNM:3 SNM:2 SNM:1 SNM:0
各機能は次の内容を示します。
機能 説明 値 内容 SFQ サンプリング周波数 000(0x00|SNM)25Hz 001(0x20|SNM)50Hz 010(0x40|SNM)100Hz 011(0x60|SNM)190Hz 100以上未定義 SNM サンプル番号 0-31古い順
データソースがイベントの場合 イベントの発生要因を示します。
値 内容 0x00磁気 0x01温度 0x02湿度 0x03照度 0x04加速度 0x31デジタル入力 0x35タイマ
データソースが電圧の場合 対象を示します。
値 内容 0x01ADC1 0x02ADC2 0x03ADC3 0x04ADC4 0x08電源
データ長 続くデータのバイト数を示します。
データ センサー値を表します。
データソースが磁気の場合 データ型はuint8です。
値 内容 0x00磁石なし 0x01N極が近づいた 0x02S極が近づいた 0x80磁石なし(定期送信) 0x81N極が近くにある(定期送信) 0x82S極が近くにある(定期送信)
データソースが温度の場合 データ型はint16です。
100倍されたセ氏の温度を表します。
データソースが湿度の場合 データ型はuint16です。
100倍された相対湿度を表します。
データソースが照度の場合 データ型はuint32です。
ルクスの値を表します。
データソースが加速度の場合 int16のデータが3つ続きます。
X,Y,Z軸の値(mG)の合計は6バイトです。
byte 0 1 2 3 4 5 内容 X:15-8 X:7-0 Y:15-8 Y:7-0 Z:15-8 Z:7-0
データソースがイベントの場合 uint8のデータが4つ続きます。
先頭のデータがイベントの内容を表し、残りは未使用です。
拡張バイトが磁気の場合 先頭の値 内容 0x00磁石なし 0x01N極が近くにある 0x02S極が近くにある
拡張バイトが加速度の場合 先頭の値 内容 0x00静止(ムーブモード) 0x01サイコロ:1 0x02サイコロ:2 0x03サイコロ:3 0x04サイコロ:4 0x05サイコロ:5 0x06サイコロ:6 0x08シェイク 0x10ムーブ
拡張バイトがタイマの場合 データソースが電圧の場合 データ型はuint16です。
mV単位の電圧を表します。
データソースがパケットプロパティの場合 uint8のデータが3つ続きます。
byte 0 1 2 データ パケットID 起床要因の根源 起床要因の条件
各データは次の内容を表します。
データ 値 内容 パケットID 0イベントなし、ADC1と電源の電圧のみ 1-127イベントなし、その他のデータあり 128イベントあり、ADC1と電源の電圧のみ 129-255イベントあり、その他のデータあり 起床要因の根源 0x00磁気 0x01温度 0x02湿度 0x03照度 0x04加速度 0x31デジタル入力 0x35タイマ 起床要因の条件 0x00イベントが発生した 0x01値が変化した 0x02値がしきい値を上回った 0x03値がしきい値を下回った 0x04値が範囲を満たした
1.3.3.2.1.1.1.5 - actからの出力(親機・中継機アプリ) act からデータを受信した際の出力書式
act から受信したデータ データ形式 # データ 内容 備考 charヘッダ :のみ0 uint8送信元の論理デバイスID 1 uint8コマンド種別 0xAAのみ2 uint8応答ID 0x00-0x7F3 uint32送信元のシリアルID 7 uint32送信先のシリアルID 論理デバイスID指定時は00000000 11 uint8LQI 0-25512 uint16データのバイト数 14 [uint8]任意のデータ 長さ\(N\)のバイト列 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
出力データの例
:FEAA008201015A00000000B7000F424154310F0CEE000B03FF03FF03FF92 # データ 内容 値 :charヘッダ :FE0 uint8送信元の論理デバイスID 0xFEAA1 uint8コマンド種別 0xAA002 uint8応答ID 0x008201015A3 uint32送信元のシリアルID 0x201015A000000007 uint32送信先のシリアルID 論理デバイスID指定 B711 uint8LQI 183/255000F12 uint16データのバイト数 15バイト424154310F0CEE000B03FF03FF03FF14 [uint8]任意のデータ そのまま 92uint8チェックサム 0x92charフッタ \rcharフッタ \n
1.3.3.2.1.1.1.6 - 無線タグアプリからの出力(親機・中継機アプリ) 無線タグアプリからデータを受信した際の出力書式
子機へ主なセンサーを接続した際の出力を記載します。
アナログセンサー データ形式 # データ 内容 備考 charヘッダ :のみ0 uint32中継機のシリアルID 中継なしは80000000 4 uint8LQI 0-2555 uint16続き番号 7 uint32送信元のシリアルID 11 uint8送信元の論理デバイスID 12 uint8センサー種別 13 uint8電源電圧(mV) 電源電圧の計算 を参照14 uint16ADC1の電圧 16 uint16ADC2の電圧 18 uint32未使用 22 uint8チェックサム
出力データの例
:80000000B700628201015A0010DF08FD09A300000000E9 # データ 内容 値 :charヘッダ :800000000 uint32中継機のシリアルID 中継なし B74 uint8LQI 183/25500625 uint16続き番号 988201015A7 uint32送信元のシリアルID 0x201015A0011 uint8送信元の論理デバイスID 0x001012 uint8センサー種別 アナログセンサー DF13 uint8電源電圧(mV) 3330mV08FD14 uint16ADC1の電圧 2301mV09A316 uint16ADC2の電圧 2467mV0000000018 uint32未使用 E922 uint8チェックサム 0xE9charフッタ \rcharフッタ \n
加速度センサー(ADXL34x / TWELITE 2525A) データ形式 # データ 内容 備考 charヘッダ :のみ0 uint32中継機のシリアルID 中継なしは80000000 4 uint8LQI 0-2555 uint16続き番号 7 uint32送信元のシリアルID 11 uint8送信元の論理デバイスID 12 uint8センサー種別 13 uint8電源電圧(mV) 電源電圧の計算 を参照14 uint16ADC1の電圧 16 uint16ADC2の電圧 18 uint8センサーモード番号 19 int16X軸の加速度 単位はmG*10 21 int16Y軸の加速度 単位はmG*10 23 int16Z軸の加速度 単位はmG*10 25 uint8チェックサム
出力データの例
:8000000063001781013C850035DF057702F2000000FF96FFF0BB # データ 内容 値 :charヘッダ :800000000 uint32中継機のシリアルID 中継なし 634 uint8LQI 99/25500175 uint16続き番号 2381013C857 uint32送信元のシリアルID 0x1013C850011 uint8送信元の論理デバイスID 0x003512 uint8センサー種別 加速度センサー(ADXL34x) DF13 uint8電源電圧(mV) 3330mV057714 uint16ADC1の電圧 1399mV02F216 uint16ADC2の電圧 754mV0018 uint8センサーモード番号 通常 000019 int16X軸の加速度 0mGFF9621 int16Y軸の加速度 -1060mGFFF023 int16Z軸の加速度 -160mGBB25 uint8チェックサム 0xBBcharフッタ \rcharフッタ \n
スイッチ データ形式 # データ 内容 備考 charヘッダ :のみ0 uint32中継機のシリアルID 中継なしは80000000 4 uint8LQI 0-2555 uint16続き番号 7 uint32送信元のシリアルID 11 uint8送信元の論理デバイスID 12 uint8センサー種別 13 uint8電源電圧(mV) 電源電圧の計算 を参照14 uint16ADC1の電圧 16 uint16ADC2の電圧 18 uint8センサーモード番号 0がHi→Lo、1がLo→Hi19 uint8DI1の状態1がLo20 uint8未使用 21 uint8チェックサム
出力データの例
:800000009C00118201015A00FEDF000709A300010064
# データ 内容 値 :charヘッダ 800000000 uint32中継機のシリアルID 中継なし 9C4 uint8LQI 156/25500625 uint16続き番号 988201015A7 uint32送信元のシリアルID 0x201015A0011 uint8送信元の論理デバイスID 0x00FE12 uint8センサー種別 スイッチ DF13 uint8電源電圧(mV) 3330mV000714 uint16ADC1の電圧 7mV09A316 uint16ADC2の電圧 2467mV0018 uint8センサーモード番号 Hi→Lo 0119 uint8DI1の状態Lo 0020 uint8未使用 6421 uint8チェックサム 0x64charフッタ \rcharフッタ \n
電源電圧の計算 電源電圧 \(V_{cc}\) は、受信した値 \(e_{cc}\) を使って次のように表すことができます。
$$\begin{cases}
V_{cc} = 1950+5e_{cc} & (e_{cc} <= 170) \\
V_{cc} = 2800+10(e_{cc}-170) & (e_{cc} > 170)
\end{cases}$$
単位は mV
1.3.3.2.1.1.2 - 親機・中継機アプリの送信コマンド 子機へデータを送信する際の入力
既定の書式でシリアルポートから入力されたコマンドを子機へ送信します。
1.3.3.2.1.1.2.1 - 超簡単!標準アプリへの入力(親機・中継機アプリ) 超簡単!標準アプリの出力を制御するためのコマンド
超簡単!標準アプリの出力を制御できます。
デジタル・アナログ入出力 0x80:相手端末の出力変更相手端末の出力信号を制御します。
データ形式 # データ 内容 備考 charヘッダ :のみ0 uint8送信先の論理デバイスID 親機0x00,子機0x01-0x64,全子機0x78 1 uint8コマンド番号 0x80のみ2 uint8書式バージョン 0x01のみ3 uint8デジタル信号 LSBからDOxに対応、0でHigh 4 uint8デジタル信号マスク LSBからDOxに対応、1で有効 5 uint16PWM1信号0-1024,0xFFFFで無効7 uint16PWM2信号0-1024,0xFFFFで無効9 uint16PWM3信号0-1024,0xFFFFで無効11 uint16PWM4信号0-1024,0xFFFFで無効uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
1.3.3.2.1.1.2.2 - シリアル通信アプリへの入力(親機・中継機アプリ) シリアル通信アプリへデータを送信するコマンド
シリアル通信アプリの子機へデータを送信できます(書式モード、簡易形式)
UART 書式モード:アスキー・簡易形式 App_Wings v1.3 以降では、書式モード(A)の簡易形式に対応しています。
2024年9月現在、公開中の SDK に App_Wings v1.3 は含まれていません。
次のリンクから App_Wings v1.3 をダウンロードし、ファイルを指定して書き込む ことで使用できます。
データ形式 # データ 内容 備考 charヘッダ :のみ0 uint8送信先の論理デバイスID 親機0x00,子機0x01-0x64,全子機0x78 1 uint8コマンド番号 0x80未満の任意の値2 [uint8]任意のデータ 長さ\(N\)のバイト列(\(N\leqq80\)を推奨) uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
1.3.3.2.1.1.2.3 - パルアプリ(通知パル)への入力(親機・中継機アプリ) 通知パルのLEDを制御するためのコマンド
通知パルのLEDを制御できます。
:0190010004000169[CR][LF]
^1^2^3^^^^^^^4^5
番号 バイト数 意味 データ例 備考 1 1 送信先の論理デバイスID 01 送信先のTWELITE PALの論理デバイスIDを指定します。
2 1 コマンド種別 90 3 1 コマンドパラメータ数 01 コマンドパラメータの数を指定します。例えば、コマンドパラメータを1つだけ指定するなら1に、2つ指定するには2にします。 4 コマンド数x4 コマンドパラメータ 00040001 イベントやLEDの色などを指定するためのパラメータを指定します。
5 1 チェックサム 69 1~4の各バイトの和を8ビット幅で計算し2の補数をとります。つまりデータ部の各バイトの総和+チェックサムバイトを8ビット幅で計算すると0になります。
6 2 フッター [CR][LF] [CR] (0x0D) [LF] (0x0A) を指定します。ただし、チェックサムをXで省略する場合はフッターも省略可能です。
コマンドパラメータ 4バイトのコマンドパラメータを組み合わせてコマンドを指定します。
0x00:イベントIDを送信する TWELITE PALは受信したイベントIDごとの振る舞いが設定されております。 本パラメータでは送信先のTWELITE PALにイベントIDを送信し、設定した動作を行います。
イベント毎の振る舞いを変更するにはTWELITE PALの設定を変更してください。
番号 バイト数 内容 備考 1 1 コマンドパラメータID 0x00 2 1 送信先PAL ID 送信先のPAL IDを指定します。
3 1 未使用領域 0x00固定 4 1 イベントID 0~16までのイベントIDを指定します。
0x01 : LEDの色、点滅パターン、明るさを送信する 送信先の通知パルにLEDの色、点滅パターン、明るさを送信します。
番号 バイト数 内容 備考 1 1 コマンドパラメータID 0x01 2 1 色
0:赤
3 1 点滅パターン 0:常時点灯
4 1 明るさ 0:消灯
0x02 : 点灯時間を送信する 通知パルのLEDの点灯時間を送信します。
本コマンドパラメータは、LEDの色、点滅パターン、明るさのパラメータが含まれないので、コマンドパラメータ0x01または0x03と組み合わせて使用します。
本コマンドパラメータを使用する場合は、送信間隔を必ず点灯時間より大きく設定してご使用ください。
番号 バイト数 内容 備考 1 1 コマンドパラメータID 0x02 2 1 未使用領域
0xFF固定 3 1 未使用領域 0x00固定 4 1 点灯時間 秒で指定(0は常時点灯)
0x03:LEDの色をRGBWで指定する 通知パルのLEDの点灯色をRGBWで送信します。
コマンドパラメータ0x00および0x01とは同時に使用できません。
番号 バイト数 内容 備考 1 1 コマンドパラメータID 0x03 2 1 未使用領域
0xFF固定 3 2 LEDの点灯色 LSBからRGBWの順番で4ビットずつ指定する。
数値が大きいほど明るい
0x04:点滅パラメータを指定する。 通知パルのLEDの点滅周期と点滅Dutyを送信します。
本コマンドパラメータは、LEDの色のパラメータが含まれないので、コマンドパラメータ0x03と組み合わせて使用します。
コマンドパラメータ0x00および0x01とは同時に使用できません。
番号 バイト数 内容 備考 1 1 コマンドパラメータID 0x04 2 1 未使用領域
0xFF固定 3 1 点滅時間の割合 0x00~0xFFで指定する。
数値が大きいほど1周期当たりの点灯時間が長くなる。
1周期の半分だけ点灯させるには0x7Fを指定する。
4 1 点滅周期 0x00~0xFFで指定する。
設定値が1大きくなるごとに点滅の周期が約0.04sずつ増える。
1周期1秒にするには0x17を指定する。
コマンド例 例1:イベントを送信する 論理デバイスIDが1のNOTICE PALに対してイベント1を送信するコマンド例です。
:0190010004000169
^1^2^3^4^5^6^7^8
番号 バイト数 意味 データ例 データ例の内容 備考 1 1 送信先の論理デバイスID 01 送信先の論理デバイスIDは0x01 2 1 コマンド種別 90 0x90コマンド 90固定 3 1 コマンド数 01 コマンドは1個 4 1 コマンドID 00 コマンド00 5 1 送信先PAL ID 04 通知パルに対して送信する 6 1 未使用領域 00 7 1 イベントID 01 イベント1 0x00~0x10まで 8 1 チェックサム 69
例2:通知パルのLEDの点灯色を送信する 論理デバイスIDが1のNOTICE PALに対して明るさ8で白色にゆっくり点滅させるためのコマンドです。
:019001010601085E
^1^2^3^4^5^6^7^8
番号 バイト数 意味 データ例 データ例の内容 備考 1 1 送信先の論理デバイスID 01 送信先の論理デバイスIDは0x01 2 1 コマンド種別 90 0x90コマンド 90固定 3 1 コマンド数 01 コマンドは1個 4 1 コマンドパラメータID 01 コマンドパラメータID 0x01 5 1 色 06 白 6 1 点滅パターン 01 点滅 7 1 明るさ 08 明るさ8 0x00~0x0Fまで 8 1 チェックサム 5E
例3:通知パルのLEDの点灯色と点灯時間を送信する 論理デバイスIDが1のNOTICE PALに対して紫に点灯させ、点灯後1秒で消灯させるコマンドです。
本コマンドを試す場合、送信間隔を必ず点灯時間より大きく設定してご使用ください。
:0190020104000802FF00015E
^1^2^3^4^5^6^7^8^9^a^b^c
番号 バイト数 意味 データ例 データ例の内容 備考 1 1 送信先の論理デバイスID 01 送信先の論理デバイスIDは0x01 2 1 コマンド種別 90 0x90コマンド 90固定 3 1 コマンド数 02 コマンドは2個 4 1 コマンドパラメータID 01 コマンドパラメータID 0x01 5 1 色 04 紫 6 1 点滅パターン 00 点灯 7 1 明るさ 08 明るさ8 0x00~0x0Fまで 8 1 コマンドパラメータID 02 コマンドパラメータID 0x02 9 1 未使用領域 FF a 1 未使用領域 00 b 1 点灯時間 01 点灯後1秒で消える c 1 チェックサム 5E
例4:通知パルに詳細な点灯色を送信する 論理デバイスIDが1のNOTICE PALに対して紫に点灯させるコマンドです。
:01900103FF0F0459
^1^2^3^4^5^^^6^7
番号 バイト数 意味 データ例 データ例の内容 備考 1 1 送信先の論理デバイスID 01 送信先の論理デバイスIDは0x01 2 1 コマンド種別 90 0x90コマンド 90固定 3 1 コマンド数 01 コマンドは2個 4 1 コマンドパラメータID 03 コマンドパラメータID 0x03 5 1 未使用 FF 6 2 LEDの点灯色 0F04 青:15、赤4の明るさで点灯させる。 LSBからRGBWの順番で各色4bitずつ(0~15)で指定する。
数値が大きいほど明るい
7 1 チェックサム 59
例5:通知パルのLEDの点灯色と点灯時間を送信する 論理デバイスIDが1のNOTICE PALに対して紫に点灯させ、点灯後1秒で消灯させるコマンドです。
本コマンドを試す場合、送信間隔を必ず点灯時間より大きく設定してご使用ください。
:0190020104000802FF00015E
^1^2^3^4^5^6^7^8^9^a^b^c
番号 バイト数 意味 データ例 データ例の内容 備考 1 1 送信先の論理デバイスID 01 送信先の論理デバイスIDは0x01 2 1 コマンド種別 90 0x90コマンド 90固定 3 1 コマンド数 02 コマンドは2個 4 1 コマンドパラメータID 01 コマンドパラメータID 0x01 5 1 色 04 紫 6 1 点滅パターン 00 点灯 7 1 明るさ 08 明るさ8 0x00~0x0Fまで 8 1 コマンドパラメータID 02 コマンドパラメータID 0x02 9 1 未使用領域 FF a 1 未使用領域 00 b 1 点灯時間 01 点灯後1秒で消える c 1 チェックサム 5E
1.3.3.2.1.2 - 親機・中継機アプリの中継機モード 子機や親機から受信したデータを再送信する
中継機モードでは、受信したパケットを再送信することで、子機と親機の通信距離を延ばすことができます。
中継したとき、親機が受信するパケットの順番が入れ替わってしまうことがあります。
100ms程度など短い間隔で連続的に送信する子機がいる際には、中継が間に合わない場合があります。本番環境でよく検証のうえご利用ください。
設定例 中継機として使用するには、インタラクティブモードの動作モード を1以上としてください。
中継方式 TWELITE NETでは無線パケットの中継配送について、大きく分けて下表で示す2つの方式を用意しており、アプリケーションごとに異なります。本アプリでは下表で示すアプリケーションのパケットを識別し、中継することができます。
中継方式 対応アプリ 単純ネット 超簡単!標準アプリ、リモコンアプリ、シリアル通信アプリ、アクト 中継ネット 無線タグアプリ、パルアプリ、キューアプリ
単純ネットを使用した中継 単純ネットを使用するアプリの中継を行う場合、動作モードの値を1以上に設定することで3回まで中継することができます。
例えば、1. のように親機と子機の間に中継機が3台以内であれば親機にデータが届きますが、2. ように中継機が4台以上ある場合は親機にデータが届きません。
1. 子機 ---> 中継機 ---> 中継機 ---> 中継機 ---> 親機
→ 親機が子機のデータを3回中継して受信できる。
2. 子機 ---> 中継機 ---> 中継機 ---> 中継機 ---> 中継機 -x-> 親機\
→ 中継4回目で中継することをやめる。
単純ネットによる中継は、基本的に同報通信を使用して通信を行い、受信したパケットをすべて中継を行います。そのため、中継ネットワークを形成、維持するための通信が必要ないという利点がありますが、中継機が増えるほど爆発的に通信量が多くなることがあるという欠点もあります。
詳しくは こちら を参照ください。
中継ネットを使用した中継 中継ネットを使用するアプリのデータを1段の中継を行う場合、動作モードの値を1に設定してしてください。
複数回の中継を行う場合は、親機から遠くなるにつれて動作モードの設定値を大きくしてください。(設定値が昇順になっていれば設定値が飛んでもかまいません。)
本方式の最大中継回数は63回までです。
例1:1回の中継を行う場合\
子機 ---> 中継機(動作モード:1) ---> 親機
例2:2回の中継を行う場合\
子機 ---> 中継機(動作モード:2) ---> 中継機(動作モード:**1**) ---> 親機
例3:3回の中継を行う場合\
子機 ---> 中継機(動作モード:6) ---> 中継機(動作モード:3) ---> 中継機(動作モード:1) ---> 親機
中継ネットは上り方向の配送を効率的に実施する目的を持って設計されたツリー型ネットワークで、中継機は上位レイヤ(より動作モードの設定値が小さい親機もしくは中継機)を探索し、発見した上位レイヤ1台に対して中継を行います。
そのため、中継機の台数が増えても単純ネットほどは通信量が多くなりにくいですが、接続先を探索、維持するための通信が発生します。
詳しくは こちら をご覧ください。
静的ルーティング(中継先を直接指定)をする場合 中継ネットでの中継を行うときに、下図のような配置を考えた場合、中継機2の接続先は親機もしくは中継機1のどちらかを自動的に選択します。
基本的には、中継する回数が少ない方が親機への配送率が高くなる場合が多いですが、中継機2の接続先として親機が選択されてしまった場合、親機と中継機2の間に障害物があるため、通信品質が悪くなり、親機への配送率が中継機1を経由するときより低くなる可能性が高くなります。
そのため、本アプリには中継機の接続先を TWELITE のシリアル番号で指定する機能 (静的ルーティング機能) があります。
静的ルーティングを行う場合は、中継機2→中継機1への経路を静的にする、または全ての経路を静的に設定します。
すべての経路の設定にはその分だけ設定が多くなり、また、中継機の故障や電波状況の変化といった状況を想定した冗長化に対応できない点がありますが、上位通信先を確定するまでの時間をなくし、速やかに中継動作に移行できる利点があります。
静的ルーティングをするには下表のように中継機1には親機のSID、中継機2には中継機1のSIDになるように接続先を設定してください。
例: 2段中継の場合 (親機 ← 中継機1 ← 中継機2 ← 子機)
TWELITEのSID例 接続先(A: Access Point Address)の設定例 動作モード(l:Mode)の設定例 親機 810F155E - 0 中継機1 810E18E8 810F155E (親機のSID)※ 1 中継機2 810F17FF 810E18E8 (中継機1のSID) 2
※上図の壁による影響のみに対処したい場合は設定不要です。
1.3.3.2.2 - インタラクティブモード(親機・中継機アプリ) インタラクティブモードによる詳細な設定変更
インタラクティブモードでアプリの詳細設定を行うことができます。
ここでは親機・中継機アプリ(App_Wings)に固有の機能を説明します。共通機能については、TWELITE APPS マニュアル のトップページ を参照してください。
表示例 次のような画面を表示します。
[CONFIG MENU/App_Wings:0/v1-02-1/SID=820163B2]
a: (0x67720102) Application ID [HEX:32bit]
c: (18 ) Channels Set
x: ( 0x03) RF Power/Retry [HEX:8bit]
b: (38400,8N1 ) UART Baud [9600-230400]
o: (0x00000000) Option Bits [HEX:32bit]
k: (0xA5A5A5A5) Encryption Key [HEX:32bit]
m: ( 0) Mode (Parent or Router)
A: (0x00000000) Access point address [HEX:32bit]
[ESC]:Back [!]:Reset System [M]:Extr Menu コマンド 各コマンドの詳細を次に示します。
a:アプリケーションID通信を行う端末はすべて同一の値とします。論理的にネットワークを分離します。
c:周波数チャネル通信を行う端末はすべて同一の値とします。物理的にネットワークを分離します。
x:送信出力と再送回数電波の送信出力と、パケットを追加で送信する回数を指定します。
b:UART代替設定オプションビットのUART代替設定の有効化 を設定した場合のUARTオプションを指定します。
値にはボーレートとパリティの設定をカンマで区切って指定します。
ボーレートは、9600/19200/38400/57600/115200/230400から選択できます。他の値を指定すると、誤差が生じる可能性があります。
パリティはN: 無し、O: Odd(奇数)、E: Even(偶数)を設定します。ハードウェアフローは設定できません。8N1, 7E2 などと設定できますが、8N1 以外の設定は未検証です。事前に動作をご確認ください。
o:オプションビット32bit の数値を指定します。各ビットに紐付いた設定を有効化できます。
k:暗号化鍵オプションビットの暗号化通信の有効化 を設定した場合の暗号化鍵を32bitの16進数で指定します。
m:動作モード0は親機モード、1は中継機モードへ設定します。
中継機モードで多段中継を行う ときには、2-63とすることで中継機のレイヤを指定できます。
A:中継先中継機モードで静的ルーティングを行う ときに接続する上位段の端末のシリアルID(0x8???????)を指定します。このとき、0x00000000とした場合は自動検索します。
オプションビットの詳細 オプションビットの値の各ビットに紐付いた設定を解説します。
00000200:UART代替設定の有効化b:UART代替設定
00000400:定期送信パケットの出力を停止超簡単!標準アプリとリモコンアプリの1秒毎の定期送信と連続モード時のUART出力を停止します。
00001000:暗号化通信の有効化暗号化通信を有効にします。相手側の暗号化通信も有効化する必要があります。
00002000:暗号化通信時の平文受信を有効化暗号化通信を有効とした際に、暗号化していないパケットも受信するようにします。
1.3.4 - リモコンアプリ マニュアル デジタル信号の伝送
デジタル信号の伝送に特化したファームウェアです。超簡単!標準アプリと比較して豊富な機能を備えています。
1.3.4.1 - リモコンアプリ マニュアル 最新版
導入方法 リモコンアプリ(App_IO)を導入するには TWELITE STAGE SDK をインストールして、TWELITE STAGE アプリを使って書き換え てください。[アプリ書換] → [TWELITE APPSビルド&書換] → [App_IO]を選択します。
機能 12個までのスイッチ等の接点入力を無線送信できます。
超簡単!標準アプリ(App_Twelite)との違いは次の通りです。
ポート数が増加し、最大12ポートを使用できる 入出力の割り当ては4種類(12:0, 8:4, 6:6, 0:12) 外部配線で周波数チャネルを4種類から選択できる。 通信を暗号化できる 特定の相手とのみ通信できる(アプリケーションIDの自動設定) 1.3.4.1.1 - リモコンアプリのピン配置 リモコンアプリが使用するピンの機能
TWELITE / TWELITE DIP リモコンアプリが使用するピンの機能を、下図の超簡単!標準アプリのピン 名を使って表します。
超簡単!標準アプリのピン配置表
電源入力 VCC/GND には、3.3V(2.0-3.6V)の電源を接続します。
デジタル入出力 子機:12入力0出力/親機:12出力0入力 デフォルトの入出力の割り当て。
名称 子機 親機 標準 DIP # I1/O5I1O5DI115 I2/O6I2O6DI216 I3/O7I3O7DI317 I4/O8I4O8DI418 I5/O1I5O1DO15 I6/O2I6O2DO28 I7/O3I7O3DO39 I8/O4I8O4DO412 I9/O9I9O9SCL2 I10/O10I10O10SDA19 I11/O11I11O11PWM14 I12/O12I12O12PWM411
子機:8入力4出力/親機:8出力4入力 オプションビット:0x00001000 の設定を有効とした場合の入出力の割り当て。
名称 子機 親機 標準 DIP # I1/O5I1I1DI115 I2/O6I2I2DI216 I3/O7I3I3DI317 I4/O8I4I4DI418 I5/O1O1O1DO15 I6/O2O2O2DO28 I7/O3O3O3DO39 I8/O4O4O4DO412 I9/O9I5O5SCL2 I10/O10I6O6SDA19 I11/O11I7O7PWM14 I12/O12I8O8PWM411
子機:6入力6出力/親機:6出力6入力 オプションビット:0x00002000 の設定を有効とした場合の入出力の割り当て。
名称 子機 親機 標準 DIP # I1/O5I1I1DI115 I2/O6I2I2DI216 I3/O7I3I3DI317 I4/O8I4I4DI418 I5/O1O1O1DO15 I6/O2O2O2DO28 I7/O3O3O3DO39 I8/O4O4O4DO412 I9/O9O5I5SCL2 I10/O10O6I6SDA19 I11/O11I5O5PWM14 I12/O12I6O6PWM411
子機:0入力12出力/親機:0出力12入力 オプションビット:0x00003000 の設定を有効とした場合の入出力の割り当て。
名称 子機 親機 標準 DIP # I1/O5O5I1DI115 I2/O6O6I2DI216 I3/O7O7I3DI317 I4/O8O8I4DI418 I5/O1O1I5DO15 I6/O2O2I6DO28 I7/O3O3I7DO39 I8/O4O4I8DO412 I9/O9O9I9SCL2 I10/O10O10I10SDA19 I11/O11O11I11PWM14 I12/O12O12I12PWM411
シリアル入出力 TX/RX は、リモコン(UART)の送信と受信に使用します。
3.3V レベルのため、Arduino など 5V レベルで動作するマイコン等と接続する場合はレベル変換を行ってください。
ステータスLED出力 アプリケーションID自動設定時のステータス出力を行う際に使用します。
出力が Lo のとき光るようにしてください(吸い込み方式)。
設定入力 モード設定入力 Mxピンを未接続またはGNDへ接続することで、親機、子機、中継機といった動作モードを切り替える ことができます。
代替ボーレート設定入力 BPSピンを未接続またはGNDへ接続することで、UART のボーレート(通信速度)を 115200bps 以外の値へ変更 できます。
チャネル設定入力 一時的に周波数チャネルを上書きします。
間欠モードでは、これらのピンをプルアップするか、
無効化 してください。暗電流が発生するおそれがあります。
リセット入力 RSTとGNDとの間にプッシュボタンを接続することで、リセットボタンを実装できます。RSTは内部プルアップされています。
1.3.4.1.2 - リモコンアプリの動作モード 各動作モードの説明
リモコンアプリ(App_IO)には、6つの動作モードがあります。
動作モードの一覧 各モードは、Mx ピンを未接続または GND へ接続することで設定します。
M3M2M1モード 機能 省電力動作 LID初期値 O O O 子機:連続 入力状態を親機へ送信するほか、常に受信データを待機して出力へ反映します 120O O G 親機:連続 入力状態を子機へ送信するほか、常に受信データを待機して出力へ反映します 0O G O 中継機:連続 常に受信データを待機して中継します 122O G G 子機:連続0.03秒 頻繁に入力状態を親機へ送信するほか、常に受信データを待機して出力へ反映します 123G O O 子機:間欠1秒 1秒おきに入力状態を親機へ送信するほか、受信を無効化して常に節電モードへ入ります ✅ 124G G O (ペアリングモード) 詳細 G G G 子機:間欠10秒 10秒おきに入力状態を親機へ送信するほか、受信を無効化して常に節電モードへ入ります ✅ 127
O:未接続(OPEN)、G:GNDへ接続
初期状態は子機:連続モードです。
モードによって端末を識別するための論理デバイスID(LID)の初期値は異なります。
親機または中継機モードに限り、インタラクティブモード で切り替えできます。
親機は121、中継機は122としてください。
親機 連続モード 親機:連続モード 信号入力の変化を検知したとき、また1秒おきに、すべての子機へデータを送信します。
また子機から送信されるデータを常時待機しており、反応がよいものの、常に電力を消費します。
子機 連続モード 子機:連続モード 信号入力の変化を検知したとき、また1秒おきに、すべての親機へデータを送信します。
また親機から送信されるデータを常時待機しており、反応がよいものの、常に電力を消費します。
親機との通信のイメージ
定期送信の無効化 インタラクティブモードでオプションビット 0x00000020 を設定することで、1秒おきの定期送信を無効化できます。
子機:連続0.03秒モード 子機:連続モードの定期送信の間隔は1秒ですが、これを0.03秒に短縮するモードです。
親機から送信されるデータを常時待機しているものの、子機から親機への通信で帯域を占有してしまうため、親機の入力に対する反応は鈍くなってしまいます。常に電力を消費します。
親機との通信のイメージ
1台の子機だけでほとんどの帯域を占有してしまうため、同時に複数の子機を使用することはなるべく避けてください。
間欠モード 子機:間欠1秒モード 信号入力の変化を検知したとき、また1秒おきに節電モードを解除し、すべての親機へデータを送信します。
受信機能を無効とするため、親機の制御を受けることはできません。省電力性能に優れたモードです。
親機との通信のイメージ
子機:間欠10秒モード 信号入力の変化を検知したとき、また10秒おきに節電モードを解除し、すべての親機へデータを送信します。
受信機能を無効とするため、親機の制御を受けることはできません。省電力性能に優れたモードです。
親機との通信のイメージ
中継機 連続モード 中継機:連続モード 中継機は、受信したパケットを送信します。
親機と子機の間に3つまで設置できますが、中継機を増やすとパケットの数が増大するため、干渉しやすくなることに注意してください。
中継のイメージ
1.3.4.1.3 - リモコンアプリの代替ボーレート設定 UART 通信に使用するボーレート設定の変更
リモコンアプリ(App_IO)はデフォルトで 115200 bps のボーレートを UART 通信に使用しますが、これを変更できます。
代替ボーレート設定の有効化 BPS ピンを GND へ接続することで、代替ボーレート設定を有効化できます。
BPS内容 ボーレート 備考 O デフォルト 115200bps G 上書き設定 38400bps 変更 可
O:未接続(OPEN)、G:GNDへ接続
インタラクティブモードのボーレート設定は、代替ボーレートの値を示しています。BPS ピンが GND に接続されていないと、インタラクティブモードの設定値は適用されません。
インタラクティブモードは、UART 通信を利用します。TWELTIE のボーレートを切り替えた際は、インタラクティブモードを使用する前に PC 側のボーレートを合わせなくてはなりません(
TWELITE STAGE アプリの設定変更 )。
1.3.4.1.4 - リモコンアプリのUART機能 UART機能で利用するデータ形式
リモコンアプリ(App_IO)の UART 機能で使用するデータ形式を解説します。
デジタル入出力 0x81:相手端末からの状態通知受信した入力信号の状態を出力します。
データ形式 # データ 内容 備考 charヘッダ :のみ0 uint8送信元の論理デバイスID 1 uint8コマンド番号 0x81のみ2 uint8パケット識別子 0x0Fのみ3 uint8プロトコルバージョン 0x01のみ4 uint8LQI 0-2555 uint32送信元のシリアルID 0x8???????9 uint8送信先の論理デバイスID 10 uint16タイムスタンプ 1秒で64カウント、MSBは内部フラグ 12 uint8中継回数 13 uint16デジタル信号 LSBから順にIxへ対応、0がHigh 15 uint16デジタル信号マスク LSBから順にIxへ対応、1なら有効 17 uint16デジタル信号フラグ LSBから順にIxへ対応、1なら割り込み 19 uint8未使用 内部管理用 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
出力データの例
:01810F01DB8630000200645F000040004F00400049
上記データの解釈 # データ 内容 値 :charヘッダ :010 uint8送信元の論理デバイスID 0x78811 uint8コマンド番号 0x810F2 uint8パケット識別子 0x15013 uint8プロトコルバージョン 0x01DB4 uint8LQI 219/255863000025 uint32送信元のシリアルID 0x6300002009 uint8送信先の論理デバイスID 0x00645F10 uint16タイムスタンプ 約401秒 0012 uint8中継回数 0004013 uint16デジタル信号 I7がLo004F15 uint16デジタル信号マスク I7,I1-I4が有効004017 uint16デジタル信号フラグ I7は割り込みにより変化0019 uint8未使用 49uint8チェックサム 0x49charフッタ \rcharフッタ \n
0x80:相手端末の出力変更相手端末の出力信号を制御します。
データ形式 # データ 内容 備考 charヘッダ :のみ0 uint8送信先の論理デバイスID 親機0x00,子機0x01-0x64,全子機0x78 1 uint8コマンド番号 0x80のみ2 uint8書式バージョン 0x01のみ3 uint16デジタル信号 LSBからOxに対応、0でHigh 5 uint16デジタル信号マスク LSBからOxに対応、1で有効 7 uint16未使用 09 uint16未使用 011 uint16未使用 013 uint16未使用 0uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
親機・中継機アプリ(v1.2以前)はこの書式に対応していません。
TWELITE GOLD 版の App_IO v1.3.2 では、送信コマンドが動作しない場合がある不具合が報告されています。
原因は調査中です。TWELITE STICK では、App_Wings v1.3.2 (TWELITE Apps統合版も可)をご利用ください。
UART 入出力 1.3.4.1.5 - リモコンアプリのカスタムデフォルト機能 デフォルトの設定を変更したファームウェアの作成
カスタムデフォルト機能によって、ファームウェアに含まれるデフォルトのパラメータを変更できます。
例えば、ボーレートを 115200bps から 9600bps へ変更したファームウェアを作成しておけば、最初から 9600bps で使用できます。
設定手順 1. 設定を適用 インタラクティブモード の設定を変更し、Sを押下して保存します。
2. 設定内容をダウンロード xmodem プロトコルのデータをダウンロードできるソフトウェアを用意します。
xmodem の仕様はチェックサム/128バイトパケットです。拡張された 1KB や CRC の形式は使用しません。
再度インタラクティブモードへ入った状態(項目を選ぶ前の状態)として、xmodem のダウンロードを要求します。
TeraTerm では、次の操作を行います。
ファイル > 転送 > XMODEM > 受信... を選択Option > Checksum, Binary を選択ファイル名を指定(例:conf.bin) 開く ボタンを押下
macOS や Linux 等では、lrzsz
lrx --binary --xmodem /path/to/conf.bin 通常は screen でインタラクティブモードへ入り、Ctrl+A の押下後 :exec !! lrx -b -X /path/to/conf.bin を実行します
ダウンロードに成功すると、128バイトのファイルを生成します(xmodem の実装によっては、小さいサイズになることもあります)。
3. カスタムバイナリの作成 ダウンロードしたファイルをファームウェアのバイナリファイルの末尾へ連結し、カスタムバイナリを作成します。
連結には、コマンドラインツールや汎用のファイル連結ツールを使用してください。
実行例 ダウンロードした xmodem のファイルを conf.bin、元のバイナリファイルをApp_IO_BLUE_L1305_V1-3-X.bin、作成するカスタムバイナリをApp_IO_custom_V1-3-X.binとした場合の例を示します。
【Windows】
copy App_IO_BLUE_L1305_V1-3 -X.bin App_IO_custom_V1-3 -X.bin
type conf.bin >> App_IO_custom_V1-3 -X.bin 【macOS / Linux】
cat App_IO_BLUE_L1305_V1-3-X.bin conf.bin > App_IO_custom_V1-3-X.bin 4. カスタムバイナリの書き込み 連結したカスタムバイナリを TWELITE へ書き込みます。
カスタムバイナリを書き込んでからインタラクティブモードへ入ると、最初の行の末尾に C- を表示します。
--- CONFIG/APP_IO V1-04-2/SID=0x81001f1c/LID=0x78 C- --- カスタムバイナリに対してインタラクティブモードから設定を上書きして保存すると、C-の代わりにCEと表示します。
--- CONFIG/APP_IO V1-04-2/SID=0x81001f1c/LID=0x78 CE --- 1.3.4.1.6 - リモコンアプリのペアリング機能 アプリケーションIDの自動設定による親機と子機のグループ化
リモコンアプリ(App_IO)には、インタラクティブモードを使わずに親機と子機のグループを作成する機能があります。
「ペアリング」といっても、Bluetooth のペアリングとは異なります。
あくまでもアプリケーションIDを共有するだけであり、同報通信の仕組み は変わりません。
設定方法 親機のシリアルIDに基づいたアプリケーションIDを生成し、それを子機へ流し込むことでグループを作成します。LED
接続の様子
親機と子機の LED へ LED と 電流制限抵抗(680Ω)を接続する(吸い込み) M1を開放したまま、M2とM3をGNDへ接続する親機の電源を入れて、LED の点滅を確認する 5秒以内に親機の近くで子機の電源を入れ、LED が消灯することを確認する(失敗すると点灯) 1.3.4.1.7 - インタラクティブモード(リモコンアプリ) インタラクティブモードによる設定変更
インタラクティブモードでアプリの詳細設定を行うことができます。
ここではリモコンアプリ(App_IO)に固有の機能を説明します。共通機能については、TWELITE APPS マニュアル のトップページ を参照してください。
TWELITE がスリープしている間はインタラクティブモードを使用できません。
M3ピンGNDへ接続していないことを確認してください。
表示例 次のような画面を表示します。
--- CONFIG/APP_IO V1-03-2/SID=0x86300001/LID=0x00 ---
a: set Application ID (0x67720107)
i: set Device ID (--)
c: set Channels (16)
x: set Tx Power (3)
t: set mode4 sleep dur (1000ms)
y: set mode7 sleep dur (0s)
f: set mode3 fps (16)
d: set hold mask (000000000000)
D: set hold dur (1000ms)
o: set Option Bits (0x00000000)
b: set UART baud (38400)
p: set UART parity (N)
C: set crypt mode (0)
K: set crypt key []
---
S: save Configuration
R: reset to Defaults コマンド 各コマンドの詳細を次に示します。
a:アプリケーションID通信を行う端末はすべて同一の値とします。論理的にネットワークを分離します。
i:論理デバイスID複数の子機を識別する必要がある場合に設定します。
識別の必要がない、できない場合は120としてください。識別の必要がある場合は、子機は1-100の任意の値に、親機は0あるいは121としてください。
c:周波数チャネル通信を行う端末はすべて同一の値とします。物理的にネットワークを分離します。
x:送信出力と再送回数電波の送信出力と、透過モードおよびヘッダ付き透過モードにおいてパケットを追加で送信する回数を指定します。
t:子機間欠1秒モードの間隔子機間欠1秒モードの間欠時間を1秒から他の値へ上書きします。単位はミリ秒です。
0を設定した場合は、タイマによる定期的な起床を無効化します。このときIxの立ち下がりエッジにより起床しますが、立ち上がりエッジでは起床しません。
y:子機間欠10秒モードの間隔子機間欠10秒モードの間欠時間を10秒から他の値へ上書きします。単位は秒です。
0を設定した場合は、タイマによる定期的な起床を無効化します。このときIxの立ち下がりエッジにより起床しますが、立ち上がりエッジでは起床しません。
f:子機連続0.03秒モードのサイクル毎秒の送信リクエストの数を32回から4/8/16回へ上書きします。再送回数は含みません。
d:ホールド/長押しモードの対象初期状態ではホールドモードの、オプションビット0x00000100 を有効としたときはリモコン長押しモードの対象とするポートを選択します。
設定値には、対象とするIxまたはOxのビットマスクを指定します。値は12文字までの0または1で構成します。LSBから順に I1 I2 … I12 と並びます。
例えば 000000001010 を指定すると、I2とI4にホールドモードを適用できます。任意のピンを対象とした場合、対象としていないポートからは50msのパルスを出力します。
ホールドモード ホールドモードの場合、対象としたポートは次のように振るまいます。
入力(送信)側:Ix すべての入力がLoからHiへ戻ったあと、設定した時間 にわたり連続して送信します(ホールド解除のため) 出力(受信)側:Ox 受信した入力のうち、Loであるものに対しては、設定した時間 にわたり出力をLoのままホールドします いずれかの出力のホールド中に再び入力がLoの信号を受信した際は、ホールドする期間を延長します リモコン長押しモード リモコン長押しモードの場合、対象としたポートは次のように振るまいます。
入力(送信)側:Ix いずれかの入力がLoである間、連続して送信します すべての入力がLoからHiへ戻ったあと、設定した時間 にわたり連続して送信します 出力(受信)側:Ox いずれかの入力がLoであるパケットが断絶してから設定した時間 が経過すると、出力をHiへ戻します D:ホールド/長押しモードの時間初期状態ではホールドモードを、オプションビット0x00000100 を有効としたときはリモコン長押しモードのホールド時間や送信間隔といった値を指定することができます。
20-64000 ms の値を指定できます。
ホールドモード ホールドモードの場合、設定した時間は次のように適用されます。
入力(送信)側:Ix 連続モードでは、すべての入力がLoからHiへ戻ったあとに連続して送信する時間を指定します。
間欠モードでは、いずれかの入力がLoである間の送信間隔を指定します。
出力(受信)側:Ox 出力を維持する時間を指定します。
リモコン長押しモード リモコン長押しモードの場合、設定した時間は次のように適用されます。
入力(送信)側:Ix すべての入力がLoからHiへ戻ったあとに連続して送信する時間を指定します。
出力(受信)側:Ox いずれかの入力がLoのパケットが断絶してからすべての出力をHiへ戻すまでの時間を指定します。
o:オプションビット32bit の数値を指定します。各ビットに紐付いた設定を有効化できます。
b:UART代替ボーレートBPSピンをGNDへ接続して起動した場合に選択される代替ボーレートを38400bpsから上書きします。
値は9600/19200/38400/57600/115200/230400から選択できます。他の値を指定すると、誤差が生じる可能性があります。
BPSピンを開放して起動した場合、この設定は適用されません。115200bpsに固定されます。
B:UARTパリティN: 無し、O: Odd(奇数)、E: Even(偶数)のいずれかを設定します。ストップビットは1のみ、ハードウェアフローは設定不可です。
C:暗号化暗号化機能の有無を指定します。
AES128bitの暗号化を有効とするには、1を指定してください。
K:暗号鍵暗号化に用いる鍵を入力します。16文字のテキストを指定します(バイナリ列は指定できません)。
オプションビットの詳細 オプションビットの値の各ビットに紐付いた設定を解説します。
0x00000001:低レイテンシモード低レイテンシモードで入力状態の監視と無線送信を行います。
ボタン監視の時間を短縮し、送信遅延を最小にします。また、連続モードでは入力の判定に割り込みを使用しますが、チャタリングの影響を受けやすくなります。間欠モードでは、入力状態の確定までの時間を短縮します。
子機のみ有効です。
0x00000002:低レイテンシモード(スリープ割り込み)間欠モード時にスリープ復帰要因がIxのHiからLoへの割り込みであったとき、割り込み要因のポート情報を速やかに送信します。
特に子機間欠10秒モードにおいて、定期起床を無効としたとき、ボタンの押し下げを検出するためにホールドモードと合わせて利用します。
子機のみ有効です。
0x00000010:ACKつき送信の有効化子機から ACK を有効とした通信を行います。親機が ACK を返した時点で送信は終了します。
複数台の親機やすべての中継機は利用できませんが、親機と安定して通信できる環境では効率のよい通信を実現できます。
子機間欠10秒モードの場合、BPSピンが出力ピンとして設定されるため、子機側のボーレートの上書きはできません。
0x00000020:定期送信の無効化子機連続モードにおける1秒おきの定期送信を無効化します。
0x00000100:リモコン長押しモードの有効化ホールドモードの代わりに、リモコン長押しモードを適用します。
0x00000200:C1/C2チャネル切り替えの無効化C1/C2ピンによるチャネル切り替え機能を停止します。
0x00000400:Ixの入力を反転入力が Hi のとき1を、Lo のとき0を送信します。
デフォルトでは、プルアップを想定しているため、入力が Hi のとき0を、 Lo のとき1を送信します。
0x00000800:Ixの内部プルアップを停止Ixの内部プルアップ(約50kΩ)をすべて停止します。
起動してからハードウェアの初期化を完了するまでの約1msの期間はプルアップされます。
0x00001000:子機:8入力4出力/親機:8出力4入力入出力ポートの割り当てを「子機:12入力0出力/親機:12出力0入力」から変更します。間欠モードでは間欠受信を行います。
0x00002000:子機:6入力6出力/親機:6出力6入力入出力ポートの割り当てを「子機:12入力0出力/親機:12出力0入力」から変更します。間欠モードでは間欠受信を行います。
0x00003000:子機:0入力12出力/親機:0出力12入力入出力ポートの割り当てを「子機:12入力0出力/親機:12出力0入力」から変更します。間欠モードでは間欠受信を行います。
0x00010000:子機の受信を強制的に有効化連続モードのとき、出力ポートの有無に関わらず強制的に受信を有効化します。
他の端末から受信したデータのUART出力を実現できます。
0x00020000:入出力変化時のUART出力の停止入出力変化時のメッセージ出力を停止します
0x00040000:C2のウォッチドッグ出力を有効化C2ポートからウォッチドッグ出力を行います。
アプリケーションループでIOを制御し、約32Hzの矩形波を出力します。
モジュールのハングアップに備えて、自動復帰のために外部のリセット回路を接続し、モジュールを強制的にリセットする際に使用します。
0x00400000:Oxの出力を反転受信した入力ポートの状態が 0 のとき Lo を、1 のとき Hi を出力します。
デフォルトでは、プルアップを想定しているため、受信した入力ポートの状態が 0 のとき Hi を、1 のとき Lo を出力します。
1.3.5 - シリアル通信アプリ マニュアル シリアル通信の無線化
シリアル通信(UART)の無線伝送に特化したファームウェアです。超簡単!標準アプリと比較して豊富な機能を備えています。
1.3.5.1 - シリアル通信アプリ マニュアル v1.5.1 GOLD 最新版
TWELITE GOLD シリーズにプリインストールされる最新版を対象としています。
BLUE/RED シリーズの安定版はこちら
工場出荷時の TWELITE UART へインストールされています。
ダウンロード シリアル通信アプリ(App_Uart)を導入するには TWELITE STAGE SDK をインストールして、TWELITE STAGE アプリを使って書き換え てください。
1.3.5.1.1 - シリアル通信アプリのピン配置 シリアル通信アプリが使用するピンの機能
TWELITE / TWELITE DIP シリアル通信アプリが使用するピンの機能を、下図の超簡単!標準アプリのピン 名を使って表します。
超簡単!標準アプリのピン配置表
電源入力 VCC/GND には、3.3V(2.0-3.6V)の電源を接続します。
シリアル入出力 TX/RX は、シリアル通信(UART)の送信と受信に使用します。
3.3V レベルのため、Arduino など 5V レベルで動作するマイコン等と接続する場合はレベル変換を行ってください。
シリアル副入出力 TX_SUB(SCL)/RX_SUB(SDA)は、シリアル入出力の副ポートとして利用できます。
シリアル入力許可 RTS(PWM1)が Low レベルのときは、RXへのシリアル入力を受け付けていることを示します。
Hi レベルのときにRXへの入力を抑制することで、取りこぼしを防ぐことが期待されます。
親機/子機の選択 M1をGNDへ接続すると親機、開放またはVCCへ接続すると子機として使用できます。
インタラクティブモードによる設定 この接続を省略し、インタラクティブモードから設定することもできます。
子機へ中継機能を付与 M2を子機設定のときにGNDへ接続することで、中継機能を付与できます。
インタラクティブモードによる設定 この接続を省略し、インタラクティブモードから設定することもできます。
スリープ M3をGNDへ接続すると、本体をスリープさせることができます。
動作モードの上書き EX1 を起動時に GND へ接続しておくことで、動作モードを書式モード(バイナリ)へ上書きできます。
代替ボーレート設定の有効化 BPSをGNDへ接続することで、インタラクティブモードで指定した代替ボーレート設定を有効化できます。
リセット入力 RSTとGNDとの間にプッシュボタンを接続することで、リセットボタンを実装できます。RSTは内部プルアップされています。
インタラクティブモードで起動 SETをGNDへ接続して起動すると、インタラクティブモードに遷移します。
TWELITE UART シリアル通信アプリが使用するピンの機能を、基板に記載された7Pインタフェース(下図の②)のピン名を使って表します。
基板アンテナタイプ
同軸コネクタタイプ
電源入力 VCC/GND には、3.3V(2.0-3.6V)の電源を接続します。
シリアル入出力 TX/RX は、シリアル通信(UART)の送信と受信に使用します。
Arduino など 5V レベルで動作するマイコンと接続する場合は、レベル変換してください。
動作モードの上書き SET を起動時に GND へ接続することで、動作モードを書式モード(アスキー)へ上書きできます。
リセット入力 RSTとGNDとの間にプッシュボタンを接続することで、リセットボタンを実装できます。RSTは内部プルアップされています。
1.3.5.1.2 - シリアル通信アプリの通信モード 各通信モードの説明
シリアル通信アプリ(App_Uart)には、5つの通信モードがあります。
通信モードの一覧 各モードは、インタラクティブモードによって切り替えます(一部のモードはピン入力にて設定可能)。
初期状態はヘッダ付き透過モード です。
モードに関わらず、送信データは80バイト以内としてください パケットサイズの制約から、一度に送るデータはバイナリ換算で80バイト以内に収めてください。
TWELITE が採用する IEEE 802.15.4 のパケットの最大長は128バイトであり、オーバーヘッドを考慮するとシリアル通信アプリのペイロードに使用できる領域は80バイトに限られます。
大量のデータを送信する場合は、Wi-Fi などを利用した他社製品をご検討ください。TWELITE は少ないデータを効率よく送る用途に適しています。
A:書式モード(アスキー)送信側の端末へ特定の書式に従ったデータを入力すると、受信側の端末も特定の書式に従ったデータを出力します。
16進数で表すデータはアスキー文字列で表現します。
送信側の入力 受信側の出力 簡易形式/拡張形式のデータ → 簡易形式/拡張形式のデータ
TWELITE UART では、SET ピンを GND へ接続して起動すると本モードが有効となります。
データを表現する形式は2種類あります。
簡易形式:論理デバイスIDだけを使用。超簡単!標準アプリのUART伝送機能と互換性あり 拡張形式:論理デバイスIDに加えて、シリアルIDや再送回数などの送信オプションを使用できる 例えば、5バイトのバイナリデータ 0x48 0x45 0x4C 0x4C 0x4F は、簡易形式を使って次のように送信できます。
【送信側】
:000148454C4C4F8B <- 入力
:DBA1800103 <- 出力 【受信側】
書式モードでは、アプリケーションIDなどの設定をインタラクティブモードだけでなく UART によるコマンド(アスキー形式 )によって動的に適用できます。
B:書式モード(バイナリ)送信側の端末へ特定の書式に従ったデータを入力すると、受信側の端末も特定の書式に従ったデータを出力します。
16進数で表すデータはそのままバイナリ形式で表現します。
送信側の入力 受信側の出力 簡易形式/拡張形式のデータ → 簡易形式/拡張形式のデータ
TWELITE / TWELITE DIP では、EX1 ピンを GND へ接続して起動すると本モードが有効となります。
書式モード(アスキー)と同様に、データを表現する形式は2種類あります。
例えば、5バイトのバイナリデータ 0x48 0x45 0x4C 0x4C 0x4F は、簡易形式を使って次のように送信できます。
【送信側】
0xA5 0x5A 0x00 0x07 0x00 0x01 0x48 0x45 0x4C 0x4C 0x4F 0x43 0x04 <- 入力
0xA5 0x5A 0x00 0x04 0xDB 0xA1 0x80 0x01 0xFB 0x04 <- 出力 【受信側】
0xA5 0x5A 0x00 0x07 0x78 0x01 0x48 0x45 0x4C 0x4C 0x4F 0x3B 0x04 <- 出力 書式モードでは、アプリケーションIDなどの設定をインタラクティブモードだけでなく UART によるコマンド(バイナリ形式 )によって動的に適用できます。
C:チャットモードテキストチャットを実現します。
送信側の入力 受信側の出力 任意の文字列 → 補助情報+任意の文字列
プロンプトの表示とエコーバック(入力した文字の出力)を行います。すべての端末は子機として、同報通信を行います。
例えば、ある端末から他の端末へ Hello という文字列を送信する場合は、次のように振る舞います。
【送信側】
810A4778:0> Hello <- 入力
810A4778:1> <- 出力 【受信側】
[810A4778:0] Hello <- 出力
82018CA0:0> <- 出力 上記の例ではプロンプトにシリアルIDを表示していますが、任意のハンドル名を使用することもできます。
D:透過モード送信側の端末へ任意のデータを入力すると、受信側の端末は受信したデータをそのまま出力します。
送信側の入力 受信側の出力 任意のデータ → 任意のデータ
書式を必要としないため、既存の UART 通信を簡単に無線化できます。
一方で、データの区切りがあいまいになってしまうほか、受信側の出力から送信元を判別できないといった欠点があります。
初期状態では、送信側へ入力されたデータをCRLFで区切り、CRLF よりも前のデータを送信します。
例えば、送信側の端末へ Hello<Enter> と入力すると、受信側の端末はそのまま Hello を出力します。
【送信側】
【受信側】
E:ヘッダ付き透過モード送信側の端末へ任意のデータを入力すると、受信側の端末は受信した内容に特定の書式で補助情報を付加したデータを出力します。
送信側の入力 受信側の出力 任意のデータ → 任意のデータ+補助情報
初期状態では、送信側へ入力されたデータをCRLFで区切り、CRLF よりも前のデータを送信します。
例えば、送信側の端末へ Hello<Enter> と入力すると、受信側の端末は補助情報を含んだ書式で Hello を出力します。送信側の端末も送信完了といったメッセージを伝える書式を出力します。
【送信側】
Hello <- 入力
;U;00004;219;0x820163B2;000;000;0,1,Hel...;6E; <- 出力 【受信側】
;U;00003;000;0x820163B2;255;000;Hello;42; <- 出力 受信側が出力する補助情報は、送信元のアドレスや受信時の電波強度、チェックサム等を含みます。補助情報の書式はカスタマイズできます。
1.3.5.1.2.1 - シリアル通信アプリの書式モード(アスキー形式) 送受信双方の出力にヘッダを付加するモード(アスキー形式)
書式モードは、送受信双方の出力にヘッダを付加します。アスキー形式では、データを16進数の文字列で表します。
概要 送信側の端末へ特定の書式に従ったデータを入力すると、受信側の端末も特定の書式に従ったデータを出力します。
データは16進数のアスキー文字列で表現します。
送信側の入力 受信側の出力 簡易形式/拡張形式のデータ → 簡易形式/拡張形式のデータ
TWELITE UART では、SET ピンを GND へ接続して起動すると書式モード(アスキー)が有効となります。 TWELITE / TWELITE DIP では、EX1 ピンを GND へ接続して起動すると書式モード(バイナリ)が有効となります。 扱うことのできる書式の形式は2種類あります。
簡易形式:論理デバイスIDだけを使用する。超簡単!標準アプリのUART伝送機能と互換性あり 拡張形式:論理デバイスIDに加えて、シリアルIDや再送回数などの送信オプションを使用できる 例えば、5バイトのバイナリデータ 0x48 0x45 0x4C 0x4C 0x4F は、簡易形式を使って次のように送信できます。
【送信側】
:000148454C4C4F8B <- 入力
:DBA1800103 <- 出力 【受信側】
基本の書式 基本形式や拡張形式で表現したデータ列を送信するときは、アスキー文字列(0-9,A-F)へ変換します。
書式は超簡単!標準アプリ(App_Twelite)や親機・中継機アプリ(App_Wings)の親機の出力と同様に、:で始まりCRLFで終わります。
ヘッダ ペイロード チェックサム フッタ :00-FFの繰り返しペイロードのLRC8 CRLF
すべて ASCII 文字 先頭は : (0x3A) チェックサムはペイロードの合計の2の補数 末端は CRLF (\r\n/0x0D 0x0A) ビッグエンディアン 例えば、バイナリデータ 0x00 0x11 0x22 0x33 0xAA 0xBB 0xCC は次のように表現します。
:00112233AABBCC69<CR><LF> 親機と子機の区別 書式モードは、親機と子機を区別します。
親子間では、アプリケーションIDと周波数チャネル を合わせる必要があります。
送信元の判別 書式モードでは、受信したデータから送信元を判別できます。
簡易形式の書式では論理デバイスIDを、拡張形式の書式では論理デバイスIDに加えて拡張アドレスを利用します。
拡張アドレスは、TWELITE 本体に記載された7ビットのシリアルIDの先頭へ0x8を付加したものです。
簡易形式の書式 書式モードの簡易形式を利用する場合は、次の書式に従います。
送信側の入力 # データ 内容 備考 charヘッダ :のみ0 uint8送信先の論理デバイスID 親機0x00,子機0x01-0x64,全子機0x78 1 uint8コマンド番号 0x80未満の任意の値2 [uint8]任意のデータ 長さ\(N\)のバイト列(\(N\leqq80\)を推奨) uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
受信側の出力 # データ 内容 備考 charヘッダ :のみ0 uint8送信元の論理デバイスID 親機0x00,子機0x01-0x64,未設定子機0x78 1 uint8コマンド番号 送信側で指定した0x80未満の値 2 [uint8]任意のデータ 長さ\(N\)のバイト列 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
送信側の出力(応答メッセージ) # データ 内容 備考 charヘッダ :のみ0 uint8送信元の論理デバイスID 0xDBのみ:自身を示す1 uint8コマンド番号 0xA1のみ2 uint8応答ID 128-255(0x80-0xFF)の範囲で続き番号を示す3 uint8処理結果 成功1,失敗0 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
使用例 親機から全子機に対してバイト列 0x11 0x22 0x33 0xAA 0xBB 0xCC を送信する例を示します。
【送信側:親機】
:7801112233AABBCCF0<CR><LF> <- 入力
:DBA1800103<CR><LF> <- 出力 末尾の0xF0はチェックサム:0x78から0xCCまでの合計の2の補数のLSBから8ビット。
【受信側:全子機】
:0001112233AABBCC68<CR><LF> <- 出力 末尾の0x68はチェックサム:0x00から0xCCまでの合計の2の補数のLSBから8ビット。
拡張形式の書式 書式モードの拡張形式を利用する場合は、次の書式に従います。
送信側の入力 送信先の指定に論理デバイスIDを使用する場合 # データ 内容 備考 charヘッダ :のみ0 uint8送信先の論理デバイスID 親機0x00,子機0x01-0x64,全子機0x78 1 uint8コマンド番号 0xA0のみ2 uint8応答ID 任意の値 3 [uint8]オプション 長さ\(N\)のオプション列 3+\(N\) [uint8]任意のデータ 長さ\(M\)のバイト列(\(M\leqq80\)を推奨) uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
送信先の指定に拡張アドレスを使用する場合 # データ 内容 備考 charヘッダ :のみ0 uint8拡張アドレスの指定 0x80のみ1 uint8コマンド番号 0xA0のみ2 uint8応答ID 任意の値 3 uint32送信先の拡張アドレス シリアルIDの先頭へ0x8を加えた値 7 [uint8]オプション 長さ\(N\)のオプション列 7+\(N\) [uint8]任意のデータ 長さ\(M\)のバイト列(\(M\leqq80\)を推奨) uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
オプション列の詳細 拡張形式では、オプション列を指定することで細かな設定を行うことができます。
オプション列は、オプションのIDと引数の繰り返しで表現します。終端は 0xFF とします。
オプションを指定しない場合は0xFFの1バイトだけを指定します。
入力後1秒が経過すると、送信処理はタイムアウトします。また、内部のバッファが処理待ちで埋まってしまい、新しい要求を受け付けることができない場合があります。アプリケーション再送や遅延を設定する場合は、極端な値に設定しないように注意してください。
0x01:MAC ACKの有効化MAC層のACK(確認応答)を有効化します。
頻繁にデータを送信する場合には適しませんが、信頼性を向上できる場合があります。
中継機は利用できません。また、送信先を全子機(0x78)とするときは利用できません。
0x02:アプリケーション再送の有効化MAC ACK を使用するときは、0x00-0x0Fを指定します。送信に成功するまで、それぞれ0-16回の再送を行います。
MAC ACK を使用しないときは、0x81-0x8Fを指定します。必ず1-16回の再送を行います。
応答メッセージは、すべての再送が終了してから出力します。
0x03:初回送信の遅延の最小値初回送信までの遅延の最小値をミリ秒で指定できます。
0x04:初回送信の遅延の最大値初回送信までの遅延の最大値をミリ秒で指定できます。
0x05:アプリケーション再送の間隔アプリケーション再送を有効化した際の再送間隔をミリ秒で指定します。
0x06:平行要求の許可平行要求を許可します。
平行要求を許可すると、要求を完了するまでブロックせず、次の要求処理を受け付けることができるようになります。
例えば 0.5 秒の遅延を設定した要求を3回連続して入力した場合、初期状態では 0.5 秒後、1.0秒後、1.5秒後と順番に処理します。ところが、平行要求を許可した場合は、0.5秒後に順不同で送信要求を処理します。なおパケット分割を必要とする場合は使用できません。
受信側の端末は、常に新しいデータを採用します。平行要求を許可していると、新しいデータのあとに古いデータが届き、古いデータが無視されてしまうことがあります。
0x07:応答メッセージの無効化送信側へデータを入力した際に出力される応答メッセージを無効とします。
0x08:送信後スリープ送信後、速やかに本体をスリープさせます。
RXが立ち上がりエッジを検知すると、スリープから復帰します。何か1バイトのデータを入力してください。
スリープ復帰後、UART の初期化が終わると入力を受け付けます。
受信側の出力 # データ 内容 備考 charヘッダ :のみ0 uint8送信元の論理デバイスID 親機0x00,子機0x01-0x64,未設定子機0x78 1 uint8コマンド番号 0xA0のみ2 uint8応答ID 送信側で指定した値 3 uint32送信元の拡張アドレス シリアルIDの先頭へ0x8を加えた値 7 uint32送信先の拡張アドレス 論理デバイスID使用時は0xFFFFFFFF 11 uint8LQI 受信時の電波通信品質 12 uint16続くバイト列の長さ バイト数\(M\)を表す 14 [uint8]任意のデータ 長さ\(M\)のバイト列 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
送信側の出力(応答メッセージ) # データ 内容 備考 charヘッダ :のみ0 uint8送信元の論理デバイスID 0xDBのみ:自身を示す1 uint8コマンド番号 0xA1のみ2 uint8応答ID 入力時に指定した値 3 uint8処理結果 成功1,失敗0 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
使用例 親機から子機に対してバイト列 0x11 0x22 0x33 0xAA 0xBB 0xCC を送信する例を示します。
論理デバイスIDを指定する例 親機から論理デバイスID0x42の子機へ送信する例を示します。
応答IDは0x01 オプションなし 親機の拡張アドレスは0x81000000(シリアルID0x1000000) 【送信側:親機】
:42A001FF112233AABBCC87<CR><LF> <- 入力
:DBA1010182<CR><LF> <- 出力 末尾の0x87はチェックサム:0x42から0xCCまでの合計の2の補数のLSBから8ビット。
【受信側:子機】
:00A00181000000FFFFFFFFC80006112233AABBCC7D<CR><LF> <- 出力 末尾の0x7Dはチェックサム:最初の0x00から0xCCまでの合計の2の補数のLSBから8ビット。
拡張アドレスを指定する例 親機から拡張アドレス0x81000001(シリアルID0x1000001)の子機へ送信する例を示します。
応答IDは0x01 オプションなし 親機の拡張アドレスは0x81000000(シリアルID0x1000000) 【送信側:親機】
:80A00181000001FF112233AABBCCC7<CR><LF> <- 入力
:DBA1010182<CR><LF> <- 出力 末尾の0xC7はチェックサム:0x80から0xCCまでの合計の2の補数のLSBから8ビット。
【受信側:子機】
:00A0018100000081000001C80006112233AABBCCF7<CR><LF> <- 出力 末尾の0xF7はチェックサム:最初の0x00から0xCCまでの合計の2の補数のLSBから8ビット。
MAC ACKを使用する例 親機から論理デバイスID0x42の子機へ MAC ACK を使用して送信する例を示します。
【送信側:親機】
:42A00101FF112233AABBCC86<CR><LF> <- 入力
:DBA1010182<CR><LF> <- 出力 末尾の0x86はチェックサム:0x42から0xCCまでの合計の2の補数のLSBから8ビット。
【受信側:子機】
:00A00181000000FFFFFFFFC80006112233AABBCC7D<CR><LF> <- 出力 末尾の0x7Dはチェックサム:0x00から0xCCまでの合計の2の補数のLSBから8ビット。
遅延を設ける例 親機から論理デバイスID0x42の子機へ 768ms の遅延を設けて送信する例を示します。
【送信側:親機】
:42A001030300FF112233AABBCC81<CR><LF> <- 入力
:DBA1010182<CR><LF> <- 出力 末尾の0x81はチェックサム:0x42から0xCCまでの合計の2の補数のLSBから8ビット。
【受信側:子機】
:00A00181000000FFFFFFFFC80006112233AABBCC7D<CR><LF> <- 出力 末尾の0x7Dはチェックサム:0x00から0xCCまでの合計の2の補数のLSBから8ビット。
0xDB コマンドインタラクティブモードの設定を行う代わりに、UART から 0xDB コマンドを入力することでモジュールの操作や設定を行うことができます。
1.3.5.1.2.1.1 - シリアル通信アプリ 書式モード(アスキー)の 0xDB コマンド 書式モード(アスキー)におけるインタラクティブモードを使用しない設定機能
書式モードでは、インタラクティブモードの代わりに0xDBコマンドを使うことで、UART接続されたデバイスから動的に設定を行えます。
入力の書式 # データ 内容 備考 charヘッダ :のみ0 uint8送信先の論理デバイスID 自身を示す0xDBのみ 1 uint8コマンド番号 後述の値 から選択2 [uint8]パラメータ 設定値を示す長さ\(N\)のバイト列(オプション) uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
コマンド番号の一覧 0xF0:ACKの有効化ACK 応答の要求を行います。
パラメータはありません。
応答の書式 # データ 内容 備考 charヘッダ :のみ0 uint8送信先の論理デバイスID 0xDBのみ1 uint8コマンド番号 0xF0のみ2 uint8データ 0x01のみuint8チェックサム 0x34:LRC8charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
0xF1:端末情報の取得アドレス等の情報を表示します。起動時にも出力されます。
パラメータはありません。
応答の書式 # データ 内容 備考 charヘッダ :のみ0 uint8送信先の論理デバイスID 0xDBのみ1 uint8コマンド番号 0xF1のみ2 uint32既定のアプリケーションID 677201036 uint32バージョン番号 1.4.7なら0001040710 uint8論理デバイスID 11 uint32シリアルID 15 uint8サイレントモードの状態 有効1, 無効0 16 uint8ネットワークの状態 UP1, DOWN0 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
0xF2:端末設定の適用設定を適用します。
適用するパラメータは、
下記に記載 の識別子とデータの組み合わせで構成します。
応答の書式 成功した場合 # データ 内容 備考 charヘッダ :のみ0 uint8送信先の論理デバイスID 0xDBのみ1 uint8コマンド番号 0xF3のみ2 [uint8]設定内容 長さ\(N\)の識別子とデータ uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
失敗した場合 # データ 内容 備考 charヘッダ :のみ0 uint8送信先の論理デバイスID 0xDBのみ1 uint8コマンド番号 0xF3のみ2 uint8エラー 0xFFのみuint8チェックサム 0x33:LRC8charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
0xF3:端末設定の取得設定を取得します。
取得するパラメータは、
下記に記載 の識別子で構成します。
応答の書式 # データ 内容 備考 charヘッダ :のみ0 uint8送信先の論理デバイスID 0xDBのみ1 uint8コマンド番号 0xF3のみ2 [uint8]設定内容 識別子とデータ の繰り返しuint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
0xFD:端末設定の消去設定を初期化し、本体をリセットします。
パラメータおよび応答はありません。
動作モードがEヘッダ付き透過モードに切り替わるため、以降は0xDBコマンドを使うことができません。
0xFE:端末設定の保存適用した設定を保存し、本体をリセットします。
パラメータおよび応答はありません。
0xFF:端末のリセット適用した設定を破棄し、本体をリセットします。
パラメータおよび応答はありません。
パラメータの一覧(0xF2/0xF3) 0xF2:端末設定の適用0xF3:端末設定の取得
0x00:アプリケーションIDアプリケーションIDを指定します。
0x01:周波数チャネルマスク周波数チャネルのビットマスクを指定します。
使用するチャネルのビットを立てます。例えば、11チャネルを使う場合は1<<11です。
0x02:再送回数と出力電波の送信出力と、透過モードおよびヘッダ付き透過モードにおいてパケットを追加で送信する回数を指定します。
下位の1バイトのみを使用します。そのうち上位の4ビットが再送回数(0-9)、下位の4ビットが送信出力(0-3)です。例えば、8回再送/出力3 であれば 0x0083です。
0x03:論理デバイスID論理デバイスIDを指定します。
0x04:役割子機のみ有効です。以下の値を指定します。通常はネットワーク層を利用しない配送方式を選択してください。
ネットワーク層を利用しない配送方式 0:通常の指定(親機または子機)1-3:中継子機(論理デバイスIDを1-100 または 120とします)1-3の数値は最大中継段数を指します。最大中継段数まで再送を繰り返す方式のため、中継機の配置や数によっては重複したパケットを中継します。ネットワーク層を利用する配送方式 0x05:中継レイヤ中継レイヤの番号です。中継機は中継レイヤ数の上位(より小さい値)の中継機・親機への接続を試みます。役割 を12としているときにだけ有効です。
0x06:通信モード0:透過モード1:書式モード(アスキー)2:書式モード(バイナリ)3:チャットモード4:ヘッダ付き透過モード0x07:ボーレートUART ボーレートを指定します。
0x08:パリティ以下の設定の組み合わせにおいて、設定値の総和を指定します。
例えば、7-E-1 なら 8+2+0=10(0xA) を指定します。
0x09:暗号化機能暗号化機能の有無を指定します。
0x0A:暗号化キー16バイトの暗号化キーを指定します。
インタラクティブモードでは設定できないバイナリ列を格納できます。この場合、インタラクティブモードの表示が崩れる場合があります。
0x0B:ヘッダ書式/ハンドル名ヘッダ付き透過モードのヘッダの書式や、チャットモードのハンドル名を設定します。
0x0C:区切り文字区切り文字列の指定を行います(0x00-0xFF)。
1.3.5.1.2.2 - シリアル通信アプリの書式モード(バイナリ形式) 送受信双方の出力にヘッダを付加するモード(バイナリ形式)
書式モードは、送受信双方の出力にヘッダを付加します。バイナリ形式では、データをそのまま表現します。
概要 送信側の端末へ特定の書式に従ったデータを入力すると、受信側の端末も特定の書式に従ったデータを出力します。
16進数で表すデータは、バイナリデータのまま表現します。
送信側の入力 受信側の出力 簡易形式/拡張形式のデータ → 簡易形式/拡張形式のデータ
TWELITE UART では、SET ピンを GND へ接続して起動すると書式モード(アスキー)が有効となります。 TWELITE / TWELITE DIP では、EX1 ピンを GND へ接続して起動すると書式モード(バイナリ)が有効となります。 扱うことのできる書式の形式は2種類あります。
簡易形式:論理デバイスIDだけを使用。超簡単!標準アプリのUART伝送機能と互換性あり 拡張形式:論理デバイスIDに加えて、シリアルIDや再送回数などの送信オプションを使用できる 例えば、5バイトのバイナリデータ 0x48 0x45 0x4C 0x4C 0x4F は、簡易形式を使って次のように送信できます。
以降、バイナリデータ表現の 0x を省略します。
例えば、0x48 0x45 0x4C 0x4C 0x4F は 48 45 4C 4C 4F と表します。
【送信側】
A5 5A 80 07 00 01 48 45 4C 4C 4F 43 04 <- 入力
A5 5A 80 04 DB A1 80 01 FB 04 <- 出力 【受信側】
A5 5A 80 07 78 01 48 45 4C 4C 4F 3B 04 <- 出力 基本の書式 基本形式や拡張形式で表現したデータ列を送信するときは、バイナリデータのまま扱います。
ヘッダ 長さ ペイロード チェックサム フッタ A5 5Aペイロード長 00-FFの繰り返しペイロードのXOR EOT
すべてバイナリ 先頭は A5 5A の2バイト ペイロード長はバイト数を2バイトで表現、0x8000とORをとる チェックサムはペイロードのXOR 末端は EOT を表す 0x04(入力時は省略可) ビッグエンディアン 例えば、バイナリデータ 00 11 22 33 AA BB CC は次のように表現します。
A5 5A 80 07 00 11 22 33 AA BB CC DD 04 デバッグが面倒ですが、マイコン間の通信では高い効率を誇ります。
親機と子機の区別 書式モードは、親機と子機を区別します。
親子間では、アプリケーションIDと周波数チャネル を合わせる必要があります。
送信元の判別 書式モードでは、受信したデータから送信元を判別できます。
簡易形式の書式では論理デバイスIDを、拡張形式の書式では論理デバイスIDに加えて拡張アドレスを利用します。
拡張アドレスは、TWELITE 本体に記載された7ビットのシリアルIDの先頭へ0x8を付加したものです。
簡易形式の書式 書式モードの簡易形式を利用する場合は、次の書式に従います。
送信側の入力 # データ 内容 備考 uint8ヘッダ 0xA5のみuint8ヘッダ 0x5Aのみuint16データ長 \(N\)+2 0 uint8送信先の論理デバイスID 親機0x00,子機0x01-0x64,全子機0x78 1 uint8コマンド番号 0x80未満の任意の値2 [uint8]任意のデータ 長さ\(N\)のバイト列(\(N\leqq80\)を推奨) uint8チェックサム XOR uint8フッタ EOT (0x04)
受信側の出力 # データ 内容 備考 uint8ヘッダ 0xA5のみuint8ヘッダ 0x5Aのみuint16データ長 \(N\)+2 0 uint8送信元の論理デバイスID 親機0x00,子機0x01-0x64,未設定子機0x78 1 uint8コマンド番号 送信側で指定した0x80未満の値 2 [uint8]任意のデータ 長さ\(N\)のバイト列 uint8チェックサム XOR uint8フッタ EOT (0x04)
送信側の出力(応答メッセージ) # データ 内容 備考 uint8ヘッダ 0xA5のみuint8ヘッダ 0x5Aのみuint16データ長 4 0 uint8送信元の論理デバイスID 0xDBのみ:自身を示す1 uint8コマンド番号 0xA1のみ2 uint8応答ID 128-255(0x80-0xFF)の範囲で続き番号を示す3 uint8処理結果 成功1,失敗0 uint8チェックサム XOR uint8フッタ EOT (0x04)
使用例 親機から全子機に対してバイト列 11 22 33 AA BB CC を送信する例を示します。
【送信側:親機】
A5 5A 80 08 78 01 11 22 33 AA BB CC A4 04 <- 入力
A5 5A 80 04 DB A1 80 01 FB 04 <- 出力 末尾の0xA4はチェックサム:0x78から0xCCまでのXOR。
【受信側:全子機】
A5 5A 80 08 00 01 11 22 33 AA BB CC DC 04 <- 出力 末尾の0xDCはチェックサム:0x00から0xCCまでのXOR。
拡張形式の書式 書式モードの拡張形式を利用する場合は、次の書式に従います。
送信側の入力 送信先の指定に論理デバイスIDを使用する場合 # データ 内容 備考 uint8ヘッダ 0xA5のみuint8ヘッダ 0x5Aのみuint16データ長 \(N\)+\(M\)+3 0 uint8送信先の論理デバイスID 親機0x00,子機0x01-0x64,全子機0x78 1 uint8コマンド番号 0xA0のみ2 uint8応答ID 任意の値 3 [uint8]オプション 長さ\(N\)のオプション列 3+\(N\) [uint8]任意のデータ 長さ\(M\)のバイト列(\(M\leqq80\)を推奨) uint8チェックサム XOR uint8フッタ EOT (0x04)
送信先の指定に拡張アドレスを使用する場合 # データ 内容 備考 uint8ヘッダ 0xA5のみuint8ヘッダ 0x5Aのみuint16データ長 \(N\)+\(M\)+7 0 uint8拡張アドレスの指定 0x80のみ1 uint8コマンド番号 0xA0のみ2 uint8応答ID 任意の値 3 uint32送信先の拡張アドレス シリアルIDの先頭へ0x8を加えた値 7 [uint8]オプション 長さ\(N\)のオプション列 7+\(N\) [uint8]任意のデータ 長さ\(M\)のバイト列(\(M\leqq80\)を推奨) uint8チェックサム XOR uint8フッタ EOT (0x04)
オプション列の詳細 拡張形式では、オプション列を指定することで細かな設定を行うことができます。
オプション列は、オプションのIDと引数の繰り返しで表現します。終端は 0xFF とします。
オプションを指定しない場合は0xFFの1バイトだけを指定します。
入力後1秒が経過すると、送信処理はタイムアウトします。また、内部のバッファが処理待ちで埋まってしまい、新しい要求を受け付けることができない場合があります。アプリケーション再送や遅延を設定する場合は、極端な値に設定しないように注意してください。
0x01:MAC ACKの有効化MAC層のACK(確認応答)を有効化します。
頻繁にデータを送信する場合には適しませんが、信頼性を向上できる場合があります。
中継機は利用できません。また、送信先を全子機(0x78)とするときは利用できません。
0x02:アプリケーション再送の有効化MAC ACK を使用するときは、0x00-0x0Fを指定します。送信に成功するまで、それぞれ0-16回の再送を行います。
MAC ACK を使用しないときは、0x81-0x8Fを指定します。必ず1-16回の再送を行います。
応答メッセージは、すべての再送が終了してから出力します。
0x03:初回送信の遅延の最小値初回送信までの遅延の最小値をミリ秒で指定できます。
0x04:初回送信の遅延の最大値初回送信までの遅延の最大値をミリ秒で指定できます。
0x05:アプリケーション再送の間隔アプリケーション再送を有効化した際の再送間隔をミリ秒で指定します。
0x06:平行要求の許可平行要求を許可します。
平行要求を許可すると、要求を完了するまでブロックせず、次の要求処理を受け付けることができるようになります。
例えば 0.5 秒の遅延を設定した要求を3回連続して入力した場合、初期状態では 0.5 秒後、1.0秒後、1.5秒後と順番に処理します。ところが、平行要求を許可した場合は、0.5秒後に順不同で送信要求を処理します。なおパケット分割を必要とする場合は使用できません。
受信側の端末は、常に新しいデータを採用します。平行要求を許可していると、新しいデータのあとに古いデータが届き、古いデータが無視されてしまうことがあります。
0x07:応答メッセージの無効化送信側へデータを入力した際に出力される応答メッセージを無効とします。
0x08:送信後スリープ送信後、速やかに本体をスリープさせます。
RXが立ち上がりエッジを検知すると、スリープから復帰します。何か1バイトのデータを入力してください。
スリープ復帰後、UART の初期化が終わると入力を受け付けます。
受信側の出力 # データ 内容 備考 uint8ヘッダ 0xA5のみuint8ヘッダ 0x5Aのみuint16データ長 \(M\)+14 0 uint8送信元の論理デバイスID 親機0x00,子機0x01-0x64,未設定子機0x78 1 uint8コマンド番号 0xA0のみ2 uint8応答ID 送信側で指定した値 3 uint32送信元の拡張アドレス シリアルIDの先頭へ0x8を加えた値 7 uint32送信先の拡張アドレス 論理デバイスID使用時は0xFFFFFFFF 11 uint8LQI 受信時の電波通信品質 12 uint16続くバイト列の長さ バイト数\(M\)を表す 14 [uint8]任意のデータ 長さ\(M\)のバイト列 uint8チェックサム XOR uint8フッタ EOT (0x04)
送信側の出力(応答メッセージ) # データ 内容 備考 uint8ヘッダ 0xA5のみuint8ヘッダ 0x5Aのみuint16データ長 4 0 uint8送信元の論理デバイスID 0xDBのみ:自身を示す1 uint8コマンド番号 0xA1のみ2 uint8応答ID 入力時に指定した値 3 uint8処理結果 成功1,失敗0 uint8チェックサム XOR uint8フッタ EOT (0x04)
使用例 親機から子機に対してバイト列 11 22 33 AA BB CC を送信する例を示します。
論理デバイスIDを指定する例 親機から論理デバイスID0x01の子機へ送信する例を示します。
【送信側:親機】
A5 5A 80 0A 01 A0 01 FF 11 22 33 AA BB CC 82 04 <- 入力
A5 5A 80 04 DB A1 01 01 7A 04 <- 出力 末尾の0xC1はチェックサム:0x42から0xCCまでのXOR。
【受信側:子機】
A5 5A 80 14 00 A0 01 82 03 68 41 FF FF FF FF FF 00 06 11 22 33 AA BB CC 2D 04 <- 出力 末尾の0x2Dはチェックサム:0x00から0xCCまでのXOR。
拡張アドレスを指定する例 親機から拡張アドレス0x820163B2(シリアルID0x20163B2)の子機へ送信する例を示します。
【送信側:親機】
A5 5A 80 0E 80 A0 01 82 01 63 B2 FF 11 22 33 AA BB CC 51 04 <- 入力
A5 5A 80 04 DB A1 01 01 7A 04 <- 出力 末尾の0x51はチェックサム:0x80から0xCCまでのXOR。
【受信側:子機】
A5 5A 80 14 00 A0 01 82 03 68 41 82 01 63 B2 FF 00 06 11 22 33 AA BB CC 7F 04 <- 出力 末尾の0x7Fはチェックサム:0x00から0xCCまでのXOR。
MAC ACKを使用する例 親機から論理デバイスID0x01の子機へ MAC ACK を使用して送信する例を示します。
【送信側:親機】
A5 5A 80 0B 01 A0 01 01 FF 11 22 33 AA BB CC 83 04 <- 入力
A5 5A 80 04 DB A1 01 01 7A 04 <- 出力 末尾の0x83はチェックサム:0x01から0xCCまでのXOR。
【受信側:子機】
A5 5A 80 14 00 A0 01 82 03 68 41 00 00 01 01 FF 00 06 11 22 33 AA BB CC 2D 04 <- 出力 末尾の0x2Dはチェックサム:0x00から0xCCまでのXOR。
遅延を設ける例 親機から論理デバイスID0x01の子機へ 768ms の遅延を設けて送信する例を示します。
【送信側:親機】
A5 5A 80 0D 01 A0 01 03 03 00 FF 11 22 33 AA BB CC 82 04 <- 入力
A5 5A 80 04 DB A1 01 01 7A 04 <- 出力 末尾の0x82はチェックサム:0x01から0xCCまでのXOR。
【受信側:子機】
A5 5A 80 14 00 A0 01 82 03 68 41 FF FF FF FF FF 00 06 11 22 33 AA BB CC 2D 04 <- 出力 末尾の0x2Dはチェックサム:0x00から0xCCまでのXOR。
0xDB コマンドインタラクティブモードの設定を行う代わりに、UART から 0xDB コマンドを入力することでモジュールの操作や設定を行うことができます。
1.3.5.1.2.2.1 - シリアル通信アプリ 書式モード(バイナリ)の 0xDB コマンド 書式モード(バイナリ)におけるインタラクティブモードを使用しない設定機能
書式モードでは、インタラクティブモードの代わりに0xDBコマンドを使うことで、UART接続されたデバイスから動的に設定を行えます。
入力の書式 # データ 内容 備考 uint8ヘッダ 0xA5のみuint8ヘッダ 0x5Aのみuint16データ長 \(N\)+2 0 uint8送信先の論理デバイスID 自身を示す0xDBのみ 1 uint8コマンド番号 後述の値 から選択2 [uint8]パラメータ 設定値を示す長さ\(N\)のバイト列(オプション) uint8チェックサム XOR uint8フッタ EOT (0x04)
コマンド番号の一覧 0xF0:ACKの有効化ACK 応答の要求を行います。
パラメータはありません。
応答の書式 # データ 内容 備考 uint8ヘッダ 0xA5のみuint8ヘッダ 0x5Aのみuint16データ長 3 0 uint8送信先の論理デバイスID 0xDBのみ1 uint8コマンド番号 0xF0のみ2 uint8データ 0x01のみuint8チェックサム XOR uint8フッタ EOT (0x04)
0xF1:端末情報の取得アドレス等の情報を表示します。起動時にも出力されます。
パラメータはありません。
応答の書式 # データ 内容 備考 uint8ヘッダ 0xA5のみuint8ヘッダ 0x5Aのみuint16データ長 17 0 uint8送信先の論理デバイスID 0xDBのみ1 uint8コマンド番号 0xF1のみ2 uint32既定のアプリケーションID 677201036 uint32バージョン番号 1.4.7なら0001040710 uint8論理デバイスID 11 uint32シリアルID 15 uint8サイレントモードの状態 有効1, 無効0 16 uint8ネットワークの状態 UP1, DOWN0 uint8チェックサム XOR uint8フッタ EOT (0x04)
0xF2:端末設定の適用設定を適用します。
適用するパラメータは、
下記に記載 の識別子とデータの組み合わせで構成します。
応答の書式 成功した場合 # データ 内容 備考 uint8ヘッダ 0xA5のみuint8ヘッダ 0x5Aのみuint16データ長 \(N\)+2 0 uint8送信先の論理デバイスID 0xDBのみ1 uint8コマンド番号 0xF3のみ2 [uint8]設定内容 長さ\(N\)の識別子とデータ uint8チェックサム XOR uint8フッタ EOT (0x04)
失敗した場合 # データ 内容 備考 uint8ヘッダ 0xA5のみuint8ヘッダ 0x5Aのみuint16データ長 3 0 uint8送信先の論理デバイスID 0xDBのみ1 uint8コマンド番号 0xF3のみ2 uint8エラー 0xFFのみuint8チェックサム XOR uint8フッタ EOT (0x04)
0xF3:端末設定の取得設定を取得します。
取得するパラメータは、
下記に記載 の識別子で構成します。
応答の書式 # データ 内容 備考 uint8ヘッダ 0xA5のみuint8ヘッダ 0x5Aのみuint16データ長 \(N\)+2 0 uint8送信先の論理デバイスID 0xDBのみ1 uint8コマンド番号 0xF3のみ2 [uint8]設定内容 長さ\(N\)の識別子とデータ uint8チェックサム XOR uint8フッタ EOT (0x04)
0xFD:端末設定の消去設定を初期化し、本体をリセットします。
パラメータおよび応答はありません。
0xFE:端末設定の保存適用した設定を保存し、本体をリセットします。
パラメータおよび応答はありません。
0xFF:端末のリセット適用した設定を破棄し、本体をリセットします。
パラメータおよび応答はありません。
パラメータの一覧(0xF2/0xF3) 0xF2:端末設定の適用0xF3:端末設定の取得
0x00:アプリケーションIDアプリケーションIDを指定します。
0x01:周波数チャネルマスク周波数チャネルのビットマスクを指定します。
使用するチャネルのビットを立てます。例えば、11チャネルを使う場合は1<<11です。
0x02:再送回数と出力電波の送信出力と、透過モードおよびヘッダ付き透過モードにおいてパケットを追加で送信する回数を指定します。
下位の1バイトのみを使用します。そのうち上位の4ビットが再送回数(0-9)、下位の4ビットが送信出力(0-3)です。例えば、8回再送/出力3 であれば 0x0083です。
0x03:論理デバイスID論理デバイスIDを指定します。
0x04:役割子機のみ有効です。以下の値を指定します。通常はネットワーク層を利用しない配送方式を選択してください。
ネットワーク層を利用しない配送方式 0:通常の指定(親機または子機)1-3:中継子機(論理デバイスIDを1-100 または 120とします)1-3の数値は最大中継段数を指します。最大中継段数まで再送を繰り返す方式のため、中継機の配置や数によっては重複したパケットを中継します。ネットワーク層を利用する配送方式
サイレントモードを有効化するには、上記の数値に80を足してください。例えば 93 は「ネットワーク層利用かつサイレントモード」です。
0x05:中継レイヤ中継レイヤの番号です。中継機は中継レイヤ数の上位(より小さい値)の中継機・親機への接続を試みます。役割 を12としているときにだけ有効です。
0x06:通信モード0:透過モード1:書式モード(バイナリ)2:書式モード(バイナリ)3:チャットモード4:ヘッダ付き透過モード0x07:ボーレートUART ボーレートを指定します。
0x08:パリティ以下の設定の組み合わせにおいて、設定値の総和を指定します。
例えば、7-E-1 なら 8+2+0=10(0xA) を指定します。
0x09:暗号化機能暗号化機能の有無を指定します。
0x0A:暗号化キー16バイトの暗号化キーを指定します。
インタラクティブモードでは設定できないバイナリ列を格納できます。この場合、インタラクティブモードの表示が崩れる場合があります。
0x0B:ヘッダ書式/ハンドル名ヘッダ付き透過モードのヘッダの書式や、チャットモードのハンドル名を設定します。
0x0C:区切り文字区切り文字列の指定を行います(0x00-0xFF)。
1.3.5.1.2.3 - シリアル通信アプリのチャットモード プロンプト表示とエコーバックを行うモード
チャットモードは、プロンプト表示とエコーバックによりテキストチャットを実現します。
MONOSTICK を PC 等へ接続することで、複数の端末同士のチャットを行うことができます。
概要 テキストチャットを実現します。
送信側の入力 受信側の出力 任意の文字列 → 任意の文字列+補助情報
プロンプトの表示とエコーバック(入力した文字の出力)を行います。すべての端末は子機として、同報通信を行います。
例えば、ある端末から他の端末へ Hello という文字列を送信する場合は、次のように振る舞います。
【送信側】
810A4778:0> Hello <- 入力
810A4778:1> <- 出力 【受信側】
[810A4778:0] Hello <- 出力
82018CA0:0> <- 出力 チャットモードは、プロンプトの表示とエコーバック(自身へ入力された文字の出力)を行います。
全ての端末は子機としたうえで、送信内容はブロードキャストします。すべての端末と通信できますが宛て先は指定できません。またバイナリデータは送れません。文字列のみ対応しています(0x00-0x1F, 0x7F は送信不可)。
中継は3段(3ホップ)まで対応しています。初期設定では中継しません。
親機と子機の区別 チャットモードは、親機と子機を区別しません。
アプリケーションIDと周波数チャネル が同一であれば、どの端末へ入力したデータもほかの端末へと送信されます。
ネットワークの構成イメージ
送信元の判別 受信側に出力される補助情報の識別情報から送信元を判別できます。
インタラクティブモードのh: Header formatを空欄としたときは、7桁のシリアルIDの先頭へ0x8を付与した拡張アドレスを使用します。例えば、以下の出力では送信元のシリアルIDが0x10A4778であったと分かります。
インタラクティブモードのh: Header formatへ任意の文字列を設定したときは、それをハンドル名として利用します。ただし、ハンドル名は無線パケットに格納するデータを消費します。
送信側の入力書式 プロンプトに続けて、メッセージと改行文字を入力します。
データ 内容 備考 [char]メッセージ 0x00-0x1F, 0x7Fは不可charCR (0x0D/'\r') 単体でも可 charLF (0x0A/'\n') 単体でも可
受信側の出力書式 補助情報に続けて、受信したメッセージを出力します。
補助情報は、モジュールの拡張アドレスまたはハンドル名と、続き番号を含みます。
データ 内容 備考 char補助情報のヘッダ [のみ[char]識別情報 8桁の拡張アドレスまたはハンドル名 char補助情報の区切り文字 :のみ[char]続き番号 0から開始char補助情報のフッタ ]のみchar区切り文字 半角スペースのみ [char]メッセージ charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
エラー等の場合は、(err) (canceled) といった () 書きのメッセージを出力します。
その他の入力 エスケープシーケンスに対応したターミナルでは、以下の制御コマンドを使用できます。
Ctrl-L:画面のクリアCtrl-C:入力のキャンセルBS/DEL:カーソルを戻す1.3.5.1.2.4 - シリアル通信アプリの透過モード 純粋にUARTを無線化するモード
透過モードは、ヘッダの付加やエコーバック、プロンプト表示を行わず、有線接続された UART と同じような振る舞いを実現します。
外部マイコン同士を簡単に接続できますが、書式を用いて通信を最適化するには書式モード(アスキー /バイナリ )が適しています。
概要 純粋にUARTを無線化します。
送信側の入力 受信側の出力 任意のデータ → 任意のデータ
書式を必要としないため、既存の UART 通信を簡単に無線化できます。
一方で、データの区切りがあいまいになってしまうほか、受信側の出力から送信元を判別できないといった欠点があります。
初期状態では、送信トリガ文字にCRLFを指定しています。したがって、送信側へ入力されたデータをCRLFで区切り、CRLF よりも前のデータを送信します。
例えば、送信側の端末へ Hello<Enter> と入力すると、受信側の端末はそのまま Hello を出力します。
【送信側】
【受信側】
連続して入力された文字列を80バイトごとに分割して送信します。トリガ文字までのデータは通常80バイト以下としてください。
全ての端末は子機としたうえで、送信内容はブロードキャストします。すべての端末と通信できますが宛て先は指定できません。アスキー文字だけでなく、バイナリデータも送信できます。
中継は3段(3ホップ)まで対応しています。初期設定では中継しません。
親機と子機の区別 透過モードは、親機と子機を区別しません。
アプリケーションIDと周波数チャネル が同一であれば、どの端末へ入力したデータもほかの端末へと送信されます。
ネットワークの構成イメージ
送信元の判別 透過モードでは、送信元を判別できません。
送信元を判別するには、送信側へ入力するデータそのものに送信元の情報を含める必要があります。
送信トリガ 送信側の入力に書式はありませんが、データはある時点で分割されたのち、パケットごとに無線で送信されます。
したがって、次に挙げる送信トリガを意識しなくてはなりません。
データ入力後のタイムアウトを迎えたとき 入力データが最小データサイズを満たしたとき 送信トリガ文字を受け取ったとき
送信トリガの優先順位 タイムアウトを迎えたときは、強制的に送信します。また、最小データサイズを設定している場合は、そのサイズを満たしていないと送信トリガ文字は無効となります。
送信トリガの設定は、インタラクティブモードの項目 から指定します。
設定例 送信トリガ文字をLF、最小データサイズを8バイト、タイムアウトを30msとする場合は次のように設定します。
m: set UART mode (D)
k: set Tx Trigger (sep=0x0a, min_bytes=8 dly=30[ms])
o: set option bits (0x00000100) 1.3.5.1.2.5 - シリアル通信アプリのヘッダ付き透過モード 受信側の出力にだけヘッダを付加するモード
ヘッダ付き透過モードは、受信側の出力にだけ補助情報を付加します。
概要 初期状態で有効となっています。
送信側の端末へ任意のデータを入力すると、受信側の端末は受信した内容に特定の書式で補助情報を付加したデータを出力します。
送信側の入力 受信側の出力 任意のデータ → 任意のデータ+補助情報
初期状態では、送信側へ入力されたデータをCRLFで区切り、CRLF よりも前のデータを送信します。
例えば、送信側の端末へ Hello<Enter> と入力すると、受信側の端末は補助情報を含んだ書式で Hello を出力します。送信側の端末も送信完了といったメッセージを伝える書式を出力します。
【送信側】
Hello <- 入力
;U;00004;219;0x820163B2;000;000;0,1,Hel...;6E; <- 出力 【受信側】
;U;00003;000;0x820163B2;255;000;Hello;42; <- 出力 受信側が出力する補助情報は、送信元のアドレスや受信時の電波強度、チェックサム等を含みます。補助情報の書式はカスタマイズできます。
親機と子機の区別 ヘッダ付き透過モードは、親機と子機を区別しません。
アプリケーションIDと周波数チャネル が同一であれば、どの端末へ入力したデータもほかの端末へと送信されます。
ネットワークの構成イメージ
送信元の判別 ヘッダ付き透過モードで受信したデータからは、送信元を判別できます。
受信側が出力する補助情報を表すヘッダに含むことのできる論理デバイスID やシリアルIDのデータを利用します。
宛先を指定することはできません。受信側へ接続されたデバイスが判別しなくてはなりません。
受信側の出力書式 出力書式はセミコロン(;)区切りとして表現されます。
【初期状態における出力例】
;U;00777;120;0x81025A17;120;013;HELLO;79; この出力例は、次のように解釈できます。
データ 内容 値 Uchar固定値 U00777uint16出力時のタイムスタンプ 777 秒120uint8送信元の論理デバイスID 120 IDなし子機0x81025A17uint32送信元の拡張アドレス 81025A17120uint8LQI(電波通信品質) 120/255013uint8送信元の続き番号 13HELLO[uint8]入力データ HELLO79uint8XORチェックサム 0x79
送信元の論理デバイスIDは、自身の応答メッセージのとき219となります。
拡張アドレスは、TWELITE 本体に記載された7ビットのシリアルIDの先頭へ0x8を付加したものです。
ヘッダフォーマットによるカスタマイズ 受信側の出力書式は、ヘッダフォーマットに従います。
ヘッダフォーマットを変更することで、受信側が出力する補助情報の内容やチェックサムの計算範囲をカスタマイズできます。
初期状態では、ヘッダフォーマットを ;U;%t;%i;0x%A;%q;%s;<*;%X;\n としています。
ヘッダフォーマットの変更は、インタラクティブモードの h: set header format から行います。
最も簡単な書式 最も簡単な書式を表すヘッダフォーマットは *\n です。受信したデータへ CRLF の改行文字を付与して出力します。
h: set header format [*\n] この場合にHELLOを送信すると、次のように振る舞います。
【受信側】
HELLO<CR><LF> または HELLO<LF> 【送信側】
フォーマットを構成する特殊文字 ヘッダフォーマットに次の特殊文字を含めることで、出力内容をカスタマイズできます。
全般 内容 *受信したデータ &hl任意の文字(アスキー)(例:&20は空白) <チェックサム計算の開始位置(未設定で先頭から) >チェックサム計算の終了位置(v1.4.6以降のみ)
\(バックスラッシュ・¥)に続くもの内容 \nCRLF (0x0D 0x0A) \tTAB \**\%%\<<\>>\&&
%に続くもの内容 長さ データ %A送信元アドレス(32bit) 8桁 16進数 %a送信元アドレス(32bit) 10桁 16進数 %I送信元論理アドレス(8bit) 2桁 16進数 %i送信元論理アドレス(8bit) 3桁 10進数 %T現在のシステム時間(秒) 4桁 16進数 %t現在のシステム時間(秒) 5桁 10進数 %S送信元が設定した続き番号 2桁 16進数 %s送信元が設定した続き番号 3桁 16進数 %Q受信時の電波強度 2桁 16進数 %q受信時の電波強度 3桁 10進数 %Xチェックサム 2桁 16進数 %xチェックサム 3桁 10進数
チェックサムの計算 チェックサムはデータの先頭あるいはヘッダフォーマットの<を指定した箇所から%X,%xの直前までを XOR(排他的論理和)にて計算します。
初期状態の例 初期状態ではヘッダフォーマットを ;U;%t;%i;0x%A;%q;%s;<*;%X;\n としており、チェックサムの計算範囲は*;です。
すなわち、HELLO を送信した場合は HELLO; のバイナリデータを対象とするため、チェックサムは0x79です。
【Python による検証コード】
from functools import reduce
def main ():
data = "HELLO;"
checksum = reduce(lambda x, y: x ^ y, data. encode("ascii" ))
print(f " { data} -> { hex(checksum)} " )
if __name__ == "__main__" :
main() # HELLO; -> 0x79 その他の例 例えば、ヘッダフォーマットを ;%I;*;%X とした場合を考えます。
<を指定していないため、チェックサムの計算範囲は;%I;*;です。
すなわち、HELLO を送信した場合は ;000;HELLO; のバイナリデータを対象とするため、チェックサムは 0x49 です。
【Python による検証コード】
from functools import reduce
def main ():
data = ";000;HELLO;"
checksum = reduce(lambda x, y: x ^ y, data. encode("ascii" ))
print(f " { data} -> { hex(checksum)} " )
if __name__ == "__main__" :
main() # ;000;HELLO; -> 0x49 送信トリガ 送信側の入力に書式はありませんが、データはある時点で分割されたのち、パケットごとに無線で送信されます。
したがって、次に挙げる送信トリガを意識しなくてはなりません。
データ入力後のタイムアウトを迎えたとき 入力データが最小データサイズを満たしたとき 送信トリガ文字を受け取ったとき
送信トリガの優先順位 タイムアウトを迎えたときは、強制的に送信します。また、最小データサイズを設定している場合は、そのサイズを満たしていないと送信トリガ文字は無効となります。
送信トリガの設定は、インタラクティブモードの項目 から指定します。
設定例 送信トリガ文字をLF、最小データサイズを8バイト、タイムアウトを30msとする場合は次のように設定します。
m: set UART mode (E)
k: set Tx Trigger (sep=0x0a, min_bytes=8 dly=30[ms])
o: set option bits (0x00000100) 1.3.5.1.3 - インタラクティブモード(シリアル通信アプリ) インタラクティブモードによる設定変更
インタラクティブモードでアプリの詳細設定を行うことができます。
ここではシリアル通信アプリ(App_Uart)に固有の機能を説明します。共通機能については、TWELITE APPS マニュアル のトップページ を参照してください。
TWELITE がスリープしている間はインタラクティブモードを使用できません。
M3ピンGNDへ接続していないことを確認してください。
表示例 次のような画面を表示します。
[CONFIG MENU/App_Uart:0/v1-05-1/SID=8300051A]
a: (0x67720103) アプリケーションID [HEX:32bit]
i: ( 120) 論理デバイスID [1-100,etc]
c: (18 ) 周波数チャネル(複数可) [11-26]
x: ( 0x03) 送信出力と再送回数 [HEX:8bit]
b: (115200,8N1) UART代替ボーレート [XXXXX]
o: (0x00000100) オプションビット [HEX:32bit]
r: ( 0x00) 役割 [0-3,11-13]
l: ( 1) LayerTree中継レイヤ [1-63]
m: (E ) 通信モード [ABCDE]
t: ( 0x0D0A) 送信トリガ文字 [XX,XXYY]
u: ( 0) 最小データサイズ [0,1-80]
T: ( 0) タイムアウト [0,10-200 msec]
h: (;U;%t;%i;0x%A;%q;%s;<*;%X;\n) ヘッダ書式/ハンドル名
C: ( 0) 暗号化 [0,1]
K: (*CRYPT_KEY_HERE*) 暗号鍵 [16文字]
[ESC]:Exit [!]:Reset System [*]:Extr Menu [:]:AppSel コマンド 各コマンドの詳細を次に示します。
a:アプリケーションID通信を行う端末はすべて同一の値とします。論理的にネットワークを分離します。
i:論理デバイスID複数の子機を識別する必要がある場合に設定します。
識別の必要がない、できない場合は120としてください。識別の必要がある場合は、子機は1-100の任意の値に、親機は121としてください。
c:周波数チャネル通信を行う端末はすべて同一の値とします。物理的にネットワークを分離します。
x:送信出力と再送回数電波の送信出力と、透過モードおよびヘッダ付き透過モードにおいてパケットを追加で送信する回数を指定します。
b:UART代替設定BPSピンをGNDへ接続して起動した場合に選択される代替ボーレートを38400bpsから上書きします。
値は9600/19200/38400/57600/115200/230400から選択できます。
BPSピンを開放して起動した場合、この設定は適用されません。115200bpsに固定されます。
BPSピンの状態を無視して強制的に代替ボーレート設定を適用するには、オプションビットの強制的に代替設定を適用 を有効とします。
オプションとして、カンマに続けて Bit-Parity-Stop 3文字を指定できます。
o:オプションビット32bit の数値を指定します。各ビットに紐付いた設定を有効化できます。
r:役割子機のみ有効です。以下の値を指定します。通常はネットワーク層(LayerTree)を利用しない配送方式を選択してください。
ネットワーク層を利用しない配送方式 0:通常の指定(親機または子機)1-3:中継子機(論理デバイスIDを1-100 または 120とします)1-3の数値は最大中継段数を指します。最大中継段数まで再送を繰り返す方式のため、中継機の配置や数によっては重複したパケットを中継します。ネットワーク層を利用する配送方式 書式モードのみ対応しています。
l:LayerTree中継レイヤ中継レイヤの番号です。中継機は中継レイヤ数の上位(より小さい値)の中継機・親機への接続を試みます。役割 を12としているときにだけ有効です。
m:通信モードA:書式モード(アスキー)B:書式モード(バイナリ)C:チャットモードD:透過モードE:ヘッダ付き透過モードt:送信トリガ文字透過モードとヘッダ付き透過モードにおいて、指定された文字が入力された際にパケットの送信を行います。
最小データサイズ を指定した場合、最小データサイズに達するまでは無視されます。
オプションビット 0x00000100(既定で有効)を指定した際に適用されます。
初期状態では、CRLF によるトリガを有効としています。
u:最小データサイズ連続して扱うデータの最小サイズを指定します。受信したデータがこのサイズに達するまでは、送信トリガ文字を無視します。
インタラクティブモードでは、バイト数として1-80の数値を指定します。0で無効となります。初期状態では無効です。
T:タイムアウト最後の入力からパケットを送信するまでの待ち時間を示します。
インタラクティブモードでは、ミリ秒単位で10-200の数値を指定します。0で無効となります。初期状態では無効です。
送信トリガ文字や最小データサイズよりも優先されます。
h:ヘッダ書式/ハンドル名ヘッダ付き透過モードに対してはヘッダのフォーマットを、チャットモードに対してはハンドル名を示します。
ヘッダ(ヘッダ付き透過モード) ヘッダ付き透過モードに対しては、ヘッダのフォーマット書式 を指定します。
ハンドル名(チャットモード) 相手端末に表示するハンドル名を指定します。
最大23文字です。送信するデータ(80バイト)の領域を消費します。
C:暗号化暗号化機能の有無を指定します。
AES128bitの暗号化を有効とするには、1を指定してください。
暗号化機能を有効とした端末は平文のメッセージも受信できますが、Ack 応答は利用できません。
K:暗号鍵暗号化機能を有効とした場合の暗号鍵を16文字で指定します。
オプションビットの詳細 オプションビットの値の各ビットに紐付いた設定を解説します。
00000001:M3の内部プルアップを停止TWELITE DIP におけるスリープ設定用のピン M3 の内部プルアップを停止します。
プルアップ停止時には、オープン状態で起動しないでください。意図せずスリープしてしまう場合があります。
00000100:送信トリガの有効化透過モードまたはヘッダ付き透過モードにおいて、送信トリガの設定 を有効とします。
00000200:新たな入力系列を優先書式モード(アスキー・バイナリ)、透過モード、ヘッダ付き透過モードにおいて、送信完了前に複数の系列が入力された際、新しいものを優先します。
制御値や計測値を連続的に送信し、常に最新のデータを反映させたい場合に有効です。
00001000:応答メッセージを停止書式モード(アスキー・バイナリ)、ヘッダ付き透過モードにおいて、送信完了時の応答メッセージを停止します。
00004000:重複チェッカの緩和受信側において、重複チェッカの条件を緩和します。
重複チェッカは、中継などにより重複して届いてしまったパケットを排除するための仕組みです。
100ms以下など短い間隔で送信を行うと、異なるパケットであっても同一のものであると見なされてしまう場合があります(続き番号が異なる場合も含む)。
送信間隔を短く設定する場合や、たくさんの送信機を同時に使用する際は、この設定を有効としてください。
00010000:強制的に代替設定を適用起動時にBPSピンの入力が Low でなくとも、UARTの代替設定 を適用します。
インタラクティブモードも UART を使用するため、インタラクティブモードを使用するにはPC側のボーレートを合わせる必要があります。
00020000:副ポートへ同時出力シリアル出力TXの内容をシリアル副出力TX_SUBにも適用します。
入出力用のバッファ(入力4KB,出力4KB)は、主ポート・副ポートで半々(入力2KB,出力2KB)の割り当てとなります。
00040000:主ポートの切り替えシリアル入出力TX/RXとシリアル副入出力TX_SUB/RX_SUBを入れ替えます。
中継機能について 通信距離が足りない場合や、障害物があって通信できない場合には、中継機を使用することが有用です。
中継機能を持った端末は、自身が受信したパケットを他の端末へ送信します。
01000000:LEDを無効化TWELITE STICK や MONOSTICK のLEDを点灯しません。
02000000:待機時にLEDを無効化待機時にTWELITE STICK や MONOSTICK のLEDを点灯しません。
中継機能の設定 通常は、インタラクティブモードへ入った状態で役割 の値を1-3へ変更します。初期値は0で、中継機能を持ちません。
1-3の数値は最大中継段数を指します。例えば3を指定すると最大3段まで中継されます。
親機子機の区別をする場合、子機のみ有効です。
中継段数や中継機を増やすと、送信されるパケットも増加します。同一の周波数チャネル内の通信が不安定となってしまう場合があります。
設定例 次のネットワーク構成は、赤色の端末の役割 を0、青色の端末の役割 を3とした場合を示します。
役割の設定による中継の例
赤色の端末を追加すると、赤色の端末同士で最大3段の中継を伴う通信を実現できます。
送信機や受信機を追加する例
1.3.5.1.4 - シリアル通信アプリの通信における注意点 安定した通信を実現するための注意点
安定した通信を実現するための注意点を記載しています。
UART のデータ入出力 UART の入力には、入力側に 4KB、出力側に 4KB のバッファを確保しています。2系統のUARTを出力する場合は、各系統の入力に 2KB、出力に 2KB を利用します。
書式モードやチャットモードでバッファのサイズを意識する場面は多くありませんが、ヘッダ付き透過モードや透過モードで連続的に系列を入力する場合や、書式モードであっても多数の系列を一度に入力する場合は、バッファサイズの上限を意識する必要があります。出力においても、遅いボーレートを設定した場合には、無線で受信したデータの出力が間に合わない可能性があります。
バッファの上限を超えた場合は、その境界でのデータは保護されません。データ抜けが発生します。特に入力側では後述のフロー制御ピンを参照することを検討してください。
UART のフロー制御 入力側のフロー制御については、 RTS ピン同様の振る舞いをするように実装しています。使用するピンは PWM1(DIO5) であり、その対象は主UARTポートです。入力を受け付けないときに High、入力を受け付けるときに Low 状態となります。なお出力側のフロー制御には対応していません。受信側のデバイスでは、十分なボーレートと処理速度を確保してください。
電源投入・リセット直後は High です。UART が初期化されると Low。 UART の入力バッファが 7/8 を超えたときに High となります。下回ると Low。 透過モードでは、パケット送信中は High となります。 無線通信エラーの対策 受信側にデータ抜けが発生する場合は、無線の再送回数を増やしてください。
追加送信するパケットの数を増やすことで、受信の成功率を向上できる場合があります。
再送回数はインタラクティブモード で設定できます(x: set RF Conf)。
1.3.5.1.5 - シリアル通信アプリのカスタムデフォルト機能 デフォルトの設定を変更したファームウェアの作成
カスタムデフォルト機能によって、ファームウェアに含まれるデフォルトのパラメータを変更できます。
BLUE / RED シリーズ向けの単体版のみ対応しています。
例えば、ボーレートを 115200bps から 9600bps へ変更したファームウェアを作成しておけば、最初から 9600bps で使用できます。
設定手順 1. 設定を適用 インタラクティブモード の設定を変更し、Sを押下して保存します。
2. 設定内容をダウンロード xmodem プロトコルのデータをダウンロードできるソフトウェアを用意します。
xmodem の仕様はチェックサム/128バイトパケットです。拡張された 1KB や CRC の形式は使用しません。
再度インタラクティブモードへ入った状態(項目を選ぶ前の状態)として、xmodem のダウンロードを要求します。
TeraTerm では、次の操作を行います。
ファイル > 転送 > XMODEM > 受信... を選択Option > Checksum, Binary を選択ファイル名を指定(例:conf.bin) 開く ボタンを押下
macOS や Linux 等では、lrzsz
lrx --binary --xmodem /path/to/conf.bin 通常は screen でインタラクティブモードへ入り、Ctrl+A の押下後 :exec !! lrx -b -X /path/to/conf.bin を実行します
ダウンロードに成功すると、128バイトのファイルを生成します(xmodem の実装によっては、小さいサイズになることもあります)。
3. カスタムバイナリの作成 ダウンロードしたファイルをファームウェアのバイナリファイルの末尾へ連結し、カスタムバイナリを作成します。
連結には、コマンドラインツールや汎用のファイル連結ツールを使用してください。
実行例 ダウンロードした xmodem のファイルを conf.bin、元のバイナリファイルをApp_Uart_BLUE_L1305_V1-4-X.bin、作成するカスタムバイナリをApp_Uart_custom_V1-4-X.binとした場合の例を示します。
【Windows】
copy App_Uart_BLUE_L1305_V1-4 -X.bin App_Uart_custom_V1-4 -X.bin
type conf.bin >> App_Uart_custom_V1-4 -X.bin 【macOS / Linux】
cat App_Uart_BLUE_L1305_V1-4-X.bin conf.bin > App_Uart_custom_V1-4-X.bin 4. カスタムバイナリの書き込み 連結したカスタムバイナリを TWELITE へ書き込みます。
カスタムバイナリを書き込んでからインタラクティブモードへ入ると、最初の行の末尾に C- を表示します。
--- CONFIG/TWE UART APP V1-04-2/SID=0x81001f1c/LID=0x78 C- --- カスタムバイナリに対してインタラクティブモードから設定を上書きして保存すると、C-の代わりにCEと表示します。
--- CONFIG/TWE UART APP V1-04-2/SID=0x81001f1c/LID=0x78 CE --- 1.3.5.2 - シリアル通信アプリ マニュアル v1.4.7 BLUE/RED 安定版
工場出荷時の TWELITE UART へインストールされています。
ダウンロード シリアル通信アプリ(App_Uart)を導入するには TWELITE STAGE SDK をインストールして、TWELITE STAGE アプリを使って書き換え てください。
1.3.5.2.1 - シリアル通信アプリのピン配置 シリアル通信アプリが使用するピンの機能
以下の情報は、App_Uart v1.2 以降を対象としています。
TWELITE / TWELITE DIP シリアル通信アプリが使用するピンの機能を、下図の超簡単!標準アプリのピン 名を使って表します。
超簡単!標準アプリのピン配置表
電源入力 VCC/GND には、3.3V(2.0-3.6V)の電源を接続します。
シリアル入出力 TX/RX は、シリアル通信(UART)の送信と受信に使用します。
3.3V レベルのため、Arduino など 5V レベルで動作するマイコン等と接続する場合はレベル変換を行ってください。
シリアル副入出力 TX_SUB(SCL)/RX_SUB(SDA)は、シリアル入出力の副ポートとして利用できます。
シリアル入力許可 RTS(PWM1)が Low レベルのときは、RXへのシリアル入力を受け付けていることを示します。
Hi レベルのときにRXへの入力を抑制することで、取りこぼしを防ぐことが期待されます。
親機/子機の選択 M1をGNDへ接続すると親機、開放またはVCCへ接続すると子機として使用できます。
インタラクティブモードによる設定 この接続を省略し、インタラクティブモードから設定することもできます。
子機へ中継機能を付与 M2を子機設定のときにGNDへ接続することで、中継機能を付与できます。
インタラクティブモードによる設定 この接続を省略し、インタラクティブモードから設定することもできます。
スリープ M3をGNDへ接続すると、本体をスリープさせることができます。
動作モードの上書き EX1 を起動時に GND へ接続しておくことで、動作モードを書式モード(バイナリ)へ上書きできます。
代替ボーレート設定の有効化 BPSをGNDへ接続することで、インタラクティブモードで指定した代替ボーレート設定を有効化できます。
リセット入力 RSTとGNDとの間にプッシュボタンを接続することで、リセットボタンを実装できます。RSTは内部プルアップされています。
TWELITE UART シリアル通信アプリが使用するピンの機能を、基板に記載された7Pインタフェース(下図の②)のピン名を使って表します。
基板アンテナタイプ
同軸コネクタタイプ
電源入力 VCC/GND には、3.3V(2.0-3.6V)の電源を接続します。
シリアル入出力 TX/RX は、シリアル通信(UART)の送信と受信に使用します。
Arduino など 5V レベルで動作するマイコンと接続する場合は、レベル変換してください。
動作モードの上書き SET を起動時に GND へ接続することで、動作モードを書式モード(アスキー)へ上書きできます。
リセット入力 RSTとGNDとの間にプッシュボタンを接続することで、リセットボタンを実装できます。RSTは内部プルアップされています。
1.3.5.2.2 - シリアル通信アプリの通信モード 各通信モードの説明
シリアル通信アプリ(App_Uart)には、5つの通信モードがあります。
通信モードの一覧 各モードは、インタラクティブモードによって切り替えます(一部のモードはピン入力にて設定可能)。
初期状態はヘッダ付き透過モード です。
モードに関わらず、送信データは80バイト以内としてください パケットサイズの制約から、一度に送るデータはバイナリ換算で80バイト以内に収めてください。
TWELITE が採用する IEEE 802.15.4 のパケットの最大長は128バイトであり、オーバーヘッドを考慮するとシリアル通信アプリのペイロードに使用できる領域は80バイトに限られます。
大量のデータを送信する場合は、Wi-Fi などを利用した他社製品をご検討ください。TWELITE は少ないデータを効率よく送る用途に適しています。
A:書式モード(アスキー)送信側の端末へ特定の書式に従ったデータを入力すると、受信側の端末も特定の書式に従ったデータを出力します。
16進数で表すデータはアスキー文字列で表現します。
送信側の入力 受信側の出力 簡易形式/拡張形式のデータ → 簡易形式/拡張形式のデータ
TWELITE UART では、SET ピンを GND へ接続して起動すると本モードが有効となります。
データを表現する形式は2種類あります。
簡易形式:論理デバイスIDだけを使用。超簡単!標準アプリのUART伝送機能と互換性あり 拡張形式:論理デバイスIDに加えて、シリアルIDや再送回数などの送信オプションを使用できる 例えば、5バイトのバイナリデータ 0x48 0x45 0x4C 0x4C 0x4F は、簡易形式を使って次のように送信できます。
【送信側】
:000148454C4C4F8B <- 入力
:DBA1800103 <- 出力 【受信側】
書式モードでは、アプリケーションIDなどの設定をインタラクティブモードだけでなく UART によるコマンド(アスキー形式 )によって動的に適用できます。
B:書式モード(バイナリ)送信側の端末へ特定の書式に従ったデータを入力すると、受信側の端末も特定の書式に従ったデータを出力します。
16進数で表すデータはそのままバイナリ形式で表現します。
送信側の入力 受信側の出力 簡易形式/拡張形式のデータ → 簡易形式/拡張形式のデータ
TWELITE / TWELITE DIP では、EX1 ピンを GND へ接続して起動すると本モードが有効となります。
書式モード(アスキー)と同様に、データを表現する形式は2種類あります。
例えば、5バイトのバイナリデータ 0x48 0x45 0x4C 0x4C 0x4F は、簡易形式を使って次のように送信できます。
【送信側】
0xA5 0x5A 0x00 0x07 0x00 0x01 0x48 0x45 0x4C 0x4C 0x4F 0x43 0x04 <- 入力
0xA5 0x5A 0x00 0x04 0xDB 0xA1 0x80 0x01 0xFB 0x04 <- 出力 【受信側】
0xA5 0x5A 0x00 0x07 0x78 0x01 0x48 0x45 0x4C 0x4C 0x4F 0x3B 0x04 <- 出力 書式モードでは、アプリケーションIDなどの設定をインタラクティブモードだけでなく UART によるコマンド(バイナリ形式 )によって動的に適用できます。
C:チャットモードテキストチャットを実現します。
送信側の入力 受信側の出力 任意の文字列 → 補助情報+任意の文字列
プロンプトの表示とエコーバック(入力した文字の出力)を行います。すべての端末は子機として、同報通信を行います。
例えば、ある端末から他の端末へ Hello という文字列を送信する場合は、次のように振る舞います。
【送信側】
810A4778:0> Hello <- 入力
810A4778:1> <- 出力 【受信側】
[810A4778:0] Hello <- 出力
82018CA0:0> <- 出力 上記の例ではプロンプトにシリアルIDを表示していますが、任意のハンドル名を使用することもできます。
D:透過モード送信側の端末へ任意のデータを入力すると、受信側の端末は受信したデータをそのまま出力します。
送信側の入力 受信側の出力 任意のデータ → 任意のデータ
書式を必要としないため、既存の UART 通信を簡単に無線化できます。
一方で、データの区切りがあいまいになってしまうほか、受信側の出力から送信元を判別できないといった欠点があります。
初期状態では、送信側へ入力されたデータをCRLFで区切り、CRLF よりも前のデータを送信します。
例えば、送信側の端末へ Hello<Enter> と入力すると、受信側の端末はそのまま Hello を出力します。
【送信側】
【受信側】
E:ヘッダ付き透過モード送信側の端末へ任意のデータを入力すると、受信側の端末は受信した内容に特定の書式で補助情報を付加したデータを出力します。
送信側の入力 受信側の出力 任意のデータ → 任意のデータ+補助情報
初期状態では、送信側へ入力されたデータをCRLFで区切り、CRLF よりも前のデータを送信します。
例えば、送信側の端末へ Hello<Enter> と入力すると、受信側の端末は補助情報を含んだ書式で Hello を出力します。送信側の端末も送信完了といったメッセージを伝える書式を出力します。
【送信側】
Hello <- 入力
;U;00004;219;0x820163B2;000;000;0,1,Hel...;6E; <- 出力 【受信側】
;U;00003;000;0x820163B2;255;000;Hello;42; <- 出力 受信側が出力する補助情報は、送信元のアドレスや受信時の電波強度、チェックサム等を含みます。補助情報の書式はカスタマイズできます。
1.3.5.2.2.1 - シリアル通信アプリの書式モード(アスキー形式) 送受信双方の出力にヘッダを付加するモード(アスキー形式)
書式モードは、送受信双方の出力にヘッダを付加します。アスキー形式では、データを16進数の文字列で表します。
概要 送信側の端末へ特定の書式に従ったデータを入力すると、受信側の端末も特定の書式に従ったデータを出力します。
データは16進数のアスキー文字列で表現します。
送信側の入力 受信側の出力 簡易形式/拡張形式のデータ → 簡易形式/拡張形式のデータ
TWELITE UART では、SET ピンを GND へ接続して起動すると書式モード(アスキー)が有効となります。 TWELITE / TWELITE DIP では、EX1 ピンを GND へ接続して起動すると書式モード(バイナリ)が有効となります。 扱うことのできる書式の形式は2種類あります。
簡易形式:論理デバイスIDだけを使用する。超簡単!標準アプリのUART伝送機能と互換性あり 拡張形式:論理デバイスIDに加えて、シリアルIDや再送回数などの送信オプションを使用できる 例えば、5バイトのバイナリデータ 0x48 0x45 0x4C 0x4C 0x4F は、簡易形式を使って次のように送信できます。
【送信側】
:000148454C4C4F8B <- 入力
:DBA1800103 <- 出力 【受信側】
基本の書式 基本形式や拡張形式で表現したデータ列を送信するときは、アスキー文字列(0-9,A-F)へ変換します。
書式は超簡単!標準アプリ(App_Twelite)や親機・中継機アプリ(App_Wings)の親機の出力と同様に、:で始まりCRLFで終わります。
ヘッダ ペイロード チェックサム フッタ :00-FFの繰り返しペイロードのLRC8 CRLF
すべて ASCII 文字 先頭は : (0x3A) チェックサムはペイロードの合計の2の補数 末端は CRLF (\r\n/0x0D 0x0A) ビッグエンディアン 例えば、バイナリデータ 0x00 0x11 0x22 0x33 0xAA 0xBB 0xCC は次のように表現します。
:00112233AABBCC69<CR><LF> 親機と子機の区別 書式モードは、親機と子機を区別します。
親子間では、アプリケーションIDと周波数チャネル を合わせる必要があります。
送信元の判別 書式モードでは、受信したデータから送信元を判別できます。
簡易形式の書式では論理デバイスIDを、拡張形式の書式では論理デバイスIDに加えて拡張アドレスを利用します。
拡張アドレスは、TWELITE 本体に記載された7ビットのシリアルIDの先頭へ0x8を付加したものです。
簡易形式の書式 書式モードの簡易形式を利用する場合は、次の書式に従います。
送信側の入力 # データ 内容 備考 charヘッダ :のみ0 uint8送信先の論理デバイスID 親機0x00,子機0x01-0x64,全子機0x78 1 uint8コマンド番号 0x80未満の任意の値2 [uint8]任意のデータ 長さ\(N\)のバイト列(\(N\leqq80\)を推奨) uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
受信側の出力 # データ 内容 備考 charヘッダ :のみ0 uint8送信元の論理デバイスID 親機0x00,子機0x01-0x64,未設定子機0x78 1 uint8コマンド番号 送信側で指定した0x80未満の値 2 [uint8]任意のデータ 長さ\(N\)のバイト列 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
送信側の出力(応答メッセージ) # データ 内容 備考 charヘッダ :のみ0 uint8送信元の論理デバイスID 0xDBのみ:自身を示す1 uint8コマンド番号 0xA1のみ2 uint8応答ID 128-255(0x80-0xFF)の範囲で続き番号を示す3 uint8処理結果 成功1,失敗0 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
使用例 親機から全子機に対してバイト列 0x11 0x22 0x33 0xAA 0xBB 0xCC を送信する例を示します。
【送信側:親機】
:7801112233AABBCCF0<CR><LF> <- 入力
:DBA1800103<CR><LF> <- 出力 末尾の0xF0はチェックサム:0x78から0xCCまでの合計の2の補数のLSBから8ビット。
【受信側:全子機】
:0001112233AABBCC68<CR><LF> <- 出力 末尾の0x68はチェックサム:0x00から0xCCまでの合計の2の補数のLSBから8ビット。
拡張形式の書式 書式モードの拡張形式を利用する場合は、次の書式に従います。
送信側の入力 送信先の指定に論理デバイスIDを使用する場合 # データ 内容 備考 charヘッダ :のみ0 uint8送信先の論理デバイスID 親機0x00,子機0x01-0x64,全子機0x78 1 uint8コマンド番号 0xA0のみ2 uint8応答ID 任意の値 3 [uint8]オプション 長さ\(N\)のオプション列 3+\(N\) [uint8]任意のデータ 長さ\(M\)のバイト列(\(M\leqq80\)を推奨) uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
送信先の指定に拡張アドレスを使用する場合 # データ 内容 備考 charヘッダ :のみ0 uint8拡張アドレスの指定 0x80のみ1 uint8コマンド番号 0xA0のみ2 uint8応答ID 任意の値 3 uint32送信先の拡張アドレス シリアルIDの先頭へ0x8を加えた値 7 [uint8]オプション 長さ\(N\)のオプション列 7+\(N\) [uint8]任意のデータ 長さ\(M\)のバイト列(\(M\leqq80\)を推奨) uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
オプション列の詳細 拡張形式では、オプション列を指定することで細かな設定を行うことができます。
オプション列は、オプションのIDと引数の繰り返しで表現します。終端は 0xFF とします。
オプションを指定しない場合は0xFFの1バイトだけを指定します。
入力後1秒が経過すると、送信処理はタイムアウトします。また、内部のバッファが処理待ちで埋まってしまい、新しい要求を受け付けることができない場合があります。アプリケーション再送や遅延を設定する場合は、極端な値に設定しないように注意してください。
0x01:MAC ACKの有効化MAC層のACK(確認応答)を有効化します。
頻繁にデータを送信する場合には適しませんが、信頼性を向上できる場合があります。
中継機は利用できません。また、送信先を全子機(0x78)とするときは利用できません。
0x02:アプリケーション再送の有効化MAC ACK を使用するときは、0x00-0x0Fを指定します。送信に成功するまで、それぞれ0-16回の再送を行います。
MAC ACK を使用しないときは、0x81-0x8Fを指定します。必ず1-16回の再送を行います。
応答メッセージは、すべての再送が終了してから出力します。
0x03:初回送信の遅延の最小値初回送信までの遅延の最小値をミリ秒で指定できます。
0x04:初回送信の遅延の最大値初回送信までの遅延の最大値をミリ秒で指定できます。
0x05:アプリケーション再送の間隔アプリケーション再送を有効化した際の再送間隔をミリ秒で指定します。
0x06:平行要求の許可平行要求を許可します。
平行要求を許可すると、要求を完了するまでブロックせず、次の要求処理を受け付けることができるようになります。
例えば 0.5 秒の遅延を設定した要求を3回連続して入力した場合、初期状態では 0.5 秒後、1.0秒後、1.5秒後と順番に処理します。ところが、平行要求を許可した場合は、0.5秒後に順不同で送信要求を処理します。なおパケット分割を必要とする場合は使用できません。
受信側の端末は、常に新しいデータを採用します。平行要求を許可していると、新しいデータのあとに古いデータが届き、古いデータが無視されてしまうことがあります。
0x07:応答メッセージの無効化送信側へデータを入力した際に出力される応答メッセージを無効とします。
0x08:送信後スリープ送信後、速やかに本体をスリープさせます。
RXが立ち上がりエッジを検知すると、スリープから復帰します。何か1バイトのデータを入力してください。
スリープ復帰後、UART の初期化が終わると入力を受け付けます。
受信側の出力 # データ 内容 備考 charヘッダ :のみ0 uint8送信元の論理デバイスID 親機0x00,子機0x01-0x64,未設定子機0x78 1 uint8コマンド番号 0xA0のみ2 uint8応答ID 送信側で指定した値 3 uint32送信元の拡張アドレス シリアルIDの先頭へ0x8を加えた値 7 uint32送信先の拡張アドレス 論理デバイスID使用時は0xFFFFFFFF 11 uint8LQI 受信時の電波通信品質 12 uint16続くバイト列の長さ バイト数\(M\)を表す 14 [uint8]任意のデータ 長さ\(M\)のバイト列 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
送信側の出力(応答メッセージ) # データ 内容 備考 charヘッダ :のみ0 uint8送信元の論理デバイスID 0xDBのみ:自身を示す1 uint8コマンド番号 0xA1のみ2 uint8応答ID 入力時に指定した値 3 uint8処理結果 成功1,失敗0 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
使用例 親機から子機に対してバイト列 0x11 0x22 0x33 0xAA 0xBB 0xCC を送信する例を示します。
論理デバイスIDを指定する例 親機から論理デバイスID0x42の子機へ送信する例を示します。
応答IDは0x01 オプションなし 親機の拡張アドレスは0x81000000(シリアルID0x1000000) 【送信側:親機】
:42A001FF112233AABBCC87<CR><LF> <- 入力
:DBA1010182<CR><LF> <- 出力 末尾の0x87はチェックサム:0x42から0xCCまでの合計の2の補数のLSBから8ビット。
【受信側:子機】
:00A00181000000FFFFFFFFC80006112233AABBCC7D<CR><LF> <- 出力 末尾の0x7Dはチェックサム:最初の0x00から0xCCまでの合計の2の補数のLSBから8ビット。
拡張アドレスを指定する例 親機から拡張アドレス0x81000001(シリアルID0x1000001)の子機へ送信する例を示します。
応答IDは0x01 オプションなし 親機の拡張アドレスは0x81000000(シリアルID0x1000000) 【送信側:親機】
:80A00181000001FF112233AABBCCC7<CR><LF> <- 入力
:DBA1010182<CR><LF> <- 出力 末尾の0xC7はチェックサム:0x80から0xCCまでの合計の2の補数のLSBから8ビット。
【受信側:子機】
:00A0018100000081000001C80006112233AABBCCF7<CR><LF> <- 出力 末尾の0xF7はチェックサム:最初の0x00から0xCCまでの合計の2の補数のLSBから8ビット。
MAC ACKを使用する例 親機から論理デバイスID0x42の子機へ MAC ACK を使用して送信する例を示します。
【送信側:親機】
:42A00101FF112233AABBCC86<CR><LF> <- 入力
:DBA1010182<CR><LF> <- 出力 末尾の0x86はチェックサム:0x42から0xCCまでの合計の2の補数のLSBから8ビット。
【受信側:子機】
:00A00181000000FFFFFFFFC80006112233AABBCC7D<CR><LF> <- 出力 末尾の0x7Dはチェックサム:0x00から0xCCまでの合計の2の補数のLSBから8ビット。
遅延を設ける例 親機から論理デバイスID0x42の子機へ 768ms の遅延を設けて送信する例を示します。
【送信側:親機】
:42A001030300FF112233AABBCC81<CR><LF> <- 入力
:DBA1010182<CR><LF> <- 出力 末尾の0x81はチェックサム:0x42から0xCCまでの合計の2の補数のLSBから8ビット。
【受信側:子機】
:00A00181000000FFFFFFFFC80006112233AABBCC7D<CR><LF> <- 出力 末尾の0x7Dはチェックサム:0x00から0xCCまでの合計の2の補数のLSBから8ビット。
0xDB コマンドインタラクティブモードの設定を行う代わりに、UART から 0xDB コマンドを入力することでモジュールの操作や設定を行うことができます。
1.3.5.2.2.1.1 - シリアル通信アプリ 書式モード(アスキー)の 0xDB コマンド 書式モード(アスキー)におけるインタラクティブモードを使用しない設定機能
書式モードでは、インタラクティブモードの代わりに0xDBコマンドを使うことで、UART接続されたデバイスから動的に設定を行えます。
入力の書式 # データ 内容 備考 charヘッダ :のみ0 uint8送信先の論理デバイスID 自身を示す0xDBのみ 1 uint8コマンド番号 後述の値 から選択2 [uint8]パラメータ 設定値を示す長さ\(N\)のバイト列(オプション) uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
コマンド番号の一覧 0xF0:ACKの有効化ACK 応答の要求を行います。
パラメータはありません。
応答の書式 # データ 内容 備考 charヘッダ :のみ0 uint8送信先の論理デバイスID 0xDBのみ1 uint8コマンド番号 0xF0のみ2 uint8データ 0x01のみuint8チェックサム 0x34:LRC8charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
0xF1:端末情報の取得アドレス等の情報を表示します。起動時にも出力されます。
パラメータはありません。
応答の書式 # データ 内容 備考 charヘッダ :のみ0 uint8送信先の論理デバイスID 0xDBのみ1 uint8コマンド番号 0xF1のみ2 uint32既定のアプリケーションID 677201036 uint32バージョン番号 1.4.7なら0001040710 uint8論理デバイスID 11 uint32シリアルID 15 uint8サイレントモードの状態 有効1, 無効0 16 uint8ネットワークの状態 UP1, DOWN0 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
0xF2:端末設定の適用設定を適用します。
適用するパラメータは、
下記に記載 の識別子とデータの組み合わせで構成します。
応答の書式 成功した場合 # データ 内容 備考 charヘッダ :のみ0 uint8送信先の論理デバイスID 0xDBのみ1 uint8コマンド番号 0xF3のみ2 [uint8]設定内容 長さ\(N\)の識別子とデータ の繰り返し uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
失敗した場合 # データ 内容 備考 charヘッダ :のみ0 uint8送信先の論理デバイスID 0xDBのみ1 uint8コマンド番号 0xF3のみ2 uint8エラー 0xFFのみuint8チェックサム 0x33:LRC8charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
0xF3:端末設定の取得設定を取得します。
取得するパラメータは、
下記に記載 の識別子で構成します。
応答の書式 # データ 内容 備考 charヘッダ :のみ0 uint8送信先の論理デバイスID 0xDBのみ1 uint8コマンド番号 0xF3のみ2 [uint8]設定内容 識別子とデータ の繰り返しuint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
0xF8:端末の制御起動時にサイレントモードを有効としていた場合に、これを解除します。
応答の書式 # データ 内容 備考 charヘッダ :のみ0 uint8送信先の論理デバイスID 0xDBのみ1 uint8コマンド番号 0xF8のみ2 uint8データ 0x11のみ3 uint8状態 解除済み1, 未解除0 uint8チェックサム LRC8 charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
0xFD:端末設定の消去設定を初期化し、本体をリセットします。
パラメータおよび応答はありません。
0xFE:端末設定の保存適用した設定を保存し、本体をリセットします。
パラメータおよび応答はありません。
0xFF:端末のリセット適用した設定を破棄し、本体をリセットします。
パラメータおよび応答はありません。
パラメータの一覧(0xF2/0xF3) 0xF2:端末設定の適用0xF3:端末設定の取得
0x00:アプリケーションIDアプリケーションIDを指定します。
0x01:周波数チャネルマスク周波数チャネルのビットマスクを指定します。
使用するチャネルのビットを立てます。例えば、11チャネルを使う場合は1<<11です。
0x02:再送回数と出力電波の送信出力と、透過モードおよびヘッダ付き透過モードにおいてパケットを追加で送信する回数を指定します。
下位の1バイトのみを使用します。そのうち上位の4ビットが再送回数(0-9)、下位の4ビットが送信出力(0-3)です。例えば、8回再送/出力3 であれば 0x0083です。
0x03:論理デバイスID論理デバイスIDを指定します。
0x04:役割子機のみ有効です。以下の値を指定します。通常はネットワーク層を利用しない配送方式を選択してください。
ネットワーク層を利用しない配送方式 0:通常の指定(親機または子機)1-3:中継子機(論理デバイスIDを1-100 または 120とします)1-3の数値は最大中継段数を指します。最大中継段数まで再送を繰り返す方式のため、中継機の配置や数によっては重複したパケットを中継します。ネットワーク層を利用する配送方式
サイレントモードを有効化するには、上記の数値に80を足してください。例えば 93 は「ネットワーク層利用かつサイレントモード」です。
0x05:中継レイヤ中継レイヤの番号です。中継機は中継レイヤ数の上位(より小さい値)の中継機・親機への接続を試みます。役割 を12としているときにだけ有効です。
0x06:通信モード0:透過モード1:書式モード(アスキー)2:書式モード(バイナリ)3:チャットモード4:ヘッダ付き透過モード0x07:ボーレートUART ボーレートを指定します。
0x08:パリティ以下の設定の組み合わせにおいて、設定値の総和を指定します。
例えば、7-E-1 なら 8+2+0=10(0xA) を指定します。
0x09:暗号化機能暗号化機能の有無を指定します。
0x0A:暗号化キー16バイトの暗号化キーを指定します。
インタラクティブモードでは設定できないバイナリ列を格納できます。この場合、インタラクティブモードの表示が崩れる場合があります。
0x0C:区切り文字区切り文字列の指定を行います(0x00-0xFF)。
サイレントモード
サイレントモードでは、起動後に受信回路を動作させず、解除するまでパケットを受信しません。起動後に外部へ接続したマイコンから0xDBコマンドによる設定を完了してから受信を始める際に利用します。
設定方法 インタラクティブモードで以下の設定を行います。
r: Role に 80 を足しておく。例えば、通常の親機や子機なら80とする。m: UART mode を書式モード(A/B)としておく。動作確認 起動直後に出力される DB F1 応答 の内容を確認します。
解除方法 DB F8 要求 を行います(アスキー形式::DBF8101D<CR><LF>)。
注意点 サイレントモードの再設定はできません。 サイレントモードが有効のときに送信コマンドを入力した場合の動作は未定義です。 1.3.5.2.2.2 - シリアル通信アプリの書式モード(バイナリ形式) 送受信双方の出力にヘッダを付加するモード(バイナリ形式)
書式モードは、送受信双方の出力にヘッダを付加します。バイナリ形式では、データをそのまま表現します。
概要 送信側の端末へ特定の書式に従ったデータを入力すると、受信側の端末も特定の書式に従ったデータを出力します。
16進数で表すデータは、バイナリデータのまま表現します。
送信側の入力 受信側の出力 簡易形式/拡張形式のデータ → 簡易形式/拡張形式のデータ
TWELITE UART では、SET ピンを GND へ接続して起動すると書式モード(アスキー)が有効となります。 TWELITE / TWELITE DIP では、EX1 ピンを GND へ接続して起動すると書式モード(バイナリ)が有効となります。 扱うことのできる書式の形式は2種類あります。
簡易形式:論理デバイスIDだけを使用。超簡単!標準アプリのUART伝送機能と互換性あり 拡張形式:論理デバイスIDに加えて、シリアルIDや再送回数などの送信オプションを使用できる 例えば、5バイトのバイナリデータ 0x48 0x45 0x4C 0x4C 0x4F は、簡易形式を使って次のように送信できます。
以降、バイナリデータ表現の 0x を省略します。
例えば、0x48 0x45 0x4C 0x4C 0x4F は 48 45 4C 4C 4F と表します。
【送信側】
A5 5A 80 07 00 01 48 45 4C 4C 4F 43 04 <- 入力
A5 5A 80 04 DB A1 80 01 FB 04 <- 出力 【受信側】
A5 5A 80 07 78 01 48 45 4C 4C 4F 3B 04 <- 出力 基本の書式 基本形式や拡張形式で表現したデータ列を送信するときは、バイナリデータのまま扱います。
ヘッダ 長さ ペイロード チェックサム フッタ A5 5Aペイロード長 00-FFの繰り返しペイロードのXOR EOT
すべてバイナリ 先頭は A5 5A の2バイト ペイロード長はバイト数を2バイトで表現、0x8000とORをとる チェックサムはペイロードのXOR 末端は EOT を表す 0x04(入力時は省略可) ビッグエンディアン 例えば、バイナリデータ 00 11 22 33 AA BB CC は次のように表現します。
A5 5A 80 07 00 11 22 33 AA BB CC DD 04 デバッグが面倒ですが、マイコン間の通信では高い効率を誇ります。
親機と子機の区別 書式モードは、親機と子機を区別します。
親子間では、アプリケーションIDと周波数チャネル を合わせる必要があります。
送信元の判別 書式モードでは、受信したデータから送信元を判別できます。
簡易形式の書式では論理デバイスIDを、拡張形式の書式では論理デバイスIDに加えて拡張アドレスを利用します。
拡張アドレスは、TWELITE 本体に記載された7ビットのシリアルIDの先頭へ0x8を付加したものです。
簡易形式の書式 書式モードの簡易形式を利用する場合は、次の書式に従います。
送信側の入力 # データ 内容 備考 uint8ヘッダ 0xA5のみuint8ヘッダ 0x5Aのみuint16データ長 \(N\)+2 0 uint8送信先の論理デバイスID 親機0x00,子機0x01-0x64,全子機0x78 1 uint8コマンド番号 0x80未満の任意の値2 [uint8]任意のデータ 長さ\(N\)のバイト列(\(N\leqq80\)を推奨) uint8チェックサム XOR uint8フッタ EOT (0x04)
受信側の出力 # データ 内容 備考 uint8ヘッダ 0xA5のみuint8ヘッダ 0x5Aのみuint16データ長 \(N\)+2 0 uint8送信元の論理デバイスID 親機0x00,子機0x01-0x64,未設定子機0x78 1 uint8コマンド番号 送信側で指定した0x80未満の値 2 [uint8]任意のデータ 長さ\(N\)のバイト列 uint8チェックサム XOR uint8フッタ EOT (0x04)
送信側の出力(応答メッセージ) # データ 内容 備考 uint8ヘッダ 0xA5のみuint8ヘッダ 0x5Aのみuint16データ長 4 0 uint8送信元の論理デバイスID 0xDBのみ:自身を示す1 uint8コマンド番号 0xA1のみ2 uint8応答ID 128-255(0x80-0xFF)の範囲で続き番号を示す3 uint8処理結果 成功1,失敗0 uint8チェックサム XOR uint8フッタ EOT (0x04)
使用例 親機から全子機に対してバイト列 11 22 33 AA BB CC を送信する例を示します。
【送信側:親機】
A5 5A 80 08 78 01 11 22 33 AA BB CC A4 04 <- 入力
A5 5A 80 04 DB A1 80 01 FB 04 <- 出力 末尾の0xA4はチェックサム:0x78から0xCCまでのXOR。
【受信側:全子機】
A5 5A 80 08 00 01 11 22 33 AA BB CC DC 04 <- 出力 末尾の0xDCはチェックサム:0x00から0xCCまでのXOR。
拡張形式の書式 書式モードの拡張形式を利用する場合は、次の書式に従います。
送信側の入力 送信先の指定に論理デバイスIDを使用する場合 # データ 内容 備考 uint8ヘッダ 0xA5のみuint8ヘッダ 0x5Aのみuint16データ長 \(N\)+\(M\)+3 0 uint8送信先の論理デバイスID 親機0x00,子機0x01-0x64,全子機0x78 1 uint8コマンド番号 0xA0のみ2 uint8応答ID 任意の値 3 [uint8]オプション 長さ\(N\)のオプション列 3+\(N\) [uint8]任意のデータ 長さ\(M\)のバイト列(\(M\leqq80\)を推奨) uint8チェックサム XOR uint8フッタ EOT (0x04)
送信先の指定に拡張アドレスを使用する場合 # データ 内容 備考 uint8ヘッダ 0xA5のみuint8ヘッダ 0x5Aのみuint16データ長 \(N\)+\(M\)+7 0 uint8拡張アドレスの指定 0x80のみ1 uint8コマンド番号 0xA0のみ2 uint8応答ID 任意の値 3 uint32送信先の拡張アドレス シリアルIDの先頭へ0x8を加えた値 7 [uint8]オプション 長さ\(N\)のオプション列 7+\(N\) [uint8]任意のデータ 長さ\(M\)のバイト列(\(M\leqq80\)を推奨) uint8チェックサム XOR uint8フッタ EOT (0x04)
オプション列の詳細 拡張形式では、オプション列を指定することで細かな設定を行うことができます。
オプション列は、オプションのIDと引数の繰り返しで表現します。終端は 0xFF とします。
オプションを指定しない場合は0xFFの1バイトだけを指定します。
入力後1秒が経過すると、送信処理はタイムアウトします。また、内部のバッファが処理待ちで埋まってしまい、新しい要求を受け付けることができない場合があります。アプリケーション再送や遅延を設定する場合は、極端な値に設定しないように注意してください。
0x01:MAC ACKの有効化MAC層のACK(確認応答)を有効化します。
頻繁にデータを送信する場合には適しませんが、信頼性を向上できる場合があります。
中継機は利用できません。また、送信先を全子機(0x78)とするときは利用できません。
0x02:アプリケーション再送の有効化MAC ACK を使用するときは、0x00-0x0Fを指定します。送信に成功するまで、それぞれ0-16回の再送を行います。
MAC ACK を使用しないときは、0x81-0x8Fを指定します。必ず1-16回の再送を行います。
応答メッセージは、すべての再送が終了してから出力します。
0x03:初回送信の遅延の最小値初回送信までの遅延の最小値をミリ秒で指定できます。
0x04:初回送信の遅延の最大値初回送信までの遅延の最大値をミリ秒で指定できます。
0x05:アプリケーション再送の間隔アプリケーション再送を有効化した際の再送間隔をミリ秒で指定します。
0x06:平行要求の許可平行要求を許可します。
平行要求を許可すると、要求を完了するまでブロックせず、次の要求処理を受け付けることができるようになります。
例えば 0.5 秒の遅延を設定した要求を3回連続して入力した場合、初期状態では 0.5 秒後、1.0秒後、1.5秒後と順番に処理します。ところが、平行要求を許可した場合は、0.5秒後に順不同で送信要求を処理します。なおパケット分割を必要とする場合は使用できません。
受信側の端末は、常に新しいデータを採用します。平行要求を許可していると、新しいデータのあとに古いデータが届き、古いデータが無視されてしまうことがあります。
0x07:応答メッセージの無効化送信側へデータを入力した際に出力される応答メッセージを無効とします。
0x08:送信後スリープ送信後、速やかに本体をスリープさせます。
RXが立ち上がりエッジを検知すると、スリープから復帰します。何か1バイトのデータを入力してください。
スリープ復帰後、UART の初期化が終わると入力を受け付けます。
受信側の出力 # データ 内容 備考 uint8ヘッダ 0xA5のみuint8ヘッダ 0x5Aのみuint16データ長 \(M\)+14 0 uint8送信元の論理デバイスID 親機0x00,子機0x01-0x64,未設定子機0x78 1 uint8コマンド番号 0xA0のみ2 uint8応答ID 送信側で指定した値 3 uint32送信元の拡張アドレス シリアルIDの先頭へ0x8を加えた値 7 uint32送信先の拡張アドレス 論理デバイスID使用時は0xFFFFFFFF 11 uint8LQI 受信時の電波通信品質 12 uint16続くバイト列の長さ バイト数\(M\)を表す 14 [uint8]任意のデータ 長さ\(M\)のバイト列 uint8チェックサム XOR uint8フッタ EOT (0x04)
送信側の出力(応答メッセージ) # データ 内容 備考 uint8ヘッダ 0xA5のみuint8ヘッダ 0x5Aのみuint16データ長 4 0 uint8送信元の論理デバイスID 0xDBのみ:自身を示す1 uint8コマンド番号 0xA1のみ2 uint8応答ID 入力時に指定した値 3 uint8処理結果 成功1,失敗0 uint8チェックサム XOR uint8フッタ EOT (0x04)
使用例 親機から子機に対してバイト列 11 22 33 AA BB CC を送信する例を示します。
論理デバイスIDを指定する例 親機から論理デバイスID0x01の子機へ送信する例を示します。
【送信側:親機】
A5 5A 80 0A 01 A0 01 FF 11 22 33 AA BB CC 82 04 <- 入力
A5 5A 80 04 DB A1 01 01 7A 04 <- 出力 末尾の0xC1はチェックサム:0x42から0xCCまでのXOR。
【受信側:子機】
A5 5A 80 14 00 A0 01 82 03 68 41 FF FF FF FF FF 00 06 11 22 33 AA BB CC 2D 04 <- 出力 末尾の0x2Dはチェックサム:0x00から0xCCまでのXOR。
拡張アドレスを指定する例 親機から拡張アドレス0x820163B2(シリアルID0x20163B2)の子機へ送信する例を示します。
【送信側:親機】
A5 5A 80 0E 80 A0 01 82 01 63 B2 FF 11 22 33 AA BB CC 51 04 <- 入力
A5 5A 80 04 DB A1 01 01 7A 04 <- 出力 末尾の0x51はチェックサム:0x80から0xCCまでのXOR。
【受信側:子機】
A5 5A 80 14 00 A0 01 82 03 68 41 82 01 63 B2 FF 00 06 11 22 33 AA BB CC 7F 04 <- 出力 末尾の0x7Fはチェックサム:0x00から0xCCまでのXOR。
MAC ACKを使用する例 親機から論理デバイスID0x01の子機へ MAC ACK を使用して送信する例を示します。
【送信側:親機】
A5 5A 80 0B 01 A0 01 01 FF 11 22 33 AA BB CC 83 04 <- 入力
A5 5A 80 04 DB A1 01 01 7A 04 <- 出力 末尾の0x83はチェックサム:0x01から0xCCまでのXOR。
【受信側:子機】
A5 5A 80 14 00 A0 01 82 03 68 41 00 00 01 01 FF 00 06 11 22 33 AA BB CC 2D 04 <- 出力 末尾の0x2Dはチェックサム:0x00から0xCCまでのXOR。
遅延を設ける例 親機から論理デバイスID0x01の子機へ 768ms の遅延を設けて送信する例を示します。
【送信側:親機】
A5 5A 80 0D 01 A0 01 03 03 00 FF 11 22 33 AA BB CC 82 04 <- 入力
A5 5A 80 04 DB A1 01 01 7A 04 <- 出力 末尾の0x82はチェックサム:0x01から0xCCまでのXOR。
【受信側:子機】
A5 5A 80 14 00 A0 01 82 03 68 41 FF FF FF FF FF 00 06 11 22 33 AA BB CC 2D 04 <- 出力 末尾の0x2Dはチェックサム:0x00から0xCCまでのXOR。
0xDB コマンドインタラクティブモードの設定を行う代わりに、UART から 0xDB コマンドを入力することでモジュールの操作や設定を行うことができます。
1.3.5.2.2.2.1 - シリアル通信アプリ 書式モード(バイナリ)の 0xDB コマンド 書式モード(バイナリ)におけるインタラクティブモードを使用しない設定機能
書式モードでは、インタラクティブモードの代わりに0xDBコマンドを使うことで、UART接続されたデバイスから動的に設定を行えます。
入力の書式 # データ 内容 備考 uint8ヘッダ 0xA5のみuint8ヘッダ 0x5Aのみuint16データ長 \(N\)+2 0 uint8送信先の論理デバイスID 自身を示す0xDBのみ 1 uint8コマンド番号 後述の値 から選択2 [uint8]パラメータ 設定値を示す長さ\(N\)のバイト列(オプション) uint8チェックサム XOR uint8フッタ EOT (0x04)
コマンド番号の一覧 0xF0:ACKの有効化ACK 応答の要求を行います。
パラメータはありません。
応答の書式 # データ 内容 備考 uint8ヘッダ 0xA5のみuint8ヘッダ 0x5Aのみuint16データ長 3 0 uint8送信先の論理デバイスID 0xDBのみ1 uint8コマンド番号 0xF0のみ2 uint8データ 0x01のみuint8チェックサム XOR uint8フッタ EOT (0x04)
0xF1:端末情報の取得アドレス等の情報を表示します。起動時にも出力されます。
パラメータはありません。
応答の書式 # データ 内容 備考 uint8ヘッダ 0xA5のみuint8ヘッダ 0x5Aのみuint16データ長 17 0 uint8送信先の論理デバイスID 0xDBのみ1 uint8コマンド番号 0xF1のみ2 uint32既定のアプリケーションID 677201036 uint32バージョン番号 1.4.7なら0001040710 uint8論理デバイスID 11 uint32シリアルID 15 uint8サイレントモードの状態 有効1, 無効0 16 uint8ネットワークの状態 UP1, DOWN0 uint8チェックサム XOR uint8フッタ EOT (0x04)
0xF2:端末設定の適用設定を適用します。
適用するパラメータは、
下記に記載 の識別子とデータの組み合わせで構成します。
応答の書式 成功した場合 # データ 内容 備考 uint8ヘッダ 0xA5のみuint8ヘッダ 0x5Aのみuint16データ長 \(N\)+2 0 uint8送信先の論理デバイスID 0xDBのみ1 uint8コマンド番号 0xF3のみ2 [uint8]設定内容 長さ\(N\)の識別子とデータ の繰り返し uint8チェックサム XOR uint8フッタ EOT (0x04)
失敗した場合 # データ 内容 備考 uint8ヘッダ 0xA5のみuint8ヘッダ 0x5Aのみuint16データ長 3 0 uint8送信先の論理デバイスID 0xDBのみ1 uint8コマンド番号 0xF3のみ2 uint8エラー 0xFFのみuint8チェックサム XOR uint8フッタ EOT (0x04)
0xF3:端末設定の取得設定を取得します。
取得するパラメータは、
下記に記載 の識別子で構成します。
応答の書式 # データ 内容 備考 uint8ヘッダ 0xA5のみuint8ヘッダ 0x5Aのみuint16データ長 \(N\)+2 0 uint8送信先の論理デバイスID 0xDBのみ1 uint8コマンド番号 0xF3のみ2 [uint8]設定内容 長さ\(N\)の識別子とデータ の繰り返し uint8チェックサム XOR uint8フッタ EOT (0x04)
0xF8:端末の制御起動時にサイレントモードを有効としていた場合に、これを解除します。
応答の書式 # データ 内容 備考 uint8ヘッダ 0xA5のみuint8ヘッダ 0x5Aのみuint16データ長 4 0 uint8送信先の論理デバイスID 0xDBのみ1 uint8コマンド番号 0xF8のみ2 uint8データ 0x11のみ3 uint8状態 解除済み1, 未解除0 uint8チェックサム XOR uint8フッタ EOT (0x04)
0xFD:端末設定の消去設定を初期化し、本体をリセットします。
パラメータおよび応答はありません。
0xFE:端末設定の保存適用した設定を保存し、本体をリセットします。
パラメータおよび応答はありません。
0xFF:端末のリセット適用した設定を破棄し、本体をリセットします。
パラメータおよび応答はありません。
パラメータの一覧(0xF2/0xF3) 0xF2:端末設定の適用0xF3:端末設定の取得
0x00:アプリケーションIDアプリケーションIDを指定します。
0x01:周波数チャネルマスク周波数チャネルのビットマスクを指定します。
使用するチャネルのビットを立てます。例えば、11チャネルを使う場合は1<<11です。
0x02:再送回数と出力電波の送信出力と、透過モードおよびヘッダ付き透過モードにおいてパケットを追加で送信する回数を指定します。
下位の1バイトのみを使用します。そのうち上位の4ビットが再送回数(0-9)、下位の4ビットが送信出力(0-3)です。例えば、8回再送/出力3 であれば 0x0083です。
0x03:論理デバイスID論理デバイスIDを指定します。
0x04:役割子機のみ有効です。以下の値を指定します。通常はネットワーク層を利用しない配送方式を選択してください。
ネットワーク層を利用しない配送方式 0:通常の指定(親機または子機)1-3:中継子機(論理デバイスIDを1-100 または 120とします)1-3の数値は最大中継段数を指します。最大中継段数まで再送を繰り返す方式のため、中継機の配置や数によっては重複したパケットを中継します。ネットワーク層を利用する配送方式
サイレントモードを有効化するには、上記の数値に80を足してください。例えば 93 は「ネットワーク層利用かつサイレントモード」です。
0x05:中継レイヤ中継レイヤの番号です。中継機は中継レイヤ数の上位(より小さい値)の中継機・親機への接続を試みます。役割 を12としているときにだけ有効です。
0x06:通信モード0:透過モード1:書式モード(バイナリ)2:書式モード(バイナリ)3:チャットモード4:ヘッダ付き透過モード0x07:ボーレートUART ボーレートを指定します。
0x08:パリティ以下の設定の組み合わせにおいて、設定値の総和を指定します。
例えば、7-E-1 なら 8+2+0=10(0xA) を指定します。
0x09:暗号化機能暗号化機能の有無を指定します。
0x0A:暗号化キー16バイトの暗号化キーを指定します。
インタラクティブモードでは設定できないバイナリ列を格納できます。この場合、インタラクティブモードの表示が崩れる場合があります。
0x0C:区切り文字区切り文字列の指定を行います(0x00-0xFF)。
サイレントモード
サイレントモードでは、起動後に受信回路を動作させず、解除するまでパケットを受信しません。起動後に外部へ接続したマイコンから0xDBコマンドによる設定を完了してから受信を始める際に利用します。
設定方法 インタラクティブモードで以下の設定を行います。
r: Role に 80 を足しておく。例えば、通常の親機や子機なら80とする。m: UART mode を書式モード(A/B)としておく。動作確認 起動直後に出力される DB F1 応答 の内容を確認します。
解除方法 DB F8 要求 を行います(バイナリ形式:A5 5A 80 03 DB F8 10 33 04)。
注意点 サイレントモードの再設定はできません。 サイレントモードが有効のときに送信コマンドを入力した場合の動作は未定義です。 1.3.5.2.2.3 - シリアル通信アプリのチャットモード プロンプト表示とエコーバックを行うモード
チャットモードは、プロンプト表示とエコーバックによりテキストチャットを実現します。
MONOSTICK を PC 等へ接続することで、複数の端末同士のチャットを行うことができます。
概要 テキストチャットを実現します。
送信側の入力 受信側の出力 任意の文字列 → 任意の文字列+補助情報
プロンプトの表示とエコーバック(入力した文字の出力)を行います。すべての端末は子機として、同報通信を行います。
例えば、ある端末から他の端末へ Hello という文字列を送信する場合は、次のように振る舞います。
【送信側】
810A4778:0> Hello <- 入力
810A4778:1> <- 出力 【受信側】
[810A4778:0] Hello <- 出力
82018CA0:0> <- 出力 チャットモードは、プロンプトの表示とエコーバック(自身へ入力された文字の出力)を行います。
全ての端末は子機としたうえで、送信内容はブロードキャストします。すべての端末と通信できますが宛て先は指定できません。またバイナリデータは送れません。文字列のみ対応しています(0x00-0x1F, 0x7F は送信不可)。
中継は3段(3ホップ)まで対応しています。初期設定では中継しません。
親機と子機の区別 チャットモードは、親機と子機を区別しません。
アプリケーションIDと周波数チャネル が同一であれば、どの端末へ入力したデータもほかの端末へと送信されます。
ネットワークの構成イメージ
送信元の判別 受信側に出力される補助情報の識別情報から送信元を判別できます。
インタラクティブモードのh: Header formatを空欄としたときは、7桁のシリアルIDの先頭へ0x8を付与した拡張アドレスを使用します。例えば、以下の出力では送信元のシリアルIDが0x10A4778であったと分かります。
インタラクティブモードのh: Header formatへ任意の文字列を設定したときは、それをハンドル名として利用します。ただし、ハンドル名は無線パケットに格納するデータを消費します。
送信側の入力書式 プロンプトに続けて、メッセージと改行文字を入力します。
データ 内容 備考 [char]メッセージ 0x00-0x1F, 0x7Fは不可charCR (0x0D/'\r') 単体でも可 charLF (0x0A/'\n') 単体でも可
受信側の出力書式 補助情報に続けて、受信したメッセージを出力します。
補助情報は、モジュールの拡張アドレスまたはハンドル名と、続き番号を含みます。
データ 内容 備考 char補助情報のヘッダ [のみ[char]識別情報 8桁の拡張アドレスまたはハンドル名 char補助情報の区切り文字 :のみ[char]続き番号 0から開始char補助情報のフッタ ]のみchar区切り文字 半角スペースのみ [char]メッセージ charフッタ CR (0x0D/'\r') charフッタ LF (0x0A/'\n')
エラー等の場合は、(err) (canceled) といった () 書きのメッセージを出力します。
その他の入力 エスケープシーケンスに対応したターミナルでは、以下の制御コマンドを使用できます。
Ctrl-L:画面のクリアCtrl-C:入力のキャンセルBS/DEL:カーソルを戻す1.3.5.2.2.4 - シリアル通信アプリの透過モード 純粋にUARTを無線化するモード
透過モードは、ヘッダの付加やエコーバック、プロンプト表示を行わず、有線接続された UART と同じような振る舞いを実現します。
外部マイコン同士を簡単に接続できますが、書式を用いて通信を最適化するには書式モード(アスキー /バイナリ )が適しています。
概要 純粋にUARTを無線化します。
送信側の入力 受信側の出力 任意のデータ → 任意のデータ
書式を必要としないため、既存の UART 通信を簡単に無線化できます。
一方で、データの区切りがあいまいになってしまうほか、受信側の出力から送信元を判別できないといった欠点があります。
初期状態では、送信トリガ文字にCRLFを指定しています。したがって、送信側へ入力されたデータをCRLFで区切り、CRLF よりも前のデータを送信します。
例えば、送信側の端末へ Hello<Enter> と入力すると、受信側の端末はそのまま Hello を出力します。
【送信側】
【受信側】
連続して入力された文字列を80バイトごとに分割して送信します。トリガ文字までのデータは通常80バイト以下としてください。
全ての端末は子機としたうえで、送信内容はブロードキャストします。すべての端末と通信できますが宛て先は指定できません。アスキー文字だけでなく、バイナリデータも送信できます。
中継は3段(3ホップ)まで対応しています。初期設定では中継しません。
親機と子機の区別 透過モードは、親機と子機を区別しません。
アプリケーションIDと周波数チャネル が同一であれば、どの端末へ入力したデータもほかの端末へと送信されます。
ネットワークの構成イメージ
送信元の判別 透過モードでは、送信元を判別できません。
送信元を判別するには、送信側へ入力するデータそのものに送信元の情報を含める必要があります。
送信トリガ 送信側の入力に書式はありませんが、データはある時点で分割されたのち、パケットごとに無線で送信されます。
したがって、次に挙げる送信トリガを意識しなくてはなりません。
データ入力後のタイムアウトを迎えたとき 入力データが最小データサイズを満たしたとき 送信トリガ文字を受け取ったとき
送信トリガの優先順位 タイムアウトを迎えたときは、強制的に送信します。また、最小データサイズを設定している場合は、そのサイズを満たしていないと送信トリガ文字は無効となります。
送信トリガの設定は、インタラクティブモードのk:送信トリガ
設定例 送信トリガ文字をLF、最小データサイズを8バイト、タイムアウトを30msとする場合は次のように設定します。
m: set UART mode (D)
k: set Tx Trigger (sep=0x0a, min_bytes=8 dly=30[ms])
o: set option bits (0x00000100) 1.3.5.2.2.5 - シリアル通信アプリのヘッダ付き透過モード 受信側の出力にだけヘッダを付加するモード
ヘッダ付き透過モードは、受信側の出力にだけ補助情報を付加します。
概要 初期状態で有効となっています。
送信側の端末へ任意のデータを入力すると、受信側の端末は受信した内容に特定の書式で補助情報を付加したデータを出力します。
送信側の入力 受信側の出力 任意のデータ → 任意のデータ+補助情報
初期状態では、送信側へ入力されたデータをCRLFで区切り、CRLF よりも前のデータを送信します。
例えば、送信側の端末へ Hello<Enter> と入力すると、受信側の端末は補助情報を含んだ書式で Hello を出力します。送信側の端末も送信完了といったメッセージを伝える書式を出力します。
【送信側】
Hello <- 入力
;U;00004;219;0x820163B2;000;000;0,1,Hel...;6E; <- 出力 【受信側】
;U;00003;000;0x820163B2;255;000;Hello;42; <- 出力 受信側が出力する補助情報は、送信元のアドレスや受信時の電波強度、チェックサム等を含みます。補助情報の書式はカスタマイズできます。
親機と子機の区別 ヘッダ付き透過モードは、親機と子機を区別しません。
アプリケーションIDと周波数チャネル が同一であれば、どの端末へ入力したデータもほかの端末へと送信されます。
ネットワークの構成イメージ
送信元の判別 ヘッダ付き透過モードで受信したデータからは、送信元を判別できます。
受信側が出力する補助情報を表すヘッダに含むことのできる論理デバイスID やシリアルIDのデータを利用します。
宛先を指定することはできません。受信側へ接続されたデバイスが判別しなくてはなりません。
受信側の出力書式 出力書式はセミコロン(;)区切りとして表現されます。
【初期状態における出力例】
;U;00777;120;0x81025A17;120;013;HELLO;79; この出力例は、次のように解釈できます。
データ 内容 値 Uchar固定値 U00777uint16出力時のタイムスタンプ 777 秒120uint8送信元の論理デバイスID 120 IDなし子機0x81025A17uint32送信元の拡張アドレス 81025A17120uint8LQI(電波通信品質) 120/255013uint8送信元の続き番号 13HELLO[uint8]入力データ HELLO79uint8XORチェックサム 0x79
送信元の論理デバイスIDは、自身の応答メッセージのとき219となります。
拡張アドレスは、TWELITE 本体に記載された7ビットのシリアルIDの先頭へ0x8を付加したものです。
ヘッダフォーマットによるカスタマイズ 受信側の出力書式は、ヘッダフォーマットに従います。
ヘッダフォーマットを変更することで、受信側が出力する補助情報の内容やチェックサムの計算範囲をカスタマイズできます。
初期状態では、ヘッダフォーマットを ;U;%t;%i;0x%A;%q;%s;<*;%X;\n としています。
ヘッダフォーマットの変更は、インタラクティブモードの h: set header format から行います。
最も簡単な書式 最も簡単な書式を表すヘッダフォーマットは *\n です。受信したデータへ CRLF の改行文字を付与して出力します。
h: set header format [*\n] この場合にHELLOを送信すると、次のように振る舞います。
【受信側】
HELLO<CR><LF> または HELLO<LF> 【送信側】
フォーマットを構成する特殊文字 ヘッダフォーマットに次の特殊文字を含めることで、出力内容をカスタマイズできます。
全般 内容 *受信したデータ &hl任意の文字(アスキー)(例:&20は空白) <チェックサム計算の開始位置(未設定で先頭から) >チェックサム計算の終了位置(v1.4.6以降のみ)
\(バックスラッシュ・¥)に続くもの内容 \nCRLF (0x0D 0x0A) \tTAB \**\%%\<<\>>\&&
%に続くもの内容 長さ データ %A送信元アドレス(32bit) 8桁 16進数 %a送信元アドレス(32bit) 10桁 16進数 %I送信元論理アドレス(8bit) 2桁 16進数 %i送信元論理アドレス(8bit) 3桁 10進数 %T現在のシステム時間(秒) 4桁 16進数 %t現在のシステム時間(秒) 5桁 10進数 %S送信元が設定した続き番号 2桁 16進数 %s送信元が設定した続き番号 3桁 16進数 %Q受信時の電波強度 2桁 16進数 %q受信時の電波強度 3桁 10進数 %Xチェックサム 2桁 16進数 %xチェックサム 3桁 10進数
チェックサムの計算 チェックサムはデータの先頭あるいはヘッダフォーマットの<を指定した箇所から%X,%xの直前までを XOR(排他的論理和)にて計算します。
初期状態の例 初期状態ではヘッダフォーマットを ;U;%t;%i;0x%A;%q;%s;<*;%X;\n としており、チェックサムの計算範囲は*;です。
すなわち、HELLO を送信した場合は HELLO; のバイナリデータを対象とするため、チェックサムは0x79です。
【Python による検証コード】
from functools import reduce
def main ():
data = "HELLO;"
checksum = reduce(lambda x, y: x ^ y, data. encode("ascii" ))
print(f " { data} -> { hex(checksum)} " )
if __name__ == "__main__" :
main() # HELLO; -> 0x79 その他の例 例えば、ヘッダフォーマットを ;%I;*;%X とした場合を考えます。
<を指定していないため、チェックサムの計算範囲は;%I;*;です。
すなわち、HELLO を送信した場合は ;000;HELLO; のバイナリデータを対象とするため、チェックサムは 0x49 です。
【Python による検証コード】
from functools import reduce
def main ():
data = ";000;HELLO;"
checksum = reduce(lambda x, y: x ^ y, data. encode("ascii" ))
print(f " { data} -> { hex(checksum)} " )
if __name__ == "__main__" :
main() # ;000;HELLO; -> 0x49 送信トリガ 送信側の入力に書式はありませんが、データはある時点で分割されたのち、パケットごとに無線で送信されます。
したがって、次に挙げる送信トリガを意識しなくてはなりません。
データ入力後のタイムアウトを迎えたとき 入力データが最小データサイズを満たしたとき 送信トリガ文字を受け取ったとき
送信トリガの優先順位 タイムアウトを迎えたときは、強制的に送信します。また、最小データサイズを設定している場合は、そのサイズを満たしていないと送信トリガ文字は無効となります。
送信トリガの設定は、インタラクティブモードのk:送信トリガ
設定例 送信トリガ文字をLF、最小データサイズを8バイト、タイムアウトを30msとする場合は次のように設定します。
m: set UART mode (E)
k: set Tx Trigger (sep=0x0a, min_bytes=8 dly=30[ms])
o: set option bits (0x00000100) 1.3.5.2.3 - シリアル通信アプリのカスタムデフォルト機能 デフォルトの設定を変更したファームウェアの作成
カスタムデフォルト機能によって、ファームウェアに含まれるデフォルトのパラメータを変更できます。
例えば、ボーレートを 115200bps から 9600bps へ変更したファームウェアを作成しておけば、最初から 9600bps で使用できます。
設定手順 1. 設定を適用 インタラクティブモード の設定を変更し、Sを押下して保存します。
2. 設定内容をダウンロード xmodem プロトコルのデータをダウンロードできるソフトウェアを用意します。
xmodem の仕様はチェックサム/128バイトパケットです。拡張された 1KB や CRC の形式は使用しません。
再度インタラクティブモードへ入った状態(項目を選ぶ前の状態)として、xmodem のダウンロードを要求します。
TeraTerm では、次の操作を行います。
ファイル > 転送 > XMODEM > 受信... を選択Option > Checksum, Binary を選択ファイル名を指定(例:conf.bin) 開く ボタンを押下
macOS や Linux 等では、lrzsz
lrx --binary --xmodem /path/to/conf.bin 通常は screen でインタラクティブモードへ入り、Ctrl+A の押下後 :exec !! lrx -b -X /path/to/conf.bin を実行します
ダウンロードに成功すると、128バイトのファイルを生成します(xmodem の実装によっては、小さいサイズになることもあります)。
3. カスタムバイナリの作成 ダウンロードしたファイルをファームウェアのバイナリファイルの末尾へ連結し、カスタムバイナリを作成します。
連結には、コマンドラインツールや汎用のファイル連結ツールを使用してください。
実行例 ダウンロードした xmodem のファイルを conf.bin、元のバイナリファイルをApp_Uart_BLUE_L1305_V1-4-X.bin、作成するカスタムバイナリをApp_Uart_custom_V1-4-X.binとした場合の例を示します。
【Windows】
copy App_Uart_BLUE_L1305_V1-4 -X.bin App_Uart_custom_V1-4 -X.bin
type conf.bin >> App_Uart_custom_V1-4 -X.bin 【macOS / Linux】
cat App_Uart_BLUE_L1305_V1-4-X.bin conf.bin > App_Uart_custom_V1-4-X.bin 4. カスタムバイナリの書き込み 連結したカスタムバイナリを TWELITE へ書き込みます。
カスタムバイナリを書き込んでからインタラクティブモードへ入ると、最初の行の末尾に C- を表示します。
--- CONFIG/TWE UART APP V1-04-2/SID=0x81001f1c/LID=0x78 C- --- カスタムバイナリに対してインタラクティブモードから設定を上書きして保存すると、C-の代わりにCEと表示します。
--- CONFIG/TWE UART APP V1-04-2/SID=0x81001f1c/LID=0x78 CE --- 1.3.5.2.4 - シリアル通信アプリの通信における注意点 安定した通信を実現するための注意点
安定した通信を実現するための注意点を記載しています。
UART のデータ入出力 UART の入力には、入力側に 4KB、出力側に 4KB のバッファを確保しています。2系統のUARTを出力する場合は、各系統の入力に 2KB、出力に 2KB を利用します。
書式モードやチャットモードでバッファのサイズを意識する場面は多くありませんが、ヘッダ付き透過モードや透過モードで連続的に系列を入力する場合や、書式モードであっても多数の系列を一度に入力する場合は、バッファサイズの上限を意識する必要があります。出力においても、遅いボーレートを設定した場合には、無線で受信したデータの出力が間に合わない可能性があります。
バッファの上限を超えた場合は、その境界でのデータは保護されません。データ抜けが発生します。特に入力側では後述のフロー制御ピンを参照することを検討してください。
UART のフロー制御 入力側のフロー制御については、 RTS ピン同様の振る舞いをするように実装しています。使用するピンは PWM1(DIO5) であり、その対象は主UARTポートです。入力を受け付けないときに High、入力を受け付けるときに Low 状態となります。なお出力側のフロー制御には対応していません。受信側のデバイスでは、十分なボーレートと処理速度を確保してください。
電源投入・リセット直後は High です。UART が初期化されると Low。 UART の入力バッファが 7/8 を超えたときに High となります。下回ると Low。 透過モードでは、パケット送信中は High となります。 無線通信エラーの対策 受信側にデータ抜けが発生する場合は、無線の再送回数を増やしてください。
追加送信するパケットの数を増やすことで、受信の成功率を向上できる場合があります。
再送回数はインタラクティブモード で設定できます(x: set RF Conf)。
1.3.5.2.5 - インタラクティブモード(シリアル通信アプリ) インタラクティブモードによる設定変更
インタラクティブモードでアプリの詳細設定を行うことができます。
ここではシリアル通信アプリ(App_Uart)に固有の機能を説明します。共通機能については、TWELITE APPS マニュアル のトップページ を参照してください。
TWELITE がスリープしている間はインタラクティブモードを使用できません。
M3ピンGNDへ接続していないことを確認してください。
表示例 次のような画面を表示します。
--- CONFIG/TWE UART APP V1-04-5/SID=0x82018ca0/LID=0x78 -- ---
a: set Application ID (0x67720103)
i: set Device ID (120=0x78)
c: set Channels (18)
x: set RF Conf (3)
r: set Role (0x0)
l: set Layer (0x1)
b: set UART baud (38400)
B: set UART option (8N1)
m: set UART mode (E)
k: set Tx Trigger (sep=0x0d0a, min_bytes=0 dly=0[ms])
h: set header format [;U;%t;%i;0x%A;%q;%s;<*>;%X;\n]
C: set crypt mode (0)
o: set option bits (0x00000100)
---
S: save Configuration
R: reset to Defaults コマンド 各コマンドの詳細を次に示します。
a:アプリケーションID通信を行う端末はすべて同一の値とします。論理的にネットワークを分離します。
i:論理デバイスID複数の子機を識別する必要がある場合に設定します。
識別の必要がない、できない場合は120としてください。識別の必要がある場合は、子機は1-100の任意の値に、親機は0あるいは121としてください。
c:周波数チャネル通信を行う端末はすべて同一の値とします。物理的にネットワークを分離します。
x:送信出力と再送回数電波の送信出力と、透過モードおよびヘッダ付き透過モードにおいてパケットを追加で送信する回数を指定します。
r:役割子機のみ有効です。以下の値を指定します。通常はネットワーク層を利用しない配送方式を選択してください。
ネットワーク層を利用しない配送方式 0:通常の指定(親機または子機)1-3:中継子機(論理デバイスIDを1-100 または 120とします)1-3の数値は最大中継段数を指します。最大中継段数まで再送を繰り返す方式のため、中継機の配置や数によっては重複したパケットを中継します。ネットワーク層を利用する配送方式 書式モードのみ対応しています。
サイレントモードを有効化するには、上記の数値に80を足してください。例えば 93 は「ネットワーク層利用かつサイレントモード」です。
l:中継レイヤ中継レイヤの番号です。中継機は中継レイヤ数の上位(より小さい値)の中継機・親機への接続を試みます。役割 を12としているときにだけ有効です。
m:通信モードA:書式モード(アスキー)B:書式モード(バイナリ)C:チャットモードD:透過モードE:ヘッダ付き透過モードb:UART代替ボーレートBPSピンをGNDへ接続して起動した場合に選択される代替ボーレートを38400bpsから上書きします。
値は9600/19200/38400/57600/115200/230400から選択できます。他の値を指定すると、誤差が生じる可能性があります。
BPSピンを開放して起動した場合、この設定は適用されません。115200bpsに固定されます。
BPSピンの状態を無視して強制的に代替ボーレート設定を適用するには、オプションビットの強制的に代替ボーレートを適用 を有効とします。
B:UARTオプションBit-Parity-Stop の順で3文字を指定します。
k:送信トリガ透過モードとヘッダ付き透過モードの入力へ適用する送信トリガを設定します。
カンマ,で区切り、以下の順で入力してください。
送信トリガ文字 最小データサイズ タイムアウト 送信トリガ文字 この文字が入力されたときにパケットを送信します(最小データサイズを満たしていない場合を除く)。
インタラクティブモードでは、16進数のASCIIコードを指定します。先頭の0xは無視されます。初期状態ではCRLFとしています。
送信されるデータには送信トリガ文字も含まれます。送信トリガ文字を有効とするには、オプションビット 0x00000100 を指定する必要があります(デフォルト指定済み)。
最小データサイズ 連続して扱うデータの最小サイズを指定します。最小データサイズを満たすまでのデータに送信トリガ文字が含まれていても、これは無効となります。
インタラクティブモードでは、バイト数として1-80の数値を指定します。0で無効となります。初期状態では無効です。
タイムアウト 最後の入力からパケットを送信するまでの待ち時間を示します。
インタラクティブモードでは、ミリ秒単位で10-200の数値を指定します。0で無効となります。初期状態では無効
すべての設定を有効とした場合の優先順位は次の通りです。
タイムアウト 最小データサイズ 送信トリガ文字 タイムアウトが設定されていれば、常に優先します。送信トリガ文字が設定されていても、最小データサイズに達するまでは送信されません。
h:ヘッダ/ハンドル名ヘッダ付き透過モードに対してはヘッダのフォーマットを、チャットモードに対してはハンドル名を示します。
ヘッダ(ヘッダ付き透過モード) ヘッダ付き透過モードに対しては、ヘッダのフォーマット書式 を指定します。
ハンドル名(チャットモード) 相手端末に表示するハンドル名を指定します。
最大23文字です。送信するデータ(80バイト)の領域を消費します。
C:暗号化暗号化機能の有無を指定します。
AES128bitの暗号化を有効とするには、1を指定してください。
暗号化機能を有効とした端末は平文のメッセージも受信できますが、Ack 応答は利用できません。
o:オプションビット32bit の数値を指定します。各ビットに紐付いた設定を有効化できます。
オプションビットの詳細 オプションビットの値の各ビットに紐付いた設定を解説します。
00000001:M3の内部プルアップを停止TWELITE DIP におけるスリープ設定用のピン M3 の内部プルアップを停止します。
プルアップ停止時には、オープン状態で起動しないでください。意図せずスリープしてしまう場合があります。
00000100:送信トリガの有効化透過モードまたはヘッダ付き透過モードにおいて、送信トリガの設定 を有効とします。
00000200:新たな入力系列を優先書式モード(アスキー・バイナリ)、透過モード、ヘッダ付き透過モードにおいて、送信完了前に複数の系列が入力された際、新しいものを優先します。
制御値や計測値を連続的に送信し、常に最新のデータを反映させたい場合に有効です。
00001000:応答メッセージを停止書式モード(アスキー・バイナリ)、ヘッダ付き透過モードにおいて、送信完了時の応答メッセージを停止します。
00004000:重複チェッカの緩和受信側において、重複チェッカの条件を緩和します。
重複チェッカは、中継などにより重複して届いてしまったパケットを排除するための仕組みです。
100ms以下など短い間隔で送信を行うと、異なるパケットであっても同一のものであると見なされてしまう場合があります(続き番号が異なる場合も含む)。
送信間隔を短く設定する場合や、たくさんの送信機を同時に使用する際は、この設定を有効としてください。
00010000:強制的に代替ボーレートを適用起動時にBPSピンの入力が Low でなくとも、代替ボーレートの設定 を適用します。
インタラクティブモードも UART を使用するため、インタラクティブモードを使用するにはPC側のボーレートを合わせる必要があります。
00020000:副ポートへ同時出力シリアル出力TXの内容をシリアル副出力TX_SUBにも適用します。
入出力用のバッファ(入力4KB,出力4KB)は、主ポート・副ポートで半々(入力2KB,出力2KB)の割り当てとなります。
00040000:主ポートの切り替えシリアル入出力TX/RXとシリアル副入出力TX_SUB/RX_SUBを入れ替えます。
00100000:中継レイヤを制限書式モード(アスキー・バイナリ)において、ネットワーク層を利用する配送方式 を指定した場合に、必ず1階層上位に位置する中継機や親機へ送信させます。通常、ネットワーク層を利用する配送方式では、上位層で最も電波通信品質の高い中継機や親機へ送信します。
中継機能について 通信距離が足りない場合や、障害物があって通信できない場合には、中継機を使用することが有用です。
中継機能を持った端末は、自身が受信したパケットを他の端末へ送信します。
中継機能の設定 通常は、インタラクティブモードへ入った状態で役割 の値を1-3へ変更します。初期値は0で、中継機能を持ちません。
1-3の数値は最大中継段数を指します。例えば3を指定すると最大3段まで中継されます。
親機子機の区別をする場合、子機のみ有効です。
中継段数や中継機を増やすと、送信されるパケットも増加します。同一の周波数チャネル内の通信が不安定となってしまう場合があります。
設定例 次のネットワーク構成は、赤色の端末の役割 を0、青色の端末の役割 を3とした場合を示します。
役割の設定による中継の例
赤色の端末を追加すると、赤色の端末同士で最大3段の中継を伴う通信を実現できます。
送信機や受信機を追加する例
1.3.6 - キューアプリ マニュアル モノの動きを無線でお知らせ。
キューアプリ(App_CUE)は磁気・加速度センサータグ TWELITE CUE専用のアプリです。
1.3.6.1 - キューアプリ マニュアル 最新版
機能 モノに装着することで動きや状態を無線で送信できます。
複数の無線タグからのデータを親機で収集可能 複数の無線タグを親機で制御可能 16チャネルで複数システムを個別に運用可能 グループ毎に異なるアプリケーションIDを設定することで、同一チャネルに複数システムを混在可能 暗号化と暗号化鍵の設定 1.3.6.1.1 - キューアプリの動作モード キューアプリの動作モード
1.3.6.1.1.1 - キューアプリのTWELITE CUEモード 衝撃の検知やドアの開閉、加速度の計測のすべてを行うことができるオールインワンモード
加速度の計測、衝撃の検知、姿勢の検知、磁石の検知といった機能をすべて利用できるオールインワンモードです。
工場出荷時は本モードに設定されております。
設定 本モードを使用する場合は以下の項目を設定してください。
設定コマンド 設定項目 設定値 備考 p センサ固有パラメータの設定 00000000
親機の出力 代表的な電池寿命 5秒に1度の定期送信のみの場合、約80日 5秒に1度の定期送信 + 1分に1度TWELITE CUEを動かした場合、約80日 1分に1度の定期送信のみの場合、約700日 1分に1度の定期送信 + 1分に1度TWELITE CUEを動かした場合、約565日
消費電流は試験用のサンプル個体の実測に基づき、CR2032の容量を220mAhとして計算しています。電池寿命は参考値であり、保証値ではありません。電池の性能や使用温度等の使用環境で変化します。
1.3.6.1.1.2 - キューアプリの動作センサーパルモード 動作センサーパルとして動作するモード
動作センサーパルと同等の機能を使用できるモードです。
連続で加速度を計測する際や衝撃の検知を行う際は本モードを使用します。
本モードは次の3つのモードに分けられます。
加速度計測モード 加速度を間欠もしくは連続で計測し、送信するモードです。
設定 TWELITE2525Aモードフラグ TWELITE 2525Aモードフラグを1(センサ固有パラメータを13000000)に設定すると、TWELITE 2525A のFIFO(通常)モード として動作します。TWELITE 2525Aの代替として使用したい場合にはこのモードをご使用ください。
加速度センサープロパティ 加速度センサープロパティで連続送信サンプル数やサンプリング周波数を変更できます。
これらの設定は足し合わせることで機能を組み合わせて使用できます。
設定値(16進) 説明 0x?3????00~0x?3????FF 間欠送信モード時に送信するサンプル数を設定できます。 0x?3???0??~0x?3???F?? 加速度のサンプリング周波数を変更できます。設定値毎のサンプリング周波数は下記の通りです。
サンプル数を32以上に設定した場合、データは16サンプルごとに別のパケットへ分割されます。
例えば、サンプル数を32とした場合には、16サンプルのパケットが2回届きます 。32サンプルのパケットが1回届くのではないことに注意してください。
親機の出力 ムーブモード 動き出し(Move)やシェイク(Shake)を検出することができます。
通知パルのLEDを制御することができます。
設定 設定コマンド 設定項目 設定値 備考 p センサ固有パラメータの設定 01100000
親機の出力 使用上の注意 本モードは動きを検知してしてデータを送信します。
また、センサー固有パラメータ(p)を01000000にすると、動作検知の感度が厳しくなります。
ダイスモード TWELITE CUEが上に向いている面を検出することができます。
イベント検出モードと同様に通知パルのLEDを制御することができます。
設定 設定コマンド 設定項目 設定値 備考 p センサ固有パラメータの設定 02100000
親機の出力 使用上の注意 本モードは動きを検知して面の判定を行います。
また、センサー固有パラメータ(p)を02000000にすると、動作検知の感度が厳しくなります。
代表的な電池寿命 加速度計測モード(間欠送信)で1分に1度送信した場合、約3.5年 加速度計測モード(連続送信)でサンプリング周波数が25Hzの場合、約20日 イベント検出モードもしくはダイスモードで1分に1度、TWELITE CUEを動かした場合、約3年
消費電流は試験用のサンプル個体の実測に基づき、CR2032の容量を220mAhとして計算しています。電池寿命は参考値であり、保証値ではありません。電池の性能や使用温度等の使用環境で変化します。
1.3.6.1.1.3 - キューアプリの開閉センサーパルモード 開閉センサーパルとして動作するモード
モノに装着し、磁石の有無によってその開閉を知ることができるモードです。
ドアの開閉や工場設備の稼働状況を計測する場合は本モードを使用します。
設定 本モードを使用する場合は以下の項目を設定してください。
設定コマンド 設定項目 設定値 備考 p センサ固有パラメータの設定 04000000
親機の出力 代表的な電池寿命 1日に200回の開閉を行なった場合、約4年です。(含1分毎の定期送信)
消費電流は試験用のサンプル個体の実測に基づき、CR2032の容量を220mAhとして計算しています。電池寿命は参考値であり、保証値ではありません。電池の性能や使用温度等の使用環境で変化します。
1.3.6.1.2 - キューアプリの設定方法 キューアプリの設定方法
TWELITE CUEを設定する方法には、有線と無線の2種類があります。
1.3.6.1.2.1 - キューアプリのOTAによる設定 無線による設定の方法
OTA設定は、インタラクティブモードの設定を無線経由で行う機能です。
OTAによる設定手順 以下の手順でOTAによる設定を行います。
1. TWELITE STAGE APPを起動する パソコンへTWELITE STAGE SDK をインストール し、MWSTAGEフォルダ内のTWELITE_Stageを起動する。
2. MONOSTICKへOTA設定用のアプリを書き込む 2: アプリ書換 > 1: BINから選択 を開き、App_CUE_OTA_... を選択する。
3. インタラクティブモードで設定値を入力する 3: インタラクティブモード を選択し、値を編集・保存する。
4. OTA設定を実行する MONOSTICKから約20cm以内の距離に TWELITE CUE を置く。本体の電源を投入するか、または磁石を磁気センサーへ5回以上接近させて、TWELITE CUE の LED が点滅することを確認する。
5. MONOSTICKの出力を確認する 次のようなメッセージの出力を確認する。
出力されない場合はこちら
6. MONOSTICKのアプリを書き戻す 2: アプリ書換 > 1: BINから選択 を開き、App_Wings_MONOSTICK_... を選択する。
OTAに失敗した場合 距離が遠い 次のようなメッセージは、距離が遠いことを示します。
OTA FAILURE
OTA request TS=20515[ms]
LQI:63 (RF strength, >= 100)
SID:810BA765
TWELITE CUE:v1.1.1
Protocol Version:0x11
--— LQI is small. Please make TWELITE CUE closer. —-- この場合は、MONOSTICK と TWELITE CUE の距離を近づけてください。
対象が異なる 次のようなメッセージは、TWELITE CUE のファームウェアが異なっているか、間違って TWELITE CUE を近づけていることを示します。
OTA FAILURE
OTA request TS=20515[ms]
LQI:180 (RF strength, >= 100)
SID:810BA765
TWELITE CUE:v1.1.1
Protocol Version:0x13
--— Different protocol version. Please update TWELITE CUE. —-- この場合は、間違って TWELITE CUE を近づけていないか確認してください。
また、TWELITE CUE のファームウェアを書き換えていた場合は、TWELITE R2/R3を使って App_CUE へ書き戻してください。
1.3.6.1.2.2 - キューアプリのTWELITE R2/R3による設定 TWELITE R2/R3を使う設定の方法
TWELITE CUEの7PインターフェイスへTWELITE R2/R3 を接続することで設定できます。
TWELITE R2との接続例
TWELITE R2/R3を逆向きに接続するとTWELITE CUEが破損します。
TWELITE R2/R3を使用して設定する場合は以下の手順で設定してください。
1. TWELITE STAGE APPを起動する パソコンへTWELITE STAGE SDK をインストール し、MWSTAGEフォルダ内のTWELITE_Stageを起動する。
2. インタラクティブモードで設定値を入力する 3: インタラクティブモード を選択し、値を編集・保存する。
1.3.6.1.2.3 - インタラクティブモード(キューアプリ) インタラクティブモードによる詳細な設定変更
本アプリでは、インタラクティブモードからアプリの詳細設定を行うことができます。
ここではキューアプリ(App_CUE)に固有の機能を説明します。共通機能については、TWELITE APPS マニュアル のトップページ を参照してください。
インタラクティブモードに入ると以下の画面が表示されます。
--- CONFIG/App_CUE V1-00-2/SID=0x810ba765/LID=0x01 ---
a: set Application ID (0x67720102)
i: set Device ID (--)
c: set Channels (18)
x: set Tx Power (13)
b: set UART baud (38400)
B: set UART option (8N1)
k: set Enc Key (0xA5A5A5A5)
o: set Option Bits (0x00000001)
t: set Transmission Interval (5)
p: set Senser Parameter (0x00000000)
---
S: save Configuration
R: reset to Defaults
設定コマンド一覧 コマンド 設定項目 初期値 説明 a アプリケーションID 0x67720102 同一の周波数チャネルを複数のグループで使用することが可能です。値は32ビットで設定します。 i 論理デバイスID – 子機の論理デバイスIDを設定します。1~100までの値を設定できます。 c 周波数チャネルの設定 18 チャネル(11~26)を選択します。省電力動作を優先する観点から、複数チャネルの指定は無効としています。 x 送信出力の設定 13 1桁、または2桁の数字を指定します。2桁目は省略可能です。 1桁目は、送信出力を設定します。3が最強で2,1,0と1段階小さくなるたびに -11.5db 出力が低下します。出力を制限し電波の有効伝達範囲を小さくしたい場合に使用します。ただし、伝達可能距離は環境(ノイズ・遮蔽物など)に影響を受けます。 b UARTボーレートの設定 38400 入力値にかかわらず115200bps固定です。 B UARTパリティの設定 8N1 入力値にかかわらず8N1で固定です。 k 暗号化鍵の設定 0xA5A5A5A5 暗号化鍵を入力します。32bitの16進数を設定します。通信グループ内は全て同一の値に設定してください。 o オプションビットの設定 0x00000001 各種詳細設定ができます。 t 送信間隔の設定 5 定期送信パケットの送信間隔を秒単位で設定します。1〜4095の値で指定可能です。範囲外の設定をした場合の動作は不定です。 p センサ固有パラメータの設定 0 モードの切り替えやパラメータの設定をします。0以上の16進数で指定できます。詳細は、各種モード のページを参照ください。 S 設定値の保存 設定を保存し、モジュールを再起動します。 R 初期値に設定を戻す 設定を初期化します。他の操作を行わず、続けてS キーによる設定の保存を行うとセーブ領域のクリアを行います。
オプションビットの設定 オプションビット設定値を各ビットごとに解説します。
ビット(16進) 説明 0x00000001 各中継機または親機宛に送信し、受信した中継機すべての情報が親機に転送され、シリアル出力されます。 0x00000040 OTAを無効にする。 0x00001000 暗号化通信を有効にします。(相手側の暗号化設定もしてください。) 0x00010000 UART通信でのメッセージ出力を有効にします。
1.3.7 - アリアアプリ マニュアル 温度・湿度を無線でお知らせ。
アリアアプリ(App_ARIA)は磁気・湿度・温度センサータグ TWELITE ARIA専用のアプリです。
1.3.7.1 - アリアアプリ マニュアル 最新版
1.3.7.1.1 - アリアアプリの使用方法 アリアアプリの使用方法
アリアアプリの使用方法を2つのステップに分けて説明します。
1.3.7.1.1.1 - アリアアプリの動作確認 MONOSTICKとPCを使用して、TWELITE ARIAの動作確認を行う
TWELITE CUEとMONOSTICKを使用して温度を計測してみましょう。
必要なもの TWELITE CUE MONOSTICK 電池を入れる CR2032電池の+側を電池ホルダー(+)の向きで差し込みます。TWELITE CUEのLEDが3回点滅すれば正常です。
電池の装着
電池の向きに注意してください。逆に入れた場合、発熱し故障の原因になります。
また、TWELITE ARIAの電池ホルダーは構造上、半田付け部が外れやすいため、以下に注意して電池を挿入してください。
コイン電池の取り外し時には電池ホルダーの半田付け部に力がかかりにくくなるように、電池ホルダーを上から軽く指で押さえながらコイン電池を取り外すことを推奨します。 TWELITE ARIAの運用時は、専用ケースで電池ホルダーを上から押さえながら使用することを推奨します。 固定用磁石を取り付ける 図の位置の窪みに磁石を取り付けると、TWELITE ARIAを金属面に貼り付けることができます。必要に応じてお使いください。
磁石の設置箇所
ケースに入れる 丸印で示したようにケースの縁にある爪に引っ掛けて収めてください。
基板の挿入
必要に応じてねじ止めをしてください。ねじ穴はストラップを通したり、対象物への固定用にも使用できます。
ケースを開ける ケースの切り込みにコインを差し込みこじ開けてください。
コインを差し込む場所
親機・中継機の準備 通信相手として親機が必要です。通信距離を延長する場合は中継機 が使用できます。親機、中継機にはMONOSTCK - モノスティック を使用することができます。
MONOSTCK - モノスティックのアプリは親機・中継機アプリ Wings-ウイングス のバージョンv1-01-4以上を書き込んでください。
動作確認をする TWELITE ARIAを動かしたり、磁石を近づけたりして、パソコンに接続したMONOSTICKで受信したデータを確認してみましょう。
TWELITE STAGE SDKの準備 まず最初にTWELITE STAGE SDK の最新版をパソコンにインストールします。
TWELITE STAGE APPを起動する MONOSTICKをパソコンのUSBポートに接続します。 インストールしたTWELITE STAGE SDKのMWSTAGEフォルダ内の以下のファイルをダブルクリックしてください。 シリアルポート選択画面から1: MONOSTICKを選択してください。 デバイスを選択するとTWELITE STAGE APPのトップメニュー画面が表示されます。 親機の準備 通信相手として親機が必要です。親機にはMONOSTCK - モノスティック を使用することができます。親機・中継機アプリ Wings-ウイングス をMONOSTICK - モノスティックに書き込んでください。
トップメニューから 2:アプリの書換 > 1:BINから選択を選択してください。 MONOSTICK BLUE を使用している場合はApp_Wings_MONOSTICK_BLUE_… を選択し、MONOSTICK RED を使用している場合はApp_Wings_MONOSTICK_RED_… を選択してください。 書き込み完了後はインタラクティブモードに入らずにESCキーを長押ししてトップメニューに戻ってください。 ビューアを選択する トップメニューから 1:ビューア > 4: CUE/ARIAビューア を選択します。 TWELITE ARIA タブをクリックします。 TWELITE ARIAビューア
TWELITE ARIAの動作確認をする 温度、湿度を計測する 5秒ごとに温湿度の値が更新されます。
磁石を検出させる 磁石のN極を磁気センサーに近づけると「[N極]」と表示されます。 磁石のS極を磁気センサーに近づけると「[S極]」と表示されます。 磁石を磁気センサーから遠ざけると「 —- 」と表示されます。 モードを変更する モードを変更することで、TWELITE ARIAの振る舞いを変更することができます。
詳しくは以下のページをご確認ください。
モード選択
設定を変更する グループ分けや送信頻度の変更などはインタラクティブモードで設定できます。
インタラクティブモードへの移行方法は以下のページをご確認ください。
設定方法
また、設定できる項目については以下のページをご確認ください。
インタラクティブモード
ログを出力する パルスクリプトで温湿度などのデータをCSV形式でログに出力することができます。
詳しくは以下のページをご確認ください。
パルスクリプト
グラフを描画する パルビューアで温湿度や磁気センサーの値をグラフで見ることができます。
詳しくは以下のページをご確認ください。
パルビューア
1.3.7.1.1.2 - アリアアプリの動作モード アリアアプリの動作モード
アリアアプリには、TWELITE ARIAモードと開閉センサーパルモードの2種類の動作モードがあります。
TWELITE ARIAモード TWELITE ARIAの初期モードです。
温湿度計測とドアの開閉の検知を同時に行うことができるオールインワンモードです。
開閉センサーパルモード 開閉センサーパルとして動作するモードです。
ドアの開閉や工場設備の稼働状況を計測する場合は本モードを使用します。
1.3.7.1.1.2.1 - アリアアプリのTWELITE ARIAモード 初期設定のモード
温湿度の計測、磁石の有無のすべてを試すことができるオールインワンモードです。
工場出荷時は本モードに設定されております。
設定 本モードを使用する場合は以下の項目を設定してください。
設定コマンド 設定項目 設定値 備考 p センサ固有パラメータの設定 00000000
親機の出力 代表的な電池寿命 5秒に1度の定期送信のみの場合、約340日 5秒に1度の定期送信 + 1分に1度磁石を近づけた場合、約300日 1分に1度の定期送信のみの場合、約4年 1分に1度の定期送信 + 1分に1度磁石を近づけた場合、約2.5年
消費電流は試験用のサンプル個体の実測に基づき、CR2032の容量を220mAhとして計算しています。電池寿命は参考値であり、保証値ではありません。電池の性能や使用温度等の使用環境で変化します。
1.3.7.1.1.2.2 - アリアアプリの開閉センサーパルモード 開閉センサーパルとして動作するモード
モノに装着し、磁石の有無で開閉を知ることができるモードです。
設定 本モードを使用する場合は以下の項目を設定してください。
設定コマンド 設定項目 設定値 備考 p センサ固有パラメータの設定 04000000
親機の出力 代表的な電池寿命 1日に200回の開閉を行なった場合、約4年です。(含1分毎の定期送信)
消費電流は試験用のサンプル個体の実測に基づき、CR2032の容量を220mAhとして計算しています。電池寿命は参考値であり、保証値ではありません。電池の性能や使用温度等の使用環境で変化します。
1.3.7.1.2 - アリアアプリの設定方法 アリアアプリの設定方法
アリアアプリを設定する方法は以下の2種類あります。
設定できる内容に関してはインタラクティブモードをご確認ください。
OTAによる設定 OTAとはOver the Airの略です。非接触での通信を意味します。OTA設定はインタラクティブモード の設定をケーブル接続不要で行う機能です。
OTAを実行するには MONOSTICK-モノスティック が必要です。
TWELITE R2を使用する設定 TWELITE CUEの7PインターフェイスにTWELITE R2/R3 を接続し、インタラクティブモードで設定を行うことも可能です。
1.3.7.1.2.1 - アリアアプリのOTAによる設定 TWELITE ARIAとMONOSTICKとの無線通信による設定
OTA設定は、インタラクティブモードの設定を無線経由で行う機能です。
OTAによる設定手順 以下の手順でOTAによる設定を行います。
1. TWELITE STAGE APPを起動する パソコンにTWELITE STAGE SDK をインストール し、MWSTAGEフォルダ内のTWELITE_Stageを起動する。
2. MONOSTICKにOTA設定用のアプリを書き込む 2: アプリ書換 > 1: BINから選択 を開き、App_ARIA_OTA_... を選択する。
3. インタラクティブモードで設定値を入力する 3: インタラクティブモード を選択し、値を編集・保存する。
4. OTA設定を実行する MONOSTICKから約20cm以内の距離に TWELITE ARIA を置く。本体の電源を投入するか、または磁石を磁気センサーへ5回以上接近させて、TWELITE ARIA の LED が点滅することを確認する。
5. MONOSTICKの出力を確認する 次のようなメッセージの出力を確認する。
出力されない場合はこちら
6. MONOSTICKのアプリを書き戻す 2: アプリ書換 > 1: BINから選択 を開き、App_Wings_MONOSTICK_... を選択する。
OTAに失敗した場合 距離が遠い 次のようなメッセージは、距離が遠いことを示します。
OTA FAILURE
OTA request TS=20515[ms]
LQI:63 (RF strength, >= 100)
SID:810BA765
TWELITE ARIA:v1.1.1
Protocol Version:0x13
--— LQI is small. Please make TWELITE ARIA closer. —-- この場合は、MONOSTICK と TWELITE ARIA の距離を近づけてください。
対象が異なる 次のようなメッセージは、TWELITE ARIA のファームウェアが異なっているか、間違って TWELITE CUE を近づけていることを示します。
OTA FAILURE
OTA request TS=20515[ms]
LQI:180 (RF strength, >= 100)
SID:810BA765
TWELITE ARIA:v1.1.1
Protocol Version:0x11
--— Different protocol version. Please update TWELITE ARIA. —-- この場合は、間違って TWELITE CUE を近づけていないか確認してください。
また、TWELITE ARIA のファームウェアを書き換えていた場合は、TWELITE R2/R3を使って App_ARIA へ書き戻してください。
1.3.7.1.2.2 - アリアアプリのTWELITE R2/R3による設定 TWELITE ARIAとTWELITE R2/R3を有線で接続して行う設定
TWELITE ARIAの7PインターフェイスへTWELITE R2/R3 を接続することで設定できます。
TWELITE R2との接続例
TWELITE R2/R3を逆向きに接続するとTWELITE ARIAが破損します。
TWELITE R2/R3を使用して設定する場合は以下の手順で設定してください。
1. TWELITE STAGE APPを起動する パソコンへTWELITE STAGE SDK をインストール し、MWSTAGEフォルダ内のTWELITE_Stageを起動する。
2. インタラクティブモードで設定値を入力する 3: インタラクティブモード を選択し、値を編集・保存する。
1.3.7.1.3 - インタラクティブモード(アリアアプリ) アリアアプリのインタラクティブモード
インタラクティブモードでアプリの詳細設定を行うことができます。
ここではアリアアプリ(App_ARIA)に固有の機能を説明します。共通機能については、TWELITE APPS マニュアル のトップページ を参照してください。
TWELITE がスリープしている間はインタラクティブモードを使用できません。
SETピンをGNDへ接続した状態で起動してください。TWELITE STAGE アプリと TWELITE R2/R3 は、自動的にこの操作を行います。
表示例 次のような画面を表示します。
--- CONFIG/App_ARIA V1-01-0/SID=0x810a7817/LID=0x01 ---
a: set Application ID (0x67720102)
i: set Device ID (--)
c: set Channels (18)
x: set Tx Power (13)
b: set UART baud (38400)
B: set UART option (8N1)
k: set Enc Key (0xA5A5A5A5)
o: set Option Bits (0x00000001)
t: set Transmission Interval (5)
p: set Senser Parameter (0x00000000)
d: set Temperature Coefficient (0)
D: set Temperature Offset (0)
f: set Humidity Coefficient (0)
F: set Humidity Offset (0)
---
S: save Configuration
R: reset to Defaults
コマンド 各コマンドの詳細を次に示します。
a:アプリケーションID通信を行う端末はすべて同一の値とします。論理的にネットワークを分離します。
i:論理デバイスID複数の子機を識別する必要がある場合に設定します。
1-100の任意の値を設定できます。
c:周波数チャネル通信を行う端末はすべて同一の値とします。物理的にネットワークを分離します。
x:送信出力と再送回数電波の送信出力と、透過モードおよびヘッダ付き透過モードにおいてパケットを追加で送信する回数を指定します。
b:UART代替ボーレート適用できません。TWELITE DIP 等の製品とは異なり BPS ピンがないからです。
B:UARTオプション適用できません。TWELITE DIP 等の製品とは異なり BPS ピンがないからです。
k:暗号鍵オプションビットの暗号化通信の有効化 を設定した場合の暗号化鍵を32bitの16進数で指定します。
o:オプションビット32bit の数値を指定します。各ビットに紐付いた設定を有効化できます。
t:送信間隔データの送信間隔を指定します。
p:センサ固有パラメータ動作モード の切り替えに使用します。
d:温度係数0-60000の範囲で温度データの係数\(d\)を指定します。
0の場合は無効です。それ以外の値では、最終的な温度を\(\frac{d}{1024}\)倍とします。
D:温度オフセット-2000-2000の範囲で温度データのオフセット\(D\)を指定します。
100倍された温度に\(D\)を加算します。最終的な温度は \(\frac{D}{100}\)°C 変化します。
f:湿度係数0-60000の範囲で湿度データの係数\(f\)を指定します。
0の場合は無効です。それ以外の値では、最終的な湿度を\(\frac{f}{1024}\)倍とします。
F:湿度オフセット-2000-2000の範囲で湿度データのオフセット\(F\)を指定します。
100倍された湿度に\(F\)を加算します。最終的な湿度は \(\frac{F}{100}\)% 変化します。
オプションビットの詳細 オプションビットの値の各ビットに紐付く設定を解説します。
00000001:中継機への送信を有効化親機だけでなく、中継機へ向けた送信を有効化します。
このオプションを設定していない場合にも中継機を使用できますが、親機は重複して届いたパケットを排除します。このとき、パケットがどの中継機を通して伝わったのか、あるいは中継されていないのかを確かめる術はありません。
このオプションを設定していると、親機は複数の端末から受信した一つのパケットを別々に出力することができます。親機に接続されたデバイスが出力を分析することで、子機がどの端末の近くにあったのかを調べることができます。
00000040:OTA設定機能を無効化OTA設定の機能を無効化します。
00001000:暗号化通信の有効化暗号化通信を有効にします。相手側の暗号化通信も有効化する必要があります。
00010000:子機のUART出力を有効化子機のメッセージ出力を有効化します。
1.3.8 - パルアプリ マニュアル TWELITE PAL シリーズ用
パルアプリ(App_PAL)は、無線タグシステム TWELITE PAL シリーズ専用のアプリです。
工場出荷時の TWELITE BLUE / RED PAL へインストールしています。
1.3.8.1 - パルアプリ マニュアル 最新版
導入方法 パルアプリ(App_PAL)を書き込むには TWELITE STAGE SDK をインストールして、TWELITE STAGE アプリを使って書き換え てください。
App_PAL_EndDevice が子機用です。
以前は親機用として App_PAL_Parent を同梱していましたが、現在は App_Wings へ統合されています。
対応するハードウェア 開閉センサーパル を装着した TWELITE BLUE / RED PAL 環境センサーパル を装着した TWELITE BLUE / RED PAL 動作センサーパル を装着した TWELITE BLUE / RED PAL 通知パル を装着した TWELITE BLUE / RED PAL
子機の使用上限 1つの親機と通信できる子機の数は、親機へ届くパケットの数によって決まります。
例えば、1つの子機が連続で加速度を送信する場合は、1対1通信を推奨します。
子機が間欠動作をする場合には、すべての子機に対して 0.1*送信機の台数秒 以上の送信間隔を空けるように推奨しております。例えば、送信を行う子機が10台あるのなら、各子機の送信間隔は1秒以上空けてください。
1.3.8.1.1 - インタラクティブモード(パルアプリ) パルアプリのインタラクティブモード
インタラクティブモードでアプリの詳細設定を行うことができます。
ここではパルアプリ(App_PAL)に固有の機能を説明します。共通機能については、TWELITE APPS マニュアル のトップページ を参照してください。
TWELITE がスリープしている間はインタラクティブモードを使用できません。
SETピンをGNDへ接続した状態で起動してください。TWELITE STAGE アプリと TWELITE R2/R3 は、自動的にこの操作を行います。
表示例 次のような画面を表示します。
--- CONFIG/App_PAL V1-05-2/SID=0x810e0e23/LID=0x01 ---
a: set Application ID (0x67726305)
i: set Device ID (--)
c: set Channels (15)
x: set Tx Power (13)
b: set UART baud (38400)
B: set UART option (8N1)
k: set Enc Key (0xA5A5A5A5)
o: set Option Bits (0x00000001)
t: set Transmission Interval (60)
p: set Senser Parameter (0x00000000)
e: set Event Parameter(s) (0180002A0208002A0300802A0488002A0580802A0608802A0880000A1008000A)
d: set Temperature Coefficient (0)
D: set Temperature Offset (0)
f: set Humidity Coefficient (0)
F: set Humidity Offset (0)
---
S: save Configuration
R: reset to Defaults コマンド 各コマンドの詳細を次に示します。
a:アプリケーションID通信を行う端末はすべて同一の値とします。論理的にネットワークを分離します。
i:論理デバイスID複数の子機を識別する必要がある場合に設定します。
識別の必要がない、できない場合は120としてください。識別の必要がある場合は、子機は1-100の任意の値に、親機は0あるいは121としてください。
c:周波数チャネル通信を行う端末はすべて同一の値とします。物理的にネットワークを分離します。
x:送信出力と再送回数電波の送信出力と、透過モードおよびヘッダ付き透過モードにおいてパケットを追加で送信する回数を指定します。
b:UART代替ボーレートBPSピンをGNDへ接続して起動した場合に選択される代替ボーレートを38400bpsから上書きします。
値は9600/19200/38400/57600/115200/230400から選択できます。他の値を指定すると、誤差が生じる可能性があります。
BPSピンを開放して起動した場合、この設定は適用されません。115200bpsに固定されます。
B:UARTオプションBPSピンをGNDへ接続して起動した場合に選択される代替設定を8N1から上書きします。
パリティはN: 無し、O: Odd(奇数)、E: Even(偶数)を設定します。ハードウェアフローは設定できません。8N1, 7E2 などと設定できますが、8N1 以外の設定は未検証です。事前に動作をご確認ください。
BPSピンを開放して起動した場合、この設定は適用されません。115200bpsに固定されます。
k:暗号鍵オプションビットの暗号化通信の有効化 を設定した場合の暗号化鍵を32bitの16進数で指定します。
o:オプションビット32bit の数値を指定します。各ビットに紐付いた設定を有効化できます。
t:送信間隔データの送信間隔を指定します。通知パルの場合は、親機へ制御情報を問い合わせて、それをLEDの出力へ反映する間隔を示します。
p:センサ固有パラメータハードウェアによって異なります。
e:通知イベント通知パル イベント番号を受信した際の動作を指定します。
詳しくは通知イベントの詳細 をご覧ください。
d:温度係数環境センサーパル 0-60000の範囲で温度データの係数\(d\)を指定します。
0の場合は無効です。それ以外の値では、最終的な温度を\(\frac{d}{1024}\)倍とします。
D:温度オフセット環境センサーパル -2000-2000の範囲で温度データのオフセット\(D\)を指定します。
100倍された温度に\(D\)を加算します。最終的な温度は \(\frac{D}{100}\)°C 変化します。
f:湿度係数環境センサーパル 0-60000の範囲で湿度データの係数\(f\)を指定します。
0の場合は無効です。それ以外の値では、最終的な湿度を\(\frac{f}{1024}\)倍とします。
F:湿度オフセット環境センサーパル -2000-2000の範囲で湿度データのオフセット\(F\)を指定します。
100倍された湿度に\(F\)を加算します。最終的な湿度は \(\frac{F}{100}\)% 変化します。
オプションビットの詳細 オプションビットの値の各ビットに紐付く設定を解説します。
00000001:中継機への送信を有効化親機だけでなく、中継機へ向けた送信を有効化します。
このオプションを設定していない場合にも中継機を使用できますが、親機は重複して届いたパケットを排除します。このとき、パケットがどの中継機を通して伝わったのか、あるいは中継されていないのかを確かめる術はありません。
このオプションを設定していると、親機は複数の端末から受信した一つのパケットを別々に出力することができます。親機に接続されたデバイスが出力を分析することで、子機がどの端末の近くにあったのかを調べることができます。
00001000:暗号化通信の有効化暗号化通信を有効にします。相手側の暗号化通信も有効化する必要があります。
00010000:子機のUART出力を有効化子機のメッセージ出力を有効化します。
センサ固有パラメータの詳細 センサ固有パラメータの値に紐付く設定を解説します。
開閉センサーパル 使用しません。
環境センサーパル 使用しません。
動作センサーパル 32bitの数値を指定します。
bit 31-28 27-24 23-20 19-16 15-12 11-8 7-4 3-0 機能 - - - - ATHSFQSCT:7-4SCT:3-0初期値 00000000
各機能は次の内容を示します。
SCT:サンプル数SCTは送信するサンプル数に影響します。
間欠送信モード ATHを0かつt:送信間隔0以外とした場合は、間欠送信モードとなります。
SCTの値を\(C_i\)としたとき、サンプル数は\(16C_i+16\)と表すことができます。
pSCTサンプル数 0x??????000x0016サンプル(初期設定) 0x??????010x0132サンプル … 0x??????070x07128サンプル … 0x??????FF0xFF4096サンプル
アクティブ検出モード ATHとt:送信間隔0以外とした場合は、アクティブ検出モードとなります。
アクティブ検出モードでは、ATHによって与えられる加速度のしきい値を超えたとき、直前の30サンプルに加えて 直後のサンプルを送信します。
SCTの値を\(C_a\)としたとき、直後のサンプル数は\(30C_a+30\)と表すことができます。
pSCT直後のサンプル数 0x??????000x0030サンプル(初期設定) 0x??????010x0160サンプル … 0x??????070x07240サンプル … 0x??????FF0xFF7680サンプル
SFQ:サンプリング周波数SFQは加速度データのサンプリング周波数に影響します。
pSFQサンプリング周波数 0x?????0??0x025Hz(初期設定) 0x?????1??0x150Hz 0x?????2??0x2100Hz 0x?????3??0x3190Hz
ATH:アクティブ検出モードATHはアクティブ検出モードの振る舞いに影響します。
0の場合は無効となり、1-Fの場合はその値をしきい値として有効となります。
pATH内容 0x????0???0x0無効(初期設定) 0x????1???0x11G(非推奨) 0x????2???0x22G … 0x????F???0xF15G
ATHを1とした場合、定置していても常にアクティブ状態となってしまいます。
通知パル 32bitの数値を指定します。
00000000:タップ&シェイクモードタップ(軽く叩く)やシェイク(振る)をした時にデータを送信します。
00000001:サイコロモード6通りの上面を検出し、データを送信します。
通知イベントの詳細 値は最大68バイトのバイナリデータであり、16進数の文字列で表現します。
一つのイベントは4バイトで構成します。イベントの最大数は17です。
# データ 内容 備考 1番目のイベント 0 uint8イベントID 0x00-0x101 uint8赤と緑の輝度 赤0x0?-0xF?, 緑0x?0-0x?F 2 uint8青と白の輝度 青0x0?-0xF?, 白0x?0-0x?F 3 uint8点滅パターンと点灯時間 点滅パターン 常時点灯0x0?, 遅0x1?, 並0x2?, 早0x3? 点灯時間 消灯しない0x?0, 秒指定0x?1-0x?F 2番目のイベント 4 uint8イベントID 0x01-0x105 uint8赤と緑の輝度 赤0x0?-0xF?, 緑0x?0-0x?F 6 uint8青と白の輝度 青0x0?-0xF?, 白0x?0-0x?F 7 uint8点滅パターンと点灯時間 点滅パターン 常時点灯0x0?, 遅0x1?, 並0x2?, 早0x3? 点灯時間 消灯しない0x?0, 秒指定0x?1-0x?F 3番目のイベント <省略> 17番目のイベント 64 uint8イベントID 0x01-0x1065 uint8赤と緑の輝度 赤0x0?-0xF?, 緑0x?0-0x?F 66 uint8青と白の輝度 青0x0?-0xF?, 白0x?0-0x?F 67 uint8点滅パターンと点灯時間 点滅パターン 常時点灯0x0?, 遅0x1?, 並0x2?, 早0x3? 点灯時間 消灯しない0x?0, 秒指定0x?1-0x?F
設定データの例 初期設定の例を示します。
0180002A0208002A0300802A0488002A0580802A0608802A0880000A1008000A # データ 内容 値 1番目のイベント 010 uint8イベントID 0x01801 uint8赤と緑の輝度 赤8/15, 緑0/15 002 uint8青と白の輝度 青0/15, 白0/15 2A3 uint8点滅パターンと点灯時間 並, 10秒 2番目のイベント 024 uint8イベントID 0x02085 uint8赤と緑の輝度 赤0/15, 緑8/15 006 uint8青と白の輝度 青0/15, 白0/15 2A7 uint8点滅パターンと点灯時間 並, 10秒 3番目のイベント <省略> 8番目のイベント 1028 uint8イベントID 0x100829 uint8赤と緑の輝度 赤0/15, 緑8/15 0030 uint8青と白の輝度 青0/15, 白0/15 0A31 uint8点滅パターンと点灯時間 常時点灯, 10秒
1.4 - act サンプル act のサンプルプログラム
MWSDK/Act_Samplesディレクトリには、actのサンプルプログラムを格納しています。
1.4.1 - act サンプル 最新版
MWSDK/Act_Samplesディレクトリには、actのサンプルプログラムを格納しています。
サンプルの紹介 以下には、目的別のアクトを紹介します。
無線通信を行わなず、マイコン機能のみの短いアクト act0..4無線機能などを使わないごくシンプルな例です。actの基本構造が理解できます。
I2C センサーを用いたアクトの記述例 I2Cセンサーを接続し、スリープによる簡潔動作を行いながら無線パケットを送信する、無線センサーの実装例です。
比較的簡潔的かつ代表的な構造ですので、act0からact4を確認してから参照することを推奨します。
BRD_I2C_TEMPHUMIDTWELITE で無線センサーを実装するための代表的な要素(シンプル中継ネット <NWK_SIMPLE> の利用・インタラクティブモード <STG_STD>、I2Cセンサーの取り扱い Wire、スリープによる間欠動作など)が含まれます。
無線通信を行う基本的なアクト 無線パケットを送信、または送受信するサンプルですが、各々少し違った視点で実装されています。
ScratchUARTから1バイトコマンドを受けて、送信などを行うシンプルなコードです。
Slp_Wk_and_Txステートマシンを用い、スリープを用いた間欠動作で、スリープ復帰→無線送信→スリープを繰り返します。
PingPong一方から他方にパケットを送信し、受信した他方がパケットを送り返すサンプルです。送信と受信についての基本的な手続きが含まれます。
WirelessUARTUART入力をserparserを用いてアスキー形式を解釈してから、これを送信します。
親機側のアクト
注:このサンプルに含まれるアクトの無線パケットの受信には、
App_Wings を利用することもできます。
独自の受信側親機アプリケーションを実装するときに参照してください。
Parent-MONOSTICK専ら受信のみを行い、シリアルポートへ受信結果を出力します。このサンプルの無線パケットで、親機向け(0x00)や子機ブロードキャスト(0xFE)とアドレス設定しているものは受信できます。またインタラクティブモード<STG_STD>をactに追加するための手続きが含まれます。
Rcv_Univslユニバーサルパケットレシーバ (TWENETレイヤーツリーネットワーク, App_Twelite, act, … など) のサンプルコードです。また、コンテナやアルゴリズムにEASTLライブラリを使用しています。
インタラクティブモードを追加するためのアクト インタラクティブモードを使用するアクトの解説には大まかな流れを記しています(ここでは上述の BRD_I2C_TEMPHUMID を引用します)。どのサンプルの解説も大きな差はありません。
BRD_I2C_TEMPHUMIDI2Cセンサーデバイスの読み書きコマンドを実行し I2C センサーから得られた計測値を無線送信します。またインタラクティブモード<STG_STD>をactに追加するための手続きが含まれます。
Settingsインタラクティブモード<STG_STD>のより高度なカスタマイズを行います。詳細はコードを参照ください。
センサーなどのデバイスを動作させるためのアクト 内蔵ペリフェラルや外部センサーデバイスからセンサー情報を得るサンプルです。
BRD_APPTWELITEディジタル入力、アナログ入力、ディジタル出力、アナログ出力を用いた双方向通信を行っています。またインタラクティブモード<STG_STD>をactに追加するための手続きが含まれます。
BRD_I2C_TEMPHUMIDI2Cセンサーデバイスの読み書きコマンドを実行し I2C センサーから得られた計測値を無線送信します。またインタラクティブモード<STG_STD>をactに追加するための手続きが含まれます。
PulseCounterパルスカウンター機能を用い、スリープ中も含め入力ポートで検出したパルス数を計数し、これを無線送信します。
PAL_AMB_behaviorビヘイビアを用いた例です。PAL_AMBでは温湿度センサーはライブラリ内部のコードが呼ばれますが、このサンプルでは温湿度センサーのアクセスのための独自の手続きも含まれます。
TWELITE PAL を使用するためのアクト TWELITE PAL には標準的なPALアプリが書き込まれていますが、PALアプリを用いずアクトによる記述を行うことができます。MWXライブラリには、PALで使用するセンサーを動作させるための標準的な手続きが用意されています。
各種PAL基板用のサンプルです。PAL基板上のセンサー値を取得し、送信し、スリープします。
PAL_AMBPAL_MOT-singlePAL_MAG以下は応用例で、上記のアクトより少し複雑な記述になっています。
PAL_AMB_usenap は、数十msかかるセンサーの動作時間にTWELITEマイコンを短くスリープさせ、より省電力を目指すサンプルです。PAL_AMB_behavior は、ビヘイビアを用いた例です。PAL_AMBでは温湿度センサーはライブラリ内部のコードが呼ばれますが、このサンプルでは温湿度センサーのアクセスのための独自の手続きも含まれます。PAL_MOT_fifo は、加速度センサーのFIFOおよびFIFOの割り込みを用いて、サンプルを中断することなく、連続的に取得し無線送信するためのサンプルです。TWELITE CUE を使用するためのアクト PAL_MOT アクトが利用できます。軽微な修整が必要となる場合があります。
PAL_MOT-singlePAL_MOT_fifo は、加速度センサーのFIFOおよびFIFOの割り込みを用いて、サンプルを中断することなく、連続的に取得し無線送信するためのサンプルです。TWELITE ARIA を使用するためのアクト BRD_ARIA は、TWELITE ARIA を動作させるためのアクトです。BRD_I2C_TEMPHUMID は、I2C センサー利用のためのテンプレートですが、実装例として TWELITE ARIA で利用する SHT40 センサー用のコードが含まれます。PAL_AMB 用のアクトを修整することで利用できます。単体機能を紹介したアクト Unit-*は機能やAPIの紹介を目的としています。
最新版の入手 共通の記述 アクトのサンプル中で以下の項目は共通の設定項目になり、以下で解説します。
const uint32_t APP_ID = 0x1234abcd ;
const uint8_t CHANNEL = 13 ;
const char APP_FOURCHAR[] = "BAT1" ;
サンプルアクト共通として以下の設定をしています。
アプリケーションID 0x1234abcd チャネル 13 アプリケーションIDとチャネルはともに他のネットワークと混在しないようにする仕組みです。
アプリケーションIDが異なる者同士は、チャネルが同じであっても混信することはありません 。ただし、別のアプリケーションIDのシステムが頻繁に無線送信しているような場合はその無線送信が妨害となりますので影響が認められます。
チャネルは通信に使う周波数を決めます。TWELITE無線モジュールでは原則として16個のチャネルが利用でき 、通常のシステムでは実施しないような極めて例外的な場合を除いて、他のチャネルとは通信できません。
サンプルアクト共通の仕様として、パケットのペイロード(データ部)の先頭には4バイトの文字列(APP_FOURCHAR[])を格納しています。種別の識別性には1バイトで十分ですが、解説のための記述です。こういったシステム特有の識別子やデータ構造を含める ことも混信対策の一つであるといえます。
1.4.1.1 - act0..4 最初に試すシンプルなact(アクト)
act0 から始まるアクト(act)は、actを始める - Opening act で紹介されたものを収録しています。LEDやボタンの動作のみの単純なものですが、最初にお試しいただくことをお勧めします。
act0処理の記述がないテンプレート
act1Lチカ(LEDの点滅)
act2タイマーを用いたLチカ
act32つのタイマーを用いたLチカ
act4ボタン(スイッチ)を用いたLED点灯
1.4.1.2 - Scratch テンプレートコード
テンプレートとなるアクトです。
このアクトには以下が含まれます。
無線パケットの送信 (’t’ キー) スリープ (’s’キー) シリアルポートからの入力 - Serial ディジタル(ボタン)入力 - Buttons setup()
void setup () {
/*** SETUP section */
tx_busy = false;
// the twelite main class
<< TWENET:: appid(APP_ID) // set application ID (identify network group)
<< TWENET:: channel(CHANNEL) // set channel (pysical channel)
<< TWENET:: rx_when_idle(); // open receive circuit (if not set, it can't listen packts from others)
// Register Network
auto && nwk = the_twelite.network.use< NWK_SIMPLE> ();
nwk << NWK_SIMPLE:: logical_id(0xFE ); // set Logical ID. (0xFE means a child device with no ID)
/*** BEGIN section */
Buttons.begin(pack_bits(PIN_BTN), 5 , 10 ); // check every 10ms, a change is reported by 5 consequent values.
the_twelite.begin(); // start twelite!
/*** INIT message */
Serial << "--- Scratch act ---" << mwx:: crlf;
} the_tweliteを設定してアプリケーションID APP_ID, 無線チャネル CHANNEL、受信有を設定します。
またnwkを生成し、子機アドレス0xFEを指定しています。このアドレスは子機でアドレスを指定していない名無しの子機という意味です。
設定できるアドレスは0x00: 親機,0x01~0xEF: 子機, 0xFE:子機アドレス未指定の範囲です。
送信先として指定するアドレスは0x00は親機宛、0x01~0xEFは指定の親機アドレス、0xFEは任意の子機アドレス、0xFFは親機を含む任意のアドレスです。
またButtonsオブジェクトを初期化します。連続参照によるチャタリング抑制アルゴリズムです。10msごとに5回連続同じ値になれば対象のポート(PIN_BTNのみ)のHIGHまたはLOWを確定します。pack_bits(N1, N2, ..)は1UL<<N1 | 1UL << N2 | ...を行いビットマップを生成します。
the_twelite.begin(); // start twelite!
the_tweliteを開始するための手続きです。act0..4では出てきませんでしたがthe_tweliteの設定や各種ビヘイビアの登録を行った場合は、必ず呼び出すようにしてください。
begin()
void begin () {
Serial << "..begin (run once at boot)" << mwx:: crlf;
} 始動時setup()の後に1回だけ呼び出されます。メッセージの表示のみ。
loop()ボタン(スイッチ)の入力検出
if (Buttons.available()) {
uint32_t bm, cm;
Buttons.read(bm, cm);
if (cm & 0x80000000 ) {
// the first capture.
Serial << int (millis()) << ":BTN" << format("%b" ) << mwx:: crlf;
} Buttonsによる連続参照により状態を確定します。ボタン状態が変化したらシリアルに出力します。
シリアルからの入力
while (Serial.available()) {
int c = Serial.read();
Serial << '[' << char (c) << ']' ;
switch (c) {
case 'p' : ... // millis() を表示
case 't' : ... // 無線パケットを送信 (vTransmit)
if (! tx_busy) {
tx_busy = Transmit();
if (tx_busy) {
Serial << int (millis()) << ":tx request success! ("
<< int (tx_busy.get_value()) << ')' << mwx:: crlf;
} else {
Serial << int (millis()) << ":tx request failed" << mwx:: crlf;;
}
}
case 's' : ... // スリープする
<< int (millis()) << ":sleeping for " << 5000 << "ms" << mwx:: crlf << mwx:: flush;
the_twelite.sleep(5000 );
break ;
}
} Serial.available()がtrueの場合は、シリアルポートからの入力が保存されています。シリアルから1文字読み込んで、入力文字に応じた処理をします。
’t’を入力して無線送信 ’t’を入力したときは送信を行います。このサンプルではtx_busyフラグを用い連続的に入力は行わないようにしています。
送信要求は一定数までキューに保存されるため、キューの範囲(3パケット)で要求を積むことは可能です。
以下はif(!tx_busy)の判定をしないようにして ’tttt’と連続的に入力した場合の処理例です。4つ目の要求でキューが一杯になって要求は失敗しています。
Transmit()の.prepare_tx_packet()で得られたpktオブジェクトが false になります。
送信タイミングはランダム化されるため、送信完了は送信要求順にはなりません。
--- Scratch act ---
..begin (run once at boot)
[t]11591:Transmit()
11592:tx request success! (1)
[t]11593:Transmit()
11593:tx request success! (2)
[t]11594:Transmit()
11595:tx request success! (3)
[t]11595:Transmit()
TX QUEUE is FULL
11596:tx request failed
11654:tx completed!(id=2, stat=1)
11719:tx completed!(id=3, stat=1)
11745:tx completed!(id=1, stat=1)
’s’を入力してスリープ
5000ms=5秒のスリープを実施します。復帰後はwakeup()が実行されます。
wakeup()
void wakeup () {
Serial << int (millis()) << ":wake up!" << mwx:: crlf;
} スリープ起床時に最初に呼び出されます。メッセージの表示のみ。
Transmit()
MWX_APIRET Transmit () {
Serial << int (millis()) << ":Transmit()" << mwx:: crlf;
if (auto && pkt = the_twelite.network.use< NWK_SIMPLE> ().prepare_tx_packet()) {
// set tx packet behavior
<< tx_addr(0xFF ) // 同報通信=ブロードキャスト
<< tx_retry(0x1 ) // 再送1回
<< tx_packet_delay(100 ,200 ,20 ); // 送信時遅延100-200msの間に送信、再送間隔20ms
// 送信データの指定(アプリケーションごとに決める)
, make_pair("SCRT" , 4 ) // 4文字識別子
uint32_t (millis()) // タイムスタンプ
// 送信要求を行う
return pkt.transmit();
} else {
// .prepare_tx_packet() 時点で失敗している(送信キューが一杯)
<< "TX QUEUE is FULL" << mwx:: crlf;
return MWX_APIRET(false, 0 );
}
} 送信要求を行う最小限の手続きです。
この関数を抜けた時点では、まだ要求は実行されていません。しばらく待つ必要があります。この例では100-200msの送信開始の遅延を設定しているため、送信が開始されるのは早くて100ms後です。
on_tx_comp()
void on_tx_comp (mwx:: packet_ev_tx& ev, bool_t & b_handled) {
Serial << int (millis()) << ":tx completed!"
<< format("(id=%d, stat=%d)" , ev.u8CbId, ev.bStatus) << mwx:: crlf;
tx_busy = false; // clear tx busy flag.
送信完了時に呼び出されます。evには送信IDと完了ステータスが含まれます。
on_rx_packet()
void on_rx_packet (packet_rx& rx, bool_t & handled) {
Serial << format("rx from %08x/%d" ,
rx.get_addr_src_long(), rx.get_addr_src_lid()) << mwx:: crlf;
} パケットを受信したら、送信元のアドレス情報を表示します。
1.4.1.3 - Slp_Wk_and_Tx スリープ起床時にパケットを送信する
Slp_Wk_and_Tx は、定期起床後、何か実行(センサーデータの取得など)を行って、その結果を無線パケットとして送信するようなアプリケーションを想定した、テンプレートソースコードです。
setup(), loop() の形式では、どうしても loop() 中が判読しづらい条件分岐が発生しがちです。本actでは、loop()中をSM_SIMPLEステートマシンを用いて _switch_構文による単純な状態遷移を用いることで、コードの見通しを良くしています。
このアクトには以下が含まれます。
代表的な間欠動作(スリープ→起床→計測→無線送信→スリープ)の制御構造 送信パケットの生成と送信手続き、完了待ち アクトの機能 起動後、初期化処理を経て、一旦スリープするsetup() 初期化するbegin() スリープ実行する スリープ起床後、状態変数を初期化し、以下の順に動作を行うwakeup()スリープからの起床、各初期化を行うloop()状態INIT->WORK_JOBに遷移: 何らかの処理を行う(このactでは 1ms ごとの TickCount ごとにカウンタを更新し乱数で決めたカウント後にTX状態に進む)loop() 状態TX送信要求を行うloop() 状態WAIT_TX送信完了待ちを行うloop() 状態EXIT_NORMALスリープする (1. に戻る) loop() 状態EXIT_FATAL エラーが発生した場合は、モジュールリセットするアクトの解説 宣言部 インクルード
#include <TWELITE>
#include <NWK_SIMPLE>
#include <SM_SIMPLE>
#include "Common.h" パケット送信を行うため <NWK_SIMPLE> をインクルードしています。また、アプリケーションIDなど基本的な定義は "Common.h" に記述しています。
状態定義 loop()内の順次処理を記述うするため、このサンプルではステートマシン(状態遷移)の考え方を用います。ごく単純な状態遷移の処理をまとめた<SM_SIMPLE>を用います。
Common.h に以下の状態に対応する列挙体 STATE が定義されています。
enum class STATE {
INIT = 0 , // INIT STATE
// do some job (e.g sensor capture)
// reuest transmit
// wait its completion
// normal exiting.
// has a fatal error (will do system reset)
状態を示す列挙体STATEを用いてSM_SIMPLEステートマシン(状態遷移)を宣言します。
ここで宣言されたstepは、状態の管理、タイムアウト、処理待ちを行うための機能が含まれています。
センサーデータ このサンプルではセンサーデーターの処理は行いませんが、ダミーデータを用意しておきます。
struct {
uint16_t dummy_work_ct_now;
uint16_t dummy_work_ct_max; // counter for dummy work job.
setup()
void setup () {
/*** SETUP section */
step.setup(); // init state machine
// the twelite main class
<< TWENET:: appid(APP_ID) // set application ID (identify network group)
<< TWENET:: channel(CHANNEL) // set channel (pysical channel)
<< TWENET:: rx_when_idle(false); // open receive circuit (if not set, it can't listen packts from others)
// Register Network
auto && nwk = the_twelite.network.use< NWK_SIMPLE> ();
nwk << NWK_SIMPLE:: logical_id(DEVICE_ID); // set Logical ID.
/*** BEGIN section */
the_twelite.begin(); // start twelite!
/*** INIT message */
Serial << "--- Sleep an Tx Act ---" << crlf;
} 変数やクラスオブジェクトの初期化を行います。
stepステートマシンの初期化the_tweliteクラスオブジェクトの初期化ネットワーク <NWK_SIMPLE> の登録と初期化(DEVICE_IDの登録)を行います。 つづいてクラスオブジェクトやハードウェアなどの開始処理を行います。
the_twelite.begin(); // start twelite!
the_tweliteを開始するための手続きです。act0..4では出てきませんでしたがthe_tweliteの設定や各種ビヘイビアの登録を行った場合は、必ず呼び出すようにしてください。
begin()
void begin () {
Serial << "..begin (run once at boot)" << crlf;
SleepNow();
} setup()の直後に一度だけ呼び出されます。SleepNow()関数を呼び出して初回のスリープ手続きを行います。
wakeup()
void wakeup () {
memset(& sensor, 0 , sizeof (sensor));
Serial << crlf << int (millis()) << ":wake up!" << crlf;
} 起床直後に呼び出されます。ここではセンサーデータ領域の初期化と、起床時のメッセージを出力しています。
loop()
void loop () {
do {
switch (step.state()) {
case STATE:: INIT:
sensor.dummy_work_ct_now = 0 ;
sensor.dummy_work_ct_max = random(10 ,1000 );
step.next(STATE:: WORK_JOB);
break ;
...
}
} while (step.b_more_loop());
} 上記のコードは、実際のコードを簡略化したものです。
この制御構造はSM_SIMPLEステートマシンを利用しています。do..while() 構文のループになっています。ループの中はswitch case節となっていて、.state()で得られた状態により処理を分岐しています。状態の遷移は.next()を呼び出しステートマシン内の内部変数を新しい状態値に書き換えます。
step.b_more_loop()は、.next()により状態遷移があった場合 true に設定されます。これは状態遷移が発生したときloop()を脱出せずに次の状態のコード(case節)を実行する目的です。
以下に各状態の解説を行います。
STATE::INIT
sensor.dummy_work_ct_now = 0 ;
sensor.dummy_work_ct_max = random(10 ,1000 );
step.next(STATE:: WORK_JOB); ダミーーのセンサー値を初期化します。一つは加算カウンタ、一つはカウンター停止値でランダムに決定しています。
STATE::WORK_JOB
if (TickTimer.available()) {
Serial << '.' ;
sensor.dummy_work_ct_now++ ;
if (sensor.dummy_work_ct_now >= sensor.dummy_work_ct_max) {
Serial << crlf;
step.next(STATE:: TX);
}
} WORK_JOB状態では1msごとのタイマー単位で処理します。TickタイマーごとにTickTimer.available()になります。Tickタイマーごとにカウンタを加算しdummy_work_ct_maxになったら、次の状態STATE::TXに遷移します。
STATE::TX
if (Transmit()) {
Serial << int (millis()) << ":tx request success!" << crlf;
step.set_timeout(100 );
step.clear_flag();
step.next(STATE:: WAIT_TX);
} else {
// normall it should not be here.
<< int (millis()) << "!FATAL: tx request failed." << crlf;
step.next(STATE:: EXIT_FATAL);
} Transmit()関数を呼び出しパケット送信要求を行います。送信要求が成功した場合はSTATE::WAIT_TXEVENTに遷移して送信完了を待つことになります。ここでは完了待ちとしてSM_SIMPLEステートマシンのタイムアウトとフラッグ機能を用います(待ちループ中での変数値の変化により判定する単純なものです)。
単一の送信要求が失敗することは通常想定しませんが、失敗時はSTATE::EXIT_FATALとして例外処理する状態に遷移します。
この時点ではまだパケットが送信されていないため、この時点でスリープをしてはいけません。多くの場合、送信完了を待ってから、続く処理を行います。
Transmit()関数はMWX_APIRETオブジェクトを返しますが、このオブジェクトはbool型の成功の可否と、最大31ビットの値を保持しています。bool型として評価できますから、if文の判定は送信要求が成功したら true、失敗したらfalseを返します。
STATE::WAIT_TX
if (step.is_flag_ready()) {
Serial << int (millis()) << ":tx completed!" << crlf;
step.next(STATE:: EXIT_NORMAL);
} else if (step.is_timeout()) {
Serial << int (millis()) << "!FATAL: tx timeout." << crlf;
step.next(STATE:: EXIT_FATAL);
} 送信完了待ちは後述のon_tx_comp()によりステートマシン機能のフラッグをセットすることで判定しています。タイムアウトは.is_timeout()を呼び出すことで.set_timeout()を行ったときからの経過時間により判定します。
送信が成功しても失敗しても通常は完了通知がありますが、タイムアウトを設け例外処理のための状態STATE::EXIT_FATALに遷移します。
STATE::EXIT_NORMAL
SleepNow()を呼び出して、スリープ処理に入ります。
STATE::EXIT_FATAL
Serial << crlf << "!FATAL: RESET THE SYSTEM." ;
delay(1000 ); // wait a while.
重大なエラーとして、システムリセットを行います。
SleepNow()
void SleepNow () {
uint16_t u16dur = SLEEP_DUR;
u16dur = random(SLEEP_DUR - SLEEP_DUR_TERMOR, SLEEP_DUR + SLEEP_DUR_TERMOR);
Serial << int (millis()) << ":sleeping for " << int (u16dur) << "ms" << crlf;
Serial.flush();
step.on_sleep(); // reset status of statemachine to INIT state.
the_twelite.sleep(u16dur, false);
} 周期スリープを行います。スリープ時間はrandom()関数を用いて、一定の時間ブレを作っています。これは複数のデバイスの送信周期が同期した場合、著しく失敗率が上がる場合があるためです。
スリープ前にはSM_SIMPLEステートマシンの状態を.on_sleep()を呼び出してセットしておきます。
Transmit()
MWX_APIRET vTransmit () {
Serial << int (millis()) << ":vTransmit()" << crlf;
if (auto && pkt = the_twelite.network.use< NWK_SIMPLE> ().prepare_tx_packet()) {
// set tx packet behavior
<< tx_addr(0x00 ) // 0..0xFF (LID 0:parent, FE:child w/ no id, FF:LID broad cast), 0x8XXXXXXX (long address)
<< tx_retry(0x1 ) // set retry (0x3 send four times in total)
<< tx_packet_delay(0 ,0 ,2 ); // send packet w/ delay (send first packet with randomized delay from 0 to 0ms, repeat every 2ms)
// prepare packet payload
// set payload data objects.
4 ) // string should be paired with length explicitly.
uint32_t (millis()) // put timestamp here.
uint16_t (sensor.dummy_work_ct_now) // put dummy sensor information.
// do transmit
//return nwksmpl.transmit(pkt);
return pkt.transmit();
}
return MWX_APIRET(false, 0 );
} ID=0x00の親機宛に無線パケットの送信要求を行います。格納されるデータはActサンプルで共通に使われている4文字識別子(FOURCC)に加え、システム時間[ms]とダミーセンサー値(sensor.dummy_work_ct_now)を格納します。
まず最初に送信パケットを格納するオブジェクトを取得します。このオブジェクトを操作し、送信データや条件を設定します。
if (auto && pkt = the_twelite.network.use< NWK_SIMPLE> ().prepare_tx_packet()) { MWX ライブラリでは、if文中でオブジェクトを取得し、そのオブジェクトのbool判定でtrueの場合に処理を行う記述を採用しています。
ここではthe_twelite.network.use<NWK_SIMPLE>()によりボードオブジェクトを取得し、ボードオブジェクトの.prepare_tx_packet()によりパケットオブジェクトを取得しています。パケットオブジェクトの取得失敗は通常想定しませんが、失敗時は送信キューが一杯で送信要求が受け付けられない場合です。このサンプルは単一の送信のみですから、エラーは想定外の重大な問題に限られます。
pkt << tx_addr(0x00 ) // 宛先
<< tx_retry(0x1 ) // 再送回数
<< tx_packet_delay(0 ,0 ,2 ); // 送信遅延
得られたpktオブジェクトに対して、送信条件(宛先や再送など)を<<演算子を用いて設定します。
tx_addrはパケットの宛先を指定します。tx_retryは再送回数、tx_packet_delayは送信遅延の指定です。
pack_bytes(pkt.get_payload() // set payload data objects.
4 ) // string should be paired with length explicitly.
uint32_t (millis()) // put timestamp here.
uint16_t (sensor.dummy_work_ct_now) // put dummy sensor information.
パケットのペイロード(データ部分)はpkt.get_payload()により得られるsmblbuf<uint8_t>派生の配列です。この配列に対して直接値を設定しても構いませんが、ここではpack_bytes()を用いた値の設定を行います。
ペイロードの最大長は上記の例では91バイトですが、詳しくはNWK_SIMPLEパケット構造と最大長を参照ください。
この関数は可変数引数により指定できます。一番最初のパラメータは.get_payload()より得られた配列オブジェクトです。
make_pair(FOURCC,4) : make_pairはC++標準ライブラリのもので、std::pairオブジェクトを生成します。文字列型に対して先頭から4バイト分を書き出すという意味になります。(文字列型の配列は終端を含める、含めないといった話題が混乱を生むため、明示的に書き出すバイト数を指定するために、このような指定をします)uint32_t型のデータを指定するとビッグエンディアン並びで4バイト分のデータを書き込みます。uint16_t型のデータについても同様です。
uint8_t 型のポインタを用いてデータの書き込みを行うことも出来ます。
auto && pay = pkt.get_payload(); // get buffer object.
// the following code will write data directly to internal buffer of `pay' object.
uint8_t * p = pay.begin(); // get the pointer of buffer head.
S_OCTET(p, FOURCC[0 ]); // store byte at pointer `p' and increment the pointer.
1 ]);
S_OCTET(p, FOURCC[2 ]);
S_OCTET(p, FOURCC[3 ]);
S_DWORD(p, millis()); // store uint32_t data.
// store uint16_t data.
pay.redim(p - pay.begin()); .get_payload()から得られた配列オブジェクトは、何も格納されていないサイズ0の配列ですが、この配列にデータを書き込むことでサイズが拡張され(実際は内部の固定長のバッファに対してデータを書き込み、内部管理のデータサイズを更新します)、最終的なサイズがペイロードのデータサイズです。
ここでは.begin()を用いてuint8_t*のポインタを得て、このポインタを用いてデータを書き込み、最後に書き込んだサイズを.redim()で設定します。
S_OCTET(), S_WORD(), S_DWORD()といった関数を書き込みに用いていますが、例えばS_OCTET(p, 'H')は *p = 'H'; p++;と同じ処理を行うポインタを用いたデータ書き込みです。
最後の.redim()は配列のサイズをバッファの初期化をせずに 変更する手続きです。.resize()を呼び出すとすべて0クリアされます。
最後に.transmit()を呼び出して、送信要求を行います。戻り値はMWX_APIRET型です。要求後、実際の送信が行われますが、送信パラメータや送信サイズにもよりますが、完了まで数ms~数十ms程度はかかります。完了時にはon_tx_comp()が呼び出されます。
MWX_APIRETはuint32_t型をラップしたクラスで、MSBを失敗成功のフラグとし、以下31ビットをデータとして用いています。pkt.transmit()の戻り型になっており、送信要求の成功と失敗(bool型へのキャスト)ならびに送信IDをデータ部(.get_value())に格納しています。
on_tx_comp()
void on_tx_comp (mwx:: packet_ev_tx& ev, bool_t & b_handled) {
step.set_flag(ev.bStatus);
} 送信完了時に呼び出されるシステムイベントです。ここでは.set_flag()により完了としています。
1.4.1.4 - Parent_MONOSTICK 親機アプリケーション(MONOSTICK用)
MONOSTICKを親機として使用するアクトです。子機からのパケットのデータペイロードをシリアルポートに出力します。サンプルアクトの多くのサンプルでのパケットを表示することが出来ます。
このアクトには以下が含まれます。
無線パケットの受信 受信したパケットのデータ解釈 インタラクティブモードの設定 - <STG_STD> バイト列のアスキー形式への変換 - serparser アクトの機能 サンプルアクトの子機からのパケットを受信して、シリアルポートへ出力する。 アクトの使い方 必要なTWELITEと配線 役割 例 親機 MONOSTICK BLUE/RED 子機 サンプルアクトの子機に設定したTWELITEシリーズ(例: Slp_Wk_and_Tx, PAL_AMB, PAL_MAG, PAL_MOT???など)
最初は以下のデフォルトの設定にて確認してください。
アプリケーションID: 0x1234abcd チャネル: 13 アクトの解説 宣言部 インクルード
// use twelite mwx c++ template library
#include <TWELITE>
#include <MONOSTICK>
#include <NWK_SIMPLE>
#include <STG_STD> MONOSTICK用のボードビヘイビア<MONOSTICK>をインクルードしています。このボードサポートには、LEDの制御、ウォッチドッグ対応が含まれます。
<NWK_SIMPLE> 簡易中継ネットの定義を読み込みます<STG_STD> インタラクティブモードの定義を読み込みます。その他
// application ID
const uint32_t DEFAULT_APP_ID = 0x1234abcd ;
// channel
const uint8_t DEFAULT_CHANNEL = 13 ;
// option bits
uint32_t OPT_BITS = 0 ;
/*** function prototype */
bool analyze_payload (packet_rx& rx); デフォルト値や関数プロトタイプなどの宣言をしています。
setup()
auto && brd = the_twelite.board.use< MONOSTICK> ();
auto && set = the_twelite.settings.use< STG_STD> ();
auto && nwk = the_twelite.network.use< NWK_SIMPLE> (); setup()では、まず<MONOSTICK>ボードビヘイビア、<STG_STD>インタラクティブモード ビヘイビア、<NWK_SIMPLE>ビヘイビアをuse<>を用い読み込みます。この手続きは必ずsetup()内で行います。
set << SETTINGS:: appname("PARENT" ); // 設定画面中のタイトル
<< SETTINGS:: appid_default(DEFAULT_APP_ID); // アプリケーションIDデフォルト
<< SETTINGS:: ch_default(DEFAULT_CHANNEL); // チャネルデフォルト
<< SETTINGS:: lid_default(0x00 ); // LIDデフォルト
:: OPT_DWORD2, E_STGSTD_SETID:: OPT_DWORD3, E_STGSTD_SETID:: OPT_DWORD4, E_STGSTD_SETID:: ENC_KEY_STRING, E_STGSTD_SETID:: ENC_MODE);
set.reload(); // 設定を不揮発性メモリから読み出す
= set.u32opt1(); // 読み込み例(オプションビット)
続いてインタラクティブモードの設定と設定値の読み出しを行います。<STG_STD>インタラクティブモードでは、標準的な項目が用意されていますが、作成するアクトごとにいくつかのカスタマイズを行えるようになっています。
appname→ 設定画面中のタイトル行にでるアクト名称appid_default→ デフォルトのアプリケーションIDch_default→ デフォルトのチャネルlid_default→ デバイスID(LID)のデフォルト値.hide_items()→ 項目の非表示設定設定値を読み出す前には必ず.reload()を呼び出します。設定値は.u32opt1()のように設定値ごとに読み出し用のメソッドが用意されています。
the_twelite
<< set // インタラクティブモードの設定を反映
<< TWENET:: rx_when_idle() // 受信するように指定
// Register Network
<< set; // インタラクティブモードの設定を反映
<< NWK_SIMPLE:: logical_id(0x00 ) // LIDだけは再設定
いくつかの設定値は<STG_STD>オブジェクトを用いて直接反映することが出来ます。また、DIPスイッチの設定などにより特定の値を書き換えたいような場合などは、反映されたあとに別個に値を書き換えることも出来ます。上記の例ではthe_tweliteオブジェクトにアプリケーションID、チャネル、無線出力などを設定し、nwkオブジェクトに対してLIDと再送回数の設定をしてから、再度LIDを0に設定し直しています。
brd.set_led_red(LED_TIMER:: ON_RX, 200 ); // RED (on receiving)
:: BLINK, 500 ); // YELLOW (blinking)
<MONOSTICK>ボードビヘイビアではLED点灯制御のための手続きを利用できます。
1行目では赤色のLEDを無線パケットを受信したら200ms点灯する設定をしています。最初のパラメータはLED_TIMER::ON_RXが無線パケット受信時を意味します。2番目は点灯時間をmsで指定します。
2行目はLEDの点滅指定です。1番目のパラメータはLED_TIMER::BLINKが点滅の指定で、2番目のパラメータは点滅のON/OFF切り替え時間です。500msごとにLEDが点灯、消灯(つまり1秒周期の点滅)を繰り返します。
the_twelite.begin(); // start twelite!
the_tweliteを開始するための手続きです。act0..4では出てきませんでしたがthe_tweliteの設定や各種ビヘイビアの登録を行った場合は、必ず呼び出すようにしてください。
loop()このサンプルではloop()中の処理はありません。
on_rx_packet()パケットを受信したときに呼び出されるコールバック関数です。この例では受信したパケットデータに対していくつかの出力を行っています。
void on_rx_packet (packet_rx& rx, bool_t & handled) {
Serial << ".. coming packet (" << int (millis()& 0xffff ) << ')' << mwx:: crlf;
...
// packet analyze
} analyze_payload関数の末尾で呼び出されるanalyze_payload()は、いくつかのサンプルアクトのパケットを解釈するコードが含まれています。サンプルアクト中のパケット生成部分と対応させてコードを参照してください。
bool b_handled = false;
uint8_t fourchars[4 ]{};
auto && np = expand_bytes(
rx.get_payload().begin(), rx.get_payload().end()
, fourchars
);
if (np == nullptr ) return ;
// display fourchars at first
<< fourchars
<< format("(ID=%d/LQ=%d)" , rx.get_addr_src_lid(), rx.get_lqi())
<< "-> " ; この関数では最初に4文字識別データをfourchars[5]配列に読み込みます。
読み込みはexpand_bytes()関数を用います。この関数の第1・第2パラメータはC++の標準ライブラリの作法に倣い、受信パケットのペイロード部の先頭ポインタ.begin()と末尾ポインタの次.end()を与えます。続くパラメータは可変引数として、読み込むデータ変数を与えます。戻り値はエラー時はnullptr、それ以外は次の解釈ポインタとなります。末尾まで解釈した場合は.end()が戻ります。ここでのパラメータはuint8_t fourchars[4]です。
この記述で対応するのは配列長さNが指定されるuint8_t[N]型のみで、uint8*型、char*型、char[]型などを用いる場合は、make_pair(char*,int)を用いた指定が必要になります。
char fourchars[5 ]{}; // 終端文字\0も含め5バイト確保する
auto && np = expand_bytes(
rx.get_payload().begin(), rx.get_payload().end()
, make_pair((char * )fourchars, 4 )
); つづいて4バイトヘッダに対応した処理を行います。ここではサンプルアクトSlp_Wk_and_Txのパケットを解釈し内容を表示します。
// Slp_Wk_and_Tx
if (! b_handled && ! strncmp(fourchars, "TXSP" , 4 )) {
b_handled = true;
uint32_t tick_ms;
uint16_t u16work_ct;
np = expand_bytes(np, rx.get_payload().end()
, tick_ms
, u16work_ct
);
if (np != nullptr ) {
Serial << format("Tick=%d WkCt=%d" , tick_ms, u16work_ct);
} else {
Serial << ".. error .." ;
}
} 他の解釈部の判定をスキップするようにb_handledをtrueに設定します。
"TXSP"のパケットではuint32_t型のシステムタイマーカウントと、uint16_t型のダミーカウンタの値が格納されています。各々変数を宣言してexpand_bytes()関数を用い読み込みます。上述と違うのは、読み出しの最初のポインタとして第一パラメータがnpとなっている点です。tick_msとu16work_ctをパラメータとして与え、ビッグエンディアン形式のバイト列としてペイロードに格納された値を読み出します。
読み出しに成功すれば内容を出力して終了です。
独自のアスキー書式を定義して出力する ユーザが定義した並び順でアスキー形式により構成します。
smplbuf_u8< 128 > buf;
mwx:: pack_bytes(buf
, uint8_t (rx.get_addr_src_lid()) // 送信元の論理ID
uint8_t (0xCC ) // 0xCC
uint8_t (rx.get_psRxDataApp()-> u8Seq) // パケットのシーケンス番号
uint32_t (rx.get_addr_src_long()) // 送信元のシリアル番号
uint32_t (rx.get_addr_dst()) // 宛先アドレス
uint8_t (rx.get_lqi()) // LQI:受信品質
uint16_t (rx.get_length()) // 以降のバイト数
// データペイロード
serparser_attach pout;
pout.begin(PARSER:: ASCII, buf.begin(), buf.size(), buf.size());
Serial << "FMT PACKET -> " ;
pout >> Serial;
Serial << mwx:: flush; 1行目はアスキー書式に変換する前のデータ列を格納するバッファをローカルオブジェクトとして宣言しています。
2行目はpack_bytes()を用いてデータ列を先ほどのbufに格納します。データ構造はソースコードのコメントを参照ください。pack_bytes()のパラメータにはsmplbuf_u8 (smplbuf<uint8_t, ???>)形式のコンテナを指定することもできます。
パケットのシーケンス番号は、<NWK_SIMPLE>で自動設定され、送信パケット順に割り振られます。この値はパケットの重複検出に用いられます。
LQI (Link Quality Indicator)は受信時の電波強度に相当する値で、値が大きければ大きいほどより強い電界強度で受信できていることになります。ただしこの値と物理量との厳格な関連は定義されていませんし、環境のノイズと相対的なものでLQIがより大きな値であってもノイズも多ければ通信の成功率も低下することになります。
13,14,17行目は、シリアルパーサーの宣言と設定、出力です。
NWK_SIMPLEのヘッダを含めてダンプ出力する 最初の出力(if(0)により実行されないようになっています)は<NWK_SIMPLE>の制御データを含めたデータをすべて表示します。制御データは11バイトあります。通常は制御情報を直接参照することはありませんが、あくまでも参考です。
serparser_attach pout;
pout.begin(PARSER:: ASCII, rx.get_psRxDataApp()-> auData,
rx.get_psRxDataApp()-> u8Len, rx.get_psRxDataApp()-> u8Len);
Serial << "RAW PACKET -> " ;
pout >> Serial;
Serial << mwx:: flush;
// 参考:制御部のパケット構造
// uint8_t : 0x01 固定
// uint8_t : 送信元のLID
// uint32_t : 送信元のロングアドレス(シリアル番号)
// uint32_t : 宛先アドレス
// uint8_t : 中継回数
1行目は出力用のシリアルパーサをローカルオブジェクトとして宣言しています。内部にバッファを持たず、外部のバッファを流用し、パーサーの出力機能を用いて、バッファ内のバイト列をアスキー形式出力します。
2行目はシリアルパーサーのバッファを設定します。すでにあるデータ配列、つまり受信パケットのペイロード部を指定します。serparser_attach poutは、既にあるバッファを用いたシリアルパーサーの宣言です。pout.begin()の1番目のパラメータは、パーサーの対応書式をPARSER::ASCIIつまりアスキー形式として指定しています。2番目はバッファの先頭アドレス。3番目はバッファ中の有効なデータ長、4番目はバッファの最大長を指定します。出力用で書式解釈に使わないため4番目のパラメータは3番目と同じ値を入れています。
6行目でシリアルポートへ>>演算子を用いて出力しています。
7行目のSerial << mwx::flushは、ここで出力が終わっていないデータの出力が終わるまで待ち処理を行う指定です。(Serial.flush()も同じ処理です)
1.4.1.5 - PingPong パケットを打ち返す
2台のシリアル接続しているTWELITEの片方からPING(ピン)の無線パケットを送信すると、他方からPONG(ポン)の無線パケットが返ってきます。
このアクトには以下が含まれます。
無線パケットの受信からの速やかな応答送信 相手のアドレスを直接指定した送信 シリアルポートからの入力 - Serial ディジタル(ボタン)入力 - Buttons アナログ入力 - Analogue アクトの使い方 必要なTWELITE いずれかを2台用意します。
MONOSTICK BLUE / RED TWELITE R シリーズ でUART接続した TWELITE DIP など アクトの解説 宣言部 インクルード
// use twelite mwx c++ template library
#include <TWELITE>
#include <NWK_SIMPLE> 全てのアクトで<TWELITE>をインクルードします。ここでは、シンプルネットワーク <NWK_SIMPLE> をインクルードしておきます。
その他
// application ID
const uint32_t APP_ID = 0x1234abcd ;
// channel
const uint8_t CHANNEL = 13 ;
// DIO pins
const uint8_t PIN_BTN = 12 ;
/*** function prototype */
void vTransmit (const char * msg, uint32_t addr);
/*** application defs */
// packet message
const int MSG_LEN = 4 ;
const char MSG_PING[] = "PING" ;
const char MSG_PONG[] = "PONG" ; サンプルアクト共通宣言 長めの処理を関数化しているため、そのプロトタイプ宣言(送信と受信) アプリケーション中のデータ保持するための変数 setup()
void setup () {
/*** SETUP section */
Buttons.setup(5 ); // init button manager with 5 history table.
50 ); // setup analogue read (check every 50ms)
// the twelite main class
<< TWENET:: appid(APP_ID) // set application ID (identify network group)
<< TWENET:: channel(CHANNEL) // set channel (pysical channel)
<< TWENET:: rx_when_idle(); // open receive circuit (if not set, it can't listen packts from others)
// Register Network
auto && nwksmpl = the_twelite.network.use< NWK_SIMPLE> ();
nwksmpl << NWK_SIMPLE:: logical_id(0xFE ) // set Logical ID. (0xFE means a child device with no ID)
<< NWK_SIMPLE:: repeat_max(3 ); // can repeat a packet up to three times. (being kind of a router)
/*** BEGIN section */
Buttons.begin(pack_bits(PIN_BTN), 5 , 10 ); // check every 10ms, a change is reported by 5 consequent values.
:: A1, PIN_ANALOGUE:: VCC)); // _start continuous adc capture.
the_twelite.begin(); // start twelite!
/*** INIT message */
Serial << "--- PingPong sample (press 't' to transmit) ---" << mwx:: crlf;
} 大まかな流れは、各部の初期設定、各部の開始となっています。
the_tweliteこのオブジェクトはTWENETを操作するための中核クラスオブジェクトです。
// the twelite main class
<< TWENET:: appid(APP_ID) // set application ID (identify network group)
<< TWENET:: channel(CHANNEL) // set channel (pysical channel)
<< TWENET:: rx_when_idle(); // open receive circuit (if not set, it can't listen packts from others)
the_twelite に設定を反映するには << を用います。
TWENET::appid(APP_ID) アプリケーションIDの指定TWENET::channel(CHANNEL) チャネルの指定TWENET::rx_when_idle() 受信回路をオープンにする指定
<<, >>演算子はC言語におけるビットシフト演算子ですが、ここではその意味合いとは異なる挿入演算子(stream insertion operator)として使用しています。MWXライブラリでは、C++標準ライブラリの入出力利用にならって上記のような設定やシリアルポートの入出力等で利用します。
ただし、以下の記述は MWX ライブラリでは利用できません。
#include <iostream>
:: cout << "hello world" << std:: endl; 次にネットワークを登録します。
auto && nwksmpl = the_twelite.network.use< NWK_SIMPLE> ();
nwksmpl << NWK_SIMPLE:: logical_id(0xFE );
<< NWK_SIMPLE:: repeat_max(3 ); 1行目は、ボードの登録と同じ書き方で <> には <NWK_SIMPLE>を指定します。
2行目は、<NWK_SIMPLE>の設定で、0xFE(ID未設定の子機)という指定を行います。
3行目は、中継回数の最大値を指定しています。この解説では中継には触れませんが、複数台で動作させたときにパケットの中継が行われます。
the_twelite.begin(); // start twelite!
setup() 関数の末尾で the_twelite.begin() を実行しています。
AnalogueADC(アナログディジタルコンバータ)を取り扱うクラスオブジェクトです。
初期化Analogue.setup()で行います。パラメータのtrueはADC回路の安定までその場で待つ指定です。
Analogue.begin(pack_bits(PIN_ANALOGUE:: A1, PIN_ANALOGUE:: VCC), 50 ); ADCを開始するにはAnalogue.begin()を呼びます。パラメータはADC対象のピンに対応するビットマップです。
ビットマップを指定するのにpack_bits()関数を用います。可変数引数の関数で、各引数には1を設定するビット位置を指定します。例えばpack_bits(1,3,5)なら2進数で 101010の値が戻ります。この関数はconstexpr指定があるため、パラメータが定数のみであれば定数に展開されます。
パラメータにはPIN_ANALOGUE::A1(ADC0)とPIN_ANALOGUE::VCC(モジュール電源電圧)が指定されています。
2番目のパラメータには50が指定されています。ADCの動作はデフォルトではTickTimerで開始されていて、初回を除き ADC の開始は、割り込みハンドラ内で行います。
DIO (ディジタル入力) の値の変化を検出します。Buttonsでは、メカ式のボタンのチャタリング(摺動)の影響を軽減するため、一定回数同じ値が検出されてから、値の変化とします。
初期化は Buttons.setup()で行います。パラメータの 5 は、値の確定に必要な検出回数ですが、設定可能な最大値を指定します。内部的にはこの数値をもとに内部メモリの確保を行っています。
Buttons.begin(pack_bits(PIN_BTN),
5 , // history count
10 ); // tick delta
開始は Buttons.begin() で行います。1番目のパラメータは検出対象のDIOです。BRD_APPTWELITE::に定義されるPIN_BTN (12) を指定しています。2番めのパラメータは状態を確定するのに必要な検出回数です。3番めのパラメータは検出間隔です。10を指定しているので10msごとに5回連続で同じ値が検出できた時点で、HIGH, LOWの状態が確定します。
ButtonsでのDIO状態の検出はイベントハンドラで行います。イベントハンドラは、割り込み発生後にアプリケーションループで呼ばれるため割り込みハンドラに比べ遅延が発生します。
SerialSerial オブジェクトは、初期化や開始手続きなく利用できます。
Serial << "--- PingPong sample (press 't' to transmit) ---" << mwx:: crlf; シリアルポートへの文字列出力を行います。mwx::crlfは改行文字です。
loop()ループ関数は TWENET ライブラリのメインループからコールバック関数として呼び出されます。ここでは、利用するオブジェクトが available になるのを待って、その処理を行うのが基本的な記述です。ここではアクトで使用されているいくつかのオブジェクトの利用について解説します。
TWENET ライブラリのメインループは、事前にFIFOキューに格納された受信パケットや割り込み情報などをイベントとして処理し、そののちloop()が呼び出されます。loop()を抜けた後は CPU が DOZE モードに入り、低消費電流で新たな割り込みが発生するまでは待機します。
したがってCPUが常に稼働していることを前提としたコードはうまく動作しません。
void loop () {
// read from serial
while (Serial.available()) {
int c = Serial.read();
Serial << mwx:: crlf << char (c) << ':' ;
switch (c) {
case 't' :
vTransmit(MSG_PING, 0xFF );
break ;
default :
break ;
}
}
// Button press
if (Buttons.available()) {
uint32_t btn_state, change_mask;
Buttons.read(btn_state, change_mask);
// Serial << fmt("<BTN %b:%b>", btn_state, change_mask);
if (! (change_mask & 0x80000000 ) && (btn_state && (1UL << PIN_BTN))) {
// PIN_BTN pressed
0xFF );
}
}
} Serial
while (Serial.available()) {
int c = Serial.read();
Serial << mwx:: crlf << char (c) << ':' ;
switch (c) {
case 't' :
vTransmit(MSG_PING, 0xFF );
break ;
default :
break ;
}
} Serial.available()がtrueの間はシリアルポートからの入力があります。内部のFIFOキューに格納されるためある程度の余裕はありますが、速やかに読み出すようにします。データの読み出しはSerial.read()を呼びます。
ここでは't'キーの入力に対応してvTransmit()関数を呼び出しPINGパケットを送信します。
DIO(ディジタルIO)の入力変化を検出したタイミングで available になり、Buttons.read()により読み出します。
if (Buttons.available()) {
uint32_t btn_state, change_mask;
Buttons.read(btn_state, change_mask); 1番目のパラメータは、現在のDIOのHIGH/LOWのビットマップで、bit0から順番にDIO0,1,2,.. と並びます。例えば DIO12 であれば btn_state & (1UL << 12) を評価すれば HIGH / LOW が判定できます。ビットが1になっているものがHIGHになります。
初回のIO状態確定時は MSB (bit31) に1がセットされます。スリープ復帰時も初回の確定処理を行います。
// Serial « fmt("<BTN %b:%b>", btn_state, change_mask);
if (!(change_mask & 0x80000000) && (btn_state && (1UL « PIN_BTN))) {
// PIN_BTN pressed
vTransmit(MSG_PING, 0xFF);
初回確定以外の場合かつPIN_BTNのボタンが離された タイミングでvTransmit()を呼び出しています。押したタイミングにするには(!(btn_state && (1UL << PIN_BTN)))のように条件を論理反転します。
transmit()無線パケットの送信要求をTWENETに行う関数です。本関数が終了した時点では、まだ無線パケットの処理は行われません。実際に送信が完了するのは、送信パラメータ次第ですが、数ms後以降になります。ここでは代表的な送信要求方法について解説します。
void vTransmit (const char * msg, uint32_t addr) {
Serial << "vTransmit()" << mwx:: crlf;
if (auto && pkt = the_twelite.network.use< NWK_SIMPLE> ().prepare_tx_packet()) {
// set tx packet behavior
<< tx_addr(addr) // 0..0xFF (LID 0:parent, FE:child w/ no id, FF:LID broad cast), 0x8XXXXXXX (long address)
<< tx_retry(0x3 ) // set retry (0x3 send four times in total)
<< tx_packet_delay(100 ,200 ,20 ); // send packet w/ delay (send first packet with randomized delay from 100 to 200ms, repeat every 20ms)
// prepare packet payload
// set payload data objects.
// string should be paired with length explicitly.
uint16_t (analogRead(PIN_ANALOGUE:: A1)) // possible numerical values types are uint8_t, uint16_t, uint32_t. (do not put other types)
uint16_t (analogRead_mv(PIN_ANALOGUE:: VCC)) // A1 and VCC values (note: alalog read is valid after the first (Analogue.available() == true).)
uint32_t (millis()) // put timestamp here.
// do transmit
}
} ネットワークオブジェクトとパケットオブジェクトの取得
if (auto && pkt = the_twelite.network.use< NWK_SIMPLE> ().prepare_tx_packet()) { ネットワークオブジェクトをthe_twelite.network.use<NWK_SIMPLE>()で取得します。そのオブジェクトを用いて.prepare_tx_packet()によりpktオブジェクトを取得します。
ここではif文の条件判定式の中で宣言しています。宣言したpktオブジェクトはif節の終わりまで有効です。pktオブジェクトはbool型の応答をし、ここではTWENETの送信要求キューに空きがあって送信要求を受け付ける場合にtrue、空きがない場合にfalseとなります。
パケットの送信設定
pkt << tx_addr(addr) // 0..0xFF (LID 0:parent, FE:child w/ no id, FF:LID broad cast), 0x8XXXXXXX (long address)
<< tx_retry(0x3 ) // set retry (0x3 send four times in total)
<< tx_packet_delay(100 ,200 ,20 ); // send packet w/ delay (send first packet with randomized delay from 100 to 200ms, repeat every 20ms)
パケットの設定はthe_tweliteの初期化設定のように<<演算子を用いて行います。
tx_addr() パラメータに送信先アドレスを指定します。0x00なら自分が子機で親機宛に、0xFEなら自分が親機で任意の子機宛のブロードキャストという意味です。tx_retry() パラメータに再送回数を指定します。例の3は再送回数が3回、つまり合計4回パケットを送ります。無線パケット1回のみの送信では条件が良くても数%程度の失敗はあります。tx_packet_delay() 送信遅延を設定します。一つ目のパラメータは、送信開始までの最低待ち時間、2番目が最長の待ち時間です。この場合は送信要求を発行後におよそ100msから200msの間で送信を開始します。3番目が再送間隔です。最初のパケットが送信されてから20ms置きに再送を行うという意味です。パケットのデータペイロード ペイロードは積載物という意味ですが、無線パケットでは「送りたいデータ本体」という意味でよく使われます。無線パケットのデータにはデータ本体以外にもアドレス情報などいくつかの補助情報が含まれます。
送受信を正しく行うために、データペイロードのデータ並び順を意識するようにしてください。ここでは以下のようなデータ順とします。このデータ順に合わせてデータペイロードを構築します。
# 先頭バイトのインデックス: データ型 : バイト数 : 内容
00: uint8_t[4] : 4 : 4文字識別子
08: uint16_t : 2 : AI1のADC値 (0..1023)
06: uint16_t : 2 : Vccの電圧値 (2000..3600)
10: uint32_t : 4 : millis()システム時間
データペイロードには90バイト格納できます(実際にはあと数バイト格納できます)。
IEEE802.15.4の無線パケットの1バイトは貴重です。できるだけ節約して使用することを推奨します。1パケットで送信できるデータ量に限りがあります。パケットを分割する場合は分割パケットの送信失敗などを考慮する必要がありコストは大きくつきます。また1バイト余分に送信するのに、およそ16μ秒×送信時の電流に相当するエネルギーが消費され、特に電池駆動のアプリケーションには大きく影響します。
上記のデータペイロードのデータ構造を実際に構築してみます。データペイロードは pkt.get_payload() により simplbuf<uint8_t> 型のコンテナとして参照できます。このコンテナに上記の仕様に基づいてデータを構築します。
上記のように記述できますがMWXライブラリでは、データペイロード構築のための補助関数pack_bytes()を用意しています。
// prepare packet payload
// set payload data objects.
// string should be paired with length explicitly.
uint16_t (analogRead(PIN_ANALOGUE:: A1)) // possible numerical values types are uint8_t, uint16_t, uint32_t. (do not put other types)
uint16_t (analogRead_mv(PIN_ANALOGUE:: VCC)) // A1 and VCC values (note: alalog read is valid after the first (Analogue.available() == true).)
uint32_t (millis()) // put timestamp here.
pack_bytesの最初のパラメータはコンテナを指定します。この場合はpkt.get_payload()です。
そのあとのパラメータは可変数引数でpack_bytesで対応する型の値を必要な数だけ指定します。pack_bytesは内部で.push_back()メソッドを呼び出して末尾に指定した値を追記していきます。
3行目のmake_pair()は標準ライブラリの関数でstd::pairを生成します。文字列型の混乱(具体的にはペイロードの格納時にヌル文字を含めるか含めないか)を避けるための指定です。make_pair()の1番目のパラメータに文字列型(char*やuint8_t*型、uint8_t[]など)を指定します。2番目のパラメータはペイロードへの格納バイト数です。
4,5,6行目は、数値型の値 (uint8_t, uint16_t, uint32_t)を格納します。符号付などの数値型、char型など同じ数値型であっても左記の3つの型にキャストして投入します。
analogRead()とanalogRead_mv()は、ADCの結果を取得するものです。前者はADC値(0..1023)、後者は電圧(mV, 0..2470)となります。モジュールの電源電圧は内部的に分圧抵抗の値を読んでいるためその変換を行うadalogRead_mv()を利用しています。
これでパケットの準備は終わりです。最後に、送信要求を行います。
パケットを送信するにはpktオブジェクトのpkt.transmit()メソッドを用います。
このアクトでは使用しませんが、戻り値には、要求の成功失敗の情報と要求に対応する番号が格納されています。送信完了まで待つ処理を行う場合は、この戻り値の値を利用します。
on_rx_packet()受信パケットがある場合の処理です。
void on_rx_packet (packet_rx& rx, bool_t & handled) {
uint8_t msg[MSG_LEN];
uint16_t adcval, volt;
uint32_t timestamp;
// expand packet payload (shall match with sent packet data structure, see pack_bytes())
, msg // 4bytes of msg
// also can be -> std::make_pair(&msg[0], MSG_LEN)
// 2bytes, A1 value [0..1023]
// 2bytes, Module VCC[mV]
// 4bytes of timestamp
// if PING packet, respond pong!
if (! strncmp((const char * )msg, "PING" , MSG_LEN)) {
// transmit a PONG packet with specifying the address.
-> u32SrcAddr);
}
// display the packet
<< format("<RX ad=%x/lq=%d/ln=%d/sq=%d:" // note: up to 4 args!
-> u32SrcAddr
, rx.get_lqi()
, rx.get_length()
, rx.get_psRxDataApp()-> u8Seq
)
<< format(" %s AD=%d V=%d TS=%dms>" // note: up to 4 args!
, adcval
, volt
, timestamp
)
<< mwx:: crlf
<< mwx:: flush;
} まず受信パケットのデータはパラメータrxとして渡されます。rxから無線パケットのアドレス情報やデータペイロードにアクセスします。
while (the_twelite.receiver.available()) {
auto && rx = the_twelite.receiver.read(); 次の行では、受信パケットデータには、送信元のアドレス(32bitのロングアドレスと8bitの論理アドレス)などの情報を参照しています。
Serial << format("..receive(%08x/%d) : " ,
rx.get_addr_src_long(), rx.get_addr_src_lid());
<NWK_SIMPLE>では、8bitの論理IDと32bitのロングアドレスの2種類が常にやり取りされます。送り先を指定する場合はロングアドレスか論理アドレスのいずれかを指定します。受信時には両方のアドレスが含まれます。
MWXライブラリにはtransmit()のときに使ったpack_bytes()の対になる関数expand_bytes()が用意されています。
uint8_t msg[MSG_LEN];
uint16_t adcval, volt;
uint32_t timestamp;
// expand packet payload (shall match with sent packet data structure, see pack_bytes())
, msg // 4bytes of msg
// also can be -> std::make_pair(&msg[0], MSG_LEN)
// 2bytes, A1 value [0..1023]
// 2bytes, Module VCC[mV]
// 4bytes of timestamp
1行目から3行目までは、データを格納する変数を指定しています。
6行目でexpand_bytes()によりパケットのペイロードのデータを変数に格納します。1番目のパラメータでコンテナの先頭イテレータ(uint8_t*ポインタ)を指定します。.begin()メソッドにより取得できます。2番目のパラメータはコンテナの末尾の次を指すイテレータで.end()メソッドで取得できます。2番目はコンテナの末尾を超えた読み出しを行わないようにするためです。
3番目以降のパラメータに変数を列挙します。列挙した順番にペイロードの読み出しとデータ格納が行われます。
このアクトでは、パケット長が間違っていた場合などのエラーチェックを省いています。チェックを厳格にしたい場合は、expand_bytes()の戻り値により判定してください。
expand_bytes()の戻り値は uint8_t* ですが、末尾を超えたアクセスの場合はnullptr(ヌルポインタ)を戻します。
msgに読み出した4バイト文字列の識別子が"PING"の場合はPONGメッセージを送信する処理です。
if (! strncmp((const char * )msg, "PING" , MSG_LEN)) {
vTransmit(MSG_PONG, rx.get_psRxDataApp()-> u32SrcAddr);
} 続いて到着したパケット情報を表示します。
Serial << format("<RX ad=%x/lq=%d/ln=%d/sq=%d:" // note: up to 4 args!
-> u32SrcAddr
, rx.get_lqi()
, rx.get_length()
, rx.get_psRxDataApp()-> u8Seq
)
<< format(" %s AD=%d V=%d TS=%dms>" // note: up to 4 args!
, adcval
, volt
, timestamp
)
<< mwx:: crlf
<< mwx:: flush; 数値のフォーマット出力が必要になるのでformat()を用いています。>>演算子向けにprintf()と同じ構文を利用できるようにしたヘルパークラスですが、引数の数は最大8つまで(32bitパラメータの場合)に制限されています。(制限を超えるとコンパイルエラーが出ます。なおSerial.printfmt()には引数の数の制限がありません。)
mwx::crlfは改行文字(CRLF)を、mwx::flushは出力完了待ちを指定します(mwx::flushはSerial.flush()と記述しても構いません)。
1.4.1.6 - BRD_APPTWELITE デジタル・アナログ信号伝送
App_Twelite と同じ配線を想定したボードサポート <BRD_APPTWELITE> を用いたサンプルです。
このサンプルは App_Twelite と通信できません。
このアクトには以下が含まれます。
無線パケットの送受信 インタラクティブモードによる設定 - <STG_STD> ディジタル(ボタン)入力 - Buttons アナログ入力 - Analogue アクトの機能 M1を読み取り、親機か子機かを決めます。 DI1-DI4 の値を読み取ります。Buttons クラスにより、チャタリングの影響を小さくするため、連続で同じ値になったときにはじめて変化が通知されます。変化があったときには通信を行います。 AI1-AI4 の値を読み取ります。 DIの変化または1秒おきに、DI1-4, AI1-4, VCC の値を、自身が親機の場合は子機へ、子機の場合は親機宛に送信します。 受信したパケットの値に応じで DO1-4, PWM1-4 に設定します。 アクトの使い方 必要なTWELITEと配線例 役割 例 親機 TWELITE DIP最低限 M1=GND, DI1:ボタン, DO1:LEDの配線をしておく。 子機 TWELITE DIP最低限 M1=オープン, DI1:ボタン, DO1:LEDの配線をしておく。
配線例 (AI1-AI4は省略可)
アクトの解説 宣言部 インクルード
// use twelite mwx c++ template library
#include <TWELITE>
#include <NWK_SIMPLE>
#include <BRD_APPTWELITE>
#include <STG_STD> 全てのアクトで<TWELITE>をインクルードします。ここでは、シンプルネットワーク <NWK_SIMPLE> とボードサポート <BRD_APPTWELITE>をインクルードしておきます。
またインタラクティブモードを追加するために <STG_STD> をインクルードしています。
その他
/*** Config part */
// application ID
const uint32_t DEFAULT_APP_ID = 0x1234abcd ;
// channel
const uint8_t DEFAULT_CHANNEL = 13 ;
// option bits
uint32_t OPT_BITS = 0 ;
// logical id
uint8_t LID = 0 ;
/*** function prototype */
MWX_APIRET transmit ();
void receive ();
/*** application defs */
const char APP_FOURCHAR[] = "BAT1" ;
// sensor values
uint16_t au16AI[5 ];
uint8_t u8DI_BM; サンプルアクト共通宣言 長めの処理を関数化しているため、そのプロトタイプ宣言(送信と受信) アプリケーション中のデータ保持するための変数 setup()
void setup () {
/*** SETUP section */
// init vars
for (auto && x : au16AI) x = 0xFFFF ;
u8DI_BM = 0xFF ;
// load board and settings
auto && set = the_twelite.settings.use< STG_STD> ();
auto && brd = the_twelite.board.use< BRD_APPTWELITE> ();
auto && nwk = the_twelite.network.use< NWK_SIMPLE> ();
// settings: configure items
<< SETTINGS:: appname("BRD_APPTWELITE" );
set << SETTINGS:: appid_default(DEFAULT_APP_ID); // set default appID
<< SETTINGS:: ch_default(DEFAULT_CHANNEL); // set default channel
:: OPT_DWORD2, E_STGSTD_SETID:: OPT_DWORD3, E_STGSTD_SETID:: OPT_DWORD4, E_STGSTD_SETID:: ENC_KEY_STRING, E_STGSTD_SETID:: ENC_MODE);
set.reload(); // load from EEPROM.
= set.u32opt1(); // this value is not used in this example.
= set.u8devid(); // logical ID
// the twelite main class
<< set // apply settings (appid, ch, power)
<< TWENET:: rx_when_idle(); // open receive circuit (if not set, it can't listen packts from others)
if (brd.get_M1()) { LID = 0 ; }
// Register Network
<< set // apply settings (LID and retry)
// if M1 pin is set, force parent device (LID=0)
<< NWK_SIMPLE:: logical_id(LID); // write logical id again.
/*** BEGIN section */
// start ADC capture
:: KICK_BY_TIMER0); // setup analogue read (check every 16ms)
BRD_APPTWELITE:: PIN_AI1,
BRD_APPTWELITE:: PIN_AI2,
BRD_APPTWELITE:: PIN_AI3,
BRD_APPTWELITE:: PIN_AI4,
PIN_ANALOGUE:: VCC)); // _start continuous adc capture.
// Timer setup
32 , true); // 32hz timer
// start button check
5 ); // init button manager with 5 history table.
BRD_APPTWELITE:: PIN_DI1,
BRD_APPTWELITE:: PIN_DI2,
BRD_APPTWELITE:: PIN_DI3,
BRD_APPTWELITE:: PIN_DI4),
5 , // history count
4 ); // tick delta (change is detected by 5*4=20ms consequtive same values)
the_twelite.begin(); // start twelite!
/*** INIT message */
Serial << "--- BRD_APPTWELITE ---" << mwx:: crlf;
Serial << format("-- app:x%08x/ch:%d/lid:%d"
, the_twelite.get_appid()
, the_twelite.get_channel()
, nwk.get_config().u8Lid
)
<< mwx:: crlf;
Serial << format("-- pw:%d/retry:%d/opt:x%08x"
, the_twelite.get_tx_power()
, nwk.get_config().u8RetryDefault
, OPT_BITS
)
<< mwx:: crlf;
} 大まかな流れは、各部の初期設定、各部の開始となっています。
各種ビヘイビアオブジェクトの登録
auto && set = the_twelite.settings.use< STG_STD> ();
auto && brd = the_twelite.board.use< BRD_APPTWELITE> ();
auto && nwk = the_twelite.network.use< NWK_SIMPLE> (); システムの振る舞いを決めるためのビヘイビアオブジェクトを登録します。インタラクティブモードの設定管理で合ったり、ボードサポート、また無線パケットのネットワーク記述です。
インタラクティブモードの設定
// インタラクティブモードの初期化
auto && set = the_twelite.settings.use< STG_STD> ();
set << SETTINGS:: appname("BRD_APPTWELITE" );
set << SETTINGS:: appid_default(DEFAULT_APP_ID); // set default appID
<< SETTINGS:: ch_default(DEFAULT_CHANNEL); // set default channel
:: OPT_DWORD2, E_STGSTD_SETID:: OPT_DWORD3, E_STGSTD_SETID:: OPT_DWORD4, E_STGSTD_SETID:: ENC_KEY_STRING, E_STGSTD_SETID:: ENC_MODE);
set.reload(); // load from EEPROM.
= set.u32opt1(); // this value is not used in this example.
= set.u8devid(); // logical ID;
インタラクティブモードの初期化を行います。まずsetオブジェクトを取得しています。続いて以下の処理を行っています。
アプリケーション名を"BRD_APPTWELITE"に設定(メニューで利用される) デフォルトのアプリケーションIDとチャネル値を書き換える 不要な項目を削除する set.reload()により保存された設定値を読み出すOPT_BITSとLIDの値を変数にコピーする
読み出したインタラクティブモードの設定の反映については後述します。
以下は画面例です。+ + + と + を3回、0.2 秒から 1 秒の間をあけて入力するとインタラクティブモード画面を出すことが出来ます。
[CONFIG/BRD_APPTWELITE:0/SID=8XXYYYYY]
a: (0x1234ABCD) Application ID [HEX:32bit]
i: ( 13) Device ID [1-100,etc]
c: ( 13) Channel [11-26]
x: ( 0x03) RF Power/Retry [HEX:8bit]
o: (0x00000000) Option Bits [HEX:32bit]
[ESC]:Back [!]:Reset System [M]:Extr Menu
Option Bits をメニューに表示していますが、このサンプルでは使用していません。
the_tweliteこのオブジェクトはTWENETの中核としてふるまいます。
auto && brd = the_twelite.board.use< BRD_APPTWELITE> (); ボードの登録(このアクトでは<BRD_APPTWELITE>を登録しています)。以下のように use の後に <> で登録したいボードの名前を指定します。
ユニバーサル参照(auto&&)にて得られた戻り値として、参照型でのボードオブジェクトが得られます。このオブジェクトにはボード特有の操作や定義が含まれます。以下ではボードオブジェクトを用い、M1ピンの状態を確認しています。M1ピンがLOWであれば、LID=0、つまり親機アドレスと設定します。
if (brd.get_M1()) { LID = 0 ; } the_twelite を動作させるには初期設定が必要です。アプリケーションIDや無線チャネルの設定は必須といえます。
// the twelite main class
<< set
<< TWENET:: rx_when_idle(); // open receive circuit (if not set, it can't listen packts from others)
the_twelite に設定を反映するには << を用います。
setはインタラクティブモードから読み出した設定の一部(アプリケーションIDや無線チャネルなど)反映させます。反映される項目は<STG_STD>の解説を参照してください。TWENET::rx_when_idle() 受信回路をオープンにする指定です。
<<, >>演算子はC言語におけるビットシフト演算子ですが、ここではその意味合いとは異なる挿入演算子(stream insertion operator)として使用しています。MWXライブラリでは、C++標準ライブラリの入出力利用にならって上記のような設定やシリアルポートの入出力等で利用します。
ただし、以下の記述は MWX ライブラリでは利用できません。
#include <iostream>
:: cout << "hello world" << std:: endl; 次にネットワークを登録します。
auto && nwk = the_twelite.network.use< NWK_SIMPLE> ();
nwk << set;
nwk << NWK_SIMPLE:: logical_id(LID); 1行目は、ボードの登録と同じ書き方で <> には <NWK_SIMPLE>を指定します。
2,3行目は、<NWK_SIMPLE>の設定です。先にインタラクティブモードの設定値を反映させます。反映される項目はLIDと再送回数です。このアプリケーションではM1ピンの状態によってLID=0にする場合があるため、3行目で再度LIDを設定しています。
AnalogueADC(アナログディジタルコンバータ)を取り扱うクラスオブジェクトです。
Analogue.setup(true, ANALOGUE:: KICK_BY_TIMER0); 初期化Analogue.setup()で行います。パラメータのtrueはADC回路の安定までその場で待つ指定です。2番目のパラメータは、ADCの開始をTimer0に同期して行う指定です。
Analogue.begin(pack_bits(
BRD_APPTWELITE:: PIN_AI1,
BRD_APPTWELITE:: PIN_AI2,
BRD_APPTWELITE:: PIN_AI3,
BRD_APPTWELITE:: PIN_AI4,
PIN_ANALOGUE:: VCC)); ADCを開始するにはAnalogue.begin()を呼びます。パラメータはADC対象のピンに対応するビットマップです。
ビットマップを指定するのにpack_bits()関数を用います。可変数引数の関数で、各引数には1を設定するビット位置を指定します。例えばpack_bits(1,3,5)なら2進数で 101010の値が戻ります。この関数はconstexpr指定があるため、パラメータが定数のみであれば定数に展開されます。
パラメータと指定されるBRD_APPTWELITE::にはPIN_AI1..4が定義されています。App_Tweliteで用いるAI1..AI4に対応します。AI1=ADC1, AI2=DIO0, AI3=ADC2, AI4=DIO2 と割り当てられています。PIN_ANALOGUE::にはADCで利用できるピンの一覧が定義されています。
初回を除き ADC の開始は、割り込みハンドラ内で行います。
DIO (ディジタル入力) の値の変化を検出します。Buttonsでは、メカ式のボタンのチャタリング(摺動)の影響を軽減するため、一定回数同じ値が検出されてから、値の変化とします。
初期化は Buttons.setup()で行います。パラメータの 5 は、値の確定に必要な検出回数ですが、設定可能な最大値を指定します。内部的にはこの数値をもとに内部メモリの確保を行っています。
Buttons.begin(pack_bits(
BRD_APPTWELITE:: PIN_DI1,
BRD_APPTWELITE:: PIN_DI2,
BRD_APPTWELITE:: PIN_DI3,
BRD_APPTWELITE:: PIN_DI4),
5 , // history count
4 ); // tick delta
開始は Buttons.begin() で行います。1番目のパラメータは検出対象のDIOです。BRD_APPTWELITE::に定義されるPIN_DI1-4 (DI1-DI4) を指定しています。2番めのパラメータは状態を確定するのに必要な検出回数です。3番めのパラメータは検出間隔です。4を指定しているので4msごとに5回連続で同じ値が検出できた時点で、HIGH, LOWの状態が確定します。
ButtonsでのDIO状態の検出はイベントハンドラで行います。イベントハンドラは、割り込み発生後にアプリケーションループで呼ばれるため割り込みハンドラに比べ遅延が発生します。
Timer0
Timer0.begin(32 , true); // 32hz timer
App_Twelite ではアプリケーションの制御をタイマー起点で行っているため、このアクトでも同じようにタイマー割り込み・イベントを動作させます。もちろん1msごとに動作しているシステムのTickTimerを用いても構いません。
上記の例の1番目のパラメータはタイマーの周波数で32Hzを指定しています。2番目のパラメータをtrueにするとソフトウェア割り込みが有効になります。
Timer0.begin()を呼び出したあと、タイマーが稼働します。
the_tweliteの動作開始
the_twelite.begin(); // start twelite!
setup() 関数の末尾で the_twelite.begin() を実行しています。
SerialSerial オブジェクトは、初期化や開始手続きなく利用できます。
Serial << "--- BRD_APPTWELITE ---" << mwx:: crlf;
Serial << format("-- app:x%08x/ch:%d/lid:%d"
, the_twelite.get_appid()
, the_twelite.get_channel()
, nwk.get_config().u8Lid
)
<< mwx:: crlf;
Serial << format("-- pw:%d/retry:%d/opt:x%08x"
, the_twelite.get_tx_power()
, nwk.get_config().u8RetryDefault
, OPT_BITS
)
<< mwx:: crlf; このサンプルでは始動時のメッセージとしていくつかのシステム設定値を表示しています。Serialオブジェクトには const char* 型の文字列や、int型(他の整数型はNG)、printf()とほぼ同じ振る舞いをするformat()、改行文字を出力するcrlfなどを<<演算子に与えます。
サンプル中では名前空間mwx::を省略している場合もあります。上記ではmwx::crlfと記載していますがcrlfと記載しても構いません。mwx::名前空間は、一部を省略可能とするように設計しています。
loop()ループ関数は TWENET ライブラリのメインループからコールバック関数として呼び出されます。ここでは、利用するオブジェクトが available になるのを待って、その処理を行うのが基本的な記述です。ここではアクトで使用されているいくつかのオブジェクトの利用について解説します。
TWENET ライブラリのメインループは、事前にFIFOキューに格納された受信パケットや割り込み情報などをイベントとして処理し、そののちloop()が呼び出されます。loop()を抜けた後は CPU が DOZE モードに入り、低消費電流で新たな割り込みが発生するまでは待機します。
したがってCPUが常に稼働していることを前提としたコードはうまく動作しません。
/*** loop procedure (called every event) */
void loop () {
if (Buttons.available()) {
uint32_t bp, bc;
Buttons.read(bp, bc);
u8DI_BM = uint8_t (collect_bits(bp,
BRD_APPTWELITE:: PIN_DI4, // bit3
:: PIN_DI3, // bit2
:: PIN_DI2, // bit1
:: PIN_DI1)); // bit0
transmit();
}
if (Analogue.available()) {
au16AI[0 ] = Analogue.read(PIN_ANALOGUE:: VCC);
au16AI[1 ] = Analogue.read_raw(BRD_APPTWELITE:: PIN_AI1);
au16AI[2 ] = Analogue.read_raw(BRD_APPTWELITE:: PIN_AI2);
au16AI[3 ] = Analogue.read_raw(BRD_APPTWELITE:: PIN_AI3);
au16AI[4 ] = Analogue.read_raw(BRD_APPTWELITE:: PIN_AI4);
}
if (Timer0.available()) {
static uint8_t u16ct;
u16ct++ ;
if (u8DI_BM != 0xFF && au16AI[0 ] != 0xFFFF ) { // finished the first capture
if ((u16ct % 32 ) == 0 ) { // every 32ticks of Timer0
}
}
}
} DIO(ディジタルIO)の入力変化を検出したタイミングで available になり、Buttons.read()により読み出します。
if (Buttons.available()) {
uint32_t bp, bc;
Buttons.read(bp, bc); 1番目のパラメータは、現在のDIOのHIGH/LOWのビットマップで、bit0から順番にDIO0,1,2,.. と並びます。例えば DIO12 であれば bp & (1UL << 12) を評価すれば HIGH / LOW が判定できます。ビットが1になっているものがHIGHになります。
初回のIO状態確定時は MSB (bit31) に1がセットされます。スリープ復帰時も初回の確定処理を行います。
次にビットマップから値を取り出してu8DI_BMに格納しています。ここではMWXライブラリで用意したcollect_bits()関数を用いています。
u8DI_BM = uint8_t (collect_bits(bp,
BRD_APPTWELITE:: PIN_DI4, // bit3
:: PIN_DI3, // bit2
:: PIN_DI2, // bit1
:: PIN_DI1)); // bit0
/* collect_bits は以下の処理を行います。
u8DI_BM = 0;
if (bp & (1UL << BRD_APPTWELITE::PIN_DI1)) u8DI_BM |= 1;
if (bp & (1UL << BRD_APPTWELITE::PIN_DI2)) u8DI_BM |= 2;
if (bp & (1UL << BRD_APPTWELITE::PIN_DI3)) u8DI_BM |= 4;
if (bp & (1UL << BRD_APPTWELITE::PIN_DI4)) u8DI_BM |= 8;
*/ collect_bits() は、上述のpack_bits()と同様のビット位置の整数値を引数とします。可変数引数の関数で、必要な数だけパラメータを並べます。上記の処理では bit0 は DI1、bit1 は DI2、bit2 は DI3、bit3 は DI4の値としてu8DI_BMに格納しています。
App_Twelite では、DI1から4に変化があった場合に無線送信しますので、Buttons.available()を起点に送信処理を行います。transmit()処理の内容は後述します。
AnalogueADCのアナログディジタル変換が終了した直後のloop()で available になります。次の ADC が開始するまでは、データは直前に取得されたものとして読み出すことが出来ます。
ADCのアナログディジタル変換が終了した直後のloop()で available になります。次の ADC が開始するまでは、データは直前に取得されたものとして読み出すことが出来ます。 ADC値を読むには Analogue.read() または Analogue.read_raw() メソッドを用います。read()はmVに変換した値、read_raw()は 0..1023 のADC値となります。パラメータにはADCのピン番号を指定します。ADCのピン番号はPIN_ANALOGUE::やBRD_APPTWELITE::に定義されているので、こちらを利用しています。
周期的に実行されるADCの値は、タイミングによってはavailable通知前のより新しい値が読み出されることがあります。
このアクトでは32Hzと比較的ゆっくりの周期で処理しているため、available判定直後に処理すれば問題にはなりませんが、変換周期が短い場合、loop()中で比較的長い時間のかかる処理をしている場合は注意が必要です。
Analogueには、変換終了後に割り込みハンドラ内から呼び出されるコールバック関数を指定することが出来ます。例えば、このコールバック関数からFIFOキューに値を格納する処理を行い、アプリケーションループ内ではキューの値を逐次読み出すといった非同期処理を行います。
Timer0Timer0は32Hzで動作しています。タイマー割り込みが発生直後の loop() で available になります。つまり、秒32回の処理をします。ここでは、ちょうど1秒になったところで送信処理をしています。
if (Timer0.available()) {
static uint8_t u16ct;
u16ct++ ;
if (u8DI_BM != 0xFF && au16AI[0 ] != 0xFFFF ) { // finished the first capture
if ((u16ct % 32 ) == 0 ) { // every 32ticks of Timer0
}
}
} AppTweliteでは約1秒おきに定期送信を行っています。Timer0がavailableになったときにu16ctをインクリメントします。このカウンタ値をもとに、32回カウントが終わればtransmit()を呼び出し無線パケットを送信しています。
u8DI_BMとau16AI[]の値判定は、初期化直後かどうかの判定です。まだDI1..DI4やAI1..AI4の値が格納されていない場合は何もしません。
transmit()無線パケットの送信要求をTWENETに行う関数です。本関数が終了した時点では、まだ無線パケットの処理は行われません。実際に送信が完了するのは、送信パラメータ次第ですが、数ms後以降になります。ここでは代表的な送信要求方法について解説します。
MWX_APIRET transmit () {
if (auto && pkt = the_twelite.network.use< NWK_SIMPLE> ().prepare_tx_packet()) {
auto && set = the_twelite.settings.use< STG_STD> ();
if (! set.is_screen_opened()) {
Serial << "..DI=" << format("%04b " , u8DI_BM);
Serial << format("ADC=%04d/%04d/%04d/%04d " , au16AI[1 ], au16AI[2 ], au16AI[3 ], au16AI[4 ]);
Serial << "Vcc=" << format("%04d " , au16AI[0 ]);
Serial << " --> transmit" << mwx:: crlf;
}
// set tx packet behavior
<< tx_addr(u8devid == 0 ? 0xFE : 0x00 ) // 0..0xFF (LID 0:parent, FE:child w/ no id, FF:LID broad cast), 0x8XXXXXXX (long address)
<< tx_retry(0x1 ) // set retry (0x1 send two times in total)
<< tx_packet_delay(0 ,50 ,10 ); // send packet w/ delay (send first packet with randomized delay from 100 to 200ms, repeat every 20ms)
// prepare packet payload
// set payload data objects.
4 ) // string should be paired with length explicitly.
uint8_t (u8DI_BM)
);
for (auto && x : au16AI) {
pack_bytes(pkt.get_payload(), uint16_t (x)); // adc values
// do transmit
return pkt.transmit();
}
return MWX_APIRET(false, 0 );
} 関数プロトタイプ
MWX_APIRETはuint32_t型のデータメンバを持つ戻り値を取り扱うクラスです。MSB(bit31)が成功失敗、それ以外が戻り値として利用するものです。
ネットワークオブジェクトとパケットオブジェクトの取得
if (auto && pkt = the_twelite.network.use< NWK_SIMPLE> ().prepare_tx_packet()) { ネットワークオブジェクトをthe_twelite.network.use<NWK_SIMPLE>()で取得します。そのオブジェクトを用いて.prepare_tx_packet()によりpktオブジェクトを取得します。
ここではif文の条件判定式の中で宣言しています。宣言したpktオブジェクトはif節の終わりまで有効です。pktオブジェクトはbool型の応答をし、ここではTWENETの送信要求キューに空きがあって送信要求を受け付ける場合にtrue、空きがない場合にfalseとなります。
インタラクティブモード画面表示中の表示抑制
auto && set = the_twelite.settings.use< STG_STD> ();
if (! set.is_screen_opened()) {
//インタラクティブモード画面中ではない!
インタラクティブモードの画面が表示されているときは、画面出力を抑制します。
パケットの送信設定
pkt << tx_addr(u8devid == 0 ? 0xFE : 0x00 ) // 0..0xFF (LID 0:parent, FE:child w/ no id, FF:LID broad cast), 0x8XXXXXXX (long address)
<< tx_retry(0x1 ) // set retry (0x3 send four times in total)
<< tx_packet_delay(0 ,50 ,10 ); // send packet w/ delay (send first packet with randomized delay from 100 to 200ms, repeat every 20ms)
パケットの設定はthe_tweliteの初期化設定のように<<演算子を用いて行います。
tx_addr() パラメータに送信先アドレスを指定します。0x00なら自分が子機で親機宛に、0xFEなら自分が親機で任意の子機宛のブロードキャストという意味です。tx_retry() パラメータに再送回数を指定します。例の1は再送回数が1回、つまり合計2回パケットを送ります。無線パケット1回のみの送信では条件が良くても数%程度の失敗はあります。tx_packet_delay() 送信遅延を設定します。一つ目のパラメータは、送信開始までの最低待ち時間、2番目が最長の待ち時間です。この場合は送信要求を発行後におよそ0msから50msの間で送信を開始します。3番目が再送間隔です。最初のパケットが送信されてから10ms置きに再送を行うという意味です。パケットのデータペイロード ペイロードは積載物という意味ですが、無線パケットでは「送りたいデータ本体」という意味でよく使われます。無線パケットのデータにはデータ本体以外にもアドレス情報などいくつかの補助情報が含まれます。
送受信を正しく行うために、データペイロードのデータ並び順を意識するようにしてください。ここでは以下のようなデータ順とします。このデータ順に合わせてデータペイロードを構築します。
# 先頭バイトのインデックス: データ型 : バイト数 : 内容
00: uint8_t[4] : 4 : 4文字識別子
04: uint8_t : 1 : DI1..4のビットマップ
06: uint16_t : 2 : Vccの電圧値
08: uint16_t : 2 : AI1のADC値 (0..1023)
10: uint16_t : 2 : AI2のADC値 (0..1023)
12: uint16_t : 2 : AI3のADC値 (0..1023)
14: uint16_t : 2 : AI4のADC値 (0..1023)
データペイロードには90バイト格納できます(実際にはあと数バイト格納できます)。
IEEE802.15.4の無線パケットの1バイトは貴重です。できるだけ節約して使用することを推奨します。1パケットで送信できるデータ量に限りがあります。パケットを分割する場合は分割パケットの送信失敗などを考慮する必要がありコストは大きくつきます。また1バイト余分に送信するのに、およそ16μ秒×送信時の電流に相当するエネルギーが消費され、特に電池駆動のアプリケーションには大きく影響します。
上記の例は、解説のためある程度の妥協をしています。節約を考える場合 00: の識別子は1バイトの簡単なものにすべきですし、VCCの電圧値は8ビットに丸めてもかまわないでしょう。また各AI1..AI4の値は10bitで、合計40bit=5バイトに対して6バイト使用しています。
上記のデータペイロードのデータ構造を実際に構築してみます。データペイロードは pkt.get_payload() により simplbuf<uint8_t> 型のコンテナとして参照できます。このコンテナに上記の仕様に基づいてデータを構築します。
auto && payl = pkt.get_payload();
payl.reserve(16 ); // 16バイトにリサイズ
00 ] = APP_FOURCHAR[0 ];
payl[01 ] = APP_FOURCHAR[1 ];
...
payl[08 ] = (au16AI[0 ] & 0xFF00 ) >> 8 ; //Vcc
09 ] = (au16AI[0 ] & 0xFF );
...
payl[14 ] = (au16AI[4 ] & 0xFF00 ) >> 8 ; // AI4
15 ] = (au16AI[4 ] & 0xFF ); 上記のように記述できますがMWXライブラリでは、データペイロード構築のための補助関数pack_bytes()を用意しています。
// prepare packet payload
// set payload data objects.
4 ) // string should be paired with length explicitly.
uint8_t (u8DI_BM)
);
for (auto && x : au16AI) {
pack_bytes(pkt.get_payload(), uint16_t (x)); // adc values
pack_bytes()の最初のパラメータはコンテナを指定します。この場合はpkt.get_payload()です。
そのあとのパラメータは可変数引数でpack_bytes()で対応する型の値を必要な数だけ指定します。pack_bytes()は内部で.push_back()メソッドを呼び出して末尾に指定した値を追記していきます。
3行目のmake_pair()は標準ライブラリの関数でstd::pairを生成します。文字列型の混乱(具体的にはペイロードの格納時にヌル文字を含めるか含めないか)を避けるための指定です。make_pair()の1番目のパラメータに文字列型(char*やuint8_t*型、uint8_t[]など)を指定します。2番目のパラメータはペイロードへの格納バイト数です。
4行目はuint8_t型でDI1..DI4のビットマップを書き込みます。
7-9行目ではau16AI配列の値を順に書き込んでいます。この値はuint16_t型で2バイトですが、ビッグエンディアンの並びで書き込みます。
7行目のfor文はC++で導入された範囲for 文です。サイズのわかっている配列やbegin(), end()によるイテレータによるアクセスが可能なコンテナクラスなどは、この構文が使用できます。au16AIの型もコンパイル時に判定できるため auto&& (ユニバーサル参照)で型の指定も省略してます。
通常のfor文に書き換えると以下のようになります。
for (int i = 0 ; i < sizeof (au16AI)/ sizeof (uint16_t )); i++ ) {
pack_bytes(pkt.get_payload(), au16AI[i]);
} これでパケットの準備は終わりです。あとは、送信要求を行います。
パケットを送信するにはpktオブジェクトのpkt.transmit()メソッドを用います。戻り値としてMWX_APIRET型を返していますが、このアクトでは使っていません。
戻り値には、要求の成功失敗の情報と要求に対応する番号が格納されています。送信完了まで待つ処理を行う場合は、この戻り値の値を利用します。
on_rx_packet()無線パケットが受信できたときは、受信イベントとしてon_rx_packet()が呼び出されます。
the_twelite.receiverによる手続きでは一旦受信パケットを内部キュー(2パケットまで格納)に格納してからの処理でしたが、on_rx_packet()ではTWENETライブラリからのコールバックから直接呼び出され、より取りこぼし等が発生しにくい手続きです。ただしloop()文中で長時間処理を止めてしまうような記述を行うと、同じように取りこぼしの原因となります。
ここでは、相手方から伝えられたDI1..DI4の値とAI1..AI4の値を、自身のDO1..DO4とPWM1..PWM4に設定します。
void on_rx_packet (packet_rx& rx, bool_t & handled) {
auto && set = the_twelite.settings.use< STG_STD> ();
Serial << format("..receive(%08x/%d) : " , rx.get_addr_src_long(), rx.get_addr_src_lid());
// expand the packet payload
char fourchars[5 ]{};
auto && np = expand_bytes(rx.get_payload().begin(), rx.get_payload().end()
, make_pair((uint8_t * )fourchars, 4 ) // 4bytes of msg
// check header
if (strncmp(APP_FOURCHAR, fourchars, 4 )) { return ; }
// read rest of payload
uint8_t u8DI_BM_remote = 0xff ;
uint16_t au16AI_remote[5 ];
expand_bytes(np, rx.get_payload().end()
, u8DI_BM_remote
, au16AI_remote[0 ]
, au16AI_remote[1 ]
, au16AI_remote[2 ]
, au16AI_remote[3 ]
, au16AI_remote[4 ]
);
Serial << format("DI:%04b" , u8DI_BM_remote & 0x0F );
for (auto && x : au16AI_remote) {
Serial << format("/%04d" , x);
}
Serial << mwx:: crlf;
// set local DO
:: PIN_DO1, (u8DI_BM_remote & 1 ) ? HIGH : LOW);
digitalWrite(BRD_APPTWELITE:: PIN_DO2, (u8DI_BM_remote & 2 ) ? HIGH : LOW);
digitalWrite(BRD_APPTWELITE:: PIN_DO3, (u8DI_BM_remote & 4 ) ? HIGH : LOW);
digitalWrite(BRD_APPTWELITE:: PIN_DO4, (u8DI_BM_remote & 8 ) ? HIGH : LOW);
// set local PWM : duty is set 0..1024, so 1023 is set 1024.
1 ] == 1023 ? 1024 : au16AI_remote[1 ]);
Timer2.change_duty(au16AI_remote[2 ] == 1023 ? 1024 : au16AI_remote[2 ]);
Timer3.change_duty(au16AI_remote[3 ] == 1023 ? 1024 : au16AI_remote[3 ]);
Timer4.change_duty(au16AI_remote[4 ] == 1023 ? 1024 : au16AI_remote[4 ]);
} 関数プロトタイプ
void on_rx_packet(packet_rx& rx, bool_t & handled) 受信パケットのデータrxをパラメータとして渡されます。rxから無線パケットのアドレス情報やデータペイロードにアクセスします。パラメータhandledは通常利用しません。
送信元アドレスの表示
if (! set.is_screen_opened()) {
Serial << format("..receive(%08x/%d) : " ,
rx.get_addr_src_long(), rx.get_addr_src_lid());
} 受信パケットデータには、送信元のアドレス(32bitのロングアドレスと8bitの論理アドレス)などの情報を参照しています。インタラクティブモード画面が表示されているときは出力を抑制します。
<NWK_SIMPLE>では、8bitの論理IDと32bitのロングアドレスの2種類が常にやり取りされます。送り先を指定する場合はロングアドレスか論理アドレスのいずれかを指定します。受信時には両方のアドレスが含まれます。
パケットの識別 MWXライブラリにはtransmit()の時に使ったpack_bytes()の対になる関数expand_bytes()が用意されています。
char fourchars[5 ]{};
auto && np = expand_bytes(rx.get_payload().begin(), rx.get_payload().end()
, make_pair((uint8_t * )fourchars, 4 ) // 4bytes of msg
1行目ではデータ格納のためのchar型の配列を宣言しています。サイズが5バイトなのは末尾にヌル文字を含め、文字出力などでの利便性を挙げるためです。末尾の{}は初期化の指定で、5バイト目を0にすれば良いのですが、ここでは配列全体をデフォルトの方法で初期化、つまり0にしています。
2行目でexpand_bytes()により4バイト文字列を取り出しています。パラメータにコンテナ型を指定しない理由は、この続きを読み出すための読み出し位置を把握する必要があるためです。1番目のパラメータでコンテナの先頭イテレータ(uint8_t*ポインタ)を指定します。.begin()メソッドにより取得できます。2番目のパラメータはコンテナの末尾の次を指すイテレータで.end()メソッドで取得できます。2番目はコンテナの末尾を超えた読み出しを行わないようにするためです。
3番目に読み出す変数を指定しますが、ここでもmake_pair()によって文字列配列とサイズのペアを指定します。
このアクトでは、パケット長が間違っていた場合などのエラーチェックを省いています。チェックを厳格にしたい場合は、expand_bytes()の戻り値により判定してください。
expand_bytes()の戻り値は uint8_t* ですが、末尾を超えたアクセスの場合はnullptr(ヌルポインタ)を戻します。
読み出した4バイト文字列の識別子が、このアクトで指定した識別子と異なる場合は、このパケットを処理しません。
if (strncmp(APP_FOURCHAR, fourchars, 4 )) { return ; }
TWENETではアプリケーションIDと物理的な無線チャネルが合致する場合は、どのアプリケーションもたとえ種別が違ったとしても、受信することが出来ます。他のアプリケーションで作成したパケットを意図しない形で受信しない目的で、このような識別子やデータペイロードの構造などのチェックを行い、偶然の一致が起きないように対処することを推奨します。
シンプルネットワーク<NWK_SIMPLE>でのパケット構造の要件も満足する必要があるため、シンプルネットワークを使用しない他のアプリケーションが同じ構造のパケットを定義しない限り(非常にまれと思われます)、パケットの混在受信は発生しません。
データペイロードの取得 DI1..DI4の値とAI1..AI4の値を別の変数に格納します。
// read rest of payload
uint8_t u8DI_BM_remote = 0xff ;
uint16_t au16AI_remote[5 ];
expand_bytes(np, rx.get_payload().end()
, u8DI_BM_remote
, au16AI_remote[0 ]
, au16AI_remote[1 ]
, au16AI_remote[2 ]
, au16AI_remote[3 ]
, au16AI_remote[4 ]
); 先ほどのexpand_bytes()の戻り値npを1番目のパラメータにしています。先に読み取った4バイト文字列識別子の次から読み出す指定です。2番目のパラメータは同様です。
3番目以降のパラメータはデータペイロードの並びに一致した型の変数を、送り側のデータ構造と同じ順番で並べています。この処理が終われば、指定した変数にペイロードから読み出した値が格納されます。
取得したデータの表示 確認のためシリアルポートへ出力します。インタラクティブモード画面が表示されているときは出力は抑制します。
auto && set = the_twelite.settings.use< STG_STD> ();
...
Serial << format("DI:%04b" , u8DI_BM_remote & 0x0F );
for (auto && x : au16AI_remote) {
Serial << format("/%04d" , x);
}
Serial << mwx:: crlf; 数値のフォーマット出力が必要になるのでformat()を用いています。>>演算子向けにprintf()と同じ構文を利用できるようにしたヘルパークラスですが、引数の数が4つまでに制限されています。(Serial.printfmt()には引数の数の制限がありません。)
3行目の "DI:%04b" は"DI:0010"のようにDI1..DI4のビットマップを4桁で表示します。
5行目の"/%04d"は"/3280/0010/0512/1023/1023"のように Vcc/AI1..AI4の値を順に整数で出力します。
7行目のmwx::crlfは改行文字列を出力します。
信号の出力 これで必要なデータの展開が終わったので、あとはボード上のDO1..DO4とPWM1..PWM4の値を変更します。
// set local DO
:: PIN_DO1, (u8DI_BM_remote & 1 ) ? HIGH : LOW);
digitalWrite(BRD_APPTWELITE:: PIN_DO2, (u8DI_BM_remote & 2 ) ? HIGH : LOW);
digitalWrite(BRD_APPTWELITE:: PIN_DO3, (u8DI_BM_remote & 4 ) ? HIGH : LOW);
digitalWrite(BRD_APPTWELITE:: PIN_DO4, (u8DI_BM_remote & 8 ) ? HIGH : LOW);
// set local PWM : duty is set 0..1024, so 1023 is set 1024.
1 ] == 1023 ? 1024 : au16AI_remote[1 ]);
Timer2.change_duty(au16AI_remote[2 ] == 1023 ? 1024 : au16AI_remote[2 ]);
Timer3.change_duty(au16AI_remote[3 ] == 1023 ? 1024 : au16AI_remote[3 ]);
Timer4.change_duty(au16AI_remote[4 ] == 1023 ? 1024 : au16AI_remote[4 ]); digitalWrite()はディジタル出力の値を変更します。1番目のパラメータはピン番号で、2番目はHIGH(VCCレベル)かLOW(GNDレベル)を指定します。
Timer?.change_duty()はPWM出力のデューティ比を変更します。パラメータにデューティ比 0..1024 を指定します。最大値が1023でないことに注意してください。ライブラリ内で実行される割り算のコストが大きいため、2のべき乗である1024を最大値としています。0にするとGNDレベル、1024にするとVCCレベル相当の出力になります。
1.4.1.7 - BRD_I2C_TEMPHUMID I2Cセンサーデバイスによるデータ送信
I2C センサーデバイスを用いて、定期起床からの計測および送信を行うサンプルです。
このサンプルでは、当社の 環境センサーパル AMBIENT SENSE PAL あるいは TWELITE ARIA BLUE / RED に搭載の I2C センサーデバイスを利用しています。しかし、I2Cコマンド送受信部分を書き換えることで、その他の一般的な I2C センサーデバイス(図中 Generic I2C Sensor Module) を利用することもできます。その場合には、以下のように配線してください。
一般的なI2Cデバイスの接続
このアクトには以下が含まれます。
無線パケットの送受信 インタラクティブモードによる設定 - <STG_STD> ステートマシンによる状態遷移制御 - <SM_SIMPLE> アクトの機能 I2C デバイスのコマンド送受信を行います。 コイン電池で動作させるための、スリープ機能を利用します。 アクトの使い方 必要なTWELITE アクトの解説 インクルード
#include <TWELITE>
#include <NWK_SIMPLE> // ネットワークサポート
#include <STG_STD> // インタラクティブモード
#include <SM_SIMPLE> // 簡易ステートマシン
無線送受信に必要な <NWK_SIMPLE>、インタラクティブモードを追加するための <STG_STD>、アプリケーションループの記述を簡素化するための <SM_SIMPLE> をインクルードしています。
センサードライバ この例では SHTC3 (TWELITE AMB PAL) と、SHT40 (TWELITE ARIA) の2種類のコードがあり #ifdef により切り替えています(USE_SHTC3またはUSE_SHT40のどちらかを #define してください)。コードの移植性のため2種類は同じ関数インタフェースとして定義しています。2種類のコードは同メーカ、同系列のセンサーであるため似通っています。
/*** sensor select, define either of USE_SHTC3 or USE_SHT40 */
// use SHTC3 (TWELITE PAL)
#define USE_SHTC3
// use SHT40 (TWELITE ARIA)
#undef USE_SHT40 以下では SHTC3 の例を示します。
#if defined(USE_SHTC3)
// for SHTC3
struct SHTC3 {
uint8_t I2C_ADDR;
uint8_t CONV_TIME;
bool setup () { ... }
bool begin () { ... }
int get_convtime () { return CONV_TIME; }
bool read (int16_t & i16Temp, int16_t & i16Humd) { ... }
} sensor_device; ここではソースコードを整理するため I2C センサー関連の手続きを構造体(クラス) SHTC3 にまとめています。この構造体には I2C アドレス I2C_ADDR と、値取得のための待ち時間 CONV_TIME をメンバー変数として持っており、sensor_device という実体名で宣言しています。
この構造体(クラス)は以下のメンバー関数を持っています。
関数名 解説 setup()構造体の初期化を行う。 begin()センサー値の取得を開始する。開始後、適切なセンサー値が得られるまで一定時間待つ必要がある。 get_convtime()センサー値の取得待ち時間を返す。 read(int&, int&)センサー値を取得する。
コンパイラの制約により、グローバル宣言した場合はコンストラクタが呼び出されないため、コンストラクタの代わりにsetup()を呼び出します。
処理を一つ一つ見ていきます。
setup()
bool setup () {
// here, initialize some member vars instead of constructor.
= 0x70 ;
CONV_TIME = 10 ; // wait time [ms]
return true;
} メンバー変数に I2C アドレスと、センサー値取得待ち時間(上記は10ms)を設定します。
これらの値は原則として固定値ですので変数設定する必要はありません。変数として扱う有効な例として、設定によってより高精度なセンサー稼働をさせるような場合に必要な変換時間を管理する、設定によって I2C の副アドレスを選択するような場合などが考えられます。
begin()
bool begin () {
// send start trigger command
if (auto && wrt = Wire.get_writer(I2C_ADDR)) {
wrt << 0x60 ; // SHTC3_TRIG_H
<< 0x9C ; // SHTC3_TRIG_L
else {
return false;
}
return true;
} センサーを動作させるために指令を書き込みます。
MWXライブラリでは、Wireクラスオブジェクトを用いたI2Cバスへの読み書きに2種類の異なった記述方法がありますが、こちらはヘルパー関数を用いる方法です。
if 文中で Wire.get_writer(I2C_ADDR) は、アドレスI2C_ADDRに対応するI2Cデバイスを開き、その読み書き用のオブジェクトを生成します。読み書きオブジェクト wrt は if 節の (bool) 評価により、デバイスのオープンに失敗したときなどには false を返します。trueが戻った時は無事にオープンできたことになり if節内の処理を行います。
ここでは wrt << 0x60; のように、ストリーム演算子 << を用いて1バイト I2C デバイスに書き込んでいます。このストリーム演算子は原則 uint8_t 型の1バイトを書き込むためのものです。
get_convtime()
int get_convtime () {
return CONV_TIME;
} CONV_TIMEの値を返すための関数です。
read()
bool read (int16_t & i16Temp, int16_t & i16Humd) {
// read result
uint16_t u16temp, u16humd;
uint8_t u8temp_csum, u8humd_csum;
if (auto && rdr = Wire.get_reader(I2C_ADDR, 6 )) {
rdr >> u16temp; // read two bytes (MSB first)
>> u8temp_csum; // check sum (crc8)
>> u16humd; // read two bytes (MSB first)
>> u8humd_csum; // check sum (crc8)
else {
return false;
}
// check CRC and save the values
if ( (CRC8_u8CalcU16(u16temp, 0xff ) == u8temp_csum)
&& (CRC8_u8CalcU16(u16humd, 0xff ) == u8humd_csum))
{
i16Temp = (int16_t )(- 4500 + ((17500 * int32_t (u16temp)) >> 16 ));
i16Humd = (int16_t )((int32_t (u16humd) * 10000 ) >> 16 );
} else {
return false;
}
return true;
} センサーデータを読み出します。
SHTC3では、begin()によりセンサー読み出しを開始してから、数ms待ち時間をおいてセンサー値を読み出します。 センサー値の並びは以下のようになっています。
バイト 解説 0 温度センサー値(上位バイト) 1 温度センサー値(下位バイト) 2 バイト0,1のCRC8値 3 湿度センサー値(上位バイト) 4 湿度センサー値(下位バイト) 5 バイト3,4のCRC8値
SHTC3では、センサー取得開始時に与えるパラメータによってデータの並び順も変化しますが、上記begin()で書き込んだ0x609C コマンドで開始した場合は、温度データが先に到着します。
begin()ではデータを書き出していましたが、ここではデータを読み込みます。データを読み込むには同様に Wire.get_reader() により、ヘルパーオブジェクト rdr を生成します。エラーがなければ rdr は if 節中で true を返します。ここで get_reader(I2C_ADDR, 6) の2番目に与えたパラメータ 6 は、読み出しバイト数です。このバイト数を読みだした時点で I2C バスの読出しを終了する手続きを行います。(デバイスによっては、こういった手続きを省略しても動作するものもありますが、通常は適切な値を与えるようにしてください)
読み出しはストリーム演算子 >> により行っています。読み出し方法にはほかにもいくつかあります。詳しくは ヘルパー関数 を参照してください。ストリーム演算子を用いる場合は、事前に宣言した uint8_t, uint16_t, uint32_t 型の変数に値を入力します。rdr >> u16temp は、uint16_t型の変数に対して2バイトI2Cバスから読み出し**ビッグエンディアン形式(1バイト目は上位バイト)**で格納します。
最終的に i16Temp ・ i16Humd に温度[℃]の100倍値、および湿度[%]の100倍値を計算して格納しています。計算式について I2C デバイスのデータシートを参照してください。
setup()setup()関数は TWELITE が始動したときに1度だけ呼び出される関数です。この関数では、各種初期化を行います。
void setup () {
/*** SETUP section */
...
} ステートマシン SM_SIMPLE の初期化
// application state defs
enum class STATE : uint8_t {
INTERACTIVE = 255 ,
INIT = 0 ,
SENSOR,
TX,
TX_WAIT_COMP,
GO_SLEEP
};
// simple state machine.
< STATE> step;
void setup () {
...
/// init vars or objects
// initialize state machine
} ステートマシン(状態遷移マシン)は、都度呼び出される loop() 文中の記述を簡素化するために用います。もちろん、アプリケーションの記述を行うのに、この例で使用する SM_SIMPLE を使用しなくても構いません。
SM_SIMPLEは、ごく短いコードで実装されており、状態への遷移と、タイムアウトの管理、フラグの管理を簡易的に行えます。状態はあらかじめ列挙体で定義しておきます。上記の例では enum class STATE です。ステートマシンの実体は定義済みの列挙体 STATE をパラメータとして SM_SMPLE<STATE> step のように宣言します。
ビヘイビアの登録
void setup () {
...
/// load board and settings objects
auto && set = the_twelite.settings.use< STG_STD> (); // load save/load settings(interactive mode) support
auto && nwk = the_twelite.network.use< NWK_SIMPLE> (); // load network support
} ビヘイビアは、プログラム中で利用する機能のまとまりです。各種イベントが発生したときの振る舞いが記述されています。
ここでは、インタラクティブモード画面 <STG_STD> と、シンプル中継ネットワーク <NWK_SMPLE> の2種類のビヘイビアを利用します。
インタラクティブモードの設定 STG_STD
...
/// configure settings
// configure settings
<< SETTINGS:: appname(FOURCHARS);
set << SETTINGS:: appid_default(DEFAULT_APP_ID); // set default appID
<< SETTINGS:: ch_default(DEFAULT_CHANNEL); // set default channel
:: OPT_DWORD2, E_STGSTD_SETID:: OPT_DWORD3, E_STGSTD_SETID:: OPT_DWORD4, E_STGSTD_SETID:: ENC_KEY_STRING, E_STGSTD_SETID:: ENC_MODE); 記述するアプリケーションに合わせたインタラクティブモードの設定項目にするため、 STG_STD に対して初期設定を行います。
SETTINGS::appname : アプリケーション名(文字列)を指定します。インタラクティブモード画面上で先頭行に表示されます。画面上の文字数には余裕がないので最小限の文字列にします。SETTINGS::appid_default : アプリケーションIDの規定値です。独自のアプリケーションで独自の規定アプリケーションIDを持たせたい場合に実行します。SETTINGS::ch_default : チャネルの規定値です。独自のアプリケーションで既定のチャネルを持たせたい場合に実行します。続いて set.hide_items() では、既定のインタラクティブモードの画面上で不要な設定項目を削除しています。すべて表示しても構わない場合は、この呼び出しを行う必要はありません。
// if SET(DIO12)=LOW is detected, start with intaractive mode.
if (digitalRead(PIN_DIGITAL:: DIO12) == PIN_STATE:: LOW) {
set << SETTINGS:: open_at_start();
step.next(STATE:: INTERACTIVE);
return ;
} DIO12 のピンが LOW (GNDレベル) で、電源投入またはリセットされた場合は、インタラクティブモードで起動する記述です。digitalRead()でピンの状態を読み取り、SETTINGS::open_at_start()を反映させます。
インタラクティブモード中に通常のアプリケーション処理が行われてしまうと不都合であるため、ステートマシンの状態を STATE::INTERACTIVE に設定します。この状態では、一切の入力等の処理を行わず同じ状態にとどまります。
// load values
// load from EEPROM.
= set.u32opt1(); // this value is not used in this example.
// LID is configured DIP or settings.
= set.u8devid(); // 2nd is setting.
if (LID == 0 ) LID = 0xFE ; // if still 0, set 0xFE (anonymous child)
最後にインタラクティブモードのデータを読み込みます。set.reload() を呼び出すことで、EEPROM に書き込まれたデータを読み込みます。設定が行われず EEPROM に何も情報がない場合は、規定値として読みだせます。
ここではオプションビット set.u32opt1() と、8ビットの論理ID set.u8devid() を読み出します。LID が 0 の場合は、通常親機として運用されるため、この値が記録されている場合は 0xFE (IDを割り振らない子機) としています。
/// configure system basics
<< set; // apply settings (from interactive mode)
<< set; // apply settings (from interactive mode)
<< NWK_SIMPLE:: logical_id(LID); // set LID again (LID can also be configured by DIP-SW.)
最後に the_twelite と nwk に設定情報(の一部)を反映させています。アプリケーションIDやチャネルといった無線通信に必須の情報が反映されます。上記ではこれらの設定に対する明示的な読み出しコードは存在しませんが set.reload() で、設定がなければ規定値に、あれば設定値が読み出されます。
ペリフェラルの初期化
/*** BEGIN section */
Wire.begin(); // start two wire serial bus.
I2C センサーの初期化設定を行っています。
MWX の開始
// let the TWELITE begin!
/*** INIT message */
Serial << "--- TEMP&HUMID:" << FOURCHARS << " ---" << mwx:: crlf;
Serial << format("-- app:x%08x/ch:%d/lid:%d"
, the_twelite.get_appid()
, the_twelite.get_channel()
, nwk.get_config().u8Lid
)
<< mwx:: crlf;
Serial << format("-- pw:%d/retry:%d/opt:x%08x"
, the_twelite.get_tx_power()
, nwk.get_config().u8RetryDefault
, OPT_BITS
)
<< mwx:: crlf; the_twelite.begin() は MWX ライブラリの初期化完了を宣言する手続きです。この処理を行わないと、MWX ライブラリは適切に動作しません。
起動時のメッセージなどもここで表示します。
loop()
void loop () {
do {
switch (step.state()) {
// 各状態の振る舞い
case STATE:: INIT:
...
break ;
...
}
while (step.b_more_loop());
} loop()は、SM_SIMPLEステートマシンstepを用いた制御を行っています。スリープ復帰からセンサー値取得、無線パケット送信、送信完了待ち、スリープといった一連の流れを簡潔に表現するためです。
ステートマシン図
上記の do while 文の制御構造を記述しておきます。ステート(状態)は step.state() で判定します。while の条件式は step.b_more_loop() となっています。これは、ある状態からさらに別の状態に遷移したときに、loop() を抜けずに連続的に処理したい場合があるためです。つまり、別の状態に遷移して switch 節を抜けた場合、次の状態の case 節が呼び出されます。この動作には注意してください。
case STATE::INTERACTIVE:インタラクティブモード中にメインループが動作するのは都合が悪いため、この状態に固定します。
case STATE::INIT:
// start sensor capture
step.set_timeout(sensor_device.get_convtime()); // set timeout
:: SENSOR); センサーのデータ取得を開始します。set_timeout() で、センサー取得の時間待ちを行います。
時間待ちの非常に長いセンサーなどは、ここでいったんスリープを行うといった処理を記述すると電池寿命を延ばすことができますが、構造が複雑になるためこの例では割愛します。必要な場合はスリープ待ちの例を参照してください。
case STATE::SENSOR:
if (step.is_timeout()) {
// the sensor data should be ready (wait some)
Serial << "..finish sensor capture." << mwx:: crlf
<< " : temp=" << div100(sensor.i16temp) << 'C' << mwx:: crlf
<< " humd=" << div100(sensor.i16humid) << '%' << mwx:: crlf
;
Serial.flush();
step.next(STATE:: TX);
} センサーの値を sensor_device.read() により取得して sensor 構造体に値を格納します。
最初に step.is_timeout() によるタイムアウトチェックを行います。タイムアウトの起点は先ほどの step.set_timeout() です。タイムアウトしない場合は、if 節は実行されず、そのまま loop() を抜けます。次のハードウェアイベント(多くの場合はシステムタイマーである1ms ごとに割り込みを発生するTickTimerの割り込み)が来るまではTWELITE マイコンは低電力でCPUが待機するDOZE(ドーズ)モードになります。
無線センサーとしてセンサー側の TWELITE のシリアルポートに結果を出力する必要はありませんが、動作確認を容易にするためシリアルポートに取得値を表示しています。ここで Serial.flush() を行い出力待ちを行っていますが、これは TWELITE がスリープするまでにシリアルポート出力が終わらないことを想定した記述です。この処理も、電池消耗の原因になるためSerial.flush()を行わないようにするか、シリアルポートへの出力をしないようにします。
ここで使用する div100() は、低コストで100の除算を行う関数です。TWELITE には除算回路がありませんので、除算処理は極力行わないことを推奨します。
case STATE::TX:
step.next(STATE:: GO_SLEEP); // set default next state (for error handling.)
// get new packet instance.
if (auto && pkt = the_twelite.network.use< NWK_SIMPLE> ().prepare_tx_packet()) {
...
} 通信手続きを記述します。この状態で待ち処理などを行うことはなく、処理を実行したら速やかに次の状態に遷移します。あらかじめ step.next(STATE::GO_SLEEP) と記述しているのは、エラーなどの検出は複数個所で行われるため、すべての場所で同じ記述を行うことを避けるためです。
if (auto&& pkt = the_twelite.network.use<NWK_SIMPLE>().prepare_tx_packet()) では、送信パケットのオブジェクトを生成し、オブジェクトの生成に成功したら if 節を実行するという処理です。
// set tx packet behavior
<< tx_addr(0x00 ) // 0..0xFF (LID 0:parent, FE:child w/ no id, FF:LID broad cast), 0x8XXXXXXX (long address)
<< tx_retry(0x1 ) // set retry (0x1 send two times in total)
<< tx_packet_delay(0 , 0 , 2 ); // send packet w/ delay
最初に送信の設定を行います。宛先 tx_addr(0x00) を親機 0x00 に設定し、再送回数 tx_retry(0x1) を1回にし、パケットの遅延の設定 tx_packet_delay(0, 0, 2) を初回送信までの遅延は 0、再送間隔を 2ms と設定しています。
pack_bytes(pkt.get_payload()
, make_pair(FOURCHARS, 4 )
, uint16_t (sensor.i16temp)
, uint16_t (sensor.i16humid)
); パケットのペイロード部に識別子のFOURCHARSとセンサーデータを格納します。得られた値のうち温度値は int16_t ですが、送信パケットのデータ構造は符号なしで格納するため、uint16_tにキャストしています。
// do transmit
= pkt.transmit();
if (ret) {
step.clear_flag(); // waiting for flag is set.
100 ); // set timeout
:: TX_WAIT_COMP);} pkt.transmit() を呼び送信要求を行います。この時点ではまだ送信処理は始らず、送信要求を内部のキューに設定しただけです。MWXライブラリ内で適切なタイミングで送信要求が処理されます。
送信要求に成功した場合 ret は true になります。完了を判定するためのフラグの初期化 step.clear_flag()、送信失敗時など予期しないエラーを処理するためのタイムアウト step.set_timeout(100) を設定し、次の状態を STATE::TX_WAIT_COMP にします(STATE::GO_SLEEP の指定は上書きされます)。
case STATE::TX_WAIT_COMP:ここでは送信の完了待ちを行います。タイムアウトの判定(エラー時)または送信完了イベントの判定を行います。
if (step.is_timeout()) { // maybe fatal error.
}
if (step.is_flag_ready()) { // when tx is performed
<< "..transmit complete." << mwx:: crlf;
Serial.flush();
step.next(STATE:: GO_SLEEP);
} STATE::GO_SLEEP:sleepNow()の処理を行います。この関数を呼び出すことで TWELITE はスリープ状態になります。
on_tx_comp()
void on_tx_comp (mwx:: packet_ev_tx& ev, bool_t & b_handled) {
step.set_flag(ev.bStatus);
} 送信完了時に呼び出されるシステムイベントです。ここでは.set_flag()を呼び出しstepのフラグをセットします。
sleepNow()
void sleepNow () {
step.on_sleep(false); // reset state machine.
// randomize sleep duration.
uint32_t u32ct = 1750 + random(0 ,500 );
// output message
<< "..sleeping " << int (u32ct) << "ms." << mwx:: crlf;
Serial.flush(); // wait until all message printed.
// do sleep.
} スリープ前に.on_sleep(false)によりステートマシンの状態を初期化します。パラメータのfalseはスリープ復帰後STATE::INIT(=0)から始めます。
ここでは、起床までの時間を乱数により 1750ms から 2250ms の間に設定しています。これにより他の同じような周期で送信するデバイスのパケットとの連続的な衝突を避けます。
周期が完全に一致すると、互いのパケットで衝突が起き通信が困難になります。通常は時間の経過とともにタイマー周期が互いにずれるため、しばらくすると通信が回復し、また時間がたつと衝突が起きるという繰り返しになります。
8,9行目、この例ではシリアルポートからの出力を待ってスリープに入ります。通常は消費エネルギーを最小化したいため、スリープ前のシリアルポートの出力は最小限(または無し)にします。
12行目、スリープに入るには the_twelite.sleep() を呼びます。この呼び出しの中で、ボード上のハードウェアのスリープ前の手続きなどが行われます。パラメータとしてスリープ時間をmsで指定しています。
TWELITE PAL では、必ず60秒以内に一度起床し、ウォッチドッグタイマーをリセットしなければなりません。スリープ時間は60000を超えないように指定してください。
wakeup()
void wakeup () {
Serial << mwx:: crlf
<< "--- PAL_AMB:" << FOURCHARS << " wake up ---"
<< mwx:: crlf
<< "..start sensor capture again."
<< mwx:: crlf;
...
} スリープから復帰し起床すると wakeup() が呼び出されます。そのあとloop() が都度呼び出されます。wakeup()の前に、UARTなどの各ペリフェラルやボード上のデバイスのウェイクアップ処理が行われます。例えばLEDの点灯制御を再始動します。
1.4.1.8 - BRD_ARIA TWELITE ARIAを使ったサンプル
TWELITE ARIA - トワイライトアリア を用い、センサー値の取得を行います。
このアクトには以下が含まれます。
無線パケットの送受信 インタラクティブモードによる設定 - <STG_STD> ステートマシンによる状態遷移制御 - <SM_SIMPLE> <ARIA>ボードビヘイビアによるボード操作アクトの機能 TWELITE ARIA - トワイライトアリア を用い、センサー値の取得を行います。 コイン電池で動作させるための、スリープ機能を利用します。 アクトの使い方 必要なTWELITE アクトの解説 インクルード
#include <TWELITE>
#include <NWK_SIMPLE> // ネットワークサポート
#include <ARIA> // TWELITE ARIA
#include <STG_STD> // インタラクティブモード
#include <SM_SIMPLE> // 簡易ステートマシン
TWELITE ARIA<ARIA>のボードビヘイビアをインクルードします。
setup()
void setup (){
/*** SETUP section */
/// init vars or objects
// initialize state machine
/// load board and settings objects
auto && brd = the_twelite.board.use< ARIA> (); // load board support
auto && set = the_twelite.settings.use< STG_STD> (); // load save/load settings(interactive mode) support
auto && nwk = the_twelite.network.use< NWK_SIMPLE> (); // load network support
/// configure settings
// configure settings
<< SETTINGS:: appname("ARIA" );
set << SETTINGS:: appid_default(DEFAULT_APP_ID); // set default appID
<< SETTINGS:: ch_default(DEFAULT_CHANNEL); // set default channel
:: OPT_DWORD2, E_STGSTD_SETID:: OPT_DWORD3, E_STGSTD_SETID:: OPT_DWORD4, E_STGSTD_SETID:: ENC_KEY_STRING, E_STGSTD_SETID:: ENC_MODE);
// if SET=LOW is detected, start with intaractive mode.
if (digitalRead(brd.PIN_SET) == PIN_STATE:: LOW) {
set << SETTINGS:: open_at_start();
step.next(STATE:: INTERACTIVE);
return ;
}
// load values
// load from EEPROM.
= set.u32opt1(); // this value is not used in this example.
LID = set.u8devid(); // set logical ID
/// configure system basics
<< set; // apply settings (from interactive mode)
/// configure network
<< set; // apply settings (from interactive mode)
<< NWK_SIMPLE:: logical_id(LID); // set LID again (LID can also be configured by DIP-SW.)
/// configure hardware
// LED setup (use periph_led_timer, which will re-start on wakeup() automatically)
:: BLINK, 10 ); // blink (on 10ms/ off 10ms)
// let the TWELITE begin!
/*** INIT message */
Serial << "--- ARIA:" << FOURCHARS << " ---" << mwx:: crlf;
Serial << format("-- app:x%08x/ch:%d/lid:%d"
, the_twelite.get_appid()
, the_twelite.get_channel()
, nwk.get_config().u8Lid
)
<< mwx:: crlf;
Serial << format("-- pw:%d/retry:%d/opt:x%08x"
, the_twelite.get_tx_power()
, nwk.get_config().u8RetryDefault
, OPT_BITS
)
<< mwx:: crlf;
} 最初に変数などの初期化を行います。ここではステートマシンstepの初期化を行っています。
最初にボードサポート <ARIA> を登録します。ボードサポートの初期化時にセンサーやDIOの初期化が行われます。
auto && brd = the_twelite.board.use< ARIA> (); つづいて、インタラクティブモード関連の初期化と読出しを行います。
// configure settings
<< SETTINGS:: appname("ARIA" );
set << SETTINGS:: appid_default(DEFAULT_APP_ID); // set default appID
<< SETTINGS:: ch_default(DEFAULT_CHANNEL); // set default channel
:: OPT_DWORD2, E_STGSTD_SETID:: OPT_DWORD3, E_STGSTD_SETID:: OPT_DWORD4, E_STGSTD_SETID:: ENC_KEY_STRING, E_STGSTD_SETID:: ENC_MODE);
// if SET=LOW is detected, start with intaractive mode.
if (digitalRead(brd.PIN_SET) == PIN_STATE:: LOW) {
set << SETTINGS:: open_at_start();
step.next(STATE:: INTERACTIVE);
return ;
}
// load values
// load from EEPROM.
= set.u32opt1(); // this value is not used in this example.
LID = set.u8devid(); // set logical ID
ここではsetオブジェクトの取得、アプリ名の反映、デフォルトのアプリケーションIDと通信チャネルの反映、設定メニューで不要項目の削除を行います。
次にSETピンの状態を読み出します。このサンプルはスリープによる間欠動作を行うため、+++入力によるインタラクティブモード遷移は出来ません。替わりに起動時のSETピン=LO状態でインタラクティブモードに遷移します。このときSETTINGS::open_at_start()を指定していますが、これはsetup()を終了後速やかにインタラクティブモード画面に遷移する指定です。
最後に.reload()を実行して設定値をEEPROMから読み出します。設定値を各変数にコピーしています。
このアクトではもっぱら無線パケットを送信しますので、TWENET の設定では動作中に受信回路をオープンにする指定(TWENET::rx_when_idle())は含めません。
the_twelite << set; // apply settings (from interactive mode)
続いてLEDの設定を行います。ここでは 10ms おきに ON/OFF の点滅の設定をします(スリープを行い起床時間が短いアプリケーションでは、起床中は点灯するという設定とほぼ同じ意味合いになります)。
brd.set_led(LED_TIMER:: BLINK, 10 ); // blink (on 10ms/ off 10ms)
loop()
void loop () {
auto && brd = the_twelite.board.use< ARIA> ();
do {
switch (step.state()) {
// 各状態の振る舞い
case STATE:: INIT:
...
break ;
...
}
while (step.b_more_loop());
} loop()は、SM_SIMPLEステートマシンstepを用いた制御を行っています。スリープ復帰からセンサー値取得、無線パケット送信、送信完了待ち、スリープといった一連の流れを簡潔に表現するためです。ループの戦闘ではbrdオブジェクトを取得しています。
case STATE::INTERACTIVE:インタラクティブモード中にメインループが動作するのは都合が悪いため、この状態に固定します。
case STATE::INIT:
brd.sns_SHT4x.begin();
step.next(STATE:: SENSOR); センサーのデータ取得を開始します。
case STATE::SENSOR:
// wait until sensor capture finish
if (! brd.sns_SHT4x.available()) {
brd.sns_SHT4x.process_ev(E_EVENT_TICK_TIMER);
}else { // now sensor data is ready.
= brd.sns_SHT4x.get_temp_cent();
sensor.i16humid = brd.sns_SHT4x.get_humid_per_dmil();
// read magnet sensor
= digitalRead(ARIA:: PIN_SNS_NORTH);
sensor.b_south = digitalRead(ARIA:: PIN_SNS_SOUTH);
Serial << "..finish sensor capture." << mwx:: crlf
<< " MAGnet : north=" << int (sensor.b_north) << mwx:: crlf
<< " south=" << int (sensor.b_south) << mwx:: crlf
<< " SHT4x : temp=" << div100(sensor.i16temp) << 'C' << mwx:: crlf
<< " humd=" << div100(sensor.i16humid) << '%' << mwx:: crlf
;
Serial.flush();
step.next(STATE:: TX);
} ボード上のセンサーは .sns_SHT4x という名前でアクセスでき、このオブジェクトに操作を行います。センサーの完了待ちを行います。まだセンサーの取得が終わっていない場合(.available()がfalse)はセンサーに対して時間経過のイベント(.process_ev(E_EVENT_TICK_TIMER))を送付します。
センサーがavailableになった時点で、センサー値を取得し、STATE_TXに遷移します。
温湿度センサーは以下のように取得できます。
.get_temp_cent() : int16_t : 1℃を100とした温度 (25.6 ℃なら 2560).get_temp() : float : float値 (25.6 ℃なら 25.6).get_humid_dmil() : int16_t : 1%を100とした湿度 (56.8%なら 5680).get_temp() : float : float値 (56.8%なら 56.8)case STATE::TX:送信手続きについては他のアクトのサンプルと同様です。ここでは、再送1回、再送遅延を最小にする設定になっています。
pkt << tx_addr(0x00 ) // 親機0x00宛
<< tx_retry(0x1 ) // リトライ1回
<< tx_packet_delay(0 , 0 , 2 ); // 遅延は最小限
パケットのペイロード部に識別子のFOURCHARSとセンサーデータを格納します。得られた値のうち温度値は int16_t ですが、送信パケットのデータ構造は符号なしで格納するため、uint16_tにキャストしています。
pack_bytes(pkt.get_payload() // set payload data objects.
4 ) // just to see packet identification, you can design in any.
uint8_t (sensor.b_north)
, uint8_t (sensor.b_south)
, uint16_t (sensor.i16temp)
, uint16_t (sensor.i16humid)
); 送信要求を行います。送信要求が成功したら送信完了街の準備を行います。完了イベントを待つために.clear_flag()、万が一のときのタイムアウトをset_timeout(100)を指定します。パラメータの100の単位はミリ秒[ms]です。
// do transmit
= pkt.transmit();
if (ret) {
step.clear_flag(); // waiting for flag is set.
100 ); // set timeout
:: TX_WAIT_COMP);
} case STATE::TX_WAIT_COMP:ここではタイムアウトの判定、送信完了イベントの判定を行います。
if (step.is_timeout()) { // maybe fatal error.
}
if (step.is_flag_ready()) { // when tx is performed
<< "..transmit complete." << mwx:: crlf;
Serial.flush();
step.next(STATE:: GO_SLEEP);
} STATE::GO_SLEEP:sleepNow()の処理を行います。
on_tx_comp()
void on_tx_comp (mwx:: packet_ev_tx& ev, bool_t & b_handled) {
step.set_flag(ev.bStatus);
} 送信完了時に呼び出されるシステムイベントです。ここでは.set_flag()により完了としています。
sleepNow()スリープに入る手続きをまとめています。
void sleepNow () {
step.on_sleep(false); // reset state machine.
// randomize sleep duration.
uint32_t u32ct = 1750 + random(0 ,500 );
// set an interrupt for MAGnet sensor.
:: PIN_SNS_OUT1, PIN_MODE:: WAKE_FALLING);
pinMode(ARIA:: PIN_SNS_OUT2, PIN_MODE:: WAKE_FALLING);
// output message
<< "..sleeping " << int (u32ct) << "ms." << mwx:: crlf;
Serial.flush(); // wait until all message printed.
// do sleep.
} スリープ前に.on_sleep(false)によりステートマシンの状態を初期化します。パラメータのfalseはスリープ復帰後STATE::INIT(=0)から始めます。
ここでは、起床までの時間を乱数により 1750ms から 2250ms の間に設定しています。これにより他の同じような周期で送信するデバイスのパケットとの連続的な衝突を避けます。
周期が完全に一致すると、互いのパケットで衝突が起き通信が困難になります。通常は時間の経過とともにタイマー周期が互いにずれるため、しばらくすると通信が回復し、また時間がたつと衝突が起きるという繰り返しになります。
8,9行目では、スリープに入るまえに磁気センサーのDIOピンの割り込み設定をします。pinMode()を用います。2番めのパラメータはPIN_MODE::WAKE_FALLINGを指定しています。これはHIGHからLOWへピンの状態が変化したときに起床する設定です。
12,13行目、この例ではシリアルポートからの出力を待ってスリープに入ります。通常は消費エネルギーを最小化したいため、スリープ前のシリアルポートの出力は最小限(または無し)にします。
16行目、スリープに入るには the_twelite.sleep() を呼びます。この呼び出しの中で、ボード上のハードウェアのスリープ前の手続きなどが行われます。たとえばLEDは消灯します。
パラメータとしてスリープ時間をmsで指定しています。
TWELITE ARIA では、必ず60秒以内に一度起床し、ウォッチドッグタイマーをリセットしなければなりません。スリープ時間は60000を超えないように指定してください。
wakeup()スリープから復帰し起床すると wakeup() が呼び出されます。そのあとloop() が都度呼び出されます。wakeup()の前に、UARTなどの各ペリフェラルやボード上のデバイスのウェイクアップ処理が行われます。例えばLEDの点灯制御を再始動します。
void wakeup () {
Serial << mwx:: crlf
<< "--- ARIA:" << FOURCHARS << " wake up " ;
if (the_twelite.is_wokeup_by_wktimer()) {
Serial << "(WakeTimer) ---" ;
} else
if (the_twelite.is_wokeup_by_dio(ARIA:: PIN_SNS_NORTH)) {
Serial << "(MAGnet INT [N]) ---" ;
} else
if (the_twelite.is_wokeup_by_dio(ARIA:: PIN_SNS_SOUTH)) {
Serial << "(MAGnet INT [S]) ---" ;
} else {
Serial << "(unknown source) ---" ;
}
Serial << mwx:: crlf
<< "..start sensor capture again."
<< mwx:: crlf;
} 1.4.1.9 - PAL_AMB 環境センサーパルを使ったサンプル
このアクトには以下が含まれます。
無線パケットの送受信 インタラクティブモードによる設定 - <STG_STD> ステートマシンによる状態遷移制御 - <SM_SIMPLE> <PAL_AMB>ボードビヘイビアによるボード操作アクトの機能 環境センサーパル AMPIENT SENSE PAL を用い、センサー値の取得を行います。 コイン電池で動作させるための、スリープ機能を利用します。 アクトの使い方 必要なTWELITE アクトの解説 インクルード
#include <TWELITE>
#include <NWK_SIMPLE> // ネットワークサポート
#include <PAL_AMB> // PAL_AMB
#include <STG_STD> // インタラクティブモード
#include <SM_SIMPLE> // 簡易ステートマシン
環境センサーパル <PAL_AMB> のボードビヘイビアをインクルードします。
setup()
void setup () {
/*** SETUP section */
step.setup(); // ステートマシンの初期化
// PAL_AMBのボードビヘイビアを読み込む
auto && brd = the_twelite.board.use< PAL_AMB> ();
// インタラクティブモードを読み込む
auto && set = the_twelite.settings.use< STG_STD> ();
set << SETTINGS:: appname(FOURCHARS);
set << SETTINGS:: appid_default(APP_ID); // set default appID
:: POWER_N_RETRY, E_STGSTD_SETID:: OPT_DWORD2, E_STGSTD_SETID:: OPT_DWORD3, E_STGSTD_SETID:: OPT_DWORD4, E_STGSTD_SETID:: ENC_KEY_STRING, E_STGSTD_SETID:: ENC_MODE);
// SET ピンを検出した場合は、インタラクティブモードを起動する
if (digitalRead(brd.PIN_BTN) == PIN_STATE:: LOW) {
set << SETTINGS:: open_at_start();
step.next(STATE:: INTERACTIVE);
return ;
}
// インタラクティブモードのデータを読み出す
APP_ID = set.u32appid();
CHANNEL = set.u8ch();
OPT_BITS = set.u32opt1();
// DIPスイッチとインタラクティブモードの設定からLIDを決める
= (brd.get_DIPSW_BM() & 0x07 ); // 1st priority is DIP SW
if (LID == 0 ) LID = set.u8devid(); // 2nd is setting.
if (LID == 0 ) LID = 0xFE ; // if still 0, set 0xFE (anonymous child)
// LED初期化
:: BLINK, 10 ); // blink (on 10ms/ off 10ms)
// the twelite main object.
<< TWENET:: appid(APP_ID) // set application ID (identify network group)
<< TWENET:: channel(CHANNEL); // set channel (pysical channel)
// Register Network
auto && nwk = the_twelite.network.use< NWK_SIMPLE> ();
nwk << NWK_SIMPLE:: logical_id(u8ID); // set Logical ID. (0xFE means a child device with no ID)
/*** BEGIN section */
Wire.begin(); // start two wire serial bus.
:: A1, PIN_ANALOGUE:: VCC)); // _start continuous adc capture.
the_twelite.begin(); // start twelite!
startSensorCapture(); // start sensor capture!
/*** INIT message */
Serial << "--- PAL_AMB:" << FOURCHARS << " ---" << mwx:: crlf;
} 最初に変数などの初期化を行います。ここではステートマシンstepの初期化を行っています。
最初にボードサポート <PAL_AMB> を登録します。ボードサポートの初期化時にセンサーやDIOの初期化が行われます。最初に行うのは、ボードのDIP SWなどの状態を確認してから、ネットワークの設定などを行うといった処理が一般的だからです。
auto && brd = the_twelite.board.use< PAL_AMB> (); つづいて、インタラクティブモード関連の初期化と読出しを行います。
// インタラクティブモードを読み込む
auto && set = the_twelite.settings.use< STG_STD> ();
set << SETTINGS:: appname(FOURCHARS);
set << SETTINGS:: appid_default(APP_ID); // set default appID
:: POWER_N_RETRY, E_STGSTD_SETID:: OPT_DWORD2, E_STGSTD_SETID:: OPT_DWORD3, E_STGSTD_SETID:: OPT_DWORD4, E_STGSTD_SETID:: ENC_KEY_STRING, E_STGSTD_SETID:: ENC_MODE);
// SET ピンを検出した場合は、インタラクティブモードを起動する
if (digitalRead(brd.PIN_BTN) == PIN_STATE:: LOW) {
set << SETTINGS:: open_at_start();
step.next(STATE:: INTERACTIVE);
return ;
}
// インタラクティブモードのデータを読み出す
APP_ID = set.u32appid();
CHANNEL = set.u8ch();
OPT_BITS = set.u32opt1();
// DIPスイッチとインタラクティブモードの設定からLIDを決める
= (brd.get_DIPSW_BM() & 0x07 ); // 1st priority is DIP SW
if (LID == 0 ) LID = set.u8devid(); // 2nd is setting.
if (LID == 0 ) LID = 0xFE ; // if still 0, set 0xFE (anonymous child)
ここではsetオブジェクトの取得、アプリ名の反映、デフォルトのアプリケーションIDと通信チャネルの反映、設定メニューで不要項目の削除を行います。
次にSETピンの状態を読み出します。このサンプルはスリープによる間欠動作を行うため、+++入力によるインタラクティブモード遷移は出来ません。替わりに起動時のSETピン=LO状態でインタラクティブモードに遷移します。このときSETTINGS::open_at_start()を指定していますが、これはsetup()を終了後速やかにインタラクティブモード画面に遷移する指定です。
最後に.reload()を実行して設定値をEEPROMから読み出します。設定値を各変数にコピーしています。
続いてLEDの設定を行います。ここでは 10ms おきに ON/OFF の点滅の設定をします(スリープを行い起床時間が短いアプリケーションでは、起床中は点灯するという設定とほぼ同じ意味合いになります)。
brd.set_led(LED_TIMER:: BLINK, 10 ); // blink (on 10ms/ off 10ms)
このアクトではもっぱら無線パケットを送信しますので、TWENET の設定では動作中に受信回路をオープンにする指定(TWENET::rx_when_idle())は含めません。
the_twelite
<< TWENET:: appid(APP_ID) // set application ID (identify network group)
<< TWENET:: channel(CHANNEL); // set channel (pysical channel)
ボード上のセンサーはI2Cバスを用いますので、バスを利用開始しておきます。
Wire.begin(); // start two wire serial bus.
ボード上のセンサーの取得を開始します。startSensorCapture()の解説を参照ください。
loop()
void loop () {
auto && brd = the_twelite.board.use< PAL_AMB> ();
do {
switch (step.state()) {
// 各状態の振る舞い
case STATE:: INIT:
...
break ;
...
}
while (step.b_more_loop());
} loop()は、SM_SIMPLEステートマシンstepを用いた制御を行っています。スリープ復帰からセンサー値取得、無線パケット送信、送信完了待ち、スリープといった一連の流れを簡潔に表現するためです。ループの戦闘ではbrdオブジェクトを取得しています。
case STATE::INTERACTIVE:インタラクティブモード中にメインループが動作するのは都合が悪いため、この状態に固定します。
case STATE::INIT:
brd.sns_SHTC3.begin();
brd.sns_LTR308ALS.begin();
step.next(STATE:: SENSOR); センサーのデータ取得を開始します。
case STATE::SENSOR:
if (! brd.sns_LTR308ALS.available()) {
brd.sns_LTR308ALS.process_ev(E_EVENT_TICK_TIMER);
}
if (! brd.sns_SHTC3.available()) {
brd.sns_SHTC3.process_ev(E_EVENT_TICK_TIMER);
} ボード上のセンサーは .sns_LTR308ALS または .sns_SHTC3 という名前でアクセスでき、このオブジェクトに操作を行います。センサーの完了待ちを行います。まだセンサーの取得が終わっていない場合(.available()がfalse)はセンサーに対して時間経過のイベント(.process_ev(E_EVENT_TICK_TIMER))を送付します。
センサーがavailableになった時点で、センサー値を取得し、STATE_TXに遷移します。
// now sensor data is ready.
if (brd.sns_LTR308ALS.available() && brd.sns_SHTC3.available()) {
sensor.u32luminance = brd.sns_LTR308ALS.get_luminance();
sensor.i16temp = brd.sns_SHTC3.get_temp_cent();
sensor.i16humid = brd.sns_SHTC3.get_humid_per_dmil();
Serial << "..finish sensor capture." << mwx:: crlf
<< " LTR308ALS: lumi=" << int (sensor.u32luminance) << mwx:: crlf
<< " SHTC3 : temp=" << div100(sensor.i16temp) << 'C' << mwx:: crlf
<< " humd=" << div100(sensor.i16humid) << '%' << mwx:: crlf
;
Serial.flush();
step.next(STATE:: TX);
} 照度センサーは.get_luminance() : uint32_tで得られます。
温湿度センサーは以下のように取得できます。
.get_temp_cent() : int16_t : 1℃を100とした温度 (25.6 ℃なら 2560).get_temp() : float : float値 (25.6 ℃なら 25.6).get_humid_dmil() : int16_t : 1%を100とした湿度 (56.8%なら 5680).get_temp() : float : float値 (56.8%なら 56.8)case STATE::TX:送信手続きについては他のアクトのサンプルと同様です。ここでは、再送1回、再送遅延を最小にする設定になっています。
pkt << tx_addr(0x00 ) // 親機0x00宛
<< tx_retry(0x1 ) // リトライ1回
<< tx_packet_delay(0 , 0 , 2 ); // 遅延は最小限
パケットのペイロード部に識別子のFOURCHARSとセンサーデータを格納します。得られた値のうち温度値は int16_t ですが、送信パケットのデータ構造は符号なしで格納するため、uint16_tにキャストしています。
pack_bytes(pkt.get_payload()
, make_pair(FOURCHARS, 4 )
, uint32_t (sensor.u32luminance)
, uint16_t (sensor.i16temp)
, uint16_t (sensor.i16humid)
); 送信要求を行います。送信要求が成功したら送信完了街の準備を行います。完了イベントを待つために.clear_flag()、万が一のときのタイムアウトをset_timeout(100)を指定します。パラメータの100の単位はミリ秒[ms]です。
// do transmit
= pkt.transmit();
if (ret) {
step.clear_flag(); // waiting for flag is set.
100 ); // set timeout
:: TX_WAIT_COMP);
} case STATE::TX_WAIT_COMP:ここではタイムアウトの判定、送信完了イベントの判定を行います。
if (step.is_timeout()) { // maybe fatal error.
}
if (step.is_flag_ready()) { // when tx is performed
<< "..transmit complete." << mwx:: crlf;
Serial.flush();
step.next(STATE:: GO_SLEEP);
} STATE::GO_SLEEP:sleepNow()の処理を行います。
on_tx_comp()
void on_tx_comp (mwx:: packet_ev_tx& ev, bool_t & b_handled) {
step.set_flag(ev.bStatus);
} 送信完了時に呼び出されるシステムイベントです。ここでは.set_flag()により完了としています。
sleepNow()スリープに入る手続きをまとめています。
void sleepNow () {
step.on_sleep(false); // reset state machine.
// randomize sleep duration.
uint32_t u32ct = 1750 + random(0 ,500 );
// output message
<< "..sleeping " << int (u32ct) << "ms." << mwx:: crlf;
Serial.flush(); // wait until all message printed.
// do sleep.
} スリープ前に.on_sleep(false)によりステートマシンの状態を初期化します。パラメータのfalseはスリープ復帰後STATE::INIT(=0)から始めます。
ここでは、起床までの時間を乱数により 1750ms から 2250ms の間に設定しています。これにより他の同じような周期で送信するデバイスのパケットとの連続的な衝突を避けます。
周期が完全に一致すると、互いのパケットで衝突が起き通信が困難になります。通常は時間の経過とともにタイマー周期が互いにずれるため、しばらくすると通信が回復し、また時間がたつと衝突が起きるという繰り返しになります。
8,9行目、この例ではシリアルポートからの出力を待ってスリープに入ります。通常は消費エネルギーを最小化したいため、スリープ前のシリアルポートの出力は最小限(または無し)にします。
12行目、スリープに入るには the_twelite.sleep() を呼びます。この呼び出しの中で、ボード上のハードウェアのスリープ前の手続きなどが行われます。たとえばLEDは消灯します。
パラメータとしてスリープ時間をmsで指定しています。
TWELITE PAL では、必ず60秒以内に一度起床し、ウォッチドッグタイマーをリセットしなければなりません。スリープ時間は60000を超えないように指定してください。
wakeup()スリープから復帰し起床すると wakeup() が呼び出されます。そのあとloop() が都度呼び出されます。wakeup()の前に、UARTなどの各ペリフェラルやボード上のデバイスのウェイクアップ処理が行われます。例えばLEDの点灯制御を再始動します。
void wakeup () {
Serial << mwx:: crlf
<< "--- PAL_AMB:" << FOURCHARS << " wake up ---"
<< mwx:: crlf
<< "..start sensor capture again."
<< mwx:: crlf; 応用編 消費エネルギーの削減 アクト PAL_AMB-UseNap は、センサーのデータ取得待ちをスリープで行い、より低消費エネルギーで動作できます。
1.4.1.10 - PAL_AMB-usenap 環境センサーパルを使ったサンプル
環境センサーパル AMBIENT SENSE PAL を用いて、センサー値の取得を行います。
PAL_AMB サンプルを改良し、センサーデータ取得中の待ち時間(約50ms)を、スリープで待つようにします。
このアクトには以下が含まれます。
無線パケットの送受信 インタラクティブモードによる設定 - <STG_STD> ステートマシンによる状態遷移制御 - <SM_SIMPLE> <PAL_AMB>ボードビヘイビアによるボード操作アクトの機能 環境センサーパル AMPIENT SENSE PAL を用い、センサー値の取得を行います。 コイン電池で動作させるための、スリープ機能を利用します。 センサデータ取得中にもスリープ機能を利用します。 アクトの解説 begin()begin()関数はsetup()関数を終了し(そのあとTWENETの初期化が行われる)一番最初のloop()の直前で呼ばれます。
void begin () {
sleepNow(); // the first time is just sleeping.
setup()終了後に初回スリープを実行します。setup()中にセンサーデータ取得を開始していますが、この結果は評価せず、センサーを事前に一度は動かしておくという意味あいで、必ずしも必要な手続きではありません。
wakeup()起床後の手続きです。以下の処理を行います。
まだセンサーデータの取得開始をしていない場合、センサーデータ取得を行い、短いスリープに入る。 直前にセンサーデータ取得開始を行ったので、データを確認して無線送信する。
void wakeup () {
if (! b_senser_started) {
// delete/make shorter this message if power requirement is harder.
<< mwx:: crlf
<< "--- PAL_AMB:" << FOURCHARS << " wake up ---"
<< mwx:: crlf
<< "..start sensor capture again."
<< mwx:: crlf;
startSensorCapture();
b_senser_started = true;
napNow(); // short period sleep.
else {
Serial << "..wake up from short nap.." << mwx:: crlf;
auto && brd = the_twelite.board.use< PAL_AMB> ();
b_senser_started = false;
// tell sensors waking up.
brd.sns_SHTC3.process_ev(E_EVENT_START_UP);
}
} 上記の分岐をグローバル変数のb_sensor_startedにより制御しています。!b_sensor_startedの場合はセンサー取得開始(startSensorCapture())を行い、napNow()により短いスリープに入ります。時間は100msです。
napNow()によるスリープ復帰後、b_sensor_started==trueの節が実行されます。ここでは、2つのセンサーに対してE_EVENT_START_UPイベントを通知しています。このイベントは、センサーの取得が終了するのに十分な時間が経過したことを意味します。この通知をもとにsns_LTR308ALSとsns_SHTC3はavailableになります。この後loop()に移行し、無線パケットが送信されます。
センサーに通知するイベントは必要な時間待ちが終わったかどうかを判定するために使われます。実際時間が経過しているかどうかはnapNow()で正しい時間を設定したかどうかで決まります。短い時間で起床した場合は、必要とされる時間経過に足りないため、続く処理でセンサーデータが得られないなどのエラーが出ることが想定されます。
napNow()ごく短いスリープを実行する。
void napNow () {
uint32_t u32ct = 100 ;
Serial << "..nap " << int (u32ct) << "ms." << mwx:: crlf;
the_twelite.sleep(u32ct, false, false, TWENET:: SLEEP_WAKETIMER_SECONDARY);
} sleepのパラメータの2番目をtrueにすると前回のスリープ復帰時刻をもとに次の復帰時間を調整します。常に5秒おきに起床したいような場合設定します。
3番目をtrueにするとメモリーを保持しないスリープになります。復帰後はwakeup()は呼び出されじ、電源再投入と同じ処理になります。
4番目はウェイクアップタイマーの2番目を使う指定です。ここでは1番目は通常のスリープに使用して、2番目を短いスリープに用いています。このアクトでは2番目を使う強い理由はありませんが、例えば上述の5秒おきに起床したいような場合、短いスリープに1番目のタイマーを用いてしまうとカウンター値がリセットされてしまい、経過時間の補正計算が煩雑になるため2番目のタイマーを使用します。
あまり短いスリープ時間を設定してもスリープ復帰後のシステムの再初期化などのエネルギーコストと釣り合いません。目安として最小時間を30-50ms程度とお考え下さい。
1.4.1.11 - PAL_AMB-behavior 環境センサーパルを使ったサンプル
このサンプルは
ビヘイビア の記述方法のサンプルです。ビヘイビアはより複雑なアプリケーションを記述する際に用います。
アクトの機能 環境センサーパル AMBIENT SENSE PAL を用い、センサー値の取得を行います。 コイン電池で動作させるための、スリープ機能を利用します。 アクトの使い方 TWELITEの準備
親機にPALを使用する場合は、コイン電池での動作はできません。目安として50mA以上の電流を安定して得られるような電源環境を用意してください。
ファイル構成 PAL_AMB-behavior.hpp : setup()のみの定義です。DIP-SWを読み出し、D1..D3が上位置の場合は親機として動作し、それ以外は子機としてDIP SWに対応するIDをセットします。 Parent/myAppBhvParent.hpp : 親機用のビヘイビアクラス定義 Parent/myAppBhvParent.cpp : 実装 Parent/myAppBhvParent-handlers.cpp : ハンドラーの実装 Parent/myAppBhvParent.hpp : 子機用のビヘイビアクラス定義 Parent/myAppBhvParent.cpp : 実装 Parent/myAppBhvParent-handlers.cpp : ハンドラーの実装 親機のビヘイビア名は<MY_APP_PARENT>、子機は<MY_APP_CHILD>です。
setup()
// now read DIP sw status can be read.
= (brd.get_DIPSW_BM() & 0x07 );
// Register App Behavior (set differnt Application by DIP SW settings)
if (u8ID == 0 ) {
// put settings to the twelite main object.
<< TWENET:: appid(APP_ID) // set application ID (identify network group)
<< TWENET:: channel(CHANNEL) // set channel (pysical channel)
<< TWENET:: rx_when_idle(); // open RX channel
the_twelite.app.use< MY_APP_PARENT> ();
} else {
// put settings to the twelite main object.
<< TWENET:: appid(APP_ID) // set application ID (identify network group)
<< TWENET:: channel(CHANNEL); // set channel (pysical channel)
the_twelite.app.use< MY_APP_CHILD> ();
} DIP SWの読み値が0の場合は親機用のビヘイビア<MY_APP_PARENT>を、それ以外の場合は子機用のビヘイビア<MY_APP_CHILD>を登録します。
親機がMONOSTICKの場合は、PAL用のDIP SWの読み値は0となり、親機としてふるまいます。ただしこの動作はMONOSTICKの仕様として定義されているものではありません。
親機のビヘイビア 親機はスリープをしない受信機としてふるまい、子機からのパケットを受信したときにシリアルポートにパケットの情報を出力します。
MY_APP_PARENT::receive()
void MY_APP_PARENT:: receive(mwx:: packet_rx& rx) {
uint8_t msg[4 ];
uint32_t lumi;
uint16_t u16temp, u16humid;
// expand packet payload (shall match with sent packet data structure, see pack_bytes())
auto && np = expand_bytes(rx.get_payload().begin(), rx.get_payload().end(), msg);
// if PING packet, respond pong!
if (! strncmp((const char * )msg, (const char * )FOURCHARS, 4 )) {
// get rest of data
// print them
<< format("Packet(%x:%d/lq=%d/sq=%d): " ,
rx.get_addr_src_long(), rx.get_addr_src_lid(),
rx.get_lqi(), rx.get_psRxDataApp()-> u8Seq)
<< "temp=" << double (int16_t (u16temp)/ 100.0 )
<< "C humid=" << double (int16_t (u16humid)/ 100.0 )
<< "% lumi=" << int (lumi)
<< mwx:: crlf << mwx:: flush;
}
} 親機用がパケットを受信したときは、パケットの先頭4文字が照合(FOURCHARS)できれば、そのパケット内容を表示します。
MY_APP_PARENT::MWX_TICKTIMER_INT()
MWX_TICKTIMER_INT(uint32_t arg, uint8_t & handled) {
// blink LED
:: PIN_LED,
((millis() >> 9 ) & 1 ) ? PIN_STATE:: HIGH : PIN_STATE:: LOW);
} 親機の割り込みハンドラはLEDの点滅を行います。
MY_APP_PARENT::MWX_DIO_EVENT(PAL_AMB::PIN_BTN)
MWX_DIO_EVENT(PAL_AMB:: PIN_BTN, uint32_t arg) {
Serial << "Button Pressed" << mwx:: crlf;
static uint32_t u32tick_last;
uint32_t tick = millis();
if (tick - u32tick_last > 100 ) {
PEV_Process(E_ORDER_KICK, 0UL );
}
u32tick_last = tick;
} PAL上のボタン(5)が押されたときには、状態マシンに対してE_ORDER_KICKイベントを発行します。
MY_APP_PARENT::MWX_STATE(E_MWX::STATE_0 .. 3)状態マシンは、状態遷移の参考として記述したもので、アプリケーションの動作上意味のあるものではありません。ボタンから送付されるE_ORDER_KICKイベントによる状態遷移や、タイムアウトなどを実行しています。
子機のビヘイビア 子機の動作の流れはPAL_AMB-usenapと同じです。初回スリープから「起床→センサー動作開始→短いスリープ→起床→センサー値取得→無線送信→無線送信完了待ち→スリープ」を繰り返します。
MY_APP_CHILD::on_begin()
void _begin () {
// sleep immediately.
<< "..go into first sleep (1000ms)" << mwx:: flush;
the_twelite.sleep(1000 );
} on_begin()から呼び出される_begin()関数では、初回スリープを実行しています。
(※_begin()関数で本処理を記述せずon_begin()に直接記述してもかまいません)
MY_APP_CHILD::wakeup()
void wakeup (uint32_t & val) {
Serial << mwx:: crlf << "..wakeup" << mwx:: crlf;
// init wire device.
// turn on LED
:: PIN_LED, PIN_STATE:: LOW);
// KICK it!
0 ); // pass the event to state machine
スリープからの起床処理を記述しています。
ここで初回のWire.begin()を実行しています。2回目以降のスリープ起床時では冗長な記述です。この処理はon_begin()に移動してもかまいません。
MY_APP_CHILD::transmit_complete()
void transmit_complete (mwx:: packet_ev_tx& txev) {
Serial << "..txcomp=" << int (txev.u8CbId) << mwx:: crlf;
PEV_Process(E_ORDER_KICK, txev.u8CbId); // pass the event to state machine
送信完了時に状態マシンに対してE_ORDER_KICKメッセージを処理します。
MY_APP_CHILD::transmit_complete()
static const uint8_t STATE_IDLE = E_MWX:: STATE_0;
static const uint8_t STATE_SENSOR = E_MWX:: STATE_1;
static const uint8_t STATE_TX = E_MWX:: STATE_2;
static const uint8_t STATE_SLEEP = E_MWX:: STATE_3; 状態名を定義しています。
MY_APP_CHILD::shtc3_???()
MWX_APIRET MY_APP_CHILD:: shtc3_start()
MWX_APIRET MY_APP_CHILD:: shtc3_read() SHTC3用のセンサー取得実装例です。送付コマンド等の詳細はSHTC3のデータシートなどを参考にしてください。
MY_APP_CHILD::ltr308als_???()
MWX_APIRET MY_APP_CHILD:: ltr308als_read()
MWX_APIRET MY_APP_CHILD:: ltr308als_start()
static MWX_APIRET WireWriteAngGet(uint8_t addr, uint8_t cmd) LTR308ALSのセンサー取得実装例です。送付コマンド等の詳細はLTR308ALSのデータシートなどを参考にしてください。
WireWriteAndGet()はaddrのデバイスに対してcmdを1バイト送信してから、1バイト受信して値を返します。
MY_APP_CHILD::STATE_IDLE (0)
MWX_STATE(MY_APP_CHILD:: STATE_IDLE, uint32_t ev, uint32_t evarg) {
if (PEV_is_coldboot(ev,evarg)) {
Serial << "[STATE_IDLE:START_UP(" << int (evarg) << ")]" << mwx:: crlf;
// then perform the first sleep at on_begin().
else
if (PEV_is_warmboot(ev,evarg)) {
Serial << "[STATE_IDLE:START_UP(" << int (evarg) << ")]" << mwx:: crlf;
PEV_SetState(STATE_SENSOR);
}
} 0番の状態は特別な意味を持ちます。起動直後またはスリープ復帰後の状態です。
起動直後PEV_is_coldboot(ev,evarg)判定がtrueになって呼び出されます。on_begin()から、そのままスリープしてしまうため、状態遷移するようなコードも含まれません。**この時点では主要な初期化がまだ終わっていませんので、無線パケットの送信など複雑な処理を行うことが出来ません。**そのような処理を行うための最初の状態遷移を行うためにはon_begin()からイベントを送り、そのイベントに従って状態遷移を行います。
スリープ復帰後はPEV_is_warmboot(ev,evarg)がtrueになる呼び出しが最初にあります。PEV_SetState()を呼び出しSTATE_SENSOR状態に遷移します。
MY_APP_CHILD::STATE_SENSOR
MWX_STATE(MY_APP_CHILD:: STATE_SENSOR, uint32_t ev, uint32_t evarg) {
if (ev == E_EVENT_NEW_STATE) {
Serial << "[STATE_SENSOR:NEW] Start Sensor." << mwx:: crlf;
// start sensor capture
ltr308als_start();
// take a nap waiting finish of capture.
<< "..nap for 66ms" << mwx:: crlf;
Serial.flush();
PEV_KeepStateOnWakeup(); // stay this state on waking up.
66 , false, false, TWENET:: SLEEP_WAKETIMER_SECONDARY);
} else
if (PEV_is_warmboot(ev,evarg)) {
// on wakeup, code starts here.
<< "[STATE_SENSOR:START_UP] Wakeup." << mwx:: crlf;
PEV_SetState(STATE_TX);
}
} スリープ復帰後STATE_IDLEから遷移したとき、STATE_SENSORの状態ハンドラが続けて呼び出されます。この時のイベントevはE_EVENT_NEW_STATEです。
ここではSHTC3, LTR308ALSの2センサーの動作開始を行います。一定時間経過すれば、センサーはデータ取得可能な状態になります。この時間待ちを66ms設定のスリープで行います。スリープ前にPEV_KeepStateOnWakeup()が呼ばれている点に注意してください。この呼び出しを行うと、スリープ復帰後の状態はSTATE_IDLEではなく、スリープしたときの状態、つまりSTATE_SENSORとなります。
短いスリープから復帰するとPEV_is_warmboot(ev,evarg)判定がtrueとなる呼び出しが最初に発生します。この呼び出し時点で、無線パケットの送信などを行うことが出来ます。STATE_TXに遷移します。
MY_APP_CHILD::STATE_TX
MWX_STATE(MY_APP_CHILD:: STATE_TX, uint32_t ev, uint32_t evarg)
static int u8txid;
if (ev == E_EVENT_NEW_STATE) {
Serial << "[STATE_TX:NEW]" << mwx:: crlf;
u8txid = - 1 ;
auto && r1 = shtc3_read();
auto && r2 = ltr308als_read();
Serial << "..shtc3 t=" << int (i16Temp) << ", h=" << int (i16Humd) << mwx:: crlf;
Serial << "..ltr308als l=" << int (u32Lumi) << mwx:: crlf;
if (r1 && r2) {
if (auto && pkt = the_twelite.network.use< NWK_SIMPLE> ().prepare_tx_packet()) { ここではE_EVENT_NEW_STATEイベントの時に、センサーデータ読み出し、無線パケットの送信手続きに入ります。送信手続きの詳細は他のアクトサンプル例を参考にしてください。
void transmit_complete (mwx:: packet_ev_tx& txev) {
Serial << "..txcomp=" << int (txev.u8CbId) << mwx:: crlf;
PEV_Process(E_ORDER_KICK, txev.u8CbId); // pass the event to state machine
// ↓ ↓ ↓ メッセージ送付
} else if (ev == E_ORDER_KICK && evarg == uint32_t (u8txid)) {
Serial << "[STATE_TX] SUCCESS TX(" << int (evarg) << ')' << mwx:: crlf;
PEV_SetState(STATE_SLEEP);
} 送信完了まちの処理はループでのアクト記述と違い、transmit_complete()からのPEV_Process()によるメッセージを待つことで完了確認としています。メッセージを受け取った時点でスリープします。スリープ処理はSTATE_SLEEPに遷移することで行っています。
if (PEV_u32Elaspsed_ms() > 100 ) {
// does not finish TX!
<< "[STATE_TX] FATAL, TX does not finish!" << mwx:: crlf << mwx:: flush;
the_twelite.reset_system();
} 最後にタイムアウト処理を行っています。万が一送信パケットの完了メッセージが戻ってこなかった場合を想定します。PEV_u32Elaspsed_ms()はその状態に遷移してからの経過時間を[ms]で返します。時間経過した場合は、上記では(このタイムアウトは余程のことだとして)システムリセットthe_twelite.reset_system()を行います。
MY_APP_CHILD::STATE_SLEEP
MWX_STATE(MY_APP_CHILD:: STATE_SLEEP, uint32_t ev, uint32_t evarg) {
if (ev == E_EVENT_NEW_STATE) {
Serial << "..sleep for 5000ms" << mwx:: crlf;
pinMode(PAL_AMB:: PIN_BTN, PIN_MODE:: WAKE_FALLING_PULLUP);
digitalWrite(PAL_AMB:: PIN_LED, PIN_STATE:: HIGH);
Serial.flush();
the_twelite.sleep(5000 ); // regular sleep
} スリープを行います。前の状態から遷移した直後のE_EVENT_NEW_STATEに記述します。スリープ直前に他のイベントが呼ばれる可能性がありますので、必ず1回だけ実行される判定式の中でthe_twelite.sleep()を実行してください。
1.4.1.12 - PAL_MAG 磁気センサーパルを使ったサンプル
アクトの機能 開閉センサーパル OPEN-CLOSE SENSE PAL を用い、磁気センサーの検出時に割り込み起床し、無線送信します。 コイン電池で動作させるための、スリープ機能を利用します。 アクトの使い方 必要なTWELITE アクトの解説 インクルード
##include <TWELITE>
##include <NWK_SIMPLE>
##include <PAL_MAG> 開閉センサーパルのボード ビヘイビア<PAL_MAG>
setup()
void setup () {
/*** SETUP section */
// use PAL_AMB board support.
auto && brd = the_twelite.board.use< PAL_MAG> ();
// now it can read DIP sw status.
= (brd.get_DIPSW_BM() & 0x07 ) + 1 ;
if (u8ID == 0 ) u8ID = 0xFE ; // 0 is to 0xFE
// LED setup (use periph_led_timer, which will re-start on wakeup() automatically)
:: BLINK, 10 ); // blink (on 10ms/ off 10ms)
// the twelite main object.
<< TWENET:: appid(APP_ID) // set application ID (identify network group)
<< TWENET:: channel(CHANNEL); // set channel (pysical channel)
// Register Network
auto && nwk = the_twelite.network.use< NWK_SIMPLE> ();
nwk << NWK_SIMPLE:: logical_id(u8ID); // set Logical ID. (0xFE means a child device with no ID)
/*** BEGIN section */
the_twelite.begin(); // start twelite!
/*** INIT message */
Serial << "--- PAL_MAG:" << FOURCHARS << " ---" << mwx:: crlf;
} 最初にボードビヘイビア<PAL_MAG>を登録します。ボードビヘイビアの初期化時にセンサーやDIOの初期化が行われます。最初に行うのは、ボードのDIP SWなどの状態を確認してから、ネットワークの設定などを行うといった処理が一般的だからです。
auto && brd = the_twelite.board.use< PAL_MAG> ();
u8ID = (brd.get_DIPSW_BM() & 0x07 ) + 1 ;
if (u8ID == 0 ) u8ID = 0xFE ; // 0 is to 0xFE
ここでは、ボード上の4ビットDIP SWのうち3ビットを読み出して子機のIDとして設定しています。0の場合は、ID無しの子機(0xFE)とします。
LEDの設定を行います。ここでは 10ms おきに ON/OFF の点滅の設定をします(スリープを行い起床時間が短いアプリケーションでは、起床中は点灯するという設定とほぼ同じ意味合いになります)。
brd.set_led(LED_TIMER:: BLINK, 10 ); // blink (on 10ms/ off 10ms)
begin()begin()関数はsetup()関数を終了し(そのあとTWENETの初期化が行われる)一番最初のloop()の直前で呼ばれます。
void begin () {
sleepNow(); // the first time is just sleeping.
setup()終了後にsleepNow()を呼び出し初回スリープを実行します。
sleepNow()
void sleepNow () {
uint32_t u32ct = 60000 ;
pinMode(PAL_MAG:: PIN_SNS_OUT1, PIN_MODE:: WAKE_FALLING);
pinMode(PAL_MAG:: PIN_SNS_OUT2, PIN_MODE:: WAKE_FALLING);
the_twelite.sleep(u32ct);
} スリープに入るまえに磁気センサーのDIOピンの割り込み設定をします。pinMode()を用います。2番めのパラメータはPIN_MODE::WAKE_FALLINGを指定しています。これはHIGHからLOWへピンの状態が変化したときに起床する設定です。
7行目でthe_twelite.sleep()でスリープを実行します。パラメータの60000は、TWELITE PAL ボードのウォッチドッグをリセットするために必要な起床設定です。リセットしないと60秒経過後にハードリセットがかかります。
wakeup()スリープから復帰し起床すると wakeup() が呼び出されます。そのあとloop() が都度呼び出されます。wakeup()の前に、UARTなどの各ペリフェラルやボード上のデバイスのウェイクアップ処理(ウォッチドッグタイマーのリセットなど)が行われます。例えばLEDの点灯制御を再始動します。
void wakeup () {
if (the_twelite.is_wokeup_by_wktimer()) {
sleepNow();
}
} ここではウェイクアップタイマーからの起床の場合(the_twelite.is_wokeup_by_wktimer())は再びスリープを実行します。これは上述のウォッチドッグタイマーのリセットを行う目的のみの起床です。
磁気センサーの検出時の起床の場合は、このままloop()処理に移行します。
loop()ここでは、検出された磁気センサーのDIOの確認を行い、パケットの送信を行い、パケット送信完了後に再びスリープを実行します。
void loop () {
if (! b_transmit) {
if (auto && pkt =
the_twelite.network.use< NWK_SIMPLE> ().prepare_tx_packet())
uint8_t b_north =
the_twelite.is_wokeup_by_dio(PAL_MAG:: PIN_SNS_NORTH);
uint8_t b_south =
the_twelite.is_wokeup_by_dio(PAL_MAG:: PIN_SNS_SOUTH);
Serial << "..sensor north=" << int (b_north)
<< " south=" << int (b_south) << mwx:: crlf;
// set tx packet behavior
<< tx_addr(0x00 )
<< tx_retry(0x1 )
<< tx_packet_delay(0 , 0 , 2 );
// prepare packet payload
, make_pair(FOURCHARS, 4 )
, b_north
, b_south
);
// do transmit
= pkt.transmit();
if (ret) {
u8txid = ret.get_value() & 0xFF ;
b_transmit = true;
}
else {
// fail to request
}
} else {
sleepNow();
}
} else {
if (the_twelite.tx_status.is_complete(u8txid)) {
b_transmit = 0 ;
sleepNow();
}
}
} b_transmit変数によってloop()内の振る舞いを制御しています。送信要求が成功した後、この値を1にセットしパケット送信完了待ちを行います。
磁気センサーの検出DIOピンの確認を行います。検出ピンは二種類あります。N極検知とS極検知です。単に磁石が近づいたことだけを知りたいならいずれかのピンの検出されたことが条件となります。
uint8_t b_north =
the_twelite.is_wokeup_by_dio(PAL_MAG:: PIN_SNS_NORTH);
uint8_t b_south =
the_twelite.is_wokeup_by_dio(PAL_MAG:: PIN_SNS_SOUTH); 起床要因のピンを確認するにはthe_twelite.is_wokeup_by_dio()を用います。パラメータはピン番号です。戻り値をuint8_tに格納しているのはパケットのペイロードに格納するためです。
通信条件の設定やペイロードにデータを格納後、送信を行います。
// do transmit
= pkt.transmit(); その後、loop() 中 b_transmit が true になっている場合は、完了チェックを行い、完了すれば sleepNow() によりスリープします。
if (the_twelite.tx_status.is_complete(u8txid)) {
b_transmit = 0 ;
sleepNow();
} 送信完了に確認は the_twelite.tx_status.is_complete(u8txid) で行っています。u8txidは送信時に戻り値として戻されたID値です。
1.4.1.13 - PAL_MOT-single 加速度センサーパルを使ったサンプル
このアクトでは、スリープ復帰後に数サンプル加速度データを取得しそのデータを送ります。
アクトの解説 起床→加速度センサーの取得開始→加速度センサーのFIFO割り込み待ち→加速度センサーのデータの取り出し→無線送信→スリープという流れになります。
加速度センサーは、FIFOキューが一杯になるとFIFOキューへのデータ追加を停止します。
宣言部 インクルード
##include <TWELITE> // MWXライブラリ基本
##include <NWK_SIMPLE> // ネットワーク
##include <SM_SIMPLE> // ステートマシン(状態遷移)
##include <STG_STD> // インタラクティブモード
/*** board selection (choose one) */
##define USE_PAL_MOT
//#define USE_CUE
// board dependend definitions.
##if defined(USE_PAL_MOT)
##define BRDN PAL_MOT
##define BRDC <PAL_MOT>
##elif defined(USE_CUE)
##define BRDN CUE
##define BRDC <CUE>
##endif
// include board support
##include BRDC MOT PALまたはTWELITE CUEに対応するため、インクルード部分はマクロになっています。USE_PAL_MOTまたは、USE_CUEのいずれかを定義します。
USE_PAL_MOT が定義されている場合は動作センサーパルのボードビヘイビア<PAL_MOT>
状態定義
enum class E_STATE : uint8_t {
INTERACTIVE = 255 ,
INIT = 0 ,
START_CAPTURE,
WAIT_CAPTURE,
REQUEST_TX,
WAIT_TX,
EXIT_NORMAL,
EXIT_FATAL
};
SM_SIMPLE< E_STATE> step; loop()中の順次処理を行うために状態を定義し、またステートマシン stepを宣言します。
センサーデータ格納
struct {
int32_t x_ave, y_ave, z_ave;
int32_t x_min, y_min, z_min;
int32_t x_max, y_max, z_max;
uint16_t n_seq;
uint8_t n_samples;
} sensor; センサーデータを格納するためのデータ構造です。
setup()
/// load board and settings objects
auto && brd = the_twelite.board.use BRDC (); // load board support
auto && set = the_twelite.settings.use< STG_STD> (); // load save/load settings(interactive mode) support
auto && nwk = the_twelite.network.use< NWK_SIMPLE> (); // load network support
ボード、設定、ネットワークの各ビヘイビアオブジェクトの登録を行います。
インタラクティブモード
// settings: configure items
<< SETTINGS:: appname("MOT" );
set << SETTINGS:: appid_default(DEFAULT_APP_ID); // set default appID
<< SETTINGS:: ch_default(DEFAULT_CHANNEL); // set default channel
<< SETTINGS:: lid_default(0x1 ); // set default LID
:: OPT_DWORD2, E_STGSTD_SETID:: OPT_DWORD3, E_STGSTD_SETID:: OPT_DWORD4, E_STGSTD_SETID:: ENC_KEY_STRING, E_STGSTD_SETID:: ENC_MODE);
// if SET=LOW is detected, start with intaractive mode.
if (digitalRead(brd.PIN_SET) == PIN_STATE:: LOW) {
set << SETTINGS:: open_at_start();
brd.set_led(LED_TIMER:: BLINK, 300 ); // slower blink
:: INTERACTIVE);
return ;
}
// load settings
// load from EEPROM.
= set.u32opt1(); // this value is not used in this example.
インタラクティブモードの初期化を行います。
まず、設定項目の調整を行います。ここでは、メニュー項目で表示されるタイトル名SETTINGS::appname、アプリケーションIDのデフォルト値の設定SETTINGS::appid_default、チャネルのデフォルトSETTINGS::ch_default、論理デバイスIDのデフォルトSETTINGS::lid_default、非表示項目の設定.hide_items()を行います。
このサンプルでは起動時にSETピンがLOである場合にインタラクティブモードに遷移します。digitalRead(brd.PIN_SET)によりピンがLOであることを確認できた場合は、SETTINGS::open_at_start()を指定します。この指定によりsetup()を抜けた後に速やかにインタラクティブモード画面が表示されます。画面が表示されてもbegin()やloop()が実行されます。このサンプルでは状態STATE::INTERACTIVEとしてloop()中ではスリープなどの動作はせず何もしないようにします。
続いて設定値を読み出します。設定値を読むには必ず.reload()を実行します。このサンプルではオプションビット設定.u32opt1()を読み出します。
the_twelite
the_tweliteは、システムの基本的な振る舞いを管理するクラスオブジェクトです。このオブジェクトは、setup()内でアプリケーションIDやチャネルなど様々な初期化を行います。
ここではインタラクティブモードの設定値の一部 を反映しています。
インタラクティブモード設定で反映した項目を別の設定に変更したい場合は、続いて上書きしたい設定を行います。
the_twelite << set;// インタラクティブモード
<< twenet:: channel(19 ); // chを19に上書き設定
NWK_SIMPLE オブジェクト
ネットワークビヘイビアオブジェクトに対しても設定を行います。インタラクティブモードの論理デバイスID(LID)と再送設定が反映されます。
その他、ハードウェアの初期化など
brd.set_led(LED_TIMER:: BLINK, 100 ); LEDのブリンク設定などを行います。
begin()
void begin () {
auto && set = the_twelite.settings.use< STG_STD> ();
if (! set.is_screen_opened()) {
// sleep immediately, waiting for the first capture.
}
} setup()を終了した後に呼ばれます。ここでは初回スリープを実行しています。ただしインタラクティブモードの画面が表示される場合はスリープしません。
wakeup()
void wakeup () {
Serial << crlf << "--- PAL_MOT(OneShot):"
<< FOURCHARS << " wake up ---" << crlf;
eState = E_STATE:: INIT;
} 起床後は状態変数eStateを初期状態INITにセットしています。この後loop()が実行されます。
loop()
void loop () {
auto && brd = the_twelite.board.use< PAL_MOT> ();
do {
switch (step.state()) {
case STATE:: INTERACTIVE:
break ;
...
} while (step.b_more_loop());
} loop() の基本構造は<SM_STATE>ステートマシンstateを用い_switch … case_節での制御です。初期状態はSTATE::INITまたはSTATE::INTERACTIVEです。
STATE::INTERACTIVEインタラクティブモード画面が表示されているときの状態です。何もしません。この画面ではSerialの入出力はインタラクティブモードが利用します。
STATE::INIT初期状態のINITです。
case STATE:: INIT:
brd.sns_MC3630.get_que().clear(); // clear queue in advance (just in case).
& sensor, 0 , sizeof (sensor)); // clear sensor data
:: START_CAPTURE);
break ; 状態INITでは、初期化(結果格納用のキューのクリア)や結果格納用のデータ構造の初期化を行います。STATE::START_CAPTUREに遷移します。この遷移設定後、もう一度_while_ループが実行されます。
STATE::CAPTURE
case STATE:: START_CAPTURE:
brd.sns_MC3630.begin(
// 400Hz, +/-4G range, get four samples and will average them.
:: Settings(
SnsMC3630:: MODE_LP_400HZ, SnsMC3630:: RANGE_PLUS_MINUS_4G, N_SAMPLES));
step.set_timeout(100 );
step.next(STATE:: WAIT_CAPTURE);
break ; 状態START_CAPTUREでは、MC3630センサーのFIFO取得を開始します。ここでは400Hzで4サンプル取得できた時点でFIFO割り込みが発生する設定にしています。
例外処理のためのタイムアウトの設定と、次の状態STATE::WAIT_CAPTUREに遷移します。
STATE::WAIT_CAPTURE
case STATE:: WAIT_CAPTURE:
if (brd.sns_MC3630.available()) {
brd.sns_MC3630.end(); // stop now!
状態WAIT_CAPTUREでは、FIFO割り込みを待ちます。割り込みが発生し結果格納用のキューにデータが格納されるとsns_MC3630.available()がtrueになります。sns_MC3630.end()を呼び出し処理を終了します。
sensor.n_samples = brd.sns_MC3630.get_que().size();
if (sensor.n_samples) sensor.n_seq = brd.sns_MC3630.get_que()[0 ].get_t();
... サンプル数とサンプルのシーケンス番号を取得します。
// get all samples and average them.
for (auto && v: brd.sns_MC3630.get_que()) {
sensor.x_ave += v.x;
sensor.y_ave += v.y;
sensor.z_ave += v.z;
}
if (sensor.n_samples == N_SAMPLES) {
// if N_SAMPLES == 2^n, division is much faster.
/= N_SAMPLES;
sensor.y_ave /= N_SAMPLES;
sensor.z_ave /= N_SAMPLES;
}
... すべてのサンプルデータに対して読み出し、平均値をとる処理をします。
// can also be:
// int32_t x_max = -999999, x_min = 999999;
// for (auto&& v: brd.sns_MC3630.get_que()) {
// if (v.x >= x_max) x_max = v.x;
// if (v.y <= x_min) x_min = v.x;
// ...
// }
auto && x_minmax = std:: minmax_element(
get_axis_x_iter(brd.sns_MC3630.get_que().begin()),
get_axis_x_iter(brd.sns_MC3630.get_que().end()));
sensor.x_min = * x_minmax.first;
sensor.x_max = * x_minmax.second;
... ここでは取得されたサンプルに対して、各軸に対応するイテレータを用い最大・最小を得ています。
C++ Standard Template Library のアルゴリズムを使用する例としてstd::mimmax_element紹介していますが、コメント内のようにforループ内で最大、最小を求めても構いません。
if (brd.sns_MC3630.available()) {
...
brd.sns_MC3630.get_que().clear(); // clean up the queue
:: REQUEST_TX); // next state
else if (step.is_timeout()) {
Serial << crlf << "!!!FATAL: SENSOR CAPTURE TIMEOUT." ;
step.next(STATE:: EXIT_FATAL);
}
break ; .sns_MC3630.get_que().clear()を呼び出し、キューにあるデータをクリアします。これを呼び出さないと続くサンプル取得ができません。その後STATE::REQUEST_TX状態に遷移します。
.is_timeout()はタイムアウトをチェックします。タイムアウト時は異常としてSTATE::EXIT_FATALに遷移します。
STATE::REQUEST_TX
case STATE:: REQUEST_TX:
if (TxReq()) {
step.set_timeout(100 );
step.clear_flag();
step.next(STATE:: WAIT_TX);
} else {
Serial << crlf << "!!!FATAL: TX REQUEST FAILS." ;
step.next(STATE:: EXIT_FATAL);
}
break ; 状態REQUEST_TXではローカル定義関数TxReq()を呼び出し、得られたセンサーデータの処理と送信パケットの生成・送信を行います。送信要求は送信キューの状態などで失敗することがあります。送信要求が成功した場合、TxReq()はtrueとして戻りますが、まだ送信は行われません。送信完了はon_tx_comp()コールバックが呼び出されます。
また.clear_flag()により送信完了を知らせるためのフラグをクリアしておきます。同時にタイムアウトも設定します。
E_STATE::WAIT_TX
case STATE:: WAIT_TX:
if (step.is_flag_ready()) {
step.next(STATE:: EXIT_NORMAL);
}
if (step.is_timeout()) {
Serial << crlf << "!!!FATAL: TX TIMEOUT." ;
step.next(STATE:: EXIT_FATAL);
}
break ; 状態STATE::WAIT_TXでは、無線パケットの送信完了を待ちます。フラグはon_tx_comp()コールバック関数でセットされ、セット後に.is_flag_ready()が_true_になります。
E_STATE::EXIT_NORMAL, E_STATE::EXIT_FATAL
case STATE:: EXIT_NORMAL:
sleepNow();
break ;
case STATE:: EXIT_FATAL:
Serial << flush;
the_twelite.reset_system();
break ; 一連の動作が完了したときは状態STATE::EXIT_NORMALに遷移しローカル定義の関数sleepNow()を呼び出しスリープを実行します。またエラーを検出した場合は状態STATE::EXIT_FATALに遷移し、システムリセットを行います。
MWX_APIRET TxReq()
MWX_APIRET TxReq () {
auto && brd = the_twelite.board.use< PAL_MOT> ();
MWX_APIRET ret = false;
// prepare tx packet
if (auto && pkt = the_twelite.network.use< NWK_SIMPLE> ().prepare_tx_packet()) {
// set tx packet behavior
<< tx_addr(0x00 ) // 0..0xFF (LID 0:parent, FE:child w/ no id, FF:LID broad cast), 0x8XXXXXXX (long address)
<< tx_retry(0x1 ) // set retry (0x1 send two times in total)
<< tx_packet_delay(0 , 0 , 2 ); // send packet w/ delay
// prepare packet (first)
// set payload data objects.
4 ) // just to see packet identification, you can design in any.
uint16_t (sensor.n_seq)
, uint8_t (sensor.n_samples)
, uint16_t (sensor.x_ave)
, uint16_t (sensor.y_ave)
, uint16_t (sensor.z_ave)
, uint16_t (sensor.x_min)
, uint16_t (sensor.y_min)
, uint16_t (sensor.z_min)
, uint16_t (sensor.x_max)
, uint16_t (sensor.y_max)
, uint16_t (sensor.z_max)
);
// perform transmit
= pkt.transmit();
if (ret) {
Serial << "..txreq(" << int (ret.get_value()) << ')' ;
}
}
return ret;
} 最期にパケットの生成と送信を要求を行います。パケットには続き番号、サンプル数、XYZの平均値、XYZの最小サンプル値、XYZの最大サンプル値を含めます。
sleepNow()
void sleepNow () {
Serial << crlf << "..sleeping now.." << crlf;
Serial.flush();
step.on_sleep(false); // reset state machine.
3000 , false); // set longer sleep (PAL must wakeup less than 60sec.)
スリープの手続きです。
シリアルポートはスリープ前にSerial.flush()を呼び出してすべて出力しておきます。 <SM_SIMPLE>ステートマシンはon_sleep()を行う必要があります。1.4.1.14 - PAL_MOT-fifo 加速度センサーパルを使ったサンプル
アクトの機能 動作センサーパル MOTION SENSE PAL を用い、加速度センサーの加速度を連続的に計測し、無線送信します。 コイン電池で動作させるための、スリープ機能を利用します。 アクトの使い方 必要なTWELITE アクトの解説 インクルード
##include <TWELITE>
##include <NWK_SIMPLE>
##include <PAL_MOT> 動作センサーパルのボードビヘイビア<PAL_MOT>
setup()
void setup () {
/*** SETUP section */
// board
auto && brd = the_twelite.board.use< PAL_MOT> ();
brd.set_led(LED_TIMER:: BLINK, 100 );
// the twelite main class
<< TWENET:: appid(APP_ID)
<< TWENET:: channel(CHANNEL);
// Register Network
auto && nwk = the_twelite.network.use< NWK_SIMPLE> ();
nwk << NWK_SIMPLE:: logical_id(0xFE );
/*** BEGIN section */
the_twelite.begin(); // start twelite!
:: Settings(
SnsMC3630:: MODE_LP_14HZ, SnsMC3630:: RANGE_PLUS_MINUS_4G));
/*** INIT message */
Serial << "--- PAL_MOT(Cont):" << FOURCHARS
<< " ---" << mwx:: crlf;
} 最初にボードビヘイビア<PAL_MOT>を登録します。ボードビヘイビアの初期化時にセンサーやDIOの初期化が行われます。最初に行うのは、ボードのDIP SWなどの状態を確認してから、ネットワークの設定などを行うといった処理が一般的だからです。
auto && brd = the_twelite.board.use< PAL_MOT> ();
u8ID = (brd.get_DIPSW_BM() & 0x07 ) + 1 ;
if (u8ID == 0 ) u8ID = 0xFE ; // 0 is to 0xFE
ここでは、ボード上の4ビットDIP SWのうち3ビットを読み出して子機のIDとして設定しています。0の場合は、ID無しの子機(0xFE)とします。
LEDの設定を行います。ここでは 10ms おきに ON/OFF の点滅の設定をします(スリープを行い起床時間が短いアプリケーションでは、起床中は点灯するという設定とほぼ同じ意味合いになります)。
brd.set_led(LED_TIMER:: BLINK, 10 ); // blink (on 10ms/ off 10ms)
加速度センサーの初期化
brd.sns_MC3630.begin(SnsMC3630:: Settings(
SnsMC3630:: MODE_LP_14HZ, SnsMC3630:: RANGE_PLUS_MINUS_4G)); 加速度センサーの計測を開始します。加速度センサーの設定(SnsMC3630::Settings)には計測周波数と測定レンジを指定します。ここでは14HZの計測(SnsMC3630::MODE_LP_14HZ)で、±4Gのレンジ(SnsMC3630::RANGE_PLUS_MINUS_4G)で計測します。
開始後は加速度センサーの計測が秒14回行われ、その値はセンサー内部のFIFOキューに保存されます。センサーに28回分の計測が終わった時点で通知されます。
begin()begin()関数はsetup()関数を終了し(そのあとTWENETの初期化が行われる)一番最初のloop()の直前で呼ばれます。
void begin () {
sleepNow(); // the first time is just sleeping.
setup()終了後にsleepNow()を呼び出し初回スリープを実行します。
sleepNow()
void sleepNow () {
pinMode(PAL_MOT:: PIN_SNS_INT, WAKE_FALLING);
the_twelite.sleep(60000 , false);
} スリープに入るまえに加速度センサーのDIOピンの割り込み設定をします。FIFOキューが一定数まで到達したときに発生する割り込みです。pinMode()を用います。2番めのパラメータはPIN_MODE::WAKE_FALLINGを指定しています。これはHIGHからLOWへピンの状態が変化したときに起床する設定です。
3行目でthe_twelite.sleep()でスリープを実行します。パラメータの60000は、TWELITE PAL ボードのウォッチドッグをリセットするために必要な起床設定です。リセットしないと60秒経過後にハードリセットがかかります。
wakeup()加速度センサーのFIFO割り込みにより、スリープから復帰し起床すると wakeup() が呼び出されます。そのあとloop() が都度呼び出されます。wakeup()の前に、UARTなどの各ペリフェラルやボード上のデバイスのウェイクアップ処理(ウォッチドッグタイマーのリセットなど)が行われます。例えばLEDの点灯制御を再始動します。
void wakeup () {
Serial << "--- PAL_MOT(Cont):" << FOURCHARS
<< " wake up ---" << mwx:: crlf;
b_transmit = false;
txid[0 ] = 0xFFFF ;
txid[1 ] = 0xFFFF ;
} ここではloop()で使用する変数の初期化を行っています。
loop()ここでは、加速度センサー内のFIFOキューに格納された加速度情報を取り出し、これをもとにパケット送信を行います。パケット送信完了後に再びスリープを実行します。
void loop () {
auto && brd = the_twelite.board.use< PAL_MOT> ();
if (! b_transmit) {
if (! brd.sns_MC3630.available()) {
Serial << "..sensor is not available."
<< mwx:: crlf << mwx:: flush;
sleepNow();
}
// send a packet
<< "..finish sensor capture." << mwx:: crlf
<< " seq=" << int (brd.sns_MC3630.get_que().back().t)
<< "/ct=" << int (brd.sns_MC3630.get_que().size());
// calc average in the queue.
int32_t x = 0 , y = 0 , z = 0 ;
for (auto && v: brd.sns_MC3630.get_que()) {
x += v.x;
y += v.y;
z += v.z;
}
x /= brd.sns_MC3630.get_que().size();
y /= brd.sns_MC3630.get_que().size();
z /= brd.sns_MC3630.get_que().size();
Serial << format("/ave=%d,%d,%d" , x, y, z) << mwx:: crlf;
}
for (int ip = 0 ; ip < 2 ; ip++ ) {
if (auto && pkt =
the_twelite.network.use< NWK_SIMPLE> ().prepare_tx_packet())
// set tx packet behavior
<< tx_addr(0x00 )
<< tx_retry(0x1 )
<< tx_packet_delay(0 , 0 , 2 );
// prepare packet (first)
uint8_t siz = (brd.sns_MC3630.get_que().size() >= MAX_SAMP_IN_PKT)
? MAX_SAMP_IN_PKT : brd.sns_MC3630.get_que().size();
uint16_t seq = brd.sns_MC3630.get_que().front().t;
pack_bytes(pkt.get_payload()
, make_pair(FOURCHARS, 4 )
, seq
, siz
);
// store sensor data (36bits into 5byts, alas 4bits are not used...)
for (int i = 0 ; i < siz; i++ ) {
auto && v = brd.sns_MC3630.get_que().front();
uint32_t v1;
v1 = ((uint16_t (v.x/ 2 ) & 4095 ) << 20 ) // X:12bits
| ((uint16_t (v.y/ 2 ) & 4095 ) << 8 ) // Y:12bits
| ((uint16_t (v.z/ 2 ) & 4095 ) >> 4 ); // Z:8bits from MSB
uint8_t v2 = (uint16_t (v.z/ 2 ) & 255 ); // Z:4bits from LSB
// add into pacekt entry.
// pop an entry from queue.
// perform transmit
= pkt.transmit();
if (ret) {
Serial << "..txreq(" << int (ret.get_value()) << ')' ;
txid[ip] = ret.get_value() & 0xFF ;
} else {
sleepNow();
}
}
}
// finished tx request
= true;
} else {
if ( the_twelite.tx_status.is_complete(txid[0 ])
&& the_twelite.tx_status.is_complete(txid[1 ]) ) {
sleepNow();
}
}
} b_transmit変数によってloop()内の振る舞いを制御しています。送信要求が成功した後、この値を1にセットしパケット送信完了待ちを行います。
最初にセンサーがavailableかどうかを確認します。割り込み起床後であるため、availableでないのは通常ではなく、そのままスリープします。
if (! brd.sns_MC3630.available()) {
Serial << "..sensor is not available."
<< mwx:: crlf << mwx:: flush;
sleepNow();
} 無線送信パケットでは使用しないのですが、取り出した加速度の情報を確認してみます。
Serial << "..finish sensor capture." << mwx:: crlf
<< " seq=" << int (brd.sns_MC3630.get_que().front().t)
<< "/ct=" << int (brd.sns_MC3630.get_que().size());
// calc average in the queue.
int32_t x = 0 , y = 0 , z = 0 ;
for (auto && v: brd.sns_MC3630.get_que()) {
x += v.x;
y += v.y;
z += v.z;
}
x /= brd.sns_MC3630.get_que().size();
y /= brd.sns_MC3630.get_que().size();
z /= brd.sns_MC3630.get_que().size();
Serial << format("/ave=%d,%d,%d" , x, y, z) << mwx:: crlf;
} 加速度センサーの計測結果はbrd.sns_MC3630.get_que()で得られるFIFOキューに格納されます。
加速度センサーの計測結果を格納している構造体 axis_xyzt は x, y, z の三軸の情報に加え、続き番号 t が格納されています。
格納されているサンプル数はキューのサイズ(brd.sns_MC3630.get_que().size())を読み出すことで確認できます。通常は28サンプルですが処理の遅延等によりもう少し進む場合もあります。最初のサンプルはfront()で取得することができます。その続き番号はfront().tになります。
ここでは、サンプルをキューから取り出す前にサンプルの平均をとってみます。キューの各要素にはfor文(for (auto&& v: brd.sns_MC3630.get_que()) { ... }) でアクセスできます。for文内の v.x, v.y, v.z が各要素になります。ここでは各要素の合計を計算しています。for文終了後は要素数で割ることで平均を計算しています。
次にパケットを生成して送信要求を行いますが、データ量が大きいため2回に分けて送信します。そのため送信処理がfor文で2回行われます。
for (int ip = 0 ; ip < 2 ; ip++ ) { 送信するパケットに含めるサンプル数とサンプル最初の続き番号をパケットのペイロードの先頭部分に格納します。
// prepare packet (first)
uint8_t siz = (brd.sns_MC3630.get_que().size() >= MAX_SAMP_IN_PKT)
? MAX_SAMP_IN_PKT : brd.sns_MC3630.get_que().size();
uint16_t seq = brd.sns_MC3630.get_que().front().t;
pack_bytes(pkt.get_payload()
, make_pair(FOURCHARS, 4 )
, seq
, siz
); 最後に加速度データを格納します。先程は平均値の計算のためにキューの各要素を参照のみしましたが、ここではキューから1サンプルずつ読み出してパケットのペイロードに格納します。
for (int i = 0 ; i < siz; i++ ) {
auto && v = brd.sns_MC3630.get_que().front();
uint32_t v1;
v1 = ((uint16_t (v.x/ 2 ) & 4095 ) << 20 ) // X:12bits
| ((uint16_t (v.y/ 2 ) & 4095 ) << 8 ) // Y:12bits
| ((uint16_t (v.z/ 2 ) & 4095 ) >> 4 ); // Z:8bits from MSB
uint8_t v2 = (uint16_t (v.z/ 2 ) & 255 ); // Z:4bits from LSB
// add into pacekt entry.
// pop an entry from queue.
加速度センサーからのデータキューの先頭を読み出すのは.front()を用います。読みだした後.pop()を用いて先頭キューを開放します。
加速度センサーから取得されるデータは1Gを1000としたミリGの単位です。レンジを±4Gとしているため、12bitの範囲に入るように2で割って格納します。データ数を節約するため最初の4バイトにX,Y軸とZ軸の上位8bitを格納し、次の1バイトにZ軸の下位4bitの合計5バイトを生成します。
2回分の送信待ちを行うため送信IDはtxid[]配列に格納します。
MWX_APIRET ret = pkt.transmit();
if (ret) {
Serial << "..txreq(" << int (ret.get_value()) << ')' ;
txid[ip] = ret.get_value() & 0xFF ;
} else {
sleepNow();
} その後、loop() 中 b_transmit が trueになっている場合は、完了チェックを行い、完了すれば sleepNow() によりスリープします。
} else {
if ( the_twelite.tx_status.is_complete(txid[0 ])
&& the_twelite.tx_status.is_complete(txid[1 ]) ) {
sleepNow();
}
} 送信完了に確認は the_twelite.tx_status.is_complete() で行っています。txid[]は送信時に戻り値として戻されたID値です。
1.4.1.15 - PulseCounter パルスカウンターを使ったサンプル
パルスカウンターは、マイコンを介在せず信号の立ち上がりまたは立ち下りの回数を計数するものです。不定期のパルスを計数し一定回数までカウントが進んだ時点で無線パケットで回数を送信するといった使用方法が考えられます。
アクトの機能 子機側のDIO8に接続したパルスを計数し、一定時間経過後または一定数のカウントを検出した時点で無線送信する。 子機側はスリープしながら動作する。 アクトの使い方 必要なTWELITE アクトの解説 setup()
// Pulse Counter setup
パルスカウンターの初期化を行います。
begin()
void begin () {
// start the pulse counter capturing
100 // 100 count to wakeup
:: FALLING // falling edge
sleepNow();
} パルスカウンターの動作を開始し、初回スリープを実行します。PulseCounter.begin()の最初のパラメータは、起床割り込みを発生させるためのカウント数100で、2番目は立ち下がり検出PIN_INT_MODE::FALLINGを指定しています。
wakeup()
void wakeup () {
Serial << mwx:: crlf
<< "--- Pulse Counter:" << FOURCHARS << " wake up ---"
<< mwx:: crlf;
if (! PulseCounter.available()) {
Serial << "..pulse counter does not reach the reference value." << mwx:: crlf;
sleepNow();
}
} 起床時にPulseCounter.available()を確認しています。availableつまりtrueになっていると、指定したカウント数以上のカウントになっていることを示します。ここではfalseの場合再スリープしています。
カウント数が指定以上の場合はloop()で送信処理と送信完了待ちを行います。
loop()
uint16_t u16ct = PulseCounter.read(); パルスカウント値の読み出しを行います。読み出した後カウンタはリセットされます。
1.4.1.16 - WirelessUART シリアル通信を行います。
WirelessUARTはシリアル通信を行います。
アクトの機能 2台のUART接続の TWELITE 同士をアスキー書式で通信する。 アクトの使い方 必要なTWELITE PCにシリアル接続されている以下のデバイスを2台使います。
アクトの解説 setup()
void setup () {
auto && set = the_twelite.settings.use< STG_STD> ();
auto && nwk = the_twelite.network.use< NWK_SIMPLE> ();
/*** INTERACTIE MODE */
// settings: configure items
<< SETTINGS:: appname("WirelessUART" );
set << SETTINGS:: appid_default(DEFAULT_APP_ID); // set default appID
<< SETTINGS:: ch_default(DEFAULT_CHANNEL); // set default channel
<< SETTINGS:: lid_default(DEFAULT_LID); // set default lid
:: OPT_DWORD2, E_STGSTD_SETID:: OPT_DWORD3, E_STGSTD_SETID:: OPT_DWORD4, E_STGSTD_SETID:: ENC_KEY_STRING, E_STGSTD_SETID:: ENC_MODE);
set.reload(); // load from EEPROM.
/*** SETUP section */
// the twelite main class
<< set // from iteractive mode (APPID/CH/POWER)
<< TWENET:: rx_when_idle(); // open receive circuit (if not set, it can't listen packts from others)
// Register Network
<< set; // from interactive mode (LID/REPEAT)
/*** BEGIN section */
SerialParser.begin(PARSER:: ASCII, 128 ); // Initialize the serial parser
// start twelite!
/*** INIT message */
Serial << "--- WirelessUart (id=" << int (nwk.get_config().u8Lid) << ") ---" << mwx:: crlf;
} インタラクティブモードを初期化しています。このサンプルでは互いに論理デバイスID(LID)が異なるデバイスを2台以上用意します。
SerialParser.begin(PARSER:: ASCII, 128 ); シリアルパーサー を初期化します。
loop()
while (Serial.available()) {
if (SerialParser.parse(Serial.read())) {
Serial << ".." << SerialParser;
const uint8_t * b = SerialParser.get_buf().begin();
uint8_t addr = * b; ++ b; // the first byte is destination address.
}
} シリアルからのデータ入力があった時点で、シリアルパーサーに1バイト入力します。アスキー形式が最後まで受け付けられた時点でSerialParser.parse()はtrueを戻します。
SerialParserは内部バッファに対してsmplbufでアクセスできます。上の例ではバッファの1バイト目を送信先のアドレスとして取り出し、2バイト目から末尾までをtransmit()関数に渡します。
on_rx_packet()パケットを受信したときには、送信元を先頭バイトにし続くペイロードを格納したバッファsmplbuf_u8<128> bufを生成し、出力用のシリアルパーサーserparser_attach poutからシリアルに出力しています。
void on_rx_packet (packet_rx& rx, bool_t & handled) {
// check the packet header.
const uint8_t * p = rx.get_payload().begin();
if (rx.get_length() > 4 && ! strncmp((const char * )p, (const char * )FOURCHARS, 4 )) {
Serial << format("..rx from %08x/%d" , rx.get_addr_src_long(), rx.get_addr_src_lid()) << mwx:: crlf;
smplbuf_u8< 128 > buf;
mwx:: pack_bytes(buf
, uint8_t (rx.get_addr_src_lid()) // src addr (LID)
+ 4 , rx.get_payload().end()) ); // data body
serparser_attach pout;
pout.begin(PARSER:: ASCII, buf.begin(), buf.size(), buf.size());
Serial << pout;
}
} テスト用のコマンド
テストデータは必ずペースト機能 を用いてターミナルに入力してください。入力にはタイムアウトがあるためです。
参考: TWE ProgrammerやTeraTermでのペーストはAlt+Vを用います。
入力の末尾にCR LFが必要です。
最初はCR LFが省略できるXで終わる系列を試してください。終端文字列が入力されない場合は、その系列は無視されます。
例
:FE00112233X
:FE001122339C
任意の子機宛に00112233を送付します。
例
:03AABBCC00112233X
:03AABBCC0011223366
子機3番に対してAABBCC00112233を送付します。
例
:FF00112233X
:00112233X
任意の親機または子機宛(0xFF)、親機宛(0x00)に送付します。
1.4.1.17 - ユニバーサル レシーバー 様々なパケットを受信します
MWXライブラリの twe_twelite.network に NWK_LAYERED、 twe_twelite.network2 に NWK_SIMPLEを動作させることで、レイヤーツリーネット (TWELITE PAL, ARIAなど)のパケットを含む、さまざまな種類のパケットを受信、解釈できます。
ただし無線パケットは、同一チャネルであることと、同一アプリケーションIDであることが条件です。
main.cppsetup(), loop()、受信パケットのコールバック関数 on_rx_packet()を記述しています。
setup()これらのオブジェクトは pkt_handler.cpp で宣言され setup()中でpnew()により初期化されます。主にパケットのペイロード(データ)を解釈します。
mwx:: pnew(g_pkt_pal);
mwx:: pnew(g_pkt_apptwelite);
mwx:: pnew(g_pkt_actsamples);
mwx:: pnew(g_pkt_unknown); 2つのネットワークオブジェクトを生成しています。必ず the_twelite.networkにNWK_LAYEREDにします。
auto && nwk_ly = the_twelite.network.use< NWK_LAYERED> ();
auto && nwk_sm = the_twelite.network2.use< NWK_SIMPLE> (); loop()このサンプルではloop()の処理で重要なのは約1秒おきに行っている .refresh() 処理です。g_pkt_apptwelite().refresh()のみ重複チェッカのタイムアウト処理を行っています。それ以外のオブジェクトは何もしません。
if (TickTimer.available()) {
static unsigned t;
if (! (++ t & 0x3FF )) {
g_pkt_pal.refresh();
g_pkt_apptwelite.refresh();
g_pkt_actsamples.refresh();
g_pkt_unknown.refresh();
}
} on_rx_packet()
void on_rx_packet (packet_rx& rx, bool_t & handled) {
auto type = rx.get_network_type();
bool b_handled = false;
// PAL
if (! b_handled
&& type == mwx:: NETWORK:: LAYERED
&& g_pkt_pal.analyze(rx, b_handled)
) {
g_pkt_pal.display(rx);
}
// Act samples
if (! b_handled
&& type == mwx:: NETWORK:: SIMPLE
&& g_pkt_actsamples.analyze(rx, b_handled)
) {
g_pkt_actsamples.display(rx);
}
// Standard application (e.g. App_Twelite)
if (! b_handled
&& type == mwx:: NETWORK:: NONE
&& g_pkt_apptwelite.analyze(rx, b_handled)
) {
g_pkt_apptwelite.display(rx);
}
// unknown
if (! b_handled) {
g_pkt_unknown.analyze(rx, b_handled);
g_pkt_unknown.display(rx);
}
} このサンプルコードで最も重要な部分です。auto type = rx.get_network_type();によりパケットの種別を判定しています。
mwx::NETWORK::LAYERED : NWK_LAYERED レイヤーツリーネットのケットmwx::NETWORK::SIMPLE : NWK_SIMPLEのパケットmwx::NETWORK::NONE : ネットワークなし(App_Tweliteなど)その他 : エラーまたは未対応のパケット mwx::NETWORK::NONE の場合は、再送などで複数送信されうる同一パケットの重複チェッカ等の処理は MWX ライブラリ内部で行われません。これらの対応を記述する必要があります。本サンプルでは dup_checker.hpp, dup_checker.cpp を用意しています。
パケットの解釈はtsRxDataApp*をラップした packet_rx& オブジェクトを参照します。packet_rxクラス自体は特別な機能はなく、get_psRxDataApp()を用いてtsRxDataApp*から得られる一部の情報へのアクセス手段を定義しているのみです。
pkt_common.hppパケット解釈部分のインタフェースを統一する目的で定義しています。
template < class D >
struct pkt_handler {
D& self() { return static_cast < D&> (* this ); }
bool analyze (packet_rx& rx, bool & b_handled) {
return self().pkt.analyze(rx, b_handled);
}
void display (packet_rx& rx) {
Serial
<< crlf
<< format("!PKT_%s(%03d-%08x/S=%d/L=%03d/V=%04d)"
, self().get_label_packet_type()
, self().pkt.data.u8addr_src
, self().pkt.data.u32addr_src
, rx.get_psRxDataApp()-> u8Seq
, rx.get_lqi()
, self().pkt.data.u16volt
);
self().disp_detail(rx);
}
void refresh () {
self()._refresh();
}
};
// packet analyzer for App_Twelite
class pkt_handler_apptwelite : public pkt_handler< pkt_handler_apptwelite> {
friend class pkt_handler < pkt_handler_apptwelite> ;
pkt_apptwelite pkt;
void disp_detail (packet_rx& rx);
const char * get_label_packet_type () { return "AppTwelite" ; }
void _refresh () { pkt.refresh(); }
public :
pkt_handler_apptwelite() : pkt() {}
}; analyze() : パケットのペイロードを解釈する。display() : パケット情報を表示する。refresh() : 1秒おきの処理を記述します。self() : 派生クラスDにキャストします。さらにパケット解釈クラス(上記例 pkt_handler_apptwelite)には、メンバーオブジェクトの pkt が含まれます。実際のパケットの解釈部分は、pkt_???.cpp にある各々の analyze() の実装を参照してください。
pkt_???.hpp, pkt_???.cppパケット種別ごとのパケット解釈部 analyze() と、データ構造 data が定義されています。メンバーdataは、構造体ですがPktDataCommonの共通構造体を継承しています。この共通部を用いてパケットのデータのシリアル出力のコードを簡潔に記述しています。
pkt_palPAL関連のパケットに対応します。PALのパケット構造は複雑なデータ構造を持っています。ここでは EASTL のコンテナを用いた実装を行っています。
_vect_pal_sensors : _pal_sensorオブジェクトのプール。このオブジェクトは instusive map で使用するための専用クラスです。_map_pal_sensors : センサーデータを効率よく検索するための intrusive map 構造。1パケット中の複数データに対して各々が追加されるたびに_vect_pal_sensors にエントリを確保して値を格納します。パケット中のすべてのデータを解釈した時点でセンサータイプをキーとした_map_pal_sensorsを構築します。
dup_checker重複チェッカーを実装します。チェッカーの動作はテンプレート引数によってカスタマイズできます。
テンプレート引数 MODE : MODE_REJECT_SAME_SEQを指定すると、同じシーケンス番号のパケットを除外します。パケット順が並び変わるような場合に使用します。MODE_REJECT_OLDER_SEQはより新しい番号を採用します。TIMEOUT_ms : 重複データベースの初期化を行う間隔です。1000と指定すると1秒経過したデータは抹消されます。直前では除外されていたパケットも、重複データベースの初期化されると再び採用されることになります。N_ENTRIES : データ構造に最大確保される要素数です。N_BUCKET_HASH : ハッシュ値の最大数です。素数を指定します。受信される無線ノードの種類をもとに決めます。コンテナ _mmap_entries : intrusive ハッシュ マルチ マップ構造です。検索キーは無線ノードのシリアル番号です。_vect_pool : マップ構造で用いられる要素を固定数(N_ENTRIES)を確保します。_ring_vecant_idx : _mmap_entries に利用されていない_vect_pool の要素を配列インデックス番号で管理します。リングバッファの構造で、要素を追加するときはリングバッファから値を一つ取り出し、削除するときはリングバッファに値を返します。重複チェック
bool check_dup (uint32_t u32ser, uint16_t u16val, uint32_t u32_timestamp) {
// find entry by key:u32ser.
auto r = _mmap_entries.equal_range(u32ser);
...
} マルチマップ構造からデータを検索するには .equal_range() を呼び出します。得られた r はイテレータで、同一のシリアル番号の要素を列挙します。
各要素(_dup_checker_entry)にはタイムスタンプやシーケンス番号が記録されています。この値に従い重複を確認します。
1.4.1.18 - Unit_??? 単機能の動作確認サンプル
Unit_ で始まるアクト(act)は、ごく単機能の記述や動作を確認するためのものです。
名前 内容 Unit_ADCADCを動作させるサンプルです。100msごとにADCを連続実行しつつ約1秒おきに読み出し表示します。[s]キーでスリープします。 Unit_I2CprobeI2Cバスをスキャンして、応答のあるデバイス番号を表示します(この手順で応答しないデバイスもあります)。 Unit_delayMicorosecondsdelayMicroseconds()Unit_brd_CUETWELITE CUE の加速度センサー,磁気センサー,LEDの動作確認を行います。ターミナルから[a],[s],[l]キーを入力します。Unit_brd_ARIATWELITE ARIAの温湿度センサー、磁気センサー、LEDの動作確認を行います。ターミナルから[t],[s],[l]キーを入力します。 Unit_brd_PAL_NOTICE通知パル(NOTICE PAL)のLED点灯 を試します。起動時に全灯フラッシュ、その後はシリアル入力で操作します。r,g,b,w : 各色の点灯モードをトグルするR,G,B,W : 各色の明るさを変更する(消灯・全灯時は無効)c: 周期を変化させる(点滅時)C: 点滅時のデューティを変化させる(点滅時)Unit_div10010,100,1000の割り算と商を求めるdiv10(),div100(),div1000()/,%による除算との経過時間の比較をします。 Unit_div_formatdiv10(),div100(),div1000()Unit_UART1UART1 (Serial1 Unit_Pkt_Parserパケット情報のパーサーpktparserApp_Wingsとして他方でその出力を解釈したいような場合です。他方をTWELITE無線モジュール以外に接続したい場合は他のプラットフォーム を参照ください。 Unit_EEPROMEEPROMの読み書きテストコードです。 Unit_Cue_MagBuzTWELITE CUEの磁石センサーとSETピン(圧電ブザーを接続)を用いた、磁石を離すとブザーが鳴るプログラムです。 Unit_doint-bhvIO割り込みを処理するビヘイビア記述例です。 Unit_EASTLEASTL ライブラリを用いた断片コード集です。
1.5 - MWSDK改版履歴 TWELITE STAGE SDK の MWSDK 改版履歴
TWELITE STAGE SDK は、TWELITE STAGE アプリと、MWSDK ライブラリのパッケージになっています。TWELITE STAGE アプリは MWSDK ライブラリ内のビルド等の実施するフロントエンドですが、改定等については
TWELITE STAGE アプリ を参照してください。
MWSDKライブラリ 改訂履歴 各ライブラリの主要な修正箇所を記載しています。
以下の個別ライブラリについても参照ください。
バージョン名 MWSDKのバージョン名はリリース年と月を含めた MWSDK{YYYY}_{MM} となっています。UNOFFICIAL が付くものは、リリースのための包括的な検証作業を省略した適宜版となります。
TWELITE STAGE SDK がリリースされる場合は、原則として MWSTAGE{YYYY}_{MM} という命名になり、添付の MWSDK は MWSDK{YYYY}_{MM} と同じバージョン名になります。また、TWELITE STAGE SDK には過去主要 MWSDK バージョンを含めており、[TWELITE STAGE アプリでiniファイルの書き換え]({{ [}})により、有効にすることができます。]
MWSDK2025_08 (2025-08-08) TWELITE STICK リリースに伴い整備した。
Wks_TweApps
TWELITE Apps を追加した App_Twelite, App_UART, App_IO, App_Wings の MULTINONE(TWELITE Apps)対応を実施した App_OTA を追加した (TWELITE Apps 組み込み用 CUE/ARIA OTA 設定アプリ) TWELITE GOLD向け諸対応を実施した App_Wings の TWELITE STICK 対応を実施した TWELITE Apps 対応アプリでは、インタラクティブモードのメッセージを日・英選択できるようにした TWELITE Apps 対応のアプリの単体ビルドでは、ビルド時にインタラクティブモードの言語を指定できるようにした GOLD 対応コードを含めていない BLUE/RED アプリは Lで始まるフォルダ名として SDK に同梱した (例: L_App_Aria)。 いくつかの問題修正を実施したApp_Uart:
Set timeout digits to 3 DBコマンドを実装した App_Wings:
memory clear was not proper which destructed memory area and caused unexpected behavior. Act_samples
MkFiles
MULTINONE 対応を実施した(ライブラリビルドなど)
ビルド対象ソースファイルにフォルダ名を追加できるようにした。
TARGET_BIN can be set by user’s makefile.
When it’s set, version file will be generated like $(TARGET_BIN).0-1-1. added TARGET_NAME_NO_VER_TWENET option to remove library version.
introduced _DISABLE_LTO make variable to force LTO settings even DISABLE_LTO is given as a make parameter.
Force non-Windows compilers to disable LTO introduced TWELITE_SUPPORTED make variable to specify buildable target system, which should be put on Makefile for projcects with limited target.
introduced TWELITE=LIST_SUPPORTED make parameter just to list supported targets.
MkFIles: supported LANG selection for interactive mode.
set TWE_LANG_PREF as JP, US or none for make a paramter required to set TWE_LANG_MULTI_SUPPORTED in the project Makefile, like
TWE_LANG_MULTI_SUPPORTED=US JP if both TWE_LANG_PREF and TWE_LANG_MULTI_SUPPORTED, -DUSE_LANG_INTERACTIVE={LANG CODE} is set. mwx and eastl are included for non-mwx build (using mw.mk for C projects).
APP_SRC_DEFAULT_DIR handling was wrong in mw.mk.
INCFLAGS_CXX has too many -Is without dir (some -I… was ignored)
SDK全般
以下はライブラリの修正抜粋を記載する。
MWSDK2024_07G (2024/7/16) ドキュメント修正のみ
MWSDK2024_07G-RC1 (2024/6/26) MWSDK2024_06G-3で実施したリリース向け検証にて発見された問題の修正を含めた。
スリープ復帰後のプルアップレジスタの設定が適切に行われていなかった問題を修正。 バージョン情報等の記述を整理した。
000README1STなどバージョン記述について以下の調整を行った。000manifestは種にビルドライブラリのバージョンを記述し、ドキュメントや付随アプリ・サンプルコードのバージョン記述は別途とした。ドキュメントバージョン(最終更新日付)を000READEME1ST.md(html)に記載。 MWSDK付随のアプリコード、サンプルコードは 000vers_Wks_TweApps.md(html), 000vers_Act_samples.md(html), 000vers_Act_extaras.md(html) に各々記載 (Version.mk から機械的に生成) MWSDK2024_06G-3 (2024/6/19) — hot fix 設定用グローバル変数 G_TWENET_B_MAC_ALWAYS_RESET_ON_WAKE() を追加。1を設定するとスリープ復帰後 MAC の再初期化を行う。デフォルトは 0 で、スリープ前の状態からの復元 API を呼び出す。 一部のグローバル変数(RAM OFF スリープでも保持したい内容)について、G_TWENET_*() といったマクロに変更し、BANK7に移動した。(参考: TWENETmcu/board/bank7_reserve.h) MWSDK2024_06G-2 (2024/6/11) — hot fix スリープ復帰時に MAC 層を完全に初期化する処理を追加(370usec程度分に処理時間がかかる)。
#include "bank7_reserve.h" を行い、スリープ前にG_TWENET_B_MAC_ALWAYS_RESET_ON_WAKE()=0; を行うことで従前の処理に変更する仕様ですが、本バージョンでは本設定を行うと起床時に無限ループを実行する(確認のための暫定コード)。始動時に割り込みフラグがたっている割り込み源に対して、割り込みをクリアするコードを追加。
uint64_t g_twenet_irq_bm_on_bootで1になっているビットが、対応する割り込み。bool_t __twenet_irq_handler_pending_on_boot(int32_t IRQ_Type)の関数(WEAK)を定義することで、割り込みクリア前に処理を行うことができる。本関数をFALSEで戻すとNVIC_ClearPendingIRQ()による割り込みクリアを行う。bool_t g_twenet_skip_checkirqpending;を廃止。ToCoNet_vSleep()の初期の段階でタイマーを稼働させ、実際のタイマーカウント値設定までの時間を計測するように変更。タイマー非稼働時にはその分の補正がなかったため、時間誤差が大きかった。
タイマーカウント読み取りAPIをより安全なコードに変更(クロック待ちのウェイトが入る)。
MWSDK2024_06G-1 (2024/06/06) — hot fix スリープ時にPOWER DOWNが稀に失敗する問題に対して 100usecのディレーを挟んでPOWER DOWN 再試行する。割り込み禁止時点ですべての割り込みフラグをクリア クロックの停止を早めに実行する MWSDK2024_05G (2024/5/30) — beta スリープ復帰時の送信キューの初期化を行うようにした。(スリープ前の未送信状況は完全にクリアする) RAM OFF スリープ時に SRAM BANK7 を保持し、従来はデフォルト値に強制的に戻していたものを、スリープ前のIOの出力状態、プルアップ状態を復帰するようにした。メモリマップの詳細はこちら を参照ください 起床後に以下の処理を行い、IO状態を復元する。出力設定のピンについては、出力設定を上書きし、LO/HI 値を復元する。 全てのピンのプルアップ状態の保存値に基づいて復元する。I2C用のPIO10,11はプルアップ無効設定時にECSビットを立てます。 上記処理後に IO RETENTION ビットを元に戻す。 起床状況(POR, wake from RAM OFF sleep, wake from RAM ON sleep, etc) を判定するためのコードの厳格化を行いました。上述 RAM OFF スリープの判定を行うために必要な実装です。 u16AHI_PowerStatus() の戻り値で RAM OFF Sleep と Software Reset の区別がつかないなどの問題がありました。u16AHI_PowerStatus() に WatchDog からの復帰ビットを追加しました。 MWSDK2024_04G — beta I2Cバス関連の修正再初期化によりクロック周波数を変更できるようにした リファレンスのライブラリコードを TWENETmwx ライブラリ化に配置。
TWENETmwx/source/sensors/legacy/SMBus.[ch] GPIO 関連の API で機能(I2C, SPIなど)有効済みになっているピンに対する操作に対して、不用意に書き換えない目的でグローバル変数 g_twenet_u32_pio_special_func_attachedを用いていたが、不整合を起こすコードも散見されたため、グローバル変数ではなくcheck_pio_if_gpio() TWENETcmpt によりPIOレジスタを参照することで実施するようにした。※そういった不整合を起こしかねないユーザコードが無い場合は影響はない。 MWSDK2024_01_2 (2024/2/13) RAM OFF スリープ時の復帰後に DIO(GPIO) 制御が出来ない問題を修正。 BANK7 メモリに96バイト分のリザーブ領域を追加 (現バージョンでは未使用)。 RAM OFF スリープ時の復帰後について RAM OFFスリープ復帰後は、通常のハードリセットやPOR起動と同様の初期化手順となり、スリープ前のほとんどの状態は継承されません。今回の修正では、スリープ復帰後にDIO状態を変更できない問題に対応します。
以下の振る舞いをします。
RAM OFF スリープ復帰後に cbAppColdStart(TRUE) を終了した後に、DIO状態を保持するレジスタ (SYSCON->RETENTIONCTRL)のビットをクリアします。スリープ前に出力設定にしたピンはcbAppColdStart(TRUE)の処理中に、出力設定およびHI/LO値の再設定を行う必要があります。 cbAppColdStart(TRUE)の処理中は、出力設定やHI/LO値の設定を行っても、ピンの状態は変わりません。cbAppColdStart(TRUE)の処理中での、ピンのHI/LO指定について確認する方法は用意されていません。cbAppColdStart(TRUE)の処理中に IO 制御を行いたい場合は、ピンの出力設定およびHI/LO設定を行った後、本修正で新設したvoid vAHI_DioRetentionRelease_MW()関数を呼び出します。関数呼び出し前に設定したHI/LO値に速やかに変化し、それ以降のHI/LO設定が可能になります。 DIO割り込み起床をした場合は 、対応するDIOを示すビットマップをu32AHI_DioWakeStatus()関数の戻り値として取得できます。RAM OFF スリープにおいても、同様にビットマップを得られます。u32AHI_DioWakeStatus()関数は、呼び出し後に内部的にビットマップをクリアしますので、続けて呼び出すと2回目は0が戻ります。u32AHI_DioWakeStatus()関数は、TWENET C API利用時は、cbAppColdStart(FALSE)呼び出し中に実行します。MWXライブラリでは内部的に呼び出しを行い値を保存しています。 BANK7メモリのリザーブ領域について 修正の途上、追加した予約領域です。malloc()などのメモリ確保APIを用いる場合に利用されるヒープ領域を、未設定時を含めBANK7を利用する場合、96バイト領域が予約領域となります。従前の予約領域と含め合計128バイトが予約され、BANK7で利用できるのは 4096-128 = 3968バイトです。
詳細はこちら を参照ください。
MWSDK2022_08 TWELITE APPS キューアプリ(App_CUE/App_CUE_OTA) v1.1.1 動作センサーパルモード(シングルショット) 時にパルIDが意図しない値が出力される点を修正 アリアアプリ(App_ARIA/App_ARIA_OTA) v1.1.1 計測した温度が42℃以上になったときに、異常な値が出力される点をを修正 パルアプリ(App_PAL) v1.5.2 動作センサーパルのシングルショットモード時に意図しないパルIDが出る点を修正 計測した温度が一定以上になったときに、異常な値が出力される点を修正(TWELITE ARIA用の修正なので、環境センサーパルのコードの修正はありません。) 親機・中継機アプリ(App_PAL) v1.2.1 パルアプリ(キューアプリ、パルアプリ)のデータの出力が意図しない値が出力される場合がある点を修正 シリアル通信アプリ(App_Uart) v1.4.7 ActEx_AQM0802 MWXストリーム出力に対応 AQM1602(16x2行の液晶)に対応 コントラスト調整機能の追加 MWSDK2022_07 サンプルActの追加、TWELITE ARIA/TWELITE CUE/TWELITE PALに新機能追加、他。
TWELITE APPS 000desc.txtに英訳を追加 Samp_PingPong、Samp_I2Cを新規採用非推奨に変更 キューアプリ(App_CUE/App_CUE_OTA) v1.1.0 指定した間隔ごとに加速度を1サンプルずつ送信する機能の追加 一定期間計測した加速度の平均、最小最大値を送信する機能の追加 アリアアプリ(App_ARIA/App_ARIA_OTA) v1.1.0 温湿度の計測値にオフセットと係数を掛ける機能を追加 パルアプリ(App_PAL) v1.5.1 動作センサーパルで加速度を1サンプルずつ送信する機能の追加 動作センサーパルで 一定期間計測した加速度の平均、最小最大値を送信する機能の追加 環境センサーパルで温湿度の計測値にオフセットと係数を掛ける機能を追加 親機・中継機アプリ(App_PAL) v1.2.0 Act_samples 000desc.txtに英訳を追加 BRD_I2C_TEMPHUMID の追加I2C センサーデバイスを用いて、定期起床からの計測および送信を行うサンプル 000desc.txtに英訳を追加 ActEx_AQM0802 の追加Sitronix社のI2C接続LCDコントローラ ST7032 を実装したLCDモジュール AQM0802 を使用するサンプル mwx - 0.2.0 ヒープ領域へのメモリ確保を行う Wire オブジェクトを変更 utils.hでの名前の衝突を避けるため、関数名をG_OCTET()からG_BYTE()に変更 attachIntDio()において、vAHI_DioInterruptEnable()の順番を変更 ユニバーサルレシーバ (NWK_LAYERED, NWK_SIMPLE またはネットワークレスパケットを同一実行コードで受信する) をサポートするために the_twelite.network2 を追加 NWK_LAYERED を追加 (現時点では親機受信のみ対応) MWXの初期化時にアプリケーションのバージョンを設定する MWX_Set_Usder_App_Ver() 関数を導入 mwx::pnew() を追加し配置newの記述の簡素化 EASTLのサポート追加 EASTL用のnew[]演算子の追加 MWXのソースコードのほとんどをプリコンパイルし、コンパイルの高速化を図った DIOイベントが無関係なポートに引き渡されていたのを修正 twesettings - 0.2.6 MWSDK2021_09より変更なし。コンパイル済みのライブラリは 2.5 のまま。ソースコードのみ。
TWENET C - 1.3.05 (L1305) MWSDK2021_09より変更なし。
MWSDK2021_12 TWELITE ARIA 対応に伴う修正、他。
TweApps App_PAL (1.3.4) App_UART (1.4.6) 末尾にNUL文字を出力していたが、出力しないように修正 出力のカスタマイズで > (チェックサム範囲終了)が動作するようになった。例えばMSG;<*>;%X\\nと設定すると送信文字列 “HELLO” に対して “MSG;HELLO;nn<改行>” (nnはHELLOのXORチェックサム) が出力される。 App_ARIA (1.0.0) App_ARIA_OTA (1.0.0) App_Wings (1.1.6) 親機が App_Wings でない場合に、中継機設定の App_Wings が中継しない問題を修正。 Act_samples BRD_ARIA スリープを伴う間欠駆動をしながら、計測、無線送信を行うサンプル。
Unit_brd_ARIA ボードビヘイビア ARIA に含まれる SHT4x センサオブジェクト .sns_SHT4x を利用し、センサーのみを動作させるサンプル。
mwx - 0.1.9 TWELITE ARIA 対応の追加ボードビヘイビア <ARIA> (BrdARIAクラス) の追加 センサー定義 SnsSHT4x の追加 インタラクティブモード設定 <STG_STD> のメニューの組み込み機能 (Extra Menu) が動作するように修正(※ mwx0.1.8 ではインタラクティブモード表示中に Serial 経由の出力を自動的に抑制するようにしたが、組み込み機能のコード中からも出力できるように手続きを用意した) twesettings - 0.2.6 MWSDK2021_09より変更なし。コンパイル済みのライブラリは 2.5 のまま。ソースコードのみ。
TWENET C - 1.3.05 (L1305) MWSDK2021_09より変更なし。
MWSDK2021_09 各サンプルのVS Code対応を強化TWELITE STAGE から環境変数を設定し、STAGE経由でVS Codeを開いた場合には、特別の名設定なしに、VS Code内のコード解釈やビルド実行を行えるようにした。 TweApps App_CUE (1.0.3) スリープ時間を61秒以上に設定すると発生する問題を修正 App_IO (1.3.2) UARTコマンド処理で8ポート分までしか反映されない問題を修正 App_PAL (1.3.3) OTAメッセージの調整 MC3630加速度センサーの初期化手続きの時間待ちを確実に行うようにした MC3630の加速度センサー割り込み時のしきい値を設定で変更できるようにした App_Tag (2.2.4) (2525A) ADXL345 加速度センサーでスリープ復帰時ごとのセンサー値を得る場合、適切なセンサー値を得られない場合があったため、複数サンプル取得して不適切なサンプルの影響を除外した。 パケット重複除去のためのDUPCHKモジュールに明示的に適切なパラメータを与えるようにした MAX31855のセンサー取得のための待ち処理を明示的に行うようにした App_UART (1.4.1 -> 1.4.5) TWELITE UART専用ビルドの追加 高頻度に送信するときにパケットIDが想定外に一巡して重複チェッカによりパケットが除去される場合があったが、オプションビット0x0000:4000の設定で高頻度向けの設定にするようにした モード E を追加しこれをデフォルトとした。従前のモードD(透過モード)では、到着したパケットのアドレス情報など無線パケットより得られる情報を得ることが出来なかったが、出力に諸情報をカスタマイズ可能な形で含められるようにした Act_samples 以下のように順を追って理解しやすいようにサンプルを整備したact0..4 Scratch (シリアル入力で送信) Slp_Wk_and_Tx (スリープ→起床→送信) Parent_MONOSTICK (受信) … インタラクティブモード対応サンプルを拡充 on_rx_packet()及びon_tx_comp()コールバック関数に対応Parent_MONOSTICKサンプルの強化、パケット内容を解釈してセンサー値などを表示スリープを行うサンプルではSM_SIMPLEステートマシンを用いてloop()内を完結に記述 Unit_Cue_MagBuzサンプル(磁石が離れると圧電ブザーを鳴らす)の追加Unit_doint-bhvサンプル(ビヘイビアを用いたDIO割り込み検出)の追加サンプル名のリネームPAL_MOT -> PAL_MOT-fifoPAL_MOT-oneshot -> PAL_MOT-singlePAL_AMB-behave -> PAL_AMB_bhv mwx - 0.1.8 Serial1のポート、代替ポートの定義が適切でなかったSerial(UART0)のボーレートを変更できるようにした受信パケット(on_rx_packet())、送信完了(on_tx_comp())を知らせるイベントコールバックを追加コールバック関数の定義をしなければ従前の手続きも利用可能 <STG_STD>インタラクティブモード設定の定義ID間違いや一部デフォルト値の変更など<STG_STD>インタラクティブモード設定でAppIDに加えて、チャネルと論理デバイスIDのデフォルト値を変更できるようにしたthe_twelite と <NWK_SIMPLE> オブジェクトの設定を、一部の設定についてインタラクティブモード<STG_STD> オブジェクトで行えるようにした<NWK_SIMPLE>で再送回数のデフォルト値を設定できるようにした<STG_STD> インタラクティブモードの画面が出ている間はアプリケーションからのSerial(UART0)の入出力を行わないようにしたCUE::PIN_SET, PAL???"":PIN_SETを追加 (PIN_BTNはボタンのないCUEでPIN_BTNを用いるのは不自然であるため)random()の名前空間をmwx::に移動 (グローバル名にエリアス)MONOSTICKのウォッチドッグ設定を32ms単位で行うようにした twesettings - 0.2.6 変更なし。コンパイル済みのライブラリは 2.5 のまま。ソースコードのみ。
TWENET C - 1.3.05 (L1305) チャネルマネージャ使用時に、最初のチャネル変更周期までは無線動作していない問題を修正 チャネル切替が失敗したときにチャネル切り替え保留を示す変数を0クリアしないように、64ms以内に再度チャネル切り替えするようにした(現状はチャネルは切替可能までポーリング待ちをしているため、保留動作はしないため、動作に変化は想定しないが実装上自然な処理にした) Macの初期化関数(初期化済みなら何もしないが僅かながらのオーバーヘッドになりうる)を頻繁に呼び出していたため、これを抑制した ByteQyeueの割り込み処理を厳格化したハードウェア割り込みがほぼ同時に複数発生しハードウェアイベントキューに複数イベントが有る場合、イベントキューの後ろにあるイベントが遅延する可能性があった(先頭だけ処理して一旦処理ループを抜ける) MWSDK2020_12 TweApps App_CUE 1.0.1 App_CUE_OTA 1.0.1 App_Wings 1.1.4 App_PAL 1.3.2 TWELITE CUE 用のコードを追加 NOTICEPALに受信のみモードを実装 Act_samples Unit_PktParser の追加 (シリアル電文パーサー) Unit_EEPROM の追加 (EEPROMの読み書き) Unit_ADC (ADCの読み取り) Unit_CUE (TWELITE CUEのAct対応) mwx - 0.1.7 詳細は https://mwx.twelite.info/v/latest/ を参照 pkt_parser の追加 (シリアルメッセージを解釈) EEPROM クラスの追加 (EEPROM の読み書き) receive_nwkless_pkt オプションを追加。NWK_SIMPLEネットワーク下で、無線パケットのアプリケーションID,チャネルは一致した通常パケットを受信することが出来る。 twesettings - 0.2.6 コンパイル済みのライブラリは 2.5 のまま。ソースコードのみ。
tweinteractive_defmenus.c が提供するメニューで項目数が10を超えたときの、リスト表示・選択動作の問題を修正。 MWSDK2020_10 mwx ライブラリの更新、サンプルの追加・更新、より実践的なサンプル Actエクストラ(ActEx_???) の収録を行いました。
TweApps App_PAL 1.2.1 NOTICE PAL 対応 送信間隔を1秒おきの設定を可能にした App_Tag 2.2.2 App_Twelite 1.9.1 シリアルメッセージで死活判定をするための ACK 応答を追加 App_UART 1.4.1 重複パケットのタイムアウトを調整した (100ms 間隔で受信できる、重複判定のタイムアウトは1秒でこれを超えて同じパケットが届いた場合は再度表示される) App_Wings 1.1.3 Act_samples 単機能のみを確認する Unit_??? サンプルの追加 通知PAL (NOTICE PAL) の LED ドライバ制御用のサンプル追加 (Unit_using_PAL_NOTICE) スリープ起床後送信するテンプレートコード Slp_Wk_and_Tx の追加 Pal_MOT_oneshot の loop() を状態遷移で再記述 Act で設定(インタラクティブモード)を用いるサンプル Setting を追加 ActEx_DIO_Trans を追加 (DI状態を高速サンプルして送信先のDOに再現) ActEx_Sns_BME280_SHT30 を追加 (環境センサー BME280, SHT30 デバイス) ActEx_Sns_MLX90614 (赤外温度センサー MLX90614 の利用) ActEx_Sns_VL53L1X (レーザー距離センサー VL53L1X の利用) mwx - 0.1.6 [0.1.6b4] 商・余を計算する div100() をSerial等へ出力できるようにした smplbuf<> 配列クラスの実装変更。消費メモリの削減などを目的としてmwx::streamの継承をやめ、別途継承クラスとヘルパークラス定義した mwx_printf() mwx_snprintf() の関数を追加した the_twelite.stop_watchdog(), the_twelite.restart_watchdog() を追加した mwx::stream のメンテナンス: operator bool() の廃止。読み出しタイムアウトの設定で 0xff を指定した場合(.set_timeout(0xff))タイムアウトを無効に。その他 « 演算子の定義を追加。 [0.1.6b3] [6fd542c] 10,100,1000による除算(商と余を同時に計算) div10(), div100(), div1000() を追加。値域を制限し乗算とビットシフトを中心に構成。 暗号化パケットの対応メソッドを追加packet_rx::is_secure_pkt() : 受信パケットが暗号化されているかどうかの判定 STG_STD::u8encmode() : インタラクティブモードでの暗号化設定を取得 STG_STD::pu8enckeystr() : インタラクティブモードでの暗号化鍵バイト列の取得 [0.1.6b2] Serial1: デフォルトのポートは半導体の仕様では I2C と重複する DIO14,15 だが、通常 I2C に割り当てられるため DIO11(TxD), DIO9(RxD) とした。
Serial: ボーレートの指定で /100 が発生するが、主要なボーレートについてこの計算を省略するようにした。
Serial: available(), read() を外部で実施するための代理関数の保持を void* のみとし、仕様メモリを 8bytes 削減。
typedef boolean の追加
ネットワーク: 暗号化の対応を追加。
暗号化を有効にするには NWK_SIMPLE::secure_pkt(const uint8_t*, bool = false) を設定追加する。1番目のパラメータは暗号キー、2番目を true にすると、平文のパケットも受信する。
auto&& nwk = the_twelite.network.use();
nwk << NWK_SIMPLE::logical_id(0xFE) // set Logical ID. (0xFE means a child device with no ID)
<< NWK_SIMPLE::secure_pkt((const uint8_t*)"0123456789ABCDEF");
;
SHT3xとBME280のセンサーサポート追加
センサー: レガシーコード(Cライブラリのラッパクラス)で、設定パラメータや状態をやり取りするための仕掛けを追加した。
センサー: SHT3x, BME280では I2C アドレスを指定可能とした。
設定: hide_items() を追加。不要な設定項目を削除可能。
設定: H/W UTIL メニューを追加。DIの状態表示、I2Cのプローブ、PAL EEPROM内容の表示。
設定: 暗号化関連のメニューの追加
[4d8ce8b] I2C関連の修正(TwoWireクラスを用いて実装されたコードとの親和性を向上するための修正)requestFrom(false) の処理時に NO_STOP メッセージの送信コードが無かったため処理が正常に行われなかった。 TwoWire のクラス名エリアスを追加した。 begin() 処理で、多重初期化しないようにした。 setClock() メソッドを追加(ただしダミー関数で何もしない) WIRE_CONF::WIRE_???KHZ を追加。バスクロックの主要な設定値を追加した。 twesettings - 0.2.5 更新無し
TWENET C - 1.3.04 (L1304) 更新無し
MWSDK2020_08_UNOFFICIAL - 2020-08-05 mwxライブラリに設定(インタラクティブモード)を追加しました。
mwx - 0.1.5 設定ビヘイビア <STG_STD> を追加mwx ライブラリ組み込みビヘイビアは network board application settings の4種類になったため、メインループの処理に settings の動作を追加 設定ビヘイビアは Serial 入力を横取りするため、これに対応して別途入力用のFIFOキューを追加し、Serail.read() はこのキューからデータを取得するように変更した <STG_STD>のテーブルは固定的であるが、項目名・ラベルの設定を差し替えるインタフェースを追加 チャネルマネージャ(複数チャネル利用)の対応を追加 twesettings - 0.2.5 mwx にインタラクティブモードを追加するための整備設定名入れ替えのためのテーブル定義を追加 mwx 用のテーブルを定義していたが mwx ライブラリに移動 TWENET C - 1.3.04 (L1304) 内部モジュールを mwx から登録するためのサポート関数を追加 MOD_重複チェッカのタイムアウトと時間スケール値をパラメトリックにできるヘッダ定義を追加 MWSDK2020_07_UNOFFICIAL - 2020-07-27 いくつかの問題とmwxライブラリのAPIを追加しました。
mwx - 0.1.4 MC3630 向けの初期化処理の強化 setup(), wakeup() 中の delay() の精度向上 Serial1 インスタンスの宣言の追加 delayMilliseconds() の追加 digitalReadBitmap() の追加 Alalogue のコールバック関数が呼ばれない場合があった twesettings - 0.2.4 μ秒待ちのAPIを追加 TWESYSUTIL_vWaitPollMicro() TWENET C - 1.3.03 (L1303) 変更なし
MWSDK2020_05 - 2020-05-29 MWSDK2020_05 を起点に以後の変更内容を記載します。
mwx - 0.1.3 twesettings - 0.2.3 TWENET C - 1.3.03 (L1303) 1.6 - TWELITE GOLD関連の情報 TWELITE GOLDを利用する場合の特有の話題
TWELITE GOLDを利用する場合の特有の話題を記載します。以下の情報は参照しなくても、TWELITE STAGE アプリを用い Act をビルドするといった開発は可能です。
(この頁の記述は2023年7月時点の NXP 社のサイトに基づいており、現在のサイトとは手順などが違う場合があります)
TWELITE GOLDビルドについて 本ドキュメントでは、TWELITE GOLDのアプリケーションをビルドするための、開発環境について解説します。
TWELITE シリーズの開発環境は2種類あります。本ドキュメントでは主に MCUXpresso による開発方法を解説します。
TWELITE STAGE NXP 社の MCU ExpressoNXP 社の公式開発環境です。 デバッガ (MUCLink) を用いたファームウェアの書き込みやデバッグ(スリープは対応しない)に対応します。 注意 当ドキュメントのリンクについては 2023年 7月現在のものです。 本資料を参照いただくにあたり、一般的な開発環境の構築や操作に慣れている方を前提とします(例:コマンドプロンプトでの操作を行えること、システムPATHの設定を行えること、Eclipse 統合開発環境について通常の操作が行えることなど)。 NXP社から得られる資料は英語です。当社では英語資料の翻訳等は実施しません。必要に応じて翻訳ツールなどを利用下さい。 ARM Cortex-M4 を利用するに当たり ARM 社の資料なども参考にして下さい。 原則として当社提供のサンプルプログラムで使用する範囲(当社ライブラリ対応範囲での無線パケットの送受信、当社ライブラリ対応範囲でのペリフェラルの利用)での対応とします。サンプルなどで紹介しないような機能(ファームウェアの暗号化、ZigBee PRO スタックの利用、Thread スタックの利用、MCUXpresso 添付のライブラリ全般などについては、NXP社の公式情報を参照下さい)。 手順 技術資料 1.6.1 - MCUXpresso SDK のダウンロード MCUXpresso SDK のダウンロード
MCUXpresso SDK のダウンロードについて解説します。
MCUXpresso SDK のダウンロード NXP社のウェブサイトのデザインは本記載時点(2022/01)を用いて解説します。またサイトの言語は英語です。
アカウントの登録 https://www.nxp.com にアクセスし、ウェブページ上のナビゲーションにある SIGN IN を選択する。アカウント登録がまだの場合は Register を選択し、必要事項を入力します。
MCUExpresso IDE のダウンロード ログインした状態で、以下のリンクをから MCUExpresso IDE をダウンロードします。
https://www.nxp.com/design/software/development-software/mcuxpresso-software-and-tools-/mcuxpresso-integrated-development-environment-ide:MCUXpresso-IDE
SDK Builder ページ ログインした状態で、以下のリンクに移動します。このリンクから SDK ファイル一式をダウンロードします。 https://mcuxpresso.nxp.com/
Select Development Board [Select Development Board] を選択します。
mcuexpresso_nxp_com
対応SDK検索 JN5189DK6 をキーワードとして、対応SDKを検索します。
検索後の例
Build MCUExpresso SDK JN5189DK6 (JN5189) を選択し、右側にある [Build MCUExpresso SDK] のバージョンを [v2.6.X] に設定します。[Build MCUExpresso SDK] をクリックします。
SDKバージョンの指定
追加コンポーネントの選択 ダウンロードに含めるコンポーネントを選択します。
ダウンロード画面1
リスト中のコンポーネントについてはほとんど使用しませんが、すべて選択しておきます。 Host OS はお使いの OS (Windows/Mac/Linux) を指定します。 Toolchanin / IDE は MCUExpresso IDE を指定します。 すべての設定を行った後に [DOWNLOAD SDK] をクリックします。クリック後にEULA(ソフトウェア使用許諾契約)などの確認がありますので、画面に従ってください。 ダウンロード Downloads 画面が出ます。すべてダウンロードしておきます。
ダウンロード画面2
SDK Archive, SDK Documentation, Config Tools data をダウンロードしておきます。(EULA の確認があるものもあります) SDK API Reference Manual のリンク先は確認の上、ブックマークなどに保存しておきます。 1.6.2 - MCUXpresso 環境セットアップ ここでは MCUXpresso IDE を用いた環境構築を解説します。
ここでは MCUXpresso IDE を用いた環境構築を解説します。
MCUXpresso による開発は必須ではありません。通常は TWELITE STAGE アプリや Makefile によるビルドが可能ですが、以下に留意してください。
デバッガなどを利用する場合は、MCUXpresso によるビルドと実行が必要です。 NXP のテンプレートソースコードやライブラリソースコードとの互換性はありません。 MCUXpresso が提供する諸機能(メモリレイアウトの設定、ピン定義など)も動作しないものがあります。 TWELITE STAGE アプリの提供する Makefile とはビルド定義が異なる場合があります。 MCUXpresso 環境セットアップ 新規にIDEのインストールを行う前提で解説します。 すでに NXP 社の同IDEを利用している場合の検証や設定方法の案内などは実施できませんが、ツールの性格上、SDKパッケージの追加を行うことで対応できると考えられます。 同ツールの操作方法など詳細は当社サポートではご案内できません。MCUXpresso のUserGuide、元になる統合開発環境 Eclipse の解説などをご参照ください。 ツール並びにSDKのダウンロード こちら を御覧ください。
MCUXpresso IDE - インストール
ここで紹介する画面は、お客様の環境や設定によって違った表示になる場合もあります。
ダウンロードした MCUXpressoIDE_xx.y.z_nnnn.exe (Windowsの場合、xx,y,z,nnnnはバージョン識別子) を実行し、画面の指示に従います。
インストール完了後、MCUXpresso IDE を起動します。 作始動画面
Welcome 画面が表示されます。この画面内にはSDKのインストーラなどもメニューにありますが、IDEを選択してください。
この画面を再度表示したい場合はメニューから[Help]>[Welcome]を選択します。
次の手順では、ダウンロード済みの SDK パッケージ(上記手順を踏んでxmlファイルを書き換えたもの)をインストールする方法を紹介します。
MCUXpresso IDE - SDKパッケージのインストール SDKパッケージをインストールしないと、MCUXpressoからのTWELITE GOLDのファームウェアの書き込みなど、ほとんどの操作ができなくなります。
直前の手順で Welcome 画面から IDE を選択すると、IDEの通常画面の状態に変わります。SDKパッケージのインストールは、この画面上で操作します。
Installed SDK タブを開き (画面上に見つからない場合はメニューより[Window]>[Show View]>[Installed SDK]を選択)、ダウンロード済みの SDK ファイル(ZIP形式)を、ドラッグ&ドロップします(Windowsの場合)。確認ダイアログが表示されますので [OK] ボタンを押します。 SDKの ZIP ファイルをドラッグ・アンド・ドロップします。
SDKを用いた新規プロジェクト作成やサンプルなどを動作させる場合は展開したフォルダを選択して下さい。
SDKインストール
始動画面
通常は SDK_2.x_JN5189DK6 という名前でリストに登録されます(上記の例では SDK_2.6.3_JN5189DK6 になっています)。
※ SDKファイルは、MCUXpresso 管理下のディレクトリにコピーされます。登録時に展開したディレクトリや zip ファイルは削除しても構いません。
SDKのサンプルなどを利用したい場合は [Installed SDKs] タブ内の SDK_2.x_JN5189DK6 を右クリックし、[Unzip Archive] を選択します。登録した ZIP ファイルを展開します。 ※ 展開したSDKディレクトリを参照するには、[Installed SDKs] タブ内の SDK_2.x_JN5189DK6 を右クリックし、[Open Location] を選択します。
MCUXpresso IDE - ワークスペースの作成 ワークスペースは、開発プロジェクト(多くの場合一つのプログラムを構築するための開発単位でソースコードやビルド中間物などが含まれる)を複数格納する事が可能です。ワークスペース内のプロジェクト間の依存関係なども設定でき、プロジェクト間の参照も行います。
MUCXpresso IDE を初回起動すると自動的にワークスペースが作成されますが、当社のライブラリなどを格納するためのワークスペースを新たに用意します。
ディレクトリ名に日本語や空白が含まれない開発用のディレクトリを作成します。中身は空にしておいてください。ここではC:\Work\Wks_TWENET(Windows)という名前で解説します。 メニューより[File]>[Switch Workspace]>[Other…]を選択します。 作成したワークスペースディレクトリを入力して [Launch] ボタンを押します。 MCUXpresso IDE - ライブラリ・サンプルをコピー 当社から提供のアーカイブをワークスペースディレクトリにコピーします。
MCUXpresso IDE - ライブラリ・サンプルのインポート TWELITE GOLD 向けアプリケーションを開発するために必要なライブラリやサンプルコードを MCUXpresso に読み込みます。
メニューより [File]>[Import…]を選択します。
→ Import ダイアログが開かれます。 リスト中の [General]>[Existing Projests into Workspace] を選択して [Next >] ボタンを押します。
→ Import ダイアログ (Import Projects) が開かれます。 [Select root directory: ]にある[Browse…]ボタンを押して、ワークスペースディレクトリを選択します。
→ 追加可能なプロジェクトが [Projets:] リストに表示されます。 [Finish] ボタンを押します。
→ プロジェクトがワークスペースに追加されます。[Project Explorer]タブには一覧が表示されます。 [Project Explorer]タブ上ですべてのプロジェクトを選択して、右クリックメニューより [Close Projects] を選択して、一旦 TWENETxxx 以外のプロジェクトを全て閉じておいて下さい(必須作業では有りませんが、不要なプロジェクトが開かれていると見づらいといった作業性の向上を目的とします) Pythonのインストール **Windows では Python のインストールを省略できます。**MWSTAGE/Tools 以下に Python の実行環境を収録しており、通常は、...TWENETmcu/linker/scripts/dk6_image.sh スクリプトから上記を呼び出すようになっています。ビルド時にPythonの動作に関するエラーが発生する場合など必要な場合は、別途インストールを試みてください。
MacやLinuxの場合 、通常の構成では最初からpython3がインストールされていますので、後述の pycryptodome ライブラリの確認と必要に応じてインストールを行います。
概要 各プロジェクト内にはビルドの後処理としてバイナリイメージ署名データ (image signature) を埋め込むスクリプトが含まれ、コンパイル後のバイナリイメージの書き換え処理を行っています。この書き換えには Python スクリプトと pycryptodome ライブラリが用いられますが、別途インストールが必要です。
サンプルプロジェクトに含まれるプロジェクトでビルドを成功させるためには、以下を必要とします。
コマンドプロンプトを開き py -3 または python3 というコマンド名でPythonスクリプトが実行できること Windows環境では python.org からインストーラをダウンロードする方法、Microsoft Store から導入する方法の2種類があります。いずれかの方法で Python をインストールします。
python.org からインストールした場合はインストーラの指示に従って下さい。またPATHの設定が必要になった場合に備えてインストールディレクトリは把握しておいて下さい。Microsoft Store からインストールした場合は、%USERPROFILE%\AppData\Local\Microsoft\WindowsApps\ にインストールされるようです。参考にして下さい。 インストール後にコマンドプロンプトから python3 が実行できない場合は、環境変数PATHの確認を行って下さい。 (py.exe コマンドが実行できる場合は py -0pと実行すれば各インストールディレクトリが表示されます)
MacOS や Linux 環境については、一般の情報を参照の上 python3 を導入しておいて下さい。
Python のインストール後にコマンドプロンプトを開き python3 --versionと入力すると、バージョン番号が出ます。
C:\XXX\> python3 --version <=== インストール後、バージョンの確認
Python 3.10.2
Windows で特定のバージョンのPythonを動作させる インストール済みの Python で動作に問題があったり、これに手を付けたくない場合や、別のバージョン (例:3.8がインストール済みとしたら 3.7 など) のインストールを検討して下さい。
注:別のバージョンをインストールする場合にインストーラが PATH を更新すると python3 コマンドが、新しくインストールしたバージョンになります。新たにインストールする際はインストーラによる PATH の設定は行わない方が良いでしょう。また py.exeコマンドで起動するコマンドがインストール後のバージョンに変わる場合もあります。
Python のバージョン切り替えには py.exe コマンド(Pythonインストール時に同時に導入される)を利用します。
C:\XXX\> py -0 <=== インストール済みのPythonのリスト
Installed Pythons found by py Launcher for Windows
-3.8-64 *
-3.7-64
-3.10-64
-2.7-64
<<< ここで Python3.6 をインストールする >>> (注:3.6はメンテナンス終了)
C:\XXX\> py -0
Installed Pythons found by py Launcher for Windows
-3.8-64 *
-3.7-64
-3.6-64 <=== 3.6 が追加されている
-3.10-64
-2.7-64
C:\XXX\> py -3.6 <=== Python3.6を起動してみる
Python 3.6.8 (tags/v3.6.8:3c6b436a57, Dec 24 2018, 00:16:47) [MSC v.1916 64 bit (AMD64)] on win32
Type "help", "copyright", "credits" or "license" for more information.
>>> ^Z <=== Ctrl+Z [Enter]で終了
C:\XXX\> py -3.6 pip list <=== Python3.6のpipを実行してみる
Package Version
---------- -------
pip 18.1 <=== インストール済みのモジュールが列挙される
setuptools 40.6.2
You are using pip version 18.1, however version 21.3.1 is available.
You should consider upgrading via the 'python -m pip install --upgrade pip' command.
上記のように py.exe コマンドを用いることで、違うバージョンの Python と pip を実行することが出来ます。現環境下の Python を触りたくない場合は、現環境ではないバージョンの Python をインストールして
特定バージョンを用いる場合はプロジェクトの[Properties]>[C/C++ Build]>[Build Variables] に DK6_PY を追加して下さい。以下の例では py.exe -3.6 を設定しています。(Configuration は Release/Debug 両方で設定します)。
pythonバージョンの設定
pycryptdomeのインストール 当社で提供したサンプルやライブラリ群のビルドでは必要ありません。当社ではファームウェア関連の暗号化に対応するサポートは行いません。NXP社の公式情報、サポートコミュニティにて情報を得て下さい。
dk6_image_tool.pyの実行では、暗号化を用いたファームウェアの署名等に必要になる場合があります。以下の例(Windows 環境、py.exe コマンド利用)を参考に pycryptodomeを導入して下さい。
C:\XXX\> py -0 <=== インストール済みのPythonのリスト
Installed Pythons found by py Launcher for Windows
-3.8-64 *
-3.7-64
-3.10-64
-2.7-64
<<< ここで Python3.6 をインストールする >>> (注:3.6はメンテナンス終了)
C:\XXX\> py -0
Installed Pythons found by py Launcher for Windows
-3.8-64 *
-3.7-64
-3.6-64 <=== 3.6 が追加されている
-3.10-64
-2.7-64
C:\XXX\> py -3.6 <=== Python3.6を起動してみる
Python 3.6.8 (tags/v3.6.8:3c6b436a57, Dec 24 2018, 00:16:47) [MSC v.1916 64 bit (AMD64)] on win32
Type "help", "copyright", "credits" or "license" for more information.
>>> ^Z <=== Ctrl+Z [Enter]で終了
C:\XXX\> py -3.6 pip list <=== Python3.7のpipを実行してみる
Package Version
---------- -------
pip 18.1 <=== インストール済みのモジュールが列挙される
setuptools 40.6.2
You are using pip version 18.1, however version 21.3.1 is available.
You should consider upgrading via the 'python -m pip install --upgrade pip' command.
C:\XXX\> py -3.6 -m pip install pycryptodome <=== pipでpycryptodomeを導入
Collecting pycryptodome
Downloading https://files.pythonhosted.org/packages/7e/.../pycryptodome-3.14.0.tar.gz (3.4MB)
100% |████████████████████████████████| 3.4MB 14.7MB/s
Installing collected packages: pycryptodome
Running setup.py install for pycryptodome ... done
Successfully installed pycryptodome-3.14.0
You are using pip version 18.1, however version 21.3.1 is available.
You should consider upgrading via the 'python -m pip install --upgrade pip' command.
pycryptodome のインストールで問題が置きたとき すでにインストール済みのPythonではその状況によっては pycryptodomeの導入時にエラーになって、単純な解決方法が見つからないような場合も考えられます。
Pythonをアンインストールして、新たに導入する(既存のインストール済みのPython環境を破壊しても良い場合)。 後述する「Windowsで特定のバージョンのPythonを動作させる」を参考に、現在環境とは別の Python 環境を用意する。 pipのアップグレード 以下のように pip3 list を実行すると pip のアップグレードを考慮すべきだと表示されるかもしれません。
C:\XXX\> py -3.X -m pip list <=== 3.X のバージョンを指定して pip list を実行
WARNING: You are using pip version 21.2.4; however, version 22.0.2 is available.
You should consider upgrading via the 'C:\Users\...\python.exe -m pip install --upgrade pip' command.
pycryptodomeがインストールできないなどの対処の一つとして、pipをアップグレードする場合は、以下のようにコマンドを入力します。
C:\XXX\> py -3.X -m pip install --upgrade pip
py.exe コマンドのデフォルトバージョンの指定 設定ファイル (C:\Windows\py.ini, C:\Windows\pyc.ini: C:\Windows は Windows のインストールディレクトリ) を以下の内容(2ファイルとも同じ内容)で作成します。以下の例では 3.8 をデフォルトに設定しています。
[defaults]
python=3.8
1.6.3 - MCUXpresso(Eclipse) の画面レイアウト MCUXpresso(Eclipse) の画面レイアウト
MCUXpresso(Eclipse) の画面レイアウトについて解説します。
MCUXpresso(Eclipse) の画面レイアウト MCUXpresso (Eclipse)では、目的に応じて様々な画面構成に設定することが出来ます。意図しない画面構成になった場合は以下の操作を行います。
メニューより [Window]>[Perspective]>[Open Perspective] より [C/C++], [Develop], [Debug]などを開く。
C/C++ : コード記述時を想定 (MCUXpresso 標準、特有のタブも表示) Develop: デバッグ時に利用 (MCUXpresso 特有のタブも表示) Debug: デバッグ時に利用 ツールバーなどあるはずのものが表示されない場合
ツールバー:メニューより [Window]>[Appearance]>[Show Toolbar] を選択する。 その他ウインドウ(Consoleなど):メニューより [Window]>[Show View] メニューから探します。 1.6.4 - TWELITE BLUE/RED 向けのビルドとライブラリについて TWELITE BLUE/RED 向けのビルドとライブラリについて
TWELITE BLUE/RED 向けのビルドとライブラリについて解説します。
TWELITE BLUE/RED 向けのビルドとライブラリについて ライブラリフォルダごとの扱い TWENETcore 対象 取り扱い その他 ソースファイル 非開示 ヘッダファイル TWENETcore/souce を参照。ライブラリファイル TWENET/current/lib以下に別途ビルドしたものを配置
TWENEText 対象 取り扱い その他 ソースファイル 非開示 ヘッダファイル TWENETcore/souce を参照。ライブラリファイル TWENET/current/lib以下に別途ビルドしたものを配置
TWENETutils 対象 取り扱い その他 ソースファイル TWENETutils/source_BLUE_REDを参照(ビルドディレクトリを含めた ZIP ファイルを格納)ヘッダファイル TWENETutils/souceを参照ライブラリファイル TWENET/current/lib以下に別途ビルドしたものを配置。
TWENETstgs (twesettings) 対象 取り扱い その他 ソースファイル TWENETstgs/sourceを参照。ヘッダファイル TWENETstgs/sourceを参照。ライブラリファイル TWENETstgs/source以下でビルドし、TWENET/current/lib以下にビルドしたものを配置。
TWENETmwx (mwx) 対象 取り扱い その他 ソースファイル TWENETmwx/sourceを参照。ヘッダファイル TWENETmwx/sourceを参照。ライブラリファイル TWENETmwx/source以下でビルドし、TWENET/current/lib以下にビルドしたものを配置。
TWENETeastl 対象 取り扱い その他 ソースファイル TWENETeastl/sourceを参照。ヘッダファイル TWENETeastl/sourceを参照。ライブラリファイル TWENET/current/lib以下に別途ビルドしたものを配置(MWSDK2022_08の版より更新予定なし)
1.6.5 - TWELITE GOLD向けのビルドについて TWELITE GOLD向けのビルドについて
TWELITE GOLD向けのビルドについて解説します。
バイナリ (.bin) の書き込みと実行 ここでは、プロジェクトのビルドが成功し .bin ファイルが生成された後に、その書き込みと実行確認について説明します。
書き込み方法には2種類あります。
LinkServer 経由(デバッガを用いる) シリアルポート 経由(TWELITE-R など)TWELITE STAGEアプリを利用 DK6Programmer を利用 LinkServer を用いた書き込みと実行 標準画面レイアウト(C/C++ Perspective) を前提に解説します。(参考:画面レイアウトについて )
LinkServer はNXP社の ARM 製品で書き込みやデバッグを行う際に標準的に使用されます。同様の機能を提供するサードパーティ製品(PEMicro probe, SEGGER J-link probe)も存在しますが、ここでは LinkServer を用います。
シリアルポートを利用しない書き込みのため、UART0をターミナルに接続したまま実験ができる。(ただし、デバッグに PIO12-13 は利用できない) LinkServer の接続に失敗することがあり、明示的に ISP=LO を行ったり、USBポートの再接続を行うなどの対応が必要になることが多い。 原則として MCUXpresso からの操作になる。 MCULinkと接続ボード
※ 写真のモジュール及び変換ボードは開発中のものです。製品と一部異なります。
ボードの入手 書き換えのためには、以下のボードが必要です。
ボードの接続 両基板の1.27mmピッチの10ピンヘッダを MCU-Link 付属のフラットケーブルで接続します。
TWELITE GOLD の電源供給(3.3V)が必要です。
MW-STA-MCULink の VCC (VCC SOURCE にある EXT ピンも可) に供給します。 電圧は 3.3V とします。(MCU-Link内部が3.3V) 注:GNDの接続を忘れないようにして下さい 参考:MCL-Link開発元が想定する利用ではありませんが 、MCU-Linkの基板裏面 J2 コネクタの1番ピンから 3.3V を取り出すことも考えられます。
MCU-Linkの回路図、部品データ、通電時の電圧、レギュレータの供給能力などの確認を行った上、注意して作業して下さい。また改造後は開発元・販売元よりの一切の対応/保証/損害に対する対応等は受けられなくなります。 MCU-Link のシリアルポートを利用したい場合は以下の接続を行います。
MCU-Link TX — MW-STA-MCULink の TWELITE DIP #10 (TX) MCU-Link RX — MW-STA-MCULink の TWELITE DIP #3 (RX) GND — MW-STA-MCULink のGNDピン チェック1 上記配線接続を終えた段階で、TWELITE DIP (TWELITE GOLD) を搭載しない状態で確認します。
外部電源を先に投入 (MCU-Linkから供給する場合は不要) する MCU-Link を USB コネクタに接続する MW-STA-MCULink での GND (DIP #1) と VCC (DIP #28) の電圧を確認する
→ 3.3V MCU-Link を USB コネクタから切り離し、外部電源(利用時)を遮断する チェック2 次に TWELITE DIP (TWELITE GOLD) を載せた状態で確認します。
MW-STA-MCULinkに TWELITE DIP を搭載する 外部電源(使用時)を投入する MCU-Link を USB コネクタに接続する TWELITE DIP 上の VCC-GND 間の電圧を確認する
→ 3.3V
→ 電圧が明らかに低いといった場合は、そもそも配線がおかしく電流が供給できない、配線ショートなど大電流が流れてしまっている、TWELITE DIP が故障しているなど問題が考えられます。速やかにUSBコネクタから取り外し、電源を遮断して下さい 。再度配線を確認します。 LinkServer による書き込み(同時にビルド) 接続エラーなどが比較的出やすいため、後述のトラブルシューティングに目を通してから始めて下さい
[QuickStart Panel]タブにある[LS]アイコンをプルダウンして [Program flash action using LinkServer] を選択します。
LinkServer の書き込みメニュー
初回は、以下のようなUSBバス上のLinkServer対応ボード一覧を表示します。複数台接続していなければ、出現するのは一つのみです。そのまま [OK] ボタンを押します。(以下の写真では MCU-Link のファームウェア更新を促す⚠が出ています。書き込める限りはそのまま使うことも出来ますが、必要に応じてファームウェアを更新して下さい)
LS ボードの探索
つづいて、プロジェクトのビルド→書き込み処理が行われます。
書き込み完了
書き込みは、上記画面例の様に書き込み状況、最後に Finished writing Flash successfully. と表示されます。(変更が少ない場合は、差分のみ書き込むこともあります)
1 of 1 ( 0) Writing sectors 0-141 at 0x00000000 with 72248 bytes
( 0) at 00000000: 0 bytes - 0/72248
( 7) at 00000000: 5632 bytes - 5632/72248
( 15) at 00001600: 5632 bytes - 11264/72248
( 23) at 00002C00: 5632 bytes - 16896/72248
...
( 85) at 0000DC00: 5632 bytes - 61952/72248
( 93) at 0000F200: 5632 bytes - 67584/72248
(100) at 00010800: 5120 bytes - 72704/72248
...
(100) Finished writing Flash successfully.
書き込み直後にマイコンがリセットされプログラムが動作します。
書き込む前にシリアルターミナルを起動しておけば、以下のような始動メッセージを確認することも可能です。
!INF MONO WIRELESS TWELITE APP V1-09-1, SID=0x86300101, LID=0x78
!INF DIO --> 00001100000001000000
LinkServer による書き込み(ビルド済み .bin, .axf ファイル) すでにビルド済みの .bin や .axfファイルを指定して書き込みたい場合は、ツールバーの半導体パッケージ形状のアイコンのプルダウンメニューから [MCUXpresso IDE LinkServer probes] を選択して下さい。
ツールバーから呼び出し
以下のようなダイアログが出ます。
書き込みダイアログ
[GUI Flash Tool] ダイアログ上では、以下を指定して [Run…] ボタンを押します。
[File to program] :書き込みたい .bin または .axfファイル [Format to use for programming] :ファイルの形式 トラブルシューティング LinkServer が見つからない 通常は、書き込み操作を行うと、初回に下記のように LinkServer 対応のボードが見つかりますが、見つからない場合があります。
LS ボードの探索
MCUXpresso を終了し、MCU-Link のUSBを抜いてから再度やり直して下さい。通常は不要ですが、プロジェクトの最上位フォルダに有る .launch, .swd ファイルを削除すると、以前の接続状を抹消できます。 LinkServer 接続時にエラーが出る エラーのダイアログ上の[OK]を押してエラーのリトライを行うエラーダイアログ例
PIO5=ISPENT (SMD#2, DIP#7) を LOW (GND) レベルに落とすボタンなどを設け、LinkServer の接続時に明示的に LOW レベルにする 何度やってもうまく行かない場合は MCUXpresso を終了し、MCU-Link のUSBを抜いてから再度やり直して下さい。 シリアルポートを用いた書き換え(TWELITE-Rなど) シリアルポートを用いた書き換えには TWELITE-R (文中では LITE-R とも表記) を接続します。ハードウェアの接続は TWELITE BLUE/REDと同様で主に UART0 TXD,RXD, PGM(ISPピン), RESET を用います。ただし、ファームウェアの書き込みのためのシリアル通信プロトコルは違っていますので、書き込みには対応のソフトウェアが必要です。
書き込みに対応するソフトウェアは以下です。
TWELITE STAGE DKProgrammer TWELITE STAGE を用いた書き込み TWELITE STAGE をビルド&書き込み環境として用いることができます。操作方法は TWELITE STAGE アプリ を参照してください。
DK6Programmer を用いた書き込み 書き換えのために TWELITE-R を用いることが出来ます。この方法は Windows のみ対応します。
既存の書き換えユーティリティTWELITE STAGE や TWE Programmer は利用できません
DK6Programmer ユーティリティのインストール 書き換えユーティリティはコマンドラインツールで、NXP社からダウンロードしたSDKにインストーラーが含まれます。
SDKのディレクトリ \tools\JN-SW-4407-DK6-Flash-Programmer を確認します。 ディレクトリ内には .pdf 形式の資料と .exe形式のインストーラが含まれます。 .exe形式のインストーラを実行して、インストーラの指示に従います。インストールした場所のディレクトリを把握しておき、必要に応じて PATH の設定を行います。 コマンド名は DK6Programmer.exe です。以後はこのコマンドがコマンドプロンプト上で動作する前提で記載します。
書き込み方法 LITE-R を USB ポートから外した状態で TWELITE DIP 形状の TWELITE GOLD を接続します。(頻繁に抜き差しする場合は アタッチメントZIFソケットが利用出来るアタッチメントを考慮下さい。)
LITE-R を USB ポートに接続する。このときに割当てられる COM ポートを確認します(確認方法は後述)。
.binファイルのあるディレクトリでコマンドプロンプトを開いておく。({プロジェクトディレクトリ}/Release または /Debug、MCUXpresso で開きたいフォルダを右クリックメニューより [Show in Local Terminal]>[Terminal]を選択すると、そのフォルダでのコマンドプロンプトを開く)
以下のコマンドを実行する。
DK6Programmer.exe -Y -V2 -P 1000000 -s COM4 -p App_Twelite.bin
コマンドの実行例
C:\Work\Wks_TWENET\App_Twelite\Release>DK6Programmer.exe -Y -V2 -P 1000000 -s COM4 -p App_Twelite.bin
COM4: Connected at 115200
COM4: Detected JN5189 with MAC address ...
...
COM4: Programming FLASH
COM4: 0
COM4: Programming FLASH
COM4: 1
...
COM4: Programming FLASH
COM4: 99
COM4: Programming FLASH
COM4: 100
COM4: Memory programmed successfully
エラーの表示が出た場合は、最初からやり直して下さい。多くの場合は、USBの認識がうまく行っていない、モジュールと LITE-R の接続不良ですので、LITE-R を USB コネクタから抜いて、LITE-R と TWELITE DIP (GOLD) の装着をやり直し、もう一度接続します。COMポートが出てこないような場合は、Windows の再起動を行うと解決する場合があります。
参考:COMポートの確認方法 DK6Programmer.exe を用いた LITE-R に割り当てられた COM ポートの確認方法を記載します。
TWELITER を外しておく。
DK6Programmer.exe -l を実行する。
C:\> DK6Programmer.exe -l
Available connections:
COM18 <== ポートがリストされる
TWELITER を接続する。
DK6Programmer.exe -l を実行する。実行後に表示されたCOMポートが LITE-R です。
C:\> DK6Programmer.exe -l
Available connections:
COM18
COM4 <== 新たに追加されたポートが LITE-R
参考:WSLを用いた書き換えスクリプト例 WSL (Windows Subsystem Linux) は、動作やパフォーマンスに制約事項がありますが、Linux のシェルから Windows のファイルシステム上のファイルを参照したり、Windows のコマンドを呼び出すなど、Windows 用のユーティリティを動作させるためにも利用できます。
以下は書き換え用の bash スクリプト例です。.bashrcに定義しておけば jn5189_write [.bin file] [COM port]のように入力を簡易に出来ます。
function jn5189_write ()
{
PROG= /mnt/c/nxp/DK6ProductionFlashProgrammer/DK6Programmer.exe
if [ -z " $2" -o ! -f " $1" ] ; then
echo "jn5189_write: [BIN_FILE] [COM_PORT]"
echo " e.g.) jn5189_write myfirm.bin COM3"
$PROG -l
else
FILE= $1
shift
COM= $1
shift
BAUD= 1000000
$PROG -Y -V2 -P $BAUD -s $COM -p $FILE $*
fi
} 1.6.6 - デバッガの使用 デバッガの使用
デバッガの使用について解説します。
デバッガの使用 デバッグの利用は MCUXpresso 上でのビルドを行い、MCU-Link の接続が必要です。
ここでは、MCU-Link を用いたデバッガについて、その起動方法と代表的な操作について紹介します。
「バイナリ (.bin) の書き込みと実行 」で解説した MCU-Link を用いた書き込みと書き込んだプログラムが実行できた前提で記載します。 デバッガの詳しい利用方法については gdb や Eclipse の解説を参考にして下さい。 デバッガの本質として、その動作や実行出来る範囲などに制約があります。こういった制限の範囲やその詳細については当社からはご案内できません。 デバッガ画面について デバッガを開始する際に、MCUXpresso (Eclipse) の画面レイアウトを Develop perspective するようなダイアログボックスが出現する場合があります。このダイアログボックスでは [Switch] を押して切り替えます。切り替えたくない場合は [Remember my decision]を☑したうえで [No] ボタンを押します。
Debugレイアウトへの変更ダイアログ
画面レイアウトは作業の内容に応じて効率的なものがありますので、レイアウト変更の操作に慣れておくことをおすすめします。(参考:画面レイアウトについて )
画面レイアウト関連でよく使用するものは以下です。
C/C++ Perspective : [Window]>[Perspective]>[Open Perspective] より選択 Develop Perspective : Debug Perspective : [Window]>[Perspective]>[Open Perspective] より選択 Breakpoints view : Debug Perspective 内にあります。または、メニューより [Window]>[Show View]>[Others…]>[Debug/Breakpoints] を選択 デバッグ前のプロジェクト設定 通常はデバッグを行う場合はプロジェクトのビルド設定で Debug を選択します。Release はデバッグシンボルが含まれませんので、ソースコードを参照したデバッグは行なえません。
また、TWENETライブラリ内のコードも含めてデバッグする場合、これらのプロジェクトを開いておいたほうがスムーズにデバッグできます。([Project Explorer] より TWENTExxx のプロジェクトを選択しておいてから、右クリックメニューより[Open Projecty])
設定済みのブレークポイント 初回利用では設定済みのブレークポイントはないはずですので考慮する必要はありませんが、使用中に経験するトラブルの対処ですので最初に記載しておきます。
デバッガの起動が期待通りではない(main()の先頭で停止しない)場合は、デバッガ起動前に設定済みのブレークポイントを一度すべて削除したり無効化 してみてください。現在のソースと実行バイナリと過去に設定したブレークポイントが矛盾を起こして、デバッガが正常に始動できない場合があります。
デバッガの開始 プログラムファイル .bin の書き換えと、デバッガの起動の操作については大きくは違いません。エラー発生時の対処など含め、「バイナリ (.bin) の書き込みと実行 」を参照して下さい。
最初に Debug 構成でビルドを行いエラーがないことを確認します。 [MCUXpresso IDE - Quick Start Panel] 上の [Debug] ボタンを押します。デバッグ・アイコン
デバッグ用のプログラム書き込みが終了すると main() 関数の先頭でブレークします。(※ デバッガの設定を変更していない場合)デバッグ-main()
デバッガの操作 ブレークポイントの設定 ソースコードのエディタ上で、ブレークポイントの設定と設定解除を行えます。
ブレークポイント
ソースコードのエディタ上でメニューより [Run]>[Toggle Breakpoint] を選択する方法もあります。
また、Breakpoints View で、ブレークポイント一覧を確認できます。
Breakpoints View
実行の制御 ステップ実行など実行の制御に関連する操作は、メニューより [Run] を開きます。
Runメニュー
通常はキーボードの操作で行う場合が多いので、よく使用するキーを列挙します。
キー F5 Step Into その行にある関数などもステップごとに実行する。 F6 Step Over 次の行まで実行するステップ実行する。 F7 Step Return 現在の関数の Return まで実行する。 F8 Resume 実行を再開する(次のブレークまで実行を継続)。 Ctrl+R Run to Line 選択中の行まで実行する。
中断・終了 デバッガの中断はメニューより [Run]>[Terminate] または Ctrl+F2 です。
便利な機能 各Viewの表示はメニューより [Window]>[Show View]>[Other…] より開けます。
Variables : ローカル変数の確認 Breakpoints : ブレークポイント一覧 Expressions : 変数等のウォッチ式、値の確認 Global Variables : グローバル変数のウォッチ式、値の確認 Heap and Stack Usage : ヒープ、スタック状態 Memory: メモリ領域のダンプ Peripherals: ペリフェラルレジスタの値の確認 Registers: CPU のレジスタ情報の確認 トラブルシューティング スリープ復帰後に反応しない スリープ復帰時の動作をデバッグすることは原則不可能です。
デバッグ時には、アプリケーションではスリープさせず、スリープに見立てた実行中のコードで代替するなど対応が必要です。
直前動いていたがデバッガが開始しない MCUXpresso を終了し、デバッガの USB の抜き差しを行って下さい。それでも改善しない場合は、PCの再起動、.launchファイルの削除を行ってください。
Debug のアイコンがグレーになっていて押せない TWENETxxx ライブラリのファイルが開かれているような場合は、そのライブラリが [Project Explorer] でも選択された状態になっています。そのライブラリ自体は直接デバッグできるプロジェクトでは有りません。アプリケーションのプロジェクトを選択して [Debug] ボタンを操作します。
Peripherals タブに何も表示されない MCUXpresso の状況によって表示されないことがあります。MCUXpresso を一旦終了して再度起動することで改善することがあります。
SWO を使用したい 本機能はサポート問い合わせ対象外です
SWOは、高速にマイコンの情報を取り出すための仕組みで、低コストのデバッグメッセージの出力、マイコンの関数呼び出しや割り込み状況などを観察できます。
当社で評価する限り、JN5189上ではデバッガの起動が安定しないといった利用に難があるため積極的な紹介はしませんが、printf について (デバッグ, シリアル出力) に、当社で把握する限りの情報とTWENETライブラリ内の定義や記述について解説しています。
関連資料 1.6.7 - プロジェクトのビルド プロジェクトのビルド
プロジェクトのビルドについて解説します。
プロジェクトのビルド プロジェクトのビルドはいくつかの方法で行えます。
MCUXpresso IDE 上でのビルド: MCU-Linkによるデバッグを行う場合など。半導体メーカがメンテナンスしているため、特有の機能が利用できます。ただし TWELITE での実装は、半導体メーカの標準的な想定と違う場合もありますので、すべての機能が利用できるわけではありません。 make によるビルド: 従来と同様のビルド方法です。いくつかのツールから make を呼び出せるようにしています。MCU-Linkデバッガは利用できません。TWELITE STAGE アプリ : ビルドから書き込み、実行までを行うユーティリティです。対象プロジェクトをVSCodeにて開く機能もあります。 VSCode : コード解釈のための定義とビルド(make)のためのTaskが定義されています。提供されるアプリ・サンプルには VSCode用の定義がないものもあります。事前に環境変数の設定が必要で、Windows向けに環境変数の設定を行いつつVSCodeを起動するためのバッチファイルやスクリプトを用意しています。 Windows 上のコマンドウインドウ (bash): 必要な環境変数の設定が行われた bash や cmd.exe を起動するためのバッチファイルを用意しています。 Windows上のWSL上から、上記の Windows 上の make ユーティリティを呼び出すためのバッチファイルやスクリプトを準備しています。 MCUXpressoの場合 標準画面レイアウト(C/C++ Perspective) を前提に解説します。(参考:画面レイアウトについて )
ここでは、プロジェクトをビルドし、マイコン上で動作する実行バイナリ (.bin) を生成します。
まず最初にビルドしたいプロジェクトを [Proejct Explorer] で開いておきます。
プロジェクトを開く
TWENET ライブラリを開く場合と閉じておく場合で振る舞いが違います。
TWENETライブラリを開いておくと、必要であればライブラリの再ビルドを行います。デバッグを行うような場合は、ライブラリコードを開くことも多いため、開いておくことを推奨します。 TWENETライブラリを閉じておくと、ライブラリの再ビルドは行わないためビルド工程は短く済みます。 ビルドを行うには対象のプロジェクトが開かれた状態で金槌のアイコンからビルド構成を選択します。
金槌アイコン
ビルド関連の操作方法は複数あります。以下に例を挙げますが、詳しくは Eclipse のマニュアルを参照下さい。
選択中のビルド定義でのビルドMCUXpresso QuickStart Panel 中の[Build]アイコンをクリックする メニューより [Project]>[Build Project] を選択する [Project Explorer]でプロジェクトの最上位フォルダを右クリックメニューより [Build Project] を選択する 選択中のビルド定義でのクリーン(中間ファイルを削除)MCUXpresso QuickStart Panel 中の[Clean]アイコンをクリックする メニューより [Project]>[Clean…] を選択する [Project Explorer]でプロジェクトの最上位フォルダを右クリックメニューより [Clean Project] を選択する ビルドを実行すると [Console] にビルド経過が表示されます。
ビルド時のコンソール画面
ビルドが成功したかどうかは、エラーメッセージの有無と .bin ファイルの生成で確認して下さい。
arm-none-eabi-g++ -nostartfiles -nostdlib -s ... <=== リンカ
Memory region Used Size Region Size %age Used
FLASH_PROGRAM: 72184 B 640 KB 11.01%
SRAM: 40516 B 89056 B 45.49%
SRAM_USER: 0 GB 32 KB 0.00%
SRAM_AUX: 0 GB 16 KB 0.00%
SRAM_HEAP_FIXED: 0 GB 8 KB 0.00%
SRAM_STACK: 8 KB 8 KB 100.00%
SRAM_MAC: 0 GB 1 KB 0.00%
Finished building target: App_Twelite.axf
Performing post-build steps
sh ../scripts/dk6_image.sh "App_Twelite.axf" "App_Twelite" ...
--- Image information --- <=== elf形式のオブジェクト
text data bss dec hex filename
71944 240 48196 120380 1d63c App_Twelite.axf
--- Check Python command --- <=== イメージ署名で使う Python のチェック
Python 3.9.9
--- dk6_imag_tool.py --- <=== イメージ署名
AXF image signature: py.exe -3 ../scripts/dk6_image_tool.py -s 294912 "App_Twelite.axf"
No compatibility list
boot block offset = 119f8
Writing checksum 04030a54 to file App_Twelite.axf
Writing CRC32 of header 3ab5fee4 to file App_Twelite.axf
Binary size is 00011a18 (72216)
--- Generate bin --- <=== .bin を生成
copy from `App_Twelite.axf' [elf32-littlearm] to `App_Twelite.bin' [binary]
VSCodeの場合 MWSDKに附属するアプリやサンプルコードのプロジェクトディレクトリには .vscode ディレクトリが含まれますが、いくつかの環境変数の設定 が必要です。(.vscodeディレクトリが準備されていないプロジェクトもあります)
環境変数を設定してVSCodeを起動する方法は以下です。
TWELITE STAGE の設定で VS Code で開くオプションを指定し、TWELITE STAGE から該当のプロジェクトを開く。 Windows: MWSDK/scripts/WIN_CODE.cmd から起動する。(事前に code コマンドで VSCode が立ち上がるようにインストール作業を済ませておく必要があります。実行後、コマンドプロンプトの画面が表示されたままになります) Windows: MWSDK/scripts/WIN_CODE.cmd からコマンドプロンプトを表示し、code コマンドを実行する。(事前に code コマンドで VSCode が立ち上がるようにインストール作業を済ませておく必要があります) Windows: MWSDK/scripts/WIN_WSL.cmd から WSL プロンプトを表示し、mwcode.shコマンドを実行する。(WSL の事前インストールが必要です。サポート問い合わせ外の方法です。内容は mwcode.sh を直接参照してください) 環境変数 内容 例 MWSDK_ROOTMWSDKのルートディレクトリ C:/Work/MWSTAGE/MWSDK/MWSDK_ROOT_WINNAME上記、Windows名 C:\Work\MWSTAGE\MWSDK\MWSDK_TWENET_LIBSRCライブラリへのディレクトリ C:/Work/MWSTAGE/MWSDK/TWENET/current/MWSDK_MAKE_JOBS並列ジョブ数 -j8MWSDK_MAKE_DISABLE_LTOLTOの有無 DISABLE_LTO=1またはDISABLE_LTO=0
VSCode上で推奨されるプラグイン C/C++ C/C++ Extension Pack VSCode 上の操作 C/C++ Configuration (下部ステータスバー右下に TWELITE ??? のように表示されている) ⇒ コード解釈の対象を選択します。(TWELITE BLUE/RED/GOLD)エディタ上のコード解釈はあくまでも編集の作業性の目的です。コンパイル時に発生するエラーとは通常一致せず、エディタ上のコード解釈のエラーは参考までにとどめてください。 GOLDでのコード解釈においては解釈エラーが多く出る場合があります。作業性が悪い場合はBLUE/REDの設定にするのも選択肢です。 Terminal メニューから Run Task… ⇒ ビルドやクリーンを行う。 コマンドラインの場合 または このバッチファイルは実行に必要な環境変数を設定します。
bashの場合 MWSDK/scripts/WIN_BASH.cmd (msys bash)を実行します。
以下のような画面が表示されます。MyName@MyPC から始まる行はインストール状況によって変わります。
MyName@MyPC /c/Work/MWSTAGE/MWSDK
MWSDK$ Act_samples/BRD_APPTWELITEをビルドする場合は、以下のような操作を行います。
MyName@MyPC /c/Work/MWSTAGE/MWSDK
MWSDK$ cd Act_samples/BRD_APPTWELITE/build
MyName@MyPC /c/Work/MWSTAGE/MWSDK/Act_samples/BRD_APPTWELITE/build
MWSDK$ make TWELITE= GOLD
...
!!!TARGET= BRD_APPTWELITE_GOLD_L1305_V0-2-1.bin
MyName@MyPC /c/Work/MWSTAGE/MWSDK/Act_samples/BRD_APPTWELITE/build
MWSDK$ cmd.exeの場合 MWSDK/scripts/WIN_CMD.cmd (Windows の cmd.exe) を実行します。
Microsoft Windows [Version 10.0.22621.1848]
(c) Microsoft Corporation. All rights reserved.
C:\Work\MWSTAGE\MWSDK>
Act_samples/BRD_APPTWELITEをビルドする場合は、以下のような操作を行います。
C:\Work\MWSTAGE\MWSDK>cd Act_samples\BRD_APPTWELITE\build
C:\Work\MWSTAGE\MWSDK\Act_samples\BRD_APPTWELITE\build>make TWELITE=GOLD
...
!!!TARGET=BRD_APPTWELITE_GOLD_L1305_V0-2-1.bin
C:\Work\MWSTAGE\MWSDK\Act_samples\BRD_APPTWELITE\build>
WSL からのビルド 本機能は、サポート問い合わせ対象外です
Linux上でのビルドではなくWindows上のビルド環境をWSLから呼び出すためのスクリプトを用意しています。
事前に WSL が動作するようにインストールを済ませておきます。
MWSDK/scripts/WIN_WSL.cmd を実行します。WSLのコマンドウインドウが表示されます。
MyName@MyPC /mnt/c/Work/MWSTAGE/MWSDK
$ Act_samples/BRD_APPTWELITEをビルドする場合は、以下のような操作を行います。
MyName@MyPC /mnt/c/Work/MWSTAGE/MWSDK
$ cd Act_samples/BRD_APPTWELITE/build/
MyName@MyPC /mnt/c/Work/MWSTAGE/MWSDK/Act_samples/BRD_APPTWELITE/build
$ mwbash.sh make TWELITE= GOLD
...
!!!TARGET= BRD_APPTWELITE_GOLD_L1305_V0-2-1.bin
MyName@MyPC /mnt/c/Work/MWSTAGE/MWSDK/Act_samples/BRD_APPTWELITE/build
$ mwbash.shは上述のbash環境からmakeを実行するためのスクリプトです。
参考: Windows 用の VSCode を起動するための mwcode.sh も用意しています。第一引数に.vscodeが格納されているプロジェクトフォルダを指定します。
MyName@MyPC /mnt/c/Work/MWSTAGE/MWSDK/Act_samples/BRD_APPTWELITE
$ mwcode.sh .
1.6.8 - プロジェクトの構成と設定 プロジェクトの構成と設定
プロジェクトの構成と設定について解説します。
プロジェクトの構成と設定 最初に TWELITE の標準アプリケーション App_Twelite を例にプロジェクト構成と重要な設定について解説します。MCUXpresso の [Project Explorer] より App_Twelite プロジェクトを選択してください。
App_Twelite/ : ソースコードの格納場所
Common/ : ソースコードの格納場所
build/ : ビルド関連のファイルをまとめて格納
scripts/ : ビルドのポスト処理で .bin に署名データを埋め込むスクリプト
linkscripts/ : リンカ定義
Release/ : Release ビルドを行うと中間ファイルや生成物が保存される
Debug/ : Debug ビルドを行うと中間ファイルや生成物が保存される
MCUXpresso での設定画面 メニューより [Project]>[Properties] (または Project Explorer でプロジェクトの最上位フォルダを右クリックメニューより [Properties])を選択すると以下のような設定画面が出ます。以降はその設定画面条の確認や操作について触れます。
C/C++ Settings
ビルド対象のソースコード ビルド対象のソースコードは、MCUXpresso での定義を行うことで追加・削除が可能です。新しく追加したディレクトリは通常はビルド対象になります。
※ ビルド対象から除外する場合は、対象ディレクトリを右クリックメニューより [Properties..]>[C/C++ Build] を選択し、[Configuration]を[All Configurations]として [Exclude resource from build] をチェックします。
ビルドコンフィギュレーション (Release/Debug) ビルド定義については Release, Debug の2種類を定義しています。
Release : 最適化を実行した実行用のビルド定義 Debug : デバッグシンボル付きのビルド。PRINTFマクロによる出力にも対応 注:この定義名を用いて、ライブラリファイルの格納ディレクトリを指定しているため、ビルド定義を新しく作成した場合にはプロジェクト定義の調整が必要です。( [Properties..]>[C/C++ Build]>[Settings]>[MCU C++ Linker/Libraries] で "${workspace_loc:/TWENETxxx}/${ConfigName}" の ${ConfigName} の部分が Release や Debug に置き換わります)
Build Variables [C/C++Build]>[Build Variables] にはコンパイルに必要な情報(バージョン番号)を定義しています。
定義 値 内容 VERSION_MAIN必須 [0..255] バージョン番号(メイン) VERSION_SUB必須 [0..255] バージョン番号(サブ) VERSION_VAR必須 [0..255] バージョン番号(バリエーション) DK6_PY通常は設定不要 スクリプト実行のための python 実行コマンド (例: py.exe -3.7)py.exe -3 または python3 が使用される。
MCU Settings… MCU設定では JN5189 が選択されています。
このページにはRAM領域のメモリマップが表示されますが、MUCXpressoの設定はビルドには反映されません 。詳しくはRAMの割当 を参照下さい。
MCU Settings
インクルードパス ソースファイルのインクルードパスを設定しています。TWENETxxx (xxxはライブラリ名) ライブラリについても、この設定をしないとビルドが出来ません。
プロジェクト定義には冗長な設定が含まれます (mwx ライブラリを使用しないプロジェクトにパスが通っているなど)。 設定は "${workspace_loc:/TWENETxxx}" のようにワークスペースを起点とした定義です。TWENETxxx というディレクトリがあってもプロジェクトとして登録されていないと、そのディレクトリは検索対象になりません。かならずライブラリもワークスペースのプロジェクトとして追加しておいて下さい。 インクルードパスは以下で設定します。構成(Release/Debug)ごとに設定が別になっているので注意して下さい。
[Properties..]>[C/C++ Build]>[Settings]>[MCU C++ Compiler]>[Includes] (C++ソースファイル) [Properties..]>[C/C++ Build]>[Settings]>[MCU C Compiler]>[Includes] (C++ソースファイル) 多くのプロジェクトでは以下のディレクトリが追加されています。
${ProjName}/${ProjName}
${ProjName}/Common
TWENETcmpt/source
TWENETcore/source
TWENEText/source
TWENETmcu
TWENETmcu/CMSIS
TWENETmcu/board
TWENETmcu/component
TWENETmcu/component/lists
TWENETmcu/component/uart
TWENETmcu/component/serial_manager
TWENETmcu/device
TWENETmcu/drivers
TWENETmcu/framework
TWENETmcu/framework/Common
TWENETmcu/startup
TWENETmcu/uMac
TWENETmcu/utilities
TWENETmcu/printf
TWENETmwf/source
TWENETmwx/source
TWENETstgs/source
TWENETutils/source
先頭の2つは、${ProjName} はプロジェクトディレクトリ名で App_Twelite の場合は App_Twelite/App_TweliteとApp_Twelite/Commonの2つを指定しています。プロジェクトで参照するライブラリやソースコードのディレクトリ配置に応じて編集します。
プリプロセッサ定義 プリプロセッサ定義は以下で設定します。構成(Release/Debug)ごとに設定が別になっているので注意して下さい。
[Properties..]>[C/C++ Build]>[Settings]>[MCU C++ Compiler]>[Preprocessors] (C++ソースファイル) [Properties..]>[C/C++ Build]>[Settings]>[MCU C Compiler]>[Preprocessors] (C++ソースファイル) 一部の定義について解説します。
定義 値 内容 VERSION_MAIN${VERSION_MAIN}[Build Variable]の設定値を引用 VERSION_SUB${VERSION_SUB}[Build Variable]の設定値を引用 VERSION_VAR${VERSION_VAR}[Build Variable]の設定値を引用 CPU_JN518XTWELITE GOLD(JN518x)のビルド時に設定。機種別コード記述に利用。 TOCONET_DEBUG0または1TWENET の内部向けデバッグ出力の制御 (1で有効になる)。この設定はアプリケーション、TWENETcore、TWENEText全てで同じ定義でビルドする。 T_ENUM_INTint16_tTWENET で用いる teEvent, teStateの定義型 (従来は enum でコンパイルオプションで 16bit 長としていたが、ARM上のビルド、C++の共存の2点を考慮し int16_t型とした) SDK_DEBUGCONSOLE0..2printfについて 参照SERIAL_PORT_TYPE_SWO0または1printfについて 参照DEBUGまたはNDEBUGデバッグビルドまたはリリースビルドの指定
バージョンの指定 TWENETで記述されたビルド定義には Makefile 中に VERSION_MAIN VERSION_SUB VERSION_VAR を定義して、コード中で同名のプリプロセッサ定義 (例:-DVERSION_MAIN=1)としています。コード中にもこれらの定義がないとビルドが失敗します。
MCUXpressoでは Eclipse のビルドマクロ [Properties..]>[C/C++ Build]>[Build Variable] に定義して、コンパイラに定義を渡しています。
Debug での定義 多くのプロジェクトでは以下のように定義されています。
VERSION_MAIN=${VERSION_MAIN}
VERSION_SUB=${VERSION_SUB}
VERSION_VAR=${VERSION_VAR}
CPU_JN518X
JN5189=5189
JENNIC_CHIP_FAMILY_JN518x
JENNIC_CHIP=JN5189
JENNIC_CHIP_JN5189
JENNIC_CHIP_FAMILY_NAME=_JN518x
TOCONET_DEBUG=1
T_ENUM_INT=int16_t
__MCUXPRESSO
__USE_CMSIS
CPU_JN5189THN
CPU_JN5189THN_cm4
SDK_DEBUGCONSOLE=1
SERIAL_PORT_TYPE_SWO=0
DEBUG
Release での定義 多くのプロジェクトでは以下のように定義されています。
VERSION_MAIN=${VERSION_MAIN}
VERSION_SUB=${VERSION_SUB}
VERSION_VAR=${VERSION_VAR}
CPU_JN518X
JN5189=5189
JENNIC_CHIP_FAMILY_JN518x
JENNIC_CHIP=JN5189
JENNIC_CHIP_JN5189
JENNIC_CHIP_FAMILY_NAME=_JN518x
T_ENUM_INT=int16_t
__MCUXPRESSO
__USE_CMSIS
CPU_JN5189THN
CPU_JN5189THN_cm4
SDK_DEBUGCONSOLE=2
NDEBUG
リンカー シンボルの繰り返し探索 ライブラリの依存関係が複雑になっているため、ld コマンドの --start-group --end-group を用いた繰り返し探索(依存シンボルの順序により未解決になる場合があるため、すべて解決するまで探索を繰り返す指定)を有効にしています。定義内容は [Properties..]>[C/C++ Build]>[MCU C++ Linker] の [Command line pattern:] を参照下さい。
リンクすべきライブラリ リンク対象のライブラリは [Properties..]>[C/C++ Build]>[Settings]>[MCU C++ Linker] > [Libraries] に設定します。
注:ライブラリの検索パス(Library search path)は、${ConfigName}をビルド定義名(Release/Debug)として"${workspace_loc:/TWENETxxx}/${ConfigName}"のような記述になっています。ビルド定義を作成した場合は修正が必要になります。
TWENETライブラリの詳細:ライブラリ・アプリなど マイコン用ライブラリ (TWENETmcu/libs に格納)MiniMac : IEEE802.15.4 の処理を行う MAC 層 (少機能コンパクト版) Radio : 無線物理層部分の処理 arm_cortexM4l_math : (必須でない) ARM 提供の算術ライブラリ リンクスクリプト 実行形式(.bin)を生成するにあたり、メモリマップなどの定義を行うリンクスクリプトは TWENETmcu/linker/linkscripts/JN5189 に格納しています。
その他のビルド設定 [Properties..]>[C/C++ Build] には [Builder Settings], [Behavior], [Refresh Policy] のタブがありますが、通常編集の必要はありません。
[Behavior] タブでは並列ビルドの並列数を設定できます。過剰なCPU数割当がある場合は減らしてみて下さい。 [Properties..]>[C/C++ Build]>[Settings]には[Build Steps], [Build Artifact], [Binary Parsers], [Error Parser] がありますが、通常編集の必要はありません。
[Build steps] では、リンカ実行後の .bin バイナリファイルの生成を行っています。
MCUXpresso 標準の定義を書き換え、以下のように dk6_image.sh を呼び出すようにしています。標準に対して特別な処理は追加していませんが、過程で使用する Python スクリプトの指定や、エラー処理の強化などを目的としています。
sh '${workspace_loc:/TWENETmcu}/linker/scripts/dk6_image.sh' " ${ BuildArtifactFileName} " " ${ BuildArtifactFileBaseName} " DK6_PY= "\" ${ DK6_PY} \"" DK6_OPTS= "\" ${ ENV_IMAGE_TOOL_OPTS} \"" 1.6.9 - ライブラリ・アプリなど TWENETライブラリ、アプリの解説
TWENETライブラリ、アプリの解説を TWELITE GOLD の話題を中心に行います。
ライブラリ・アプリなど TWELITE GOLDでは、TWELITE BLUE/RED の開発コードと比較的近いふるまいをするライブラリを準備しています。
TWELITE BLUE/RED では、半導体メーカーから供給される AHI API と AppAPI を基本に、utils や TWENET C API、また MWX ライブラリを構成します。
[TWENET C++ API/MWX ] setup(), loop() style API on C++
[utils][TWENET C API ] lagacy C library
[AHI API ][AppAPI ]
--------------------------------
[MCU PERIPHERAL ][MAC LAYER] HARDWARE
TWELITE GOLDでは、半導体メーカより提供されるライブラリは FSL ライブラリとなり、TWELITE BLUE/REDとの互換性はごく限定的です。既に当社で実装されたコードを比較的小さい修正で動作させるため、TWENETcmpt ライブラリを作成しています。TWENETcmpt は、直接 FSL ライブラリを呼び出すことは最小限にし、ペリフェラル等の手続きを抽象化した TWENETmwf ライブラリにより実装されています。
[TWENET C++ API/MWX ]
[TWENET C API ]
[TWENETutils]
[TWENETcmpt - AHI ]
[TWENETmwf C++ LIB ]
[App API ]
[FSL LIBRARY ][MiniMac ]
---------------------------------------------
[MCU PERIPHERAL ][MAC LAYER]
TWENETmwf - FSLライブラリの手続きをまとめたC++ライブラリ。 TWENETcmpt - TWENETmwf ライブラリを用いて実装した AHI 互換関数群。 TWENETutils - BLUE/RED での utils に相当する。UARTなど一部はFSLライブラリにより直接実装されている。 MiniMac と AppAPI - 半導体メーカが提供しているソースコード非開示のライブラリ。マイコン半導体のMAC層を取り扱う直接のAPIはMiniMacという名前のライブラリで、MiniMac を用いてAppAPI互換APIが提供されている。 FSL ライブラリ - 半導体メーカが提供しているソースコード開示のライブラリ。主にペリフェラルを取り扱うための手続き。 TWENETライブラリ一覧 名前 解説 TWENETmwx setup()/loop()スタイルの記述を行うためのC++ライブラリ。TWENETeastl EASTL ライブラリ。(C++ のテンプレートライブラリで、コンテナ・イテレータ・アルゴリズム, アクト Act 記述で併用を想定) TWENETstgs 主に設定を管理するためのCライブラリ。 TWENETcmpt TWELITE BLUE/REDの記述に用いられる AHI ライブラリ利用ソースコードの移植を目的とした中間ライブラリ。(TWENETmwf を用いています) TWENETmwf マイコンペリフェラルを扱うための fsl ライブラリを用い、必要機能をまとめたC++ライブラリ。 TWENETcore TWENETのコアライブラリ(ソースは含まれません) TWENEText TWENETのコアライブラリ2(ソースは含まれません) TWENETutils ペリフェラルなどベースライブラリ。UART対応のための serial, uart 関数群も含まれる。 TWENETmcu main()やマイコン、ペリフェラルライブラリ関数など。
TWELITE Apps, Samples TWELITE Apps のプロジェクトをビルドしています。TWELITE GOLD特有の動作状況について制限がある場合は、プロジェクトディレクトリ直下の README.md の LIMITATIONS 項目に記載します。LIMITATION については、ハードウェアの制限によるもの、当社の対応予定がないものなどが含まれます。
必須ライブラリ: TWENETmcu, TWENETutils, TWENETcore, TWENEText, TWENETmwf, TWENETcmpt 一部で利用するライブラリ: TWENETstgs Act による記述についてのサンプルコードについてのTWELITE GOLD特有の動作状況について制限がある場合は、プロジェクトディレクトリ直下の README.md の LIMITATIONS 項目に記載します。LIMITATION については、ハードウェアの制限によるもの、当社の対応予定がないものなどが含まれます。
必須ライブラリ: TWENETmcu, TWENETutils, TWENETcore, TWENEText, TWENETmwf, TWENETcmpt, TWENETstgs, TWENETmwx EASTL のビルド定義が含まれるのは Act_Unit_EASTL と Act_Template です。他のサンプルにはインクルードパスやライブラリの指定がありません。 MCUXpresso のワークスペースについて MWSDKインストール先のディレクトリ (.../MWSTAGE/MWSDK)にある current フォルダ直下に上記ライブラリが格納されています。
MCUXressoで File>Import… を選択し出現したダイアログボックス内で General>Existing Projects into Workspace を選択して [Next] ボタンを押します。続くダイアログで先ほどの current フォルダを指定すると、上述の TWENET??? ライブラリが列挙されますので上記のライブラリすべてを追加しておきます。
新しいプロジェクトの作成 新規プロジェクトは既存のプロジェクトを MCUXpresso 上でインポートしてから名前を変更します。
プロジェクト コピー元 備考 C言語かつAHI互換ライブラリ利用App_Twelite, App_Wingsなど App_TweliteC++ソースの追加も可能ですが、定義等の修正が必要になる場合があります。 アクト(Act) Act_MYPROJ_template.zipsetup(), loop()スタイルのコード。C++前提です。プロジェクトアーカイブを用意しています。
インポート済みのプロジェクトをもとに新しくプロジェクトを作成したい場合の操作例です。
既存のプロジェクトのバックアップを取るか Export メニューよりアーカイブを作成しておく。 既存のプロジェクトの名前を変更する。 1.でバックアップしたプロジェクトを再度インポートする。 2 - Pythonによるファームウェアの書き込み TWELITE のファームウェア書き込みを行うPythonモジュール(ベータ版)
tweliter モジュールは、TWELITE のファームウェアを書き込むためのPythonモジュールです。PyPIからインストールでき、コマンドラインツールとして使用できるほか、Pythonスクリプトから制御することもできます。
2.1 - Pythonによるファームウェアの書き込み 最新版
概要 tweliter モジュールは、TWELITE のファームウェアを書き込むためのPythonモジュールです。
PyPI からインストールでき、コマンドラインツールとして使用できるほか、Pythonスクリプトから制御することもできます。
インストール方法 PyPI からインストールしてください。
Poetryなら
Linux における追記事項
udevルールの設定udevによって権限を与える必要があるかもしれません。
/etc/udev/rules.d/99-ftdi.rules を作成します
# TWELITE R / MONOSTICK (FT232R / 0403:6001)
SUBSYSTEM== "usb" , ATTRS{ idVendor}== "0403" , ATTRS{ idProduct}== "6001" , MODE= "0666"
# TWELITE R2 / R3 (FT230X / 0403:6015)
SUBSYSTEM== "usb" , ATTRS{ idVendor}== "0403" , ATTRS{ idProduct}== "6015" , MODE= "0666" udev ルールを更新します
sudo udevadm control --reload-rules
sudo udevadm trigger また、TWELITE STAGE アプリでは ftdi_sio モジュールのアンロードが必要 ですが、Pythonで使用する際はこれをロードする必要があります。
modprobe usbserial
modprobe ftdi_sio Windows における追記事項
libusbドライバの適用No backend available といったエラーを発する場合は、libusb-win32 ドライバを適用することで解消できるかもしれません。Zadig を導入し、TWELITE R や MONOSTICK を選択したうえで libusb-win32 (WinUSBでない)を適用してください。
参考:Installation — PyFtdi documentation (pyftdiモジュールを使用しています)
使用例 コマンドラインツールとして tweliter に続いて、バイナリファイル(.bin)を指定します。
tweliter dir/SomeApp_BLUE.bin
BLUE シリーズと RED シリーズを間違えないようにしてください。
コマンドラインオプション
tweliter -h
usage: tweliter [ -h] [ -u URL] [ -t TYPE] [ -g] [ -v] [ -s] [ -m STARTMSG] [ -r RETRY] [ --clear] [ file]
Write TWELITE series firmware
positional arguments:
file Firmware file to write ( not required with --clear)
options:
-h, --help show this help message and exit
-u URL, --url URL Optional device URL starting with ftdi://
-t TYPE, --type TYPE Device type( s) , comma-separated. e.g., TWELITE_R3,MONOSTICK
-g, --gold Select GOLD series
-v, --verify Verify firmware after writing
-s, --safe Safe mode ( GOLD series only, write slowly)
-m STARTMSG, --startmsg STARTMSG
Prefix for startup message to check
-r RETRY, --retry RETRY
Retry count in case of firmware writing failure
--clear Clear application NVM memory ( GOLD only) u url:FTDIデバイスを指定するためのURL を指定できます未指定では、接続されたFTDIデバイスが一点なら自動選択、複数なら選択を促します t type:複数のデバイスを絞り込むための種別を指定できますカンマ区切りで指定します。例えば TWELITE_R3,MONOSTICKなど。 g gold:GOLDシリーズを指定しますv verify:書き込み後に検証を行いますs safe:(GOLDシリーズのみ)転送速度を下げるセーフモードを適用しますm startmsg:完了後、指定したテキスト以降の起動メッセージを捕捉して表示しますr retry:書き込みに失敗したときに指定した数のリトライを行いますclear:(GOLDシリーズのみ)不揮発性メモリの値を消去します(設定値など)スクリプトから Tweliteクラスのインスタンスを利用してください。
from pathlib import Path
from tweliter import Tweliter
file = Path("firmware/SomeApp_BLUE.bin" )
try :
with Tweliter(
type_filter= Tweliter. Type. TWELITE_R2 | Tweliter. Type. TWELITE_R3
) as liter:
# Get serial interface
ser = liter. get_serial_instance()
# Write firmware
liter. write(ser, file, verify= True )
# Show startup message
print(liter. get_startup_message_after(ser, "!INF" ))
except IOError as e:
print(f "Couldn't connect { e} " )
except RuntimeError as e:
print(f "Failed to write { e} " ) 2.2 - Pythonによるファームウェアの書き込み v0.3.7
概要 tweliter モジュールは、TWELITE のファームウェアを書き込むためのPythonモジュールです。
PyPI からインストールでき、コマンドラインツールとして使用できるほか、Pythonスクリプトから制御することもできます。
インストール方法 PyPI からインストールしてください。
Poetryなら
Linux における追記事項
udevルールの設定udevによって権限を与える必要があるかもしれません。
/etc/udev/rules.d/99-ftdi.rules を作成します
# TWELITE R / MONOSTICK (FT232R / 0403:6001)
SUBSYSTEM== "usb" , ATTRS{ idVendor}== "0403" , ATTRS{ idProduct}== "6001" , MODE= "0666"
# TWELITE R2 / R3 (FT230X / 0403:6015)
SUBSYSTEM== "usb" , ATTRS{ idVendor}== "0403" , ATTRS{ idProduct}== "6015" , MODE= "0666" udev ルールを更新します
sudo udevadm control --reload-rules
sudo udevadm trigger また、TWELITE STAGE アプリでは ftdi_sio モジュールのアンロードが必要 ですが、Pythonで使用する際はこれをロードする必要があります。
modprobe usbserial
modprobe ftdi_sio Windows における追記事項
libusbドライバの適用No backend available といったエラーを発する場合は、libusb-win32 ドライバを適用することで解消できるかもしれません。Zadig を導入し、TWELITE R や MONOSTICK を選択したうえで libusb-win32 (WinUSBでない)を適用してください。
参考:Installation — PyFtdi documentation (pyftdiモジュールを使用しています)
使用例 コマンドラインツールとして tweliter に続いて、バイナリファイル(.bin)を指定します。
tweliter dir/SomeApp_BLUE.bin
BLUE シリーズと RED シリーズを間違えないようにしてください。
コマンドラインオプション
tweliter -h
usage: tweliter [ -h] [ --url URL] [ --verify] [ --startmsg STARTMSG]
[ --retry RETRY]
file
Write TWELITE BLUE/RED firmware
positional arguments:
file Firmware file to write
options:
-h, --help show this help message and exit
--url URL Device URL starting with ftdi://
--verify Verify firmware after writing
--startmsg STARTMSG Prefix for startup message to check
--retry RETRY Retry count in case of firmware writing failure url:FTDIデバイスを指定するためのURL を指定できます未指定では、接続されたFTDIデバイスが一点なら自動選択、複数なら選択を促します verify:指定すると、書き込み後にベリファイを行いますstartmsg:完了後、指定したテキスト以降の起動メッセージを捕捉して表示しますデフォルトは !INF MONO WIRELESS としています retry:数を指定すると、書き込みに失敗した際にその数だけリトライします。スクリプトから Tweliteクラスのインスタンスを利用してください。
from pathlib import Path
from tweliter import Tweliter
file = Path('dir/SomeApp_BLUE.bin' )
try :
with Tweliter(url= "ftdi://:ft-x:/1" ) as liter:
# Get serial interface
ser = liter. get_serial_instance()
# Write firmware
liter. write(ser, file, verify= True )
# Show startup message
print(liter. get_startup_message_after(ser, "!INF MONO WIRELESS" ))
except IOError as e:
print(f "Cannot connect { e} " )
except RuntimeError as e:
print(f "Failed to write { e} " ) 2.3 - Pythonによるファームウェアの書き込み v0.4.0
概要 tweliter モジュールは、TWELITE のファームウェアを書き込むためのPythonモジュールです。
PyPI からインストールでき、コマンドラインツールとして使用できるほか、Pythonスクリプトから制御することもできます。
インストール方法 PyPI からインストールしてください。
Poetryなら
Linux における追記事項
udevルールの設定udevによって権限を与える必要があるかもしれません。
/etc/udev/rules.d/99-ftdi.rules を作成します
# TWELITE R / MONOSTICK (FT232R / 0403:6001)
SUBSYSTEM== "usb" , ATTRS{ idVendor}== "0403" , ATTRS{ idProduct}== "6001" , MODE= "0666"
# TWELITE R2 / R3 (FT230X / 0403:6015)
SUBSYSTEM== "usb" , ATTRS{ idVendor}== "0403" , ATTRS{ idProduct}== "6015" , MODE= "0666" udev ルールを更新します
sudo udevadm control --reload-rules
sudo udevadm trigger また、TWELITE STAGE アプリでは ftdi_sio モジュールのアンロードが必要 ですが、Pythonで使用する際はこれをロードする必要があります。
modprobe usbserial
modprobe ftdi_sio Windows における追記事項
libusbドライバの適用No backend available といったエラーを発する場合は、libusb-win32 ドライバを適用することで解消できるかもしれません。Zadig を導入し、TWELITE R や MONOSTICK を選択したうえで libusb-win32 (WinUSBでない)を適用してください。
参考:Installation — PyFtdi documentation (pyftdiモジュールを使用しています)
使用例 コマンドラインツールとして tweliter に続いて、バイナリファイル(.bin)を指定します。
tweliter dir/SomeApp_BLUE.bin
BLUE シリーズと RED シリーズを間違えないようにしてください。
コマンドラインオプション
tweliter -h
usage: tweliter [ -h] [ -u URL] [ -g] [ -v] [ -s] [ -m STARTMSG] [ -r RETRY] file
Write TWELITE series firmware
positional arguments:
file Firmware file to write
options:
-h, --help show this help message and exit
-u URL, --url URL Optional device URL starting with ftdi://
-g, --gold Select GOLD series
-v, --verify Verify firmware after writing
-s, --safe Safe mode ( GOLD series only, write slowly)
-m STARTMSG, --startmsg STARTMSG
Prefix for startup message to check
-r RETRY, --retry RETRY
Retry count in case of firmware writing failure u url:FTDIデバイスを指定するためのURL を指定できます未指定では、接続されたFTDIデバイスが一点なら自動選択、複数なら選択を促します g gold:GOLDシリーズを指定しますv verify:書き込み後に検証を行いますs safe:(GOLDシリーズのみ)転送速度を下げるセーフモードを適用しますm startmsg:完了後、指定したテキスト以降の起動メッセージを捕捉して表示しますr retry:書き込みに失敗したときに指定した数のリトライを行いますスクリプトから Tweliteクラスのインスタンスを利用してください。
from pathlib import Path
from tweliter import Tweliter
file = Path('dir/SomeApp_BLUE.bin' )
try :
with Tweliter(url= "ftdi://:ft-x:/1" ) as liter:
# Get serial interface
ser = liter. get_serial_instance()
# Write firmware
liter. write(ser, file, verify= True )
# Show startup message
print(liter. get_startup_message_after(ser, "!INF" ))
except IOError as e:
print(f "Cannot connect { e} " )
except RuntimeError as e:
print(f "Failed to write { e} " ) 3 - TWELITE SPOT / ESP32 無線 LAN ゲートウェイを試作するためのキット
TWELITE SPOT は TWELITE 親機と ESP32 を搭載した、無線 LAN ゲートウェイを手軽に試作するためのキットです。
3.1 - 導入済みアプリケーションの概要 TWELITE SPOT にプリインストールされたアプリケーションの機能説明
TWELITE SPOT にプリインストールされたアプリケーション(spot-server)は、無線 LAN アクセスポイントとして振る舞い、Web ページ上に子機からのデータを表示します。
動作イメージ
使用方法 TWELITE SPOT スタートガイド まずは使ってみる をご覧ください。
ビューア画面 それぞれのビューアを選択すると、対応した TWELITE 子機 から受信したデータを表示します。
Signal Viewer TWELITE DIP (超簡単!標準アプリ) から受信したデータを表示します。
AI1-4 に入力した電圧や、DI1-4 の入力状態を確認できます。
Signal Viewer
CUE Viewer TWELITE CUE (キューアプリ、TWELITE CUE モード) から受信したデータを表示します。
加速度センサや磁気センサのデータを確認できます。
CUE Viewer
ARIA Viewer TWELITE ARIA (アリアアプリ、TWELITE ARIA モード) から受信したデータを表示します。
温湿度センサや磁気センサのデータを確認できます。
ARIA Viewer
閲覧環境によっては、グラフの X 軸ラベルが重なって見えることがあります。
Serial Viewer TWELITE SPOT が受信したパケットの電文を表示します。
Serial Viewer
親機・中継機アプリの ASCII 形式の出力を表示します。
工場出荷時のアプリの詳細 ESP32 ESP32 に書き込んでいるスケッチは、spot-server です。
GitHub
TWELITE TWELITE に書き込んでいるアプリは、App_Wings_SPOT_BLUE です。
親機・中継機アプリ (App_Wings)
3.2 - 無線性能に配慮した設置方法 無線性能に配慮した TWELITE SPOT の設置方法
TWELITE SPOT の無線性能に配慮した設置方法や、壁面への設置方法をご案内します。
TWELITE 専用アンテナに関する詳しい説明は
こちら を参照してください。
無線性能に配慮した設置 アンテナ方向マークを天地方向にする TWELITE SPOT で使用しているアンテナは、アンテナ方向マークを天地方向に向けると、TWELITE SPOT を上面から見たときに、TWELITE SPOT を中心に円状に電波が放射されるため、広い範囲の電波を受信することができます。
TWELITE SPOT と TWELITE 子機のアンテナ方向マークを同じ方向にする 電波には波の振動方向があり、この方向を偏波と呼びます。
送信側と受信側の偏波が同一でない場合感度が低くなり、通信距離が短くなります。
TWELITE SPOT に表記されているアンテナ方向マークはこの偏波の向きを示しており、通信するアンテナ同士のアンテナ方向マークを合わせることにより通信感度が良くなります。
周辺に障害物がない場所に設置する TWELITE SPOT の周辺に障害物があると電波が減衰するため、通信距離が短くなるため、この特性をご理解の上、設置場所を決めてください。
特に金属が TWELITE SPOT の周辺にあると著しく通信距離が短くなるため、TWELITE SPOT の周辺には金属を含む障害物を置かないようにしてください。
目安として TWELITE SPOT から半径 10cm 以内に金属を配置しないようにしてください。
壁面への設置 M3 ビスを 2 本使用しますが、金属製の部品は無線性能に影響を与える可能性があることに注意してください。
3.3 - ファームウェア開発環境の構築方法 TWELITE SPOT のファームウェア開発に向けた環境の構築方法
TWELITE SPOT のファームウェア開発を行うための環境構築の手順をご案内します。
3.3.1 - Arduino IDE 1.x による開発環境の構築方法 Arduino IDE 1.x を使用した開発環境の構築手順
Arduino IDE 1.x を使用した開発環境の構築手順をご案内します。
3.3.1.1 - Arduino IDE 1.x の導入 統合開発環境 (IDE) の導入手順
Arduino IDE 1.x の導入手順をご案内します。
すでに Arduino IDE 1.x がインストールされている場合は、本稿を無視してください。
ダウンロード Web ブラウザで Arduino 公式ダウンロードページ を開き、Legacy IDE (1.8.X) をダウンロードしてください 。
Software | Arduino
例えば、Windows のインストーラは “Windows Win 7 and newer” です。
インストール ダウンロードしたファイルを実行して指示に従い、Arduino IDE 1.x をインストールしてください。
3.3.1.2 - Arduino core for the ESP32 の導入 ESP32 向けツールチェインの導入手順
Arduino に対応した ESP32 専用のコンパイラやライブラリを導入する手順をご案内します。
インストール方法の詳細は
公式資料 をご覧ください(英語)。
ボード情報の追加 Arduino IDE 1.x を起動し、ツールバーの ファイル -> 環境設定 を開いてください。
環境設定の場所
追加のボードマネージャーのURL に下記の URL を入力し、OKボタンを押してください。
https://espressif.github.io/arduino-esp32/package_esp32_index.json 環境設定ウィンドウ
インストール ツールバーの ツール -> ボード: “Arduino Uno” -> ボードマネージャ を開いてください。
選択されているボードが “Arduino Uno” ではない場合もありますが、同様に操作してください。
ボードマネージャの場所
検索ボックスに “ESP32” と入力して、esp32 ボード定義をインストールしてください。
ボードマネージャ
バージョン 2.0.5 以降 3.3.0 以前で動作確認しています。
3.3.1.3 - Arduino core for the ESP32 の設定 ESP32 向けツールチェインの設定方法
TWELITE SPOT のファームウェア開発において必要となる Arduino core for the ESP32 の設定をご案内します。
ここからは TWELITE SPOT に固有の内容です。
ボード種別の選択 ツールバーの ツール ―> ボード -> ESP32 Arduino -> ESP32 Dev Module を選択してください。
ESP32 Dev Module の場所
ボード設定 以下の画像のように設定してください。
設定後の内容
デフォルトでは Flash size が 4MB (32Mb) となっています。
これを 16MB (128Mb) に変更してください。
3.3.1.4 - MWings ライブラリの導入 TWELITE を使用するためのライブラリ MWings のインストール手順
TWELITE を使用するためのライブラリ MWings の導入手順をご案内します。
インストール スケッチ -> ライブラリをインクルード -> ライブラリを管理… を開いてください。
ライブラリマネージャの場所
検索ボックスに MWings と入力し、MWings をインストールしてください。
ライブラリマネージャ
3.3.2 - Arduino IDE 2.x による開発環境の構築方法 Arduino IDE 2.x を使用した開発環境の構築手順
Arduino IDE 2.x を使用した開発環境の構築手順をご案内します。
3.3.2.1 - Arduino IDE 2.x の導入 統合開発環境 (IDE) の導入手順
Arduino IDE 2.x の導入手順をご案内します。
すでに Arduino IDE 2.x がインストールされている場合は、本稿を無視してください。
ダウンロード Web ブラウザで Arduino 公式ダウンロードページ を開き、Arduino IDE (2.X.X) をダウンロードしてください 。
Software | Arduino
インストール ダウンロードしたファイルを実行して指示に従い、Arduino IDE 2.x をインストールしてください。
3.3.2.2 - Arduino core for the ESP32 の導入 ESP32 向けツールチェインの導入手順
Arduino に対応した ESP32 専用のコンパイラやライブラリを導入する手順をご案内します。
インストール方法の詳細は
公式資料 をご覧ください(英語)。
ボード情報の追加 Arduino IDE 2.x を起動し、ツールバーから 環境設定 を開いてください。
追加のボードマネージャーのURL に下記の URL を入力し、OKボタンを押してください。
https://espressif.github.io/arduino-esp32/package_esp32_index.json 環境設定の画面
インストール サイドバーの上から数えて2番目にある ボードマネージャ を開いてください。
検索ボックスに “ESP32” と入力して、esp32 ボード定義をインストールしてください。
Arduino ESP32 Boards ではなく 、esp32 を選んでください。
ボードマネージャの画面
3.3.2.3 - Arduino core for the ESP32 の設定 ESP32 向けツールチェインの設定方法
TWELITE SPOT のファームウェア開発において必要となる Arduino core for the ESP32 の設定をご案内します。
ここからは TWELITE SPOT に固有の内容です。
ボード種別の選択 ツールバーの ツール -> ボード -> ESP32 Arduino -> ESP32 Dev Module を選択してください。
ESP32 Dev Module の場所
ボード設定 以下の画像のように設定してください。
設定後の内容
デフォルトでは Flash size が 4MB (32Mb) となっています。
これを 16MB (128Mb) に変更してください。
書き込み等に失敗する場合は、Flash Mode: QIO を Flash Mode: DIO に変えることをお試しください。
3.3.2.4 - MWings ライブラリの導入 TWELITE を使用するためのライブラリ MWings のインストール手順
TWELITE を使用するためのライブラリ MWings の導入手順をご案内します。
インストール スケッチ -> ライブラリをインクルード -> ライブラリを管理… を開いてください。
ライブラリマネージャの場所
検索ボックスに MWings と入力し、MWings をインストールしてください。
ライブラリマネージャ
3.4 - ファームウェアの書き込み方法 TWELITE SPOT に対するファームウェアの書き込み方法
TWELITE SPOT に搭載された ESP32 および TWELITE へのファームウェアの書き込み方法をご案内します。
3.4.1 - ESP32 へのファームウェアの書き込み方法 TWELITE SPOT に搭載された ESP32 に対するファームウェアの書き込み方法
TWELITE SPOT に搭載された ESP32 へのファームウェアの書き込み方法をご案内します。
3.4.1.1 - ESP32 へのスケッチの書き込み方法 TWELITE SPOT に搭載された ESP32 に対するスケッチの書き込み方法
TWELITE SPOT に搭載された ESP32 への Arduino スケッチの書き込み方法をご案内します。
ホストとの接続 TWELITE R3 / R2 を接続 7P インターフェイス(ESP32 と記載のある側)に TWELITE R3 / R2 を接続してください。
電源を接続 側面の USB-C コネクタ に 5V 電源を供給してください。
接続例 (ESP32)
TWELITE R3 / R2 は、必ず上図と同じ向きで TWELITE SPOT に接続してください。誤った向きで接続すると、 TWELITE SPOT や TWELITE R3 / R2 が破損する恐れがあります。
Arduino IDE の操作 スケッチを開く Arduino IDE を起動して、書き込むスケッチを開いてください。
シリアルポートを選択 ツール -> シリアルポート メニューから、 TWELITE R3 / R2 のポートを選択してください。
シリアルポート選択
シリアルポートは、Windows では COM? といった名称に、macOS / Linux では /dev/tty? といった名称になります。
ESP32 をプログラムモードで起動 TWELITE SPOT の ESP32 リセットスイッチ EN(RST) と ESP32 ブートスイッチ BOOT を押し、EN(RST) -> BOOT の順で離してください。
ボタンの位置
BOOT を押した状態でリセットすることで、ESP32 をプログラムモードに移行できます。
書き込みを実行 Arduino IDEの マイコンボードに書き込む ボタンをクリックしてください。
マイコンボードに書き込む
書き込みが完了すると、画面下部に Hard resetting via RTS pin... と表示されます。
書き込みに失敗し、下記のメッセージが表示された場合は、使用する USB ポートや USB ケーブルを変えてみてください。
A serial exception error occurred: Could not configure port: (6, 'Device not configured') ESP32 をリセット 書き込みが完了したら、TWELITE SPOT の ESP32 リセットスイッチ EN(RST) を押して離し、ESP32 をリセットしてください。
リセットスイッチの位置
書き込み完了画面
リセットを行わないと、プログラムモードから抜け出せません。
3.4.1.2 - ESP32 へのファイルの書き込み方法(Arduino IDE 1.x) TWELITE SPOT に搭載された ESP32 に対するファイルの書き込み方法
TWELITE SPOT に搭載された ESP32 へファイル(data/フォルダ以下のファイル群)を書き込む方法をご案内します。
本稿では、応用的な内容(TWELITE SPOT に搭載された ESP32 のフラッシュ領域をファイルシステムとして扱い、HTML などのファイルを書き込む方法)を紹介しております。
例えば TWELITE SPOT に HTML ファイルを書き込んでWebサーバとして振る舞わせたい(spot-server サンプルで実現しています)、TWELITE SPOT に暗号鍵ファイルを書き込んでおきたいといった要求がない場合には、本稿の内容を無視していただいて構いません。
本稿では、サードパーティのオープンソースソフトウェアを使用します。
サードパーティのソフトウェアについて、その詳しい使用方法を弊社からご案内することはいたしかねます。また、サードパーティのソフトウェアを使用されたことによるいかなる損害についても、弊社は一切の責任を負いません。
本稿で紹介する方法では、Arduino IDE 1.x を使用します。
プラグインの導入 ESP32 のフラッシュ領域へファイルを書き込むための Arduino プラグイン (arduino-esp32fs-plugin) をインストールします。
プラグインのダウンロード 以下のページから、esp32fs.zip を入手します。
Release Update to support Big Sur · lorol/arduino-esp32fs-plugin
プラグインのインストール ダウンロードした esp32fs.zip を展開してください。
Arduino のスケッチブックの保存場所(Arduino IDE 環境設定に記載。例:C:\Users\foo\Documents\Arduino)に tools フォルダがない場合は、これを作成してください。
tools フォルダに ESP32FS/tool フォルダを作成し、zipファイルから得た esp32ffs.jar ファイルを配置してください。(配置例:C:\Users\foo\Documents\Arduino\tools\ESP32FS\tool\esp32fs.jar)。
Arduino IDE を次に起動した際にプラグインが使用できるようになります。
ホストとの接続 TWELITE R3 / R2 を接続 7P インターフェイス(ESP32 と記載のある側)に TWELITE R3 / R2 を接続してください。
電源を接続 側面の USB-C コネクタ に 5V 電源を供給してください。
接続例 (ESP32)
TWELITE R3 / R2 は、必ず上図と同じ向きで TWELITE SPOT に接続してください。誤った向きで接続すると、 TWELITE SPOT や TWELITE R3 / R2 が破損する恐れがあります。
Arduino IDE の操作 スケッチを開く Arduino IDE を起動して、スケッチを開いてください。
書き込むファイルの配置 スケッチ -> スケッチのフォルダを表示 から、スケッチのフォルダを開いてください。
スケッチファイル(.ino)と同じ階層に、data フォルダを作成してください。
data フォルダ内に、書き込むファイルを配置してください。
フラッシュ領域においても、data フォルダ内の階層構造は維持されます。
シリアルポートを選択 ツール -> シリアルポート メニューから、 TWELITE R3 / R2 のポートを選択してください。
シリアルポート選択
シリアルポートは、Windows では COM? といった名称に、macOS / Linux では /dev/tty? といった名称になります。
ESP32 をプログラムモードで起動 TWELITE SPOT の ESP32 リセットスイッチ EN(RST) と ESP32 ブートスイッチ BOOT を押し、EN(RST) -> BOOT の順で離してください。
ボタンの位置
BOOT を押した状態でリセットすることで、ESP32 をプログラムモードに移行できます。
書き込みを実行 ツール -> ESP32 Sketch Data Upload をクリックしてください。
Select FS for <スケッチ名> /data folder にて、LittleFS を選択してください。
ファイルシステムの選択画面
OK を押してください。
書き込みが完了すると、画面下部に Hard resetting via RTS pin... と表示されます。
環境によっては、以下のように表示されて書き込みに失敗することがあります(macOS で確認)。
`Error: esptool not found!` その際には、esptool.py を Arduino15フォルダ/packages/esp32/tools/esptool_py/<バージョン>/esptool.py へ配置することで解決できるかもしれません。
例えば、macOS の場合には、下記のようにして esptool.py を取得し、シンボリックリンクを作成します。
/usr/bin/pip3 install esptool
ln -s ~/Library/Python/3.9/bin/esptool.py ~/Library/Arduino15/packages/esp32/tools/esptool_py/4.5.1/esptool.py 注:/usr/bin/pip3 と指定しないと、Homebrew のディレクトリにインストールされてしまうことがあります
ESP32 をリセット 書き込みが完了したら、TWELITE SPOT の ESP32 リセットスイッチ EN(RST) を押して離し、ESP32 をリセットしてください。
リセットスイッチの位置
3.4.1.3 - ESP32 へのファイルの書き込み方法(Arduino IDE 2.x) TWELITE SPOT に搭載された ESP32 に対するファイルの書き込み方法
TWELITE SPOT に搭載された ESP32 へファイル(data/フォルダ以下のファイル群)を書き込む方法をご案内します。
本稿では、応用的な内容(TWELITE SPOT に搭載された ESP32 のフラッシュ領域をファイルシステムとして扱い、HTML などのファイルを書き込む方法)を紹介しております。
例えば TWELITE SPOT に HTML ファイルを書き込んでWebサーバとして振る舞わせたい(spot-server サンプルで実現しています)、TWELITE SPOT に暗号鍵ファイルを書き込んでおきたいといった要求がない場合には、本稿の内容を無視していただいて構いません。
本稿では、サードパーティのオープンソースソフトウェアを使用します。
サードパーティのソフトウェアについて、その詳しい使用方法を弊社からご案内することはいたしかねます。また、サードパーティのソフトウェアを使用されたことによるいかなる損害についても、弊社は一切の責任を負いません。
本稿で紹介する方法では、Arduino IDE 2.x を使用します。
プラグインの導入 ESP32 のフラッシュ領域へファイルを書き込むための Arduino IDE 2.x プラグイン (earlephilhower/arduino-littlefs-upload) をインストールします。
プラグインのダウンロード 以下のページから、arduino-littlefs-upload-x.x.x.vsix を入手します。
Releases · earlephilhower/arduino-littlefs-upload
プラグインのインストール ダウンロードした arduino-littlefs-upload-x.x.x.vsix を、ユーザディレクトリ以下の .arduinoIDE/plugins に配置してください。
Windowsの例:C:\Users\foo\.arduinoIDE\plugins\ macOS/Linuxの例:~/.arduinoIDE/plugins/ ホストとの接続 TWELITE R3 / R2 を接続 7P インターフェイス(ESP32 と記載のある側)に TWELITE R3 / R2 を接続してください。
電源を接続 側面の USB-C コネクタ に 5V 電源を供給してください。
接続例 (ESP32)
TWELITE R3 / R2 は、必ず上図と同じ向きで TWELITE SPOT に接続してください。誤った向きで接続すると、 TWELITE SPOT や TWELITE R3 / R2 が破損する恐れがあります。
Arduino IDE の操作 スケッチを開く Arduino IDE を起動して、スケッチを開いてください。
書き込むファイルの配置 スケッチ -> スケッチのフォルダを表示 から、スケッチのフォルダを開いてください。
スケッチファイル(.ino)と同じ階層に、data フォルダを作成してください。
data フォルダ内に、書き込むファイルを配置してください。
フラッシュ領域においても、data フォルダ内の階層構造は維持されます。
シリアルポートを選択 ツール -> シリアルポート メニューから、 TWELITE R3 / R2 のポートを選択してください。
シリアルポートは、Windows では COM? といった名称に、macOS / Linux では /dev/tty? といった名称になります。
ESP32 をプログラムモードで起動 TWELITE SPOT の ESP32 リセットスイッチ EN(RST) と ESP32 ブートスイッチ BOOT を押し、EN(RST) -> BOOT の順で離してください。
ボタンの位置
BOOT を押した状態でリセットすることで、ESP32 をプログラムモードに移行できます。
書き込みを実行 Ctrl+Shift+P(macOSは⌘+Shift+P)を押して、コマンドパレットを呼び出してください。
Upload LittleFS to Pico/ESP8266/ESP32 を選択してください。
コマンドパレットの画面
書き込みが完了すると、画面下部に Completed upload. と表示されます。
ESP32 をリセット 書き込みが完了したら、TWELITE SPOT の ESP32 リセットスイッチ EN(RST) を押して離し、ESP32 をリセットしてください。
リセットスイッチの位置
3.4.1.4 - ESP32 のパーティションテーブルを指定した書き込み方法 TWELITE SPOT に搭載された ESP32 に対する書き込みにおいて、任意のパーティションテーブルを適用する方法
TWELITE SPOT に搭載された ESP32 へスケッチやファイルを書き込む際に、任意のパーティションテーブルを適用する方法をご案内します。
本稿では、応用的な内容(フラッシュ領域のパーティションテーブルを指定する方法)を紹介しております。
ESP32 Arduino Core に最初から含まれているパーティションテーブルの設定(例:Default 4MB with spiffs)を使用される場合は、本稿を無視していただいて構いません。
本稿の設定を行ったことによるいかなる損害についても、弊社は一切の責任を負いません。
定義ファイルの作成 パーティションテーブルの定義は、csv ファイルに記述します。
下記の例では、16MB のフラッシュ領域のうち、8MB をファイルシステムで使うように指定しています。
# TWELITE SPOT 16MB with 8MB LittleFS
# Name, Type, SubType, Offset, Size, Flags
nvs, data, nvs, 0x9000, 0x5000,
otadata, data, ota, 0xE000, 0x2000,
app0, app, ota_0, 0x10000, 0x7F0000,
spiffs, data, spiffs, 0x800000, 0x800000,
TWELITE SPOT 16MB with 8MB LittleFS Arduino IDE に表示される名前です。nvs システムで使用する領域です。変更しません。otadata OTA を使う際に使用する領域です。変更しません。app0 ファームウェアを書き込む領域です。spiffs LittleFS ファイルシステムで使用する領域です。csv ファイル中の Offset および Size 列の単位はバイトで、16進数です。
したがって、上記の例では、ファームウェアとファイルシステムが使えるサイズは下記のように計算できます。
app0 のサイズ:0x7F0000 = 8323072 より、7.875MBspiffs のサイズ:0x800000 = 8388608 より、8MB定義ファイルの登録 Arduino15フォルダ を開き、下記のパスに csv ファイルを追加します。
Arduino15/packages/esp32/hardware/esp32/x.x.x/tools/partitions x.x.x は Arduino core for the ESP32 のバージョン
パーティションテーブルの適用 Arduino IDE のツールバーから ツール -> Partition Scheme を開き、追加したパーティションテーブルを選びます。
選択したパーティションテーブルが次回以降のファームウェアの書き込みやファイルシステムの書き込みに反映されます。
スケッチファイルと同じ場所に partitions.csv という名前で設定ファイルを置くと、そちらが優先されます。ただし、Arduino IDE 上の表記は変わらないため、紛らわしい場合があります。
3.4.2 - TWELITE へのファームウェアの書き込み方法 TWELITE SPOT に搭載された TWELITE に対するファームウェアの書き込み方法
TWELITE SPOT に搭載された TWELITE へのファームウェアの書き込み方法をご案内します。
工場出荷時の TWELITE SPOT では、TWELITE に親機・中継機アプリ(App_Wings_SPOT)をあらかじめ書き込んでいます。工場出荷状態の場合は、TWELITE のファームウェアを書き換える必要はありません。
TWELITE SPOT に搭載される TWELITE では、インタラクティブモードによる設定変更ができません。
TWELITE の周波数チャネルやアプリケーションIDを設定するには、ESP32 からシリアル通信でコマンドを送信します。Arduino 環境では、Twelite.begin()
TWELITE STAGE APP をインストール TWELITE STAGE SDK をダウンロードし、ダウンロードしたファイルをCドライブ直下に展開してください。
ホストとの接続 TWELITE R3 / R2 を接続 7P インターフェイス(TWELITE と記載のある側)に TWELITE R3 / R2 を接続してください。
電源を接続 側面の USB-C コネクタ に 5V 電源を供給してください。
接続例 (TWELITE)
TWELITE R3 / R2 は、必ず上図と同じ向きで TWELITE SPOT に接続してください。誤った向きで接続すると、 TWELITE SPOT や TWELITE R3 / R2 が破損する恐れがあります。
TWELITE STAGE APP の操作 TWELITE STAGE APP (TWELITE_Stage.exe) を起動してください。
シリアルポート選択画面で TWELITE R3 / TWELITE R2 を選択してください。
メインメニュー -> アプリ書換 を選択し、書換えたいアプリを選択してください。
3.4.3 - ファームウェアの初期化方法 TWELITE SPOT のファームウェアを工場出荷時に戻す方法
TWELITE SPOT に搭載された ESP32 および TWELITE へ書き込まれたファームウェアを工場出荷時の状態に初期化する方法をご案内します。
3.4.3.1 - ESP32 のファームウェアの初期化方法 TWELITE SPOT に搭載された ESP32 に書き込まれたファームウェアを工場出荷時に戻す方法
esptool によって、TWELITE SPOT に搭載された ESP32 へ書き込まれたファームウェアを手動で工場出荷時の状態に戻す方法をご案内します。
esptool は、ESP32 にバイナリファイルを書き込むための公式ユーティリティです。
Python をインストール Python 3.7 以降がインストールされていない場合は、Python 3.7 以降をインストールしてください。
https://www.python.org/downloads/
PyPI から esptool をインストールしてください。
既存のPython環境に影響を与えたくない場合は、pipx の使用を推奨します。
ホストとの接続 TWELITE R3 / R2 を接続 7P インターフェイス(ESP32 と記載のある側)に TWELITE R3 / R2 を接続してください。
電源を接続 側面の USB-C コネクタ に 5V 電源を供給してください。
TWELITE R3 / R2 は、必ず上図と同じ向きで TWELITE SPOT に接続してください。誤った向きで接続すると、 TWELITE SPOT や TWELITE R3 / R2 が破損する恐れがあります。
バイナリファイルの取得 下記のリンクから、spot-server-2023-05-bin.zip をダウンロードしてください。
spot-server-2023-05-bin.zip
ダウンロードしたら、zipファイルを展開してください。
ESP32 をプログラムモードで起動 TWELITE SPOT の ESP32 リセットスイッチ EN(RST) と ESP32 ブートスイッチ BOOT を押し、EN(RST) -> BOOT の順で離してください。
ボタンの位置
BOOT を押した状態でリセットすることで、ESP32 をプログラムモードに移行できます。
esptool をインストールした端末でspot-server-2023-05-bin.zipを展開したフォルダに移動し、下記を実行してください。
esptool --chip esp32 --port <シリアルポート> --baud 921600 --before default_reset --after hard_reset write_flash -z --flash_mode qio --flash_freq 80m --flash_size 16MB 0x1000 spot-server.ino.bootloader.bin 0x8000 spot-server.ino.partitions.bin 0xe000 boot_app0.bin 0x10000 spot-server.ino.bin 0x100000 spot-server.littlefs.bin
<シリアルポート> には、COM? や /dev/tty? といったポート名を入力します。
もし失敗する場合は、下記をお試しください。
--flash_mode qio を --flash_mode dio に変更--flash_freq 80m を --flash_freq 40m に変更--baud 921600 を --baud 460800 に変更ESP32 をリセット 書き込みが完了したら、TWELITE SPOT の ESP32 リセットスイッチ EN(RST) を押して離し、ESP32 をリセットしてください。
リセットスイッチの位置
リセットを行わないと、プログラムモードから抜け出せません。
3.4.3.2 - TWELITE のファームウェアの初期化方法 TWELITE SPOT に搭載された TWELITE へ書き込まれたファームウェアを工場出荷時に戻す方法
TWELITE STAGE APP によって、TWELITE SPOT に搭載された TWELITE へ書き込まれたファームウェアを工場出荷時の状態に戻す方法をご案内します。
TWELITE SPOT に搭載される TWELITE では、インタラクティブモードによる設定変更ができません。
TWELITE の周波数チャネルやアプリケーションIDを設定するには、ESP32 からシリアル通信でコマンドを送信します。Arduino 環境では、Twelite.begin()
TWELITE STAGE APP をインストール TWELITE STAGE SDK をダウンロードし、ダウンロードしたファイルをCドライブ直下に展開(Windowsの場合)してください。
ファームウェアの入手 下記のリンクからバイナリファイルをダウンロードし、MWSTAGE フォルダ内の BIN フォルダに配置してください。
ホストとの接続 TWELITE R3 / R2 を接続 7P インターフェイス(TWELITE と記載のある側)に TWELITE R3 / R2 を接続してください。
電源を接続 側面の USB-C コネクタ に 5V 電源を供給してください。
TWELITE R3 / R2 は、必ず上図と同じ向きで TWELITE SPOT に接続してください。誤った向きで接続すると、 TWELITE SPOT や TWELITE R3 / R2 が破損する恐れがあります。
TWELITE STAGE APP の操作 TWELITE STAGE APP (TWELITE_Stage.exe) を起動してください。
シリアルポート選択画面で TWELITE R3 / TWELITE R2 を選択してください。
メインメニュー -> アプリ書換 -> BIN から選択 を選び、先ほど入手したバイナリ(App_Wings_TWELITESPOT_BLUE_L1305_V1-3-0.bin)を書き込んでください。
3.5 - サンプルスケッチの解説 TWELITE SPOT 向けサンプルスケッチの解説
TWELITE SPOT 向けサンプルスケッチの内容を解説します。
3.5.1 - TWELITE と通信するスケッチの解説 MWings ライブラリに同梱された TWELITE SPOT の基本的なサンプルスケッチの解説
TWELITE NET だけを使用し、無線 LAN を使わない簡単なサンプルスケッチを解説します。
3.5.1.1 - 超簡単!標準アプリのデータを取得・操作 超簡単!標準アプリのデータを取得・表示するサンプルスケッチ monitor_spot_app_twelite の解説
超簡単!標準アプリ (App_Twelite) のデータを取得・表示するサンプルスケッチ
monitor_spot_app_twelite の解説です。最後に、相手先の出力ポートを操作する改変を行います。
3.5.1.1.1 - 超簡単!標準アプリのデータを取得・操作 最新版
超簡単!標準アプリ (App_Twelite) のデータを取得・表示するサンプルスケッチ
monitor_spot_app_twelite の解説です。最後に、相手先の出力ポートを操作する改変を行います。
サンプルスケッチの保存場所 MWings ライブラリを導入 していれば、Arduino IDE の ファイル -> スケッチ例 -> MWings -> TWELITE SPOT -> Receive -> monitor_spot_app_twelite からスケッチを開くことができます。
保存場所の表示例
スケッチ 以下はソースコード本体です。
// Monitor example for TWELITE SPOT: Receive data from App_Twelite
#include <Arduino.h>
#include "MWings.h"
const int RST_PIN = 5 ;
const int PRG_PIN = 4 ;
const int LED_PIN = 18 ;
const int8_t RX1_PIN = 16 ;
const int8_t TX1_PIN = 17 ;
const uint8_t TWE_CHANNEL = 18 ;
const uint32_t TWE_APP_ID = 0x67720102 ;
void setup ()
{
// Initialize serial ports
115200 );
Serial.println("Monitor example for TWELITE SPOT: App_Twelite" );
Serial2.begin(115200 , SERIAL_8N1, RX1_PIN, TX1_PIN);
// Initialize TWELITE
LED_PIN, RST_PIN, PRG_PIN,
TWE_CHANNEL, TWE_APP_ID);
// Attach an event handler to process packets from App_Twelite
const ParsedAppTwelitePacket& packet) {
Serial.println("" );
Serial.print("Packet Timestamp: " );
Serial.print(packet.u16SequenceNumber / 64.0f , 1 ); Serial.println(" sec" );
Serial.print("Source Logical ID: 0x" );
Serial.println(packet.u8SourceLogicalId, HEX);
Serial.print("LQI: " );
Serial.println(packet.u8Lqi, DEC);
Serial.print("Supply Voltage: " );
Serial.print(packet.u16SupplyVoltage, DEC); Serial.println(" mV" );
Serial.print("Digital Input: " );
Serial.print(packet.bDiState[0 ] ? " DI1:Lo" : " DI1:Hi" );
Serial.print(packet.bDiState[1 ] ? " DI2:Lo" : " DI2:Hi" );
Serial.print(packet.bDiState[2 ] ? " DI3:Lo" : " DI3:Hi" );
Serial.println(packet.bDiState[3 ] ? " DI4:Lo" : " DI4:Hi" );
Serial.print("Analog Input: " );
Serial.print(" AI1:" ); Serial.print(packet.u16AiVoltage[0 ]); Serial.print(" mV" );
Serial.print(" AI2:" ); Serial.print(packet.u16AiVoltage[1 ]); Serial.print(" mV" );
Serial.print(" AI3:" ); Serial.print(packet.u16AiVoltage[2 ]); Serial.print(" mV" );
Serial.print(" AI4:" ); Serial.print(packet.u16AiVoltage[3 ]); Serial.println(" mV" );
});
}
void loop ()
{
// Update TWELITE
} ライブラリのインクルード 4行目では、MWings ライブラリ をインクルードしています。
ピン番号の定義 6-11行目では、ピン番号を定義しています。
const int RST_PIN = 5 ;
const int PRG_PIN = 4 ;
const int LED_PIN = 18 ;
const int8_t RX1_PIN = 16 ;
const int8_t TX1_PIN = 17 ; 名称 内容 RST_PINTWELITE の RST ピンが接続されているピンの番号 PRG_PINTWELITE の PRG ピンが接続されているピンの番号 LED_PIN基板上の ESP32 用 LED が接続されているピンの番号 RX1_PINTWELITE の RX1 ピンが接続されているピンの番号 TX1_PINTWELITE の TX1 ピンが接続されているピンの番号
TWELITE 設定の定義 13-14行目では、TWELITE SPOT に搭載された TWELITE 親機に適用する設定を定義しています。
const uint8_t TWE_CHANNEL = 18 ;
const uint32_t TWE_APP_ID = 0x67720102 ; 名称 内容 TWE_CHANNELTWELITE の 周波数チャネル TWE_APP_IDTWELITE の アプリケーション ID
スケッチ中の値は、超簡単!標準アプリの初期値です。
シリアルポートの設定 19-21行目では、使用するシリアルポートを初期化するとともに、シリアルモニタへ起動メッセージを出力しています。
Serial.begin(115200 );
Serial.println("Monitor example for TWELITE SPOT: App_Twelite" );
Serial2.begin(115200 , SERIAL_8N1, RX1_PIN, TX1_PIN); Serial は、Arduino IDE の シリアルモニタとの通信に使います。シリアルモニタの設定に合わせて、ボーレートを 115200 bps としています。
一方、Serial2 は、TWELITE SPOT に搭載された TWELITE 親機との通信に使います。こちらも TWELITE 親機の初期設定に合わせて、ボーレートを 115200 bps としています。
TWELITE の設定 24-27行目では、Twelite.begin()
Twelite.begin(Serial2,
LED_PIN, RST_PIN, PRG_PIN,
TWE_CHANNEL, TWE_APP_ID); パケット受信時のイベントの登録 29-49行目では、Twelite.on()
ここでは、受信したパケットの内容をシリアルモニタに出力しています。
Twelite.on([](const ParsedAppTwelitePacket& packet) {
Serial.println("" );
Serial.print("Packet Timestamp: " );
Serial.print(packet.u16SequenceNumber / 64.0f , 1 ); Serial.println(" sec" );
Serial.print("Source Logical ID: 0x" );
Serial.println(packet.u8SourceLogicalId, HEX);
Serial.print("LQI: " );
Serial.println(packet.u8Lqi, DEC);
Serial.print("Supply Voltage: " );
Serial.print(packet.u16SupplyVoltage, DEC); Serial.println(" mV" );
Serial.print("Digital Input: " );
Serial.print(packet.bDiState[0 ] ? " DI1:Lo" : " DI1:Hi" );
Serial.print(packet.bDiState[1 ] ? " DI2:Lo" : " DI2:Hi" );
Serial.print(packet.bDiState[2 ] ? " DI3:Lo" : " DI3:Hi" );
Serial.println(packet.bDiState[3 ] ? " DI4:Lo" : " DI4:Hi" );
Serial.print("Analog Input: " );
Serial.print(" AI1:" ); Serial.print(packet.u16AiVoltage[0 ]); Serial.print(" mV" );
Serial.print(" AI2:" ); Serial.print(packet.u16AiVoltage[1 ]); Serial.print(" mV" );
Serial.print(" AI3:" ); Serial.print(packet.u16AiVoltage[2 ]); Serial.print(" mV" );
Serial.print(" AI4:" ); Serial.print(packet.u16AiVoltage[3 ]); Serial.println(" mV" );
}); 上記のイベントは、超簡単!標準アプリからのパケットを受信したときにだけ呼び出されます。
受信したパケットの内容は ParsedAppTwelitePacketpacket に格納されています。
メッセージの内容 メッセージ 内容 Packet Timestampパケットのタイムスタンプ Source Logical ID送信元 TWELITE の論理デバイスID LQI無線通信品質(0~255) Supply Voltage電源電圧 (mV) Digital Inputデジタル入力の状態 Analog Inputアナログ入力の状態
TWELITE のデータの更新 55行目では、Twelite.update()
相手先の出力ポートの操作 超簡単!標準アプリの入力ポートの状態を取得するだけでなく、超簡単!標準アプリの出力ポートを操作してみましょう。
ここでは、TWELITE SPOT が受信した際の LQI(無線通信品質)に基づき、相手端末が TWELITE SPOT に近づいた際に、相手端末のデジタル出力ポートを点灯させてみます。
スケッチの改変 改変内容 はじめに、16行目へ下記のコードを追加します。
AppTweliteCommand command; 上記のコードでは、送信するコマンドの内容を格納する AppTweliteCommand
次に、52-54行目へ下記のコードを追加します。
command.u8DestinationLogicalId = packet.u8SourceLogicalId; // LID
0 ] = (packet.u8Lqi >= 100 ) ? true : false; // DI1
上記のコードでは、AppTweliteCommandTwelite.send()
これでスケッチの改変は終了です。改変後のコードを示します。
// Monitor example for TWELITE SPOT: Receive data from and send data to App_Twelite
#include <Arduino.h>
#include "MWings.h"
const int RST_PIN = 5 ;
const int PRG_PIN = 4 ;
const int LED_PIN = 18 ;
const int8_t RX1_PIN = 16 ;
const int8_t TX1_PIN = 17 ;
const uint8_t TWE_CHANNEL = 18 ;
const uint32_t TWE_APP_ID = 0x67720102 ;
AppTweliteCommand command;
void setup ()
{
// Initialize serial ports
115200 );
Serial.println("Monitor example for TWELITE SPOT: App_Twelite" );
Serial2.begin(115200 , SERIAL_8N1, RX1_PIN, TX1_PIN);
// Initialize TWELITE
LED_PIN, RST_PIN, PRG_PIN,
TWE_CHANNEL, TWE_APP_ID);
// Attach an event handler to process packets from App_Twelite
const ParsedAppTwelitePacket& packet) {
Serial.println("" );
Serial.print("Packet Timestamp: " );
Serial.print(packet.u16SequenceNumber / 64.0f , 1 ); Serial.println(" sec" );
Serial.print("Source Logical ID: 0x" );
Serial.println(packet.u8SourceLogicalId, HEX);
Serial.print("LQI: " );
Serial.println(packet.u8Lqi, DEC);
Serial.print("Supply Voltage: " );
Serial.print(packet.u16SupplyVoltage, DEC); Serial.println(" mV" );
Serial.print("Digital Input: " );
Serial.print(packet.bDiState[0 ] ? " DI1:Lo" : " DI1:Hi" );
Serial.print(packet.bDiState[1 ] ? " DI2:Lo" : " DI2:Hi" );
Serial.print(packet.bDiState[2 ] ? " DI3:Lo" : " DI3:Hi" );
Serial.println(packet.bDiState[3 ] ? " DI4:Lo" : " DI4:Hi" );
Serial.print("Analog Input: " );
Serial.print(" AI1:" ); Serial.print(packet.u16AiVoltage[0 ]); Serial.print(" mV" );
Serial.print(" AI2:" ); Serial.print(packet.u16AiVoltage[1 ]); Serial.print(" mV" );
Serial.print(" AI3:" ); Serial.print(packet.u16AiVoltage[2 ]); Serial.print(" mV" );
Serial.print(" AI4:" ); Serial.print(packet.u16AiVoltage[3 ]); Serial.println(" mV" );
command.u8DestinationLogicalId = packet.u8SourceLogicalId; // LID
0 ] = (packet.u8Lqi >= 100 ) ? true : false; // DI1
});
}
void loop ()
{
// Update TWELITE
} 動作確認 子機の TWELITE DIP の DO1 ピンと VCC ピンの間に LED と電流制限抵抗を接続してください。
改変したスケッチを書き込むと、TWELITE DIP が TWELITE SPOT に近づいた際(=通信品質がよいとき)に LED が点灯します。
TWELITE SPOT から子機を操作することができました!
3.5.1.1.2 - 超簡単!標準アプリのデータを取得・操作 v1.0.1
超簡単!標準アプリ (App_Twelite) のデータを取得・表示するサンプルスケッチ
monitor_spot_app_twelite の解説です。最後に、相手先の出力ポートを操作する改変を行います。
サンプルスケッチの保存場所 MWings ライブラリを導入 していれば、Arduino IDE の ファイル -> スケッチ例 -> MWings -> monitor_spot_app_twelite からスケッチを開くことができます。
保存場所
スケッチ 以下はソースコード本体です。
// Monitor example for TWELITE SPOT: Receive data from App_Twelite
#include <Arduino.h>
#include "MWings.h"
const int RST_PIN = 5 ;
const int PRG_PIN = 4 ;
const int LED_PIN = 18 ;
const uint8_t TWE_CHANNEL = 18 ;
const uint32_t TWE_APP_ID = 0x67720102 ;
void setup ()
{
// Initialize serial ports
115200 );
Serial.println("Monitor example for TWELITE SPOT: App_Twelite" );
Serial2.begin(115200 , SERIAL_8N1);
// Initialize TWELITE
LED_PIN, RST_PIN, PRG_PIN,
TWE_CHANNEL, TWE_APP_ID);
// Attach an event handler to process packets from App_Twelite
const ParsedAppTwelitePacket& packet) {
Serial.println("" );
Serial.print("Packet Timestamp: " );
Serial.print(packet.u16SequenceNumber / 64.0f , 1 ); Serial.println(" sec" );
Serial.print("Source Logical ID: 0x" );
Serial.println(packet.u8SourceLogicalId, HEX);
Serial.print("LQI: " );
Serial.println(packet.u8Lqi, DEC);
Serial.print("Supply Voltage: " );
Serial.print(packet.u16SupplyVoltage, DEC); Serial.println(" mV" );
Serial.print("Digital Input: " );
Serial.print(packet.bDiState[0 ] ? " DI1:Lo" : " DI1:Hi" );
Serial.print(packet.bDiState[1 ] ? " DI2:Lo" : " DI2:Hi" );
Serial.print(packet.bDiState[2 ] ? " DI3:Lo" : " DI3:Hi" );
Serial.println(packet.bDiState[3 ] ? " DI4:Lo" : " DI4:Hi" );
Serial.print("Analog Input: " );
Serial.print(" AI1:" ); Serial.print(packet.u16AiVoltage[0 ]); Serial.print(" mV" );
Serial.print(" AI2:" ); Serial.print(packet.u16AiVoltage[1 ]); Serial.print(" mV" );
Serial.print(" AI3:" ); Serial.print(packet.u16AiVoltage[2 ]); Serial.print(" mV" );
Serial.print(" AI4:" ); Serial.print(packet.u16AiVoltage[3 ]); Serial.println(" mV" );
});
}
void loop ()
{
// Update TWELITE
} ライブラリのインクルード 4行目では、MWings ライブラリ をインクルードしています。
ピン番号の定義 6-8行目では、ピン番号を定義しています。
const int RST_PIN = 5 ;
const int PRG_PIN = 4 ;
const int LED_PIN = 18 ; 名称 内容 RST_PINTWELITE の RST ピンが接続されているピンの番号 PRG_PINTWELITE の PRG ピンが接続されているピンの番号 LED_PIN基板上の ESP32 用 LED が接続されているピンの番号
TWELITE 設定の定義 10-11行目では、TWELITE SPOT に搭載された TWELITE 親機に適用する設定を定義しています。
const uint8_t TWE_CHANNEL = 18 ;
const uint32_t TWE_APP_ID = 0x67720102 ; 名称 内容 TWE_CHANNELTWELITE の 周波数チャネル TWE_APP_IDTWELITE の アプリケーション ID
スケッチ中の値は、超簡単!標準アプリの初期値です。
シリアルポートの設定 16-18行目では、使用するシリアルポートを初期化するとともに、シリアルモニタへ起動メッセージを出力しています。
Serial.begin(115200 );
Serial.println("Monitor example for TWELITE SPOT: App_Twelite" );
Serial2.begin(115200 , SERIAL_8N1); Serial は、Arduino IDE の シリアルモニタとの通信に使います。シリアルモニタの設定に合わせて、ボーレートを 115200 bps としています。
一方、Serial2 は、TWELITE SPOT に搭載された TWELITE 親機との通信に使います。こちらも TWELITE 親機の初期設定に合わせて、ボーレートを 115200 bps としています。
TWELITE の設定 21-23行目では、Twelite.begin()
Twelite.begin(Serial2,
LED_PIN, RST_PIN, PRG_PIN,
TWE_CHANNEL, TWE_APP_ID); パケット受信時のイベントの登録 26-46行目では、Twelite.on()
ここでは、受信したパケットの内容をシリアルモニタに出力しています。
Twelite.on([](const ParsedAppTwelitePacket& packet) {
Serial.println("" );
Serial.print("Packet Timestamp: " );
Serial.print(packet.u16SequenceNumber / 64.0f , 1 ); Serial.println(" sec" );
Serial.print("Source Logical ID: 0x" );
Serial.println(packet.u8SourceLogicalId, HEX);
Serial.print("LQI: " );
Serial.println(packet.u8Lqi, DEC);
Serial.print("Supply Voltage: " );
Serial.print(packet.u16SupplyVoltage, DEC); Serial.println(" mV" );
Serial.print("Digital Input: " );
Serial.print(packet.bDiState[0 ] ? " DI1:Lo" : " DI1:Hi" );
Serial.print(packet.bDiState[1 ] ? " DI2:Lo" : " DI2:Hi" );
Serial.print(packet.bDiState[2 ] ? " DI3:Lo" : " DI3:Hi" );
Serial.println(packet.bDiState[3 ] ? " DI4:Lo" : " DI4:Hi" );
Serial.print("Analog Input: " );
Serial.print(" AI1:" ); Serial.print(packet.u16AiVoltage[0 ]); Serial.print(" mV" );
Serial.print(" AI2:" ); Serial.print(packet.u16AiVoltage[1 ]); Serial.print(" mV" );
Serial.print(" AI3:" ); Serial.print(packet.u16AiVoltage[2 ]); Serial.print(" mV" );
Serial.print(" AI4:" ); Serial.print(packet.u16AiVoltage[3 ]); Serial.println(" mV" );
}); 上記のイベントは、超簡単!標準アプリからのパケットを受信したときにだけ呼び出されます。
受信したパケットの内容は ParsedAppTwelitePacketpacket に格納されています。
メッセージの内容 メッセージ 内容 Packet Timestampパケットのタイムスタンプ Source Logical ID送信元 TWELITE の論理デバイスID LQI無線通信品質(0~255) Supply Voltage電源電圧 (mV) Digital Inputデジタル入力の状態 Analog Inputアナログ入力の状態
TWELITE のデータの更新 52行目では、Twelite.update()
相手先の出力ポートの操作 超簡単!標準アプリの入力ポートの状態を取得するだけでなく、超簡単!標準アプリの出力ポートを操作してみましょう。
ここでは、TWELITE SPOT が受信した際の LQI(無線通信品質)に基づき、相手端末が TWELITE SPOT に近づいた際に、相手端末のデジタル出力ポートを点灯させてみます。
スケッチの改変 改変内容 はじめに、13行目へ下記のコードを追加します。
AppTweliteCommand command; 上記のコードでは、送信するコマンドの内容を格納する AppTweliteCommand
次に、49-51行目へ下記のコードを追加します。
command.u8DestinationLogicalId = packet.u8SourceLogicalId; // LID
0 ] = (packet.u8Lqi >= 100 ) ? true : false; // DI1
上記のコードでは、AppTweliteCommandTwelite.send()
これでスケッチの改変は終了です。改変後のコードを示します。
// Monitor example for TWELITE SPOT: Receive data from and send data to App_Twelite
#include <Arduino.h>
#include "MWings.h"
const int RST_PIN = 5 ;
const int PRG_PIN = 4 ;
const int LED_PIN = 18 ;
const uint8_t TWE_CHANNEL = 18 ;
const uint32_t TWE_APP_ID = 0x67720102 ;
AppTweliteCommand command;
void setup ()
{
// Initialize serial ports
115200 );
Serial.println("Monitor example for TWELITE SPOT: App_Twelite" );
Serial2.begin(115200 , SERIAL_8N1);
// Initialize TWELITE
LED_PIN, RST_PIN, PRG_PIN,
TWE_CHANNEL, TWE_APP_ID);
// Attach an event handler to process packets from App_Twelite
const ParsedAppTwelitePacket& packet) {
Serial.println("" );
Serial.print("Packet Timestamp: " );
Serial.print(packet.u16SequenceNumber / 64.0f , 1 ); Serial.println(" sec" );
Serial.print("Source Logical ID: 0x" );
Serial.println(packet.u8SourceLogicalId, HEX);
Serial.print("LQI: " );
Serial.println(packet.u8Lqi, DEC);
Serial.print("Supply Voltage: " );
Serial.print(packet.u16SupplyVoltage, DEC); Serial.println(" mV" );
Serial.print("Digital Input: " );
Serial.print(packet.bDiState[0 ] ? " DI1:Lo" : " DI1:Hi" );
Serial.print(packet.bDiState[1 ] ? " DI2:Lo" : " DI2:Hi" );
Serial.print(packet.bDiState[2 ] ? " DI3:Lo" : " DI3:Hi" );
Serial.println(packet.bDiState[3 ] ? " DI4:Lo" : " DI4:Hi" );
Serial.print("Analog Input: " );
Serial.print(" AI1:" ); Serial.print(packet.u16AiVoltage[0 ]); Serial.print(" mV" );
Serial.print(" AI2:" ); Serial.print(packet.u16AiVoltage[1 ]); Serial.print(" mV" );
Serial.print(" AI3:" ); Serial.print(packet.u16AiVoltage[2 ]); Serial.print(" mV" );
Serial.print(" AI4:" ); Serial.print(packet.u16AiVoltage[3 ]); Serial.println(" mV" );
command.u8DestinationLogicalId = packet.u8SourceLogicalId; // LID
0 ] = (packet.u8Lqi >= 100 ) ? true : false; // DI1
});
}
void loop ()
{
// Update TWELITE
} 動作確認 子機の TWELITE DIP の DO1 ピンと VCC ピンの間に LED と電流制限抵抗を接続してください。
改変したスケッチを書き込むと、TWELITE DIP が TWELITE SPOT に近づいた際(=通信品質がよいとき)に LED が点灯します。
TWELITE SPOT から子機を操作することができました!
3.5.1.1.3 - 超簡単!標準アプリのデータを取得・操作 v1.3.1
超簡単!標準アプリ (App_Twelite) のデータを取得・表示するサンプルスケッチ
monitor_spot_app_twelite の解説です。最後に、相手先の出力ポートを操作する改変を行います。
サンプルスケッチの保存場所 MWings ライブラリを導入 していれば、Arduino IDE の ファイル -> スケッチ例 -> MWings -> TWELITE SPOT -> Receive -> monitor_spot_app_twelite からスケッチを開くことができます。
保存場所の表示例
スケッチ 以下はソースコード本体です。
// Monitor example for TWELITE SPOT: Receive data from App_Twelite
#include <Arduino.h>
#include "MWings.h"
const int RST_PIN = 5 ;
const int PRG_PIN = 4 ;
const int LED_PIN = 18 ;
const uint8_t TWE_CHANNEL = 18 ;
const uint32_t TWE_APP_ID = 0x67720102 ;
void setup ()
{
// Initialize serial ports
115200 );
Serial.println("Monitor example for TWELITE SPOT: App_Twelite" );
Serial2.begin(115200 , SERIAL_8N1);
// Initialize TWELITE
LED_PIN, RST_PIN, PRG_PIN,
TWE_CHANNEL, TWE_APP_ID);
// Attach an event handler to process packets from App_Twelite
const ParsedAppTwelitePacket& packet) {
Serial.println("" );
Serial.print("Packet Timestamp: " );
Serial.print(packet.u16SequenceNumber / 64.0f , 1 ); Serial.println(" sec" );
Serial.print("Source Logical ID: 0x" );
Serial.println(packet.u8SourceLogicalId, HEX);
Serial.print("LQI: " );
Serial.println(packet.u8Lqi, DEC);
Serial.print("Supply Voltage: " );
Serial.print(packet.u16SupplyVoltage, DEC); Serial.println(" mV" );
Serial.print("Digital Input: " );
Serial.print(packet.bDiState[0 ] ? " DI1:Lo" : " DI1:Hi" );
Serial.print(packet.bDiState[1 ] ? " DI2:Lo" : " DI2:Hi" );
Serial.print(packet.bDiState[2 ] ? " DI3:Lo" : " DI3:Hi" );
Serial.println(packet.bDiState[3 ] ? " DI4:Lo" : " DI4:Hi" );
Serial.print("Analog Input: " );
Serial.print(" AI1:" ); Serial.print(packet.u16AiVoltage[0 ]); Serial.print(" mV" );
Serial.print(" AI2:" ); Serial.print(packet.u16AiVoltage[1 ]); Serial.print(" mV" );
Serial.print(" AI3:" ); Serial.print(packet.u16AiVoltage[2 ]); Serial.print(" mV" );
Serial.print(" AI4:" ); Serial.print(packet.u16AiVoltage[3 ]); Serial.println(" mV" );
});
}
void loop ()
{
// Update TWELITE
} ライブラリのインクルード 4行目では、MWings ライブラリ をインクルードしています。
ピン番号の定義 6-8行目では、ピン番号を定義しています。
const int RST_PIN = 5 ;
const int PRG_PIN = 4 ;
const int LED_PIN = 18 ; 名称 内容 RST_PINTWELITE の RST ピンが接続されているピンの番号 PRG_PINTWELITE の PRG ピンが接続されているピンの番号 LED_PIN基板上の ESP32 用 LED が接続されているピンの番号
TWELITE 設定の定義 10-11行目では、TWELITE SPOT に搭載された TWELITE 親機に適用する設定を定義しています。
const uint8_t TWE_CHANNEL = 18 ;
const uint32_t TWE_APP_ID = 0x67720102 ; 名称 内容 TWE_CHANNELTWELITE の 周波数チャネル TWE_APP_IDTWELITE の アプリケーション ID
スケッチ中の値は、超簡単!標準アプリの初期値です。
シリアルポートの設定 16-18行目では、使用するシリアルポートを初期化するとともに、シリアルモニタへ起動メッセージを出力しています。
Serial.begin(115200 );
Serial.println("Monitor example for TWELITE SPOT: App_Twelite" );
Serial2.begin(115200 , SERIAL_8N1); Serial は、Arduino IDE の シリアルモニタとの通信に使います。シリアルモニタの設定に合わせて、ボーレートを 115200 bps としています。
一方、Serial2 は、TWELITE SPOT に搭載された TWELITE 親機との通信に使います。こちらも TWELITE 親機の初期設定に合わせて、ボーレートを 115200 bps としています。
TWELITE の設定 21-23行目では、Twelite.begin()
Twelite.begin(Serial2,
LED_PIN, RST_PIN, PRG_PIN,
TWE_CHANNEL, TWE_APP_ID); パケット受信時のイベントの登録 26-46行目では、Twelite.on()
ここでは、受信したパケットの内容をシリアルモニタに出力しています。
Twelite.on([](const ParsedAppTwelitePacket& packet) {
Serial.println("" );
Serial.print("Packet Timestamp: " );
Serial.print(packet.u16SequenceNumber / 64.0f , 1 ); Serial.println(" sec" );
Serial.print("Source Logical ID: 0x" );
Serial.println(packet.u8SourceLogicalId, HEX);
Serial.print("LQI: " );
Serial.println(packet.u8Lqi, DEC);
Serial.print("Supply Voltage: " );
Serial.print(packet.u16SupplyVoltage, DEC); Serial.println(" mV" );
Serial.print("Digital Input: " );
Serial.print(packet.bDiState[0 ] ? " DI1:Lo" : " DI1:Hi" );
Serial.print(packet.bDiState[1 ] ? " DI2:Lo" : " DI2:Hi" );
Serial.print(packet.bDiState[2 ] ? " DI3:Lo" : " DI3:Hi" );
Serial.println(packet.bDiState[3 ] ? " DI4:Lo" : " DI4:Hi" );
Serial.print("Analog Input: " );
Serial.print(" AI1:" ); Serial.print(packet.u16AiVoltage[0 ]); Serial.print(" mV" );
Serial.print(" AI2:" ); Serial.print(packet.u16AiVoltage[1 ]); Serial.print(" mV" );
Serial.print(" AI3:" ); Serial.print(packet.u16AiVoltage[2 ]); Serial.print(" mV" );
Serial.print(" AI4:" ); Serial.print(packet.u16AiVoltage[3 ]); Serial.println(" mV" );
}); 上記のイベントは、超簡単!標準アプリからのパケットを受信したときにだけ呼び出されます。
受信したパケットの内容は ParsedAppTwelitePacketpacket に格納されています。
メッセージの内容 メッセージ 内容 Packet Timestampパケットのタイムスタンプ Source Logical ID送信元 TWELITE の論理デバイスID LQI無線通信品質(0~255) Supply Voltage電源電圧 (mV) Digital Inputデジタル入力の状態 Analog Inputアナログ入力の状態
TWELITE のデータの更新 52行目では、Twelite.update()
相手先の出力ポートの操作 超簡単!標準アプリの入力ポートの状態を取得するだけでなく、超簡単!標準アプリの出力ポートを操作してみましょう。
ここでは、TWELITE SPOT が受信した際の LQI(無線通信品質)に基づき、相手端末が TWELITE SPOT に近づいた際に、相手端末のデジタル出力ポートを点灯させてみます。
スケッチの改変 改変内容 はじめに、13行目へ下記のコードを追加します。
AppTweliteCommand command; 上記のコードでは、送信するコマンドの内容を格納する AppTweliteCommand
次に、49-51行目へ下記のコードを追加します。
command.u8DestinationLogicalId = packet.u8SourceLogicalId; // LID
0 ] = (packet.u8Lqi >= 100 ) ? true : false; // DI1
上記のコードでは、AppTweliteCommandTwelite.send()
これでスケッチの改変は終了です。改変後のコードを示します。
// Monitor example for TWELITE SPOT: Receive data from and send data to App_Twelite
#include <Arduino.h>
#include "MWings.h"
const int RST_PIN = 5 ;
const int PRG_PIN = 4 ;
const int LED_PIN = 18 ;
const uint8_t TWE_CHANNEL = 18 ;
const uint32_t TWE_APP_ID = 0x67720102 ;
AppTweliteCommand command;
void setup ()
{
// Initialize serial ports
115200 );
Serial.println("Monitor example for TWELITE SPOT: App_Twelite" );
Serial2.begin(115200 , SERIAL_8N1);
// Initialize TWELITE
LED_PIN, RST_PIN, PRG_PIN,
TWE_CHANNEL, TWE_APP_ID);
// Attach an event handler to process packets from App_Twelite
const ParsedAppTwelitePacket& packet) {
Serial.println("" );
Serial.print("Packet Timestamp: " );
Serial.print(packet.u16SequenceNumber / 64.0f , 1 ); Serial.println(" sec" );
Serial.print("Source Logical ID: 0x" );
Serial.println(packet.u8SourceLogicalId, HEX);
Serial.print("LQI: " );
Serial.println(packet.u8Lqi, DEC);
Serial.print("Supply Voltage: " );
Serial.print(packet.u16SupplyVoltage, DEC); Serial.println(" mV" );
Serial.print("Digital Input: " );
Serial.print(packet.bDiState[0 ] ? " DI1:Lo" : " DI1:Hi" );
Serial.print(packet.bDiState[1 ] ? " DI2:Lo" : " DI2:Hi" );
Serial.print(packet.bDiState[2 ] ? " DI3:Lo" : " DI3:Hi" );
Serial.println(packet.bDiState[3 ] ? " DI4:Lo" : " DI4:Hi" );
Serial.print("Analog Input: " );
Serial.print(" AI1:" ); Serial.print(packet.u16AiVoltage[0 ]); Serial.print(" mV" );
Serial.print(" AI2:" ); Serial.print(packet.u16AiVoltage[1 ]); Serial.print(" mV" );
Serial.print(" AI3:" ); Serial.print(packet.u16AiVoltage[2 ]); Serial.print(" mV" );
Serial.print(" AI4:" ); Serial.print(packet.u16AiVoltage[3 ]); Serial.println(" mV" );
command.u8DestinationLogicalId = packet.u8SourceLogicalId; // LID
0 ] = (packet.u8Lqi >= 100 ) ? true : false; // DI1
});
}
void loop ()
{
// Update TWELITE
} 動作確認 子機の TWELITE DIP の DO1 ピンと VCC ピンの間に LED と電流制限抵抗を接続してください。
改変したスケッチを書き込むと、TWELITE DIP が TWELITE SPOT に近づいた際(=通信品質がよいとき)に LED が点灯します。
TWELITE SPOT から子機を操作することができました!
3.5.1.2 - キューアプリのデータを取得 キューアプリのデータを取得・表示するサンプルスケッチ monitor_spot_app_cue の解説
キューアプリ (App_CUE) のデータを取得・表示するサンプルスケッチ
monitor_spot_app_cue の解説です。
3.5.1.2.1 - キューアプリのデータを取得 最新版
キューアプリ (App_CUE) のデータを取得・表示するサンプルスケッチ
monitor_spot_app_cue の解説です。
サンプルスケッチの保存場所 MWings ライブラリを導入 していれば、Arduino IDE の ファイル -> スケッチ例 -> MWings -> TWELITE SPOT -> Receive -> monitor_spot_app_cue からスケッチを開くことができます。
保存場所の表示例
スケッチ 以下はソースコード本体です。
// Monitor example for TWELITE SPOT: Receive data from App_CUE (CUE Mode)
#include <Arduino.h>
#include "MWings.h"
const int RST_PIN = 5 ;
const int PRG_PIN = 4 ;
const int LED_PIN = 18 ;
const int8_t RX1_PIN = 16 ;
const int8_t TX1_PIN = 17 ;
const uint8_t TWE_CHANNEL = 18 ;
const uint32_t TWE_APP_ID = 0x67720102 ;
void printAccelEvent (const uint8_t event);
void printMagnetState (const uint8_t state, const bool changed);
void setup ()
{
// Initialize serial ports
115200 );
Serial.println("Monitor example for TWELITE SPOT: App_CUE (CUE Mode)" );
Serial2.begin(115200 , SERIAL_8N1, RX1_PIN, TX1_PIN);
// Initialize TWELITE
LED_PIN, RST_PIN, PRG_PIN,
TWE_CHANNEL, TWE_APP_ID);
// Attach an event handler to process packets from App_CUE
const ParsedAppCuePacket& packet) {
Serial.println("" );
Serial.print("Packet Number: #" );
Serial.println(packet.u16SequenceNumber, DEC);
Serial.print("Source Logical ID: 0x" );
Serial.println(packet.u8SourceLogicalId, HEX);
Serial.print("LQI: " );
Serial.println(packet.u8Lqi, DEC);
Serial.print("Supply Voltage: " );
Serial.print(packet.u16SupplyVoltage, DEC); Serial.println(" mV" );
Serial.print("Accel Event: " );
printAccelEvent(packet.u8AccelEvent);
Serial.print("Accel X Axis [0]: " );
Serial.print(packet.i16SamplesX[0 ], DEC); Serial.println(" mG" );
Serial.print("Accel Y Axis [0]: " );
Serial.print(packet.i16SamplesY[0 ], DEC); Serial.println(" mG" );
Serial.print("Accel Z Axis [0]: " );
Serial.print(packet.i16SamplesZ[0 ], DEC); Serial.println(" mG" );
Serial.print("Magnet State: " );
printMagnetState(packet.u8MagnetState, packet.bMagnetStateChanged);
});
}
void loop ()
{
// Update TWELITE
}
void printAccelEvent (const uint8_t event)
{
switch (event) {
case 0x01 : { Serial.print("Dice (1)" ); break ; }
case 0x02 : { Serial.print("Dice (2)" ); break ; }
case 0x03 : { Serial.print("Dice (3)" ); break ; }
case 0x04 : { Serial.print("Dice (4)" ); break ; }
case 0x05 : { Serial.print("Dice (5)" ); break ; }
case 0x06 : { Serial.print("Dice (6)" ); break ; }
case 0x08 : { Serial.print("Shake" ); break ; }
case 0x10 : { Serial.print("Move" ); break ; }
default : break ;
}
Serial.println("" );
}
void printMagnetState (const uint8_t state, const bool changed)
{
if (changed) {
switch (state) {
case 0x0 : { Serial.print("Leaving or Not found" ); break ; }
case 0x1 : { Serial.print("N-pole is getting closer" ); break ; }
case 0x2 : { Serial.print("S-pole is getting closer" ); break ; }
default : break ;
}
} else {
switch (state) {
case 0x0 : { Serial.print("Not found" ); break ; }
case 0x1 : { Serial.print("N-pole is close" ); break ; }
case 0x2 : { Serial.print("S-pole is close" ); break ; }
default : break ;
}
Serial.print(" (Periodic packet)" );
}
Serial.println("" );
} ライブラリのインクルード 4行目では、MWings ライブラリ をインクルードしています。
ピン番号の定義 6-11行目では、ピン番号を定義しています。
const int RST_PIN = 5 ;
const int PRG_PIN = 4 ;
const int LED_PIN = 18 ;
const int8_t RX1_PIN = 16 ;
const int8_t TX1_PIN = 17 ; 名称 内容 RST_PINTWELITE の RST ピンが接続されているピンの番号 PRG_PINTWELITE の PRG ピンが接続されているピンの番号 LED_PIN基板上の ESP32 用 LED が接続されているピンの番号 RX1_PINTWELITE の RX1 ピンが接続されているピンの番号 TX1_PINTWELITE の TX1 ピンが接続されているピンの番号
TWELITE 設定の定義 13-14行目では、TWELITE SPOT に搭載された TWELITE 親機に適用する設定を定義しています。
const uint8_t TWE_CHANNEL = 18 ;
const uint32_t TWE_APP_ID = 0x67720102 ; 名称 内容 TWE_CHANNELTWELITE の 周波数チャネル TWE_APP_IDTWELITE の アプリケーション ID
シリアルポートの設定 22-24行目では、使用するシリアルポートを初期化するとともに、シリアルモニタへ起動メッセージを出力しています。
Serial.begin(115200 );
Serial.println("Monitor example for TWELITE SPOT: App_CUE (CUE Mode)" );
Serial2.begin(115200 ); Serial は、Arduino IDE の シリアルモニタとの通信に使います。シリアルモニタの設定に合わせて、ボーレートを 115200 bps としています。
一方、Serial2 は、TWELITE SPOT に搭載された TWELITE 親機との通信に使います。こちらも TWELITE 親機の初期設定に合わせて、ボーレートを 115200 bps としています。
TWELITE の設定 27-29行目では、Twelite.begin()
Twelite.begin(Serial2,
LED_PIN, RST_PIN, PRG_PIN,
TWE_CHANNEL, TWE_APP_ID); パケット受信時のイベントの登録 32-52行目では、Twelite.on()
ここでは、受信したパケットの内容をシリアルモニタに出力しています。
Twelite.on([](const ParsedAppCuePacket& packet) {
Serial.println("" );
Serial.print("Packet Number: #" );
Serial.println(packet.u16SequenceNumber, DEC);
Serial.print("Source Logical ID: 0x" );
Serial.println(packet.u8SourceLogicalId, HEX);
Serial.print("LQI: " );
Serial.println(packet.u8Lqi, DEC);
Serial.print("Supply Voltage: " );
Serial.print(packet.u16SupplyVoltage, DEC); Serial.println(" mV" );
Serial.print("Accel Event: " );
printAccelEvent(packet.u8AccelEvent);
Serial.print("Accel X Axis [0]: " );
Serial.print(packet.i16SamplesX[0 ], DEC); Serial.println(" mG" );
Serial.print("Accel Y Axis [0]: " );
Serial.print(packet.i16SamplesY[0 ], DEC); Serial.println(" mG" );
Serial.print("Accel Z Axis [0]: " );
Serial.print(packet.i16SamplesZ[0 ], DEC); Serial.println(" mG" );
Serial.print("Magnet State: " );
printMagnetState(packet.u8MagnetState, packet.bMagnetStateChanged);
}); 上記のイベントは、キューアプリ(TWELITE CUE モード)からのパケットを受信したときにだけ呼び出されます。
受信したパケットの内容は ParsedAppCuePacketpacket に格納されています。
メッセージの内容 メッセージ 内容 Packet Numberパケットの続き番号 Source Logical ID送信元 TWELITE の論理デバイスID LQI無線通信品質(0~255) Supply Voltage電源電圧 (mV) Accel Event加速度センサーの状態 Accel X AxisX 軸加速度(1サンプル目) Accel Y AxisY 軸加速度(1サンプル目) Accel Z AxisZ 軸加速度(1サンプル目) Magnet State磁気センサーの状態
加速度センサーの状態 出力される加速度センサーの状態は以下の通りです。
Dice (1) - Dice (6) サイコロの目(姿勢)を検知した。Shake 揺さぶるような動きを検知した。Move ゆっくりとした動きを検知した。磁気センサーの状態 出力される磁気センサーの状態は以下の通りです。
S-pole is getting closer 新たに磁石のS極を検知した。N-pole is getting closer 新たに磁石のN極を検知した。Leaving or Not found 磁石が検知できなかった。S-pole is close (Periodic packet) 磁石のS極を検知している。N-pole is close (Periodic packet) 磁石のN極を検知している。Not found (Periodic packet) 磁石を連続で検知できていない(定期送信パケット)。TWELITE のデータの更新 58行目では、Twelite.update()
3.5.1.2.2 - キューアプリのデータを取得 v1.0.1
キューアプリ (App_CUE) のデータを取得・表示するサンプルスケッチ
monitor_spot_app_cue の解説です。
サンプルスケッチの保存場所 MWings ライブラリを導入 していれば、Arduino IDE の ファイル -> スケッチ例 -> MWings -> monitor_spot_app_cue からスケッチを開くことができます。
保存場所
スケッチ 以下はソースコード本体です。
// Monitor example for TWELITE SPOT: Receive data from App_CUE (CUE Mode)
#include <Arduino.h>
#include "MWings.h"
const int RST_PIN = 5 ;
const int PRG_PIN = 4 ;
const int LED_PIN = 18 ;
const uint8_t TWE_CHANNEL = 18 ;
const uint32_t TWE_APP_ID = 0x67720102 ;
void printAccelEvent (const uint8_t event);
void printMagnetState (const uint8_t state, const bool changed);
void setup ()
{
// Initialize serial ports
115200 );
Serial.println("Monitor example for TWELITE SPOT: App_CUE (CUE Mode)" );
Serial2.begin(115200 );
// Initialize TWELITE
LED_PIN, RST_PIN, PRG_PIN,
TWE_CHANNEL, TWE_APP_ID);
// Attach an event handler to process packets from App_CUE
const ParsedAppCuePacket& packet) {
Serial.println("" );
Serial.print("Packet Number: #" );
Serial.println(packet.u16SequenceNumber, DEC);
Serial.print("Source Logical ID: 0x" );
Serial.println(packet.u8SourceLogicalId, HEX);
Serial.print("LQI: " );
Serial.println(packet.u8Lqi, DEC);
Serial.print("Supply Voltage: " );
Serial.print(packet.u16SupplyVoltage, DEC); Serial.println(" mV" );
Serial.print("Accel Event: " );
printAccelEvent(packet.u8AccelEvent);
Serial.print("Accel X Axis [0]: " );
Serial.print(packet.i16SamplesX[0 ], DEC); Serial.println(" mG" );
Serial.print("Accel Y Axis [0]: " );
Serial.print(packet.i16SamplesY[0 ], DEC); Serial.println(" mG" );
Serial.print("Accel Z Axis [0]: " );
Serial.print(packet.i16SamplesZ[0 ], DEC); Serial.println(" mG" );
Serial.print("Magnet State: " );
printMagnetState(packet.u8MagnetState, packet.bMagnetStateChanged);
});
}
void loop ()
{
// Update TWELITE
}
void printAccelEvent (const uint8_t event)
{
switch (event) {
case 0x01 : { Serial.print("Dice (1)" ); break ; }
case 0x02 : { Serial.print("Dice (2)" ); break ; }
case 0x03 : { Serial.print("Dice (3)" ); break ; }
case 0x04 : { Serial.print("Dice (4)" ); break ; }
case 0x05 : { Serial.print("Dice (5)" ); break ; }
case 0x06 : { Serial.print("Dice (6)" ); break ; }
case 0x08 : { Serial.print("Shake" ); break ; }
case 0x10 : { Serial.print("Move" ); break ; }
default : break ;
}
Serial.println("" );
}
void printMagnetState (const uint8_t state, const bool changed)
{
if (changed) {
switch (state) {
case 0x0 : { Serial.print("Leaving or Not found" ); break ; }
case 0x1 : { Serial.print("N-pole is getting closer" ); break ; }
case 0x2 : { Serial.print("S-pole is getting closer" ); break ; }
default : break ;
}
} else {
switch (state) {
case 0x0 : { Serial.print("Not found" ); break ; }
case 0x1 : { Serial.print("N-pole is close" ); break ; }
case 0x2 : { Serial.print("S-pole is close" ); break ; }
default : break ;
}
Serial.print(" (Periodic packet)" );
}
Serial.println("" );
} ライブラリのインクルード 4行目では、MWings ライブラリ をインクルードしています。
ピン番号の定義 6-8行目では、ピン番号を定義しています。
const int RST_PIN = 5 ;
const int PRG_PIN = 4 ;
const int LED_PIN = 18 ; 名称 内容 RST_PINTWELITE の RST ピンが接続されているピンの番号 PRG_PINTWELITE の PRG ピンが接続されているピンの番号 LED_PIN基板上の ESP32 用 LED が接続されているピンの番号
TWELITE 設定の定義 10-11行目では、TWELITE SPOT に搭載された TWELITE 親機に適用する設定を定義しています。
const uint8_t TWE_CHANNEL = 18 ;
const uint32_t TWE_APP_ID = 0x67720102 ; 名称 内容 TWE_CHANNELTWELITE の 周波数チャネル TWE_APP_IDTWELITE の アプリケーション ID
シリアルポートの設定 19-21行目では、使用するシリアルポートを初期化するとともに、シリアルモニタへ起動メッセージを出力しています。
Serial.begin(115200 );
Serial.println("Monitor example for TWELITE SPOT: App_CUE (CUE Mode)" );
Serial2.begin(115200 ); Serial は、Arduino IDE の シリアルモニタとの通信に使います。シリアルモニタの設定に合わせて、ボーレートを 115200 bps としています。
一方、Serial2 は、TWELITE SPOT に搭載された TWELITE 親機との通信に使います。こちらも TWELITE 親機の初期設定に合わせて、ボーレートを 115200 bps としています。
TWELITE の設定 24-26行目では、Twelite.begin()
Twelite.begin(Serial2,
LED_PIN, RST_PIN, PRG_PIN,
TWE_CHANNEL, TWE_APP_ID); パケット受信時のイベントの登録 29-49行目では、Twelite.on()
ここでは、受信したパケットの内容をシリアルモニタに出力しています。
Twelite.on([](const ParsedAppCuePacket& packet) {
Serial.println("" );
Serial.print("Packet Number: #" );
Serial.println(packet.u16SequenceNumber, DEC);
Serial.print("Source Logical ID: 0x" );
Serial.println(packet.u8SourceLogicalId, HEX);
Serial.print("LQI: " );
Serial.println(packet.u8Lqi, DEC);
Serial.print("Supply Voltage: " );
Serial.print(packet.u16SupplyVoltage, DEC); Serial.println(" mV" );
Serial.print("Accel Event: " );
printAccelEvent(packet.u8AccelEvent);
Serial.print("Accel X Axis [0]: " );
Serial.print(packet.i16SamplesX[0 ], DEC); Serial.println(" mG" );
Serial.print("Accel Y Axis [0]: " );
Serial.print(packet.i16SamplesY[0 ], DEC); Serial.println(" mG" );
Serial.print("Accel Z Axis [0]: " );
Serial.print(packet.i16SamplesZ[0 ], DEC); Serial.println(" mG" );
Serial.print("Magnet State: " );
printMagnetState(packet.u8MagnetState, packet.bMagnetStateChanged);
}); 上記のイベントは、キューアプリ(TWELITE CUE モード)からのパケットを受信したときにだけ呼び出されます。
受信したパケットの内容は ParsedAppCuePacketpacket に格納されています。
メッセージの内容 メッセージ 内容 Packet Numberパケットの続き番号 Source Logical ID送信元 TWELITE の論理デバイスID LQI無線通信品質(0~255) Supply Voltage電源電圧 (mV) Accel Event加速度センサーの状態 Accel X AxisX 軸加速度(1サンプル目) Accel Y AxisY 軸加速度(1サンプル目) Accel Z AxisZ 軸加速度(1サンプル目) Magnet State磁気センサーの状態
加速度センサーの状態 出力される加速度センサーの状態は以下の通りです。
Dice (1) - Dice (6) サイコロの目(姿勢)を検知した。Shake 揺さぶるような動きを検知した。Move ゆっくりとした動きを検知した。磁気センサーの状態 出力される磁気センサーの状態は以下の通りです。
S-pole is getting closer 新たに磁石のS極を検知した。N-pole is getting closer 新たに磁石のN極を検知した。Leaving or Not found 磁石が検知できなかった。S-pole is close (Periodic packet) 磁石のS極を検知している。N-pole is close (Periodic packet) 磁石のN極を検知している。Not found (Periodic packet) 磁石を連続で検知できていない(定期送信パケット)。TWELITE のデータの更新 55行目では、Twelite.update()
3.5.1.2.3 - キューアプリのデータを取得 v1.1.3
キューアプリ (App_CUE) のデータを取得・表示するサンプルスケッチ
monitor_spot_app_cue の解説です。
サンプルスケッチの保存場所 MWings ライブラリを導入 していれば、Arduino IDE の ファイル -> スケッチ例 -> MWings -> TWELITE SPOT -> Receive -> monitor_spot_app_cue からスケッチを開くことができます。
保存場所の表示例
スケッチ 以下はソースコード本体です。
// Monitor example for TWELITE SPOT: Receive data from App_CUE (CUE Mode)
#include <Arduino.h>
#include "MWings.h"
const int RST_PIN = 5 ;
const int PRG_PIN = 4 ;
const int LED_PIN = 18 ;
const uint8_t TWE_CHANNEL = 18 ;
const uint32_t TWE_APP_ID = 0x67720102 ;
void printAccelEvent (const uint8_t event);
void printMagnetState (const uint8_t state, const bool changed);
void setup ()
{
// Initialize serial ports
115200 );
Serial.println("Monitor example for TWELITE SPOT: App_CUE (CUE Mode)" );
Serial2.begin(115200 );
// Initialize TWELITE
LED_PIN, RST_PIN, PRG_PIN,
TWE_CHANNEL, TWE_APP_ID);
// Attach an event handler to process packets from App_CUE
const ParsedAppCuePacket& packet) {
Serial.println("" );
Serial.print("Packet Number: #" );
Serial.println(packet.u16SequenceNumber, DEC);
Serial.print("Source Logical ID: 0x" );
Serial.println(packet.u8SourceLogicalId, HEX);
Serial.print("LQI: " );
Serial.println(packet.u8Lqi, DEC);
Serial.print("Supply Voltage: " );
Serial.print(packet.u16SupplyVoltage, DEC); Serial.println(" mV" );
Serial.print("Accel Event: " );
printAccelEvent(packet.u8AccelEvent);
Serial.print("Accel X Axis [0]: " );
Serial.print(packet.i16SamplesX[0 ], DEC); Serial.println(" mG" );
Serial.print("Accel Y Axis [0]: " );
Serial.print(packet.i16SamplesY[0 ], DEC); Serial.println(" mG" );
Serial.print("Accel Z Axis [0]: " );
Serial.print(packet.i16SamplesZ[0 ], DEC); Serial.println(" mG" );
Serial.print("Magnet State: " );
printMagnetState(packet.u8MagnetState, packet.bMagnetStateChanged);
});
}
void loop ()
{
// Update TWELITE
}
void printAccelEvent (const uint8_t event)
{
switch (event) {
case 0x01 : { Serial.print("Dice (1)" ); break ; }
case 0x02 : { Serial.print("Dice (2)" ); break ; }
case 0x03 : { Serial.print("Dice (3)" ); break ; }
case 0x04 : { Serial.print("Dice (4)" ); break ; }
case 0x05 : { Serial.print("Dice (5)" ); break ; }
case 0x06 : { Serial.print("Dice (6)" ); break ; }
case 0x08 : { Serial.print("Shake" ); break ; }
case 0x10 : { Serial.print("Move" ); break ; }
default : break ;
}
Serial.println("" );
}
void printMagnetState (const uint8_t state, const bool changed)
{
if (changed) {
switch (state) {
case 0x0 : { Serial.print("Leaving or Not found" ); break ; }
case 0x1 : { Serial.print("N-pole is getting closer" ); break ; }
case 0x2 : { Serial.print("S-pole is getting closer" ); break ; }
default : break ;
}
} else {
switch (state) {
case 0x0 : { Serial.print("Not found" ); break ; }
case 0x1 : { Serial.print("N-pole is close" ); break ; }
case 0x2 : { Serial.print("S-pole is close" ); break ; }
default : break ;
}
Serial.print(" (Periodic packet)" );
}
Serial.println("" );
} ライブラリのインクルード 4行目では、MWings ライブラリ をインクルードしています。
ピン番号の定義 6-8行目では、ピン番号を定義しています。
const int RST_PIN = 5 ;
const int PRG_PIN = 4 ;
const int LED_PIN = 18 ; 名称 内容 RST_PINTWELITE の RST ピンが接続されているピンの番号 PRG_PINTWELITE の PRG ピンが接続されているピンの番号 LED_PIN基板上の ESP32 用 LED が接続されているピンの番号
TWELITE 設定の定義 10-11行目では、TWELITE SPOT に搭載された TWELITE 親機に適用する設定を定義しています。
const uint8_t TWE_CHANNEL = 18 ;
const uint32_t TWE_APP_ID = 0x67720102 ; 名称 内容 TWE_CHANNELTWELITE の 周波数チャネル TWE_APP_IDTWELITE の アプリケーション ID
シリアルポートの設定 19-21行目では、使用するシリアルポートを初期化するとともに、シリアルモニタへ起動メッセージを出力しています。
Serial.begin(115200 );
Serial.println("Monitor example for TWELITE SPOT: App_CUE (CUE Mode)" );
Serial2.begin(115200 ); Serial は、Arduino IDE の シリアルモニタとの通信に使います。シリアルモニタの設定に合わせて、ボーレートを 115200 bps としています。
一方、Serial2 は、TWELITE SPOT に搭載された TWELITE 親機との通信に使います。こちらも TWELITE 親機の初期設定に合わせて、ボーレートを 115200 bps としています。
TWELITE の設定 24-26行目では、Twelite.begin()
Twelite.begin(Serial2,
LED_PIN, RST_PIN, PRG_PIN,
TWE_CHANNEL, TWE_APP_ID); パケット受信時のイベントの登録 29-49行目では、Twelite.on()
ここでは、受信したパケットの内容をシリアルモニタに出力しています。
Twelite.on([](const ParsedAppCuePacket& packet) {
Serial.println("" );
Serial.print("Packet Number: #" );
Serial.println(packet.u16SequenceNumber, DEC);
Serial.print("Source Logical ID: 0x" );
Serial.println(packet.u8SourceLogicalId, HEX);
Serial.print("LQI: " );
Serial.println(packet.u8Lqi, DEC);
Serial.print("Supply Voltage: " );
Serial.print(packet.u16SupplyVoltage, DEC); Serial.println(" mV" );
Serial.print("Accel Event: " );
printAccelEvent(packet.u8AccelEvent);
Serial.print("Accel X Axis [0]: " );
Serial.print(packet.i16SamplesX[0 ], DEC); Serial.println(" mG" );
Serial.print("Accel Y Axis [0]: " );
Serial.print(packet.i16SamplesY[0 ], DEC); Serial.println(" mG" );
Serial.print("Accel Z Axis [0]: " );
Serial.print(packet.i16SamplesZ[0 ], DEC); Serial.println(" mG" );
Serial.print("Magnet State: " );
printMagnetState(packet.u8MagnetState, packet.bMagnetStateChanged);
}); 上記のイベントは、キューアプリ(TWELITE CUE モード)からのパケットを受信したときにだけ呼び出されます。
受信したパケットの内容は ParsedAppCuePacketpacket に格納されています。
メッセージの内容 メッセージ 内容 Packet Numberパケットの続き番号 Source Logical ID送信元 TWELITE の論理デバイスID LQI無線通信品質(0~255) Supply Voltage電源電圧 (mV) Accel Event加速度センサーの状態 Accel X AxisX 軸加速度(1サンプル目) Accel Y AxisY 軸加速度(1サンプル目) Accel Z AxisZ 軸加速度(1サンプル目) Magnet State磁気センサーの状態
加速度センサーの状態 出力される加速度センサーの状態は以下の通りです。
Dice (1) - Dice (6) サイコロの目(姿勢)を検知した。Shake 揺さぶるような動きを検知した。Move ゆっくりとした動きを検知した。磁気センサーの状態 出力される磁気センサーの状態は以下の通りです。
S-pole is getting closer 新たに磁石のS極を検知した。N-pole is getting closer 新たに磁石のN極を検知した。Leaving or Not found 磁石が検知できなかった。S-pole is close (Periodic packet) 磁石のS極を検知している。N-pole is close (Periodic packet) 磁石のN極を検知している。Not found (Periodic packet) 磁石を連続で検知できていない(定期送信パケット)。TWELITE のデータの更新 55行目では、Twelite.update()
3.5.1.3 - アリアアプリのデータを取得 アリアアプリのデータを取得・表示するサンプルスケッチ monitor_spot_app_aria の解説
アリアアプリ (App_ARIA) のデータを取得・表示するサンプルスケッチ
monitor_spot_app_aria の解説です。
3.5.1.3.1 - アリアアプリのデータを取得 最新版
アリアアプリ (App_ARIA) のデータを取得・表示するサンプルスケッチ
monitor_spot_app_aria の解説です。
サンプルスケッチの保存場所 MWings ライブラリを導入 していれば、Arduino IDE の ファイル -> スケッチ例 -> MWings -> TWELITE SPOT -> Receive -> monitor_spot_app_aria からスケッチを開くことができます。
保存場所の表示例
スケッチ 以下はソースコード本体です。
// Monitor example for TWELITE SPOT: Receive data from App_ARIA (ARIA Mode)
#include <Arduino.h>
#include "MWings.h"
const int RST_PIN = 5 ;
const int PRG_PIN = 4 ;
const int LED_PIN = 18 ;
const int8_t RX1_PIN = 16 ;
const int8_t TX1_PIN = 17 ;
const uint8_t TWE_CHANNEL = 18 ;
const uint32_t TWE_APP_ID = 0x67720102 ;
void printMagnetState (const uint8_t state, const bool changed);
void setup ()
{
// Initialize serial ports
115200 );
Serial.println("Monitor example for TWELITE SPOT: App_ARIA (ARIA Mode)" );
Serial2.begin(115200 , SERIAL_8N1, RX1_PIN, TX1_PIN);
// Initialize TWELITE
LED_PIN, RST_PIN, PRG_PIN,
TWE_CHANNEL, TWE_APP_ID);
// Attach an event handler to process packets from App_ARIA
const ParsedAppAriaPacket& packet) {
Serial.println("" );
Serial.print("Packet Number: #" );
Serial.println(packet.u16SequenceNumber, DEC);
Serial.print("Source Logical ID: 0x" );
Serial.println(packet.u8SourceLogicalId, HEX);
Serial.print("LQI: " );
Serial.println(packet.u8Lqi, DEC);
Serial.print("Supply Voltage: " );
Serial.print(packet.u16SupplyVoltage, DEC); Serial.println(" mV" );
Serial.print("Air Temperature: " );
Serial.print(packet.i16Temp100x / 100.0f , 2 ); Serial.println(" C" );
Serial.print("Relative Humidity: " );
Serial.print(packet.u16Humid100x / 100.0f , 2 ); Serial.println(" %" );
Serial.print("Magnet State: " );
printMagnetState(packet.u8MagnetState, packet.bMagnetStateChanged);
});
}
void loop ()
{
// Update TWELITE
}
void printMagnetState (const uint8_t state, const bool changed)
{
if (changed) {
switch (state) {
case 0x0 : { Serial.print("Leaving or not found" ); break ; }
case 0x1 : { Serial.print("N-pole is getting closer" ); break ; }
case 0x2 : { Serial.print("S-pole is getting closer" ); break ; }
default : break ;
}
} else {
switch (state) {
case 0x0 : { Serial.print("Not found" ); break ; }
case 0x1 : { Serial.print("N-pole is close" ); break ; }
case 0x2 : { Serial.print("S-pole is close" ); break ; }
default : break ;
}
Serial.print(" (Periodic packet)" );
}
Serial.println("" );
} ライブラリのインクルード 4行目では、MWings ライブラリ をインクルードしています。
ピン番号の定義 6-11行目では、ピン番号を定義しています。
const int RST_PIN = 5 ;
const int PRG_PIN = 4 ;
const int LED_PIN = 18 ;
const int8_t RX1_PIN = 16 ;
const int8_t TX1_PIN = 17 ; 名称 内容 RST_PINTWELITE の RST ピンが接続されているピンの番号 PRG_PINTWELITE の PRG ピンが接続されているピンの番号 LED_PIN基板上の ESP32 用 LED が接続されているピンの番号 RX1_PINTWELITE の RX1 ピンが接続されているピンの番号 TX1_PINTWELITE の TX1 ピンが接続されているピンの番号
TWELITE 設定の定義 13-14行目では、TWELITE SPOT に搭載された TWELITE 親機に適用する設定を定義しています。
const uint8_t TWE_CHANNEL = 18 ;
const uint32_t TWE_APP_ID = 0x67720102 ; 名称 内容 TWE_CHANNELTWELITE の 周波数チャネル TWE_APP_IDTWELITE の アプリケーション ID
シリアルポートの設定 21-23行目では、使用するシリアルポートを初期化するとともに、シリアルモニタへ起動メッセージを出力しています。
Serial.begin(115200 );
Serial.println("Monitor example for TWELITE SPOT: App_ARIA (ARIA Mode)" );
Serial2.begin(115200 , SERIAL_8N1, RX1_PIN, TX1_PIN); Serial は、Arduino IDE の シリアルモニタとの通信に使います。シリアルモニタの設定に合わせて、ボーレートを 115200 bps としています。
一方、Serial2 は、TWELITE SPOT に搭載された TWELITE 親機との通信に使います。こちらも TWELITE 親機の初期設定に合わせて、ボーレートを 115200 bps としています。
TWELITE の設定 26-28行目では、Twelite.begin()
Twelite.begin(Serial2,
LED_PIN, RST_PIN, PRG_PIN,
TWE_CHANNEL, TWE_APP_ID); パケット受信時のイベントの登録 31-47行目では、Twelite.on()
ここでは、受信したパケットの内容をシリアルモニタに出力しています。
Twelite.on([](const ParsedAppAriaPacket& packet) {
Serial.println("" );
Serial.print("Packet Number: #" );
Serial.println(packet.u16SequenceNumber, DEC);
Serial.print("Source Logical ID: 0x" );
Serial.println(packet.u8SourceLogicalId, HEX);
Serial.print("LQI: " );
Serial.println(packet.u8Lqi, DEC);
Serial.print("Supply Voltage: " );
Serial.print(packet.u16SupplyVoltage, DEC); Serial.println(" mV" );
Serial.print("Air Temperature: " );
Serial.print(packet.i16Temp100x / 100.0f , 2 ); Serial.println(" C" );
Serial.print("Relative Humidity: " );
Serial.print(packet.u16Humid100x / 100.0f , 2 ); Serial.println(" %" );
Serial.print("Magnet State: " );
printMagnetState(packet.u8MagnetState, packet.bMagnetStateChanged);
}); 上記のイベントは、アリアアプリ(TWELITE ARIA モード)からのパケットを受信したときにだけ呼び出されます。
受信したパケットの内容は ParsedAppAriaPacketpacket に格納されています。
メッセージの内容 メッセージ 内容 Packet Numberパケットの続き番号 Source Logical ID送信元 TWELITE の論理デバイスID LQI無線通信品質(0~255) Supply Voltage電源電圧 (mV) Air TemperatureTWELITE ARIA が計測した気温 (°C) Relative HumidityTWELITE ARIA が計測した相対湿度 (%) Magnet State磁気センサーの状態
磁気センサーの状態 出力される磁気センサーの状態は以下の通りです。
S-pole is getting closer 新たに磁石のS極を検知した。N-pole is getting closer 新たに磁石のN極を検知した。Leaving or Not found 磁石が検知できなかった。S-pole is close (Periodic packet) 磁石のS極を検知している。N-pole is close (Periodic packet) 磁石のN極を検知している。Not found (Periodic packet) 磁石を連続で検知できていない(定期送信パケット)。TWELITE のデータの更新 53行目では、Twelite.update()
3.5.1.3.2 - アリアアプリのデータを取得 v1.0.1
アリアアプリ (App_ARIA) のデータを取得・表示するサンプルスケッチ
monitor_spot_app_aria の解説です。
サンプルスケッチの保存場所 MWings ライブラリを導入 していれば、Arduino IDE の ファイル -> スケッチ例 -> MWings -> monitor_spot_app_aria からスケッチを開くことができます。
保存場所
スケッチ 以下はソースコード本体です。
// Monitor example for TWELITE SPOT: Receive data from App_ARIA (ARIA Mode)
#include <Arduino.h>
#include "MWings.h"
const int RST_PIN = 5 ;
const int PRG_PIN = 4 ;
const int LED_PIN = 18 ;
const uint8_t TWE_CHANNEL = 18 ;
const uint32_t TWE_APP_ID = 0x67720102 ;
void printMagnetState (const uint8_t state, const bool changed);
void setup ()
{
// Initialize serial ports
115200 );
Serial.println("Monitor example for TWELITE SPOT: App_ARIA (ARIA Mode)" );
Serial2.begin(115200 , SERIAL_8N1);
// Initialize TWELITE
LED_PIN, RST_PIN, PRG_PIN,
TWE_CHANNEL, TWE_APP_ID);
// Attach an event handler to process packets from App_ARIA
const ParsedAppAriaPacket& packet) {
Serial.println("" );
Serial.print("Packet Number: #" );
Serial.println(packet.u16SequenceNumber, DEC);
Serial.print("Source Logical ID: 0x" );
Serial.println(packet.u8SourceLogicalId, HEX);
Serial.print("LQI: " );
Serial.println(packet.u8Lqi, DEC);
Serial.print("Supply Voltage: " );
Serial.print(packet.u16SupplyVoltage, DEC); Serial.println(" mV" );
Serial.print("Air Temperature: " );
Serial.print(packet.i16Temp100x / 100.0f , 2 ); Serial.println(" C" );
Serial.print("Relative Humidity: " );
Serial.print(packet.u16Humid100x / 100.0f , 2 ); Serial.println(" %" );
Serial.print("Magnet State: " );
printMagnetState(packet.u8MagnetState, packet.bMagnetStateChanged);
});
}
void loop ()
{
// Update TWELITE
}
void printMagnetState (const uint8_t state, const bool changed)
{
if (changed) {
switch (state) {
case 0x0 : { Serial.print("Leaving or not found" ); break ; }
case 0x1 : { Serial.print("N-pole is getting closer" ); break ; }
case 0x2 : { Serial.print("S-pole is getting closer" ); break ; }
default : break ;
}
} else {
switch (state) {
case 0x0 : { Serial.print("Not found" ); break ; }
case 0x1 : { Serial.print("N-pole is close" ); break ; }
case 0x2 : { Serial.print("S-pole is close" ); break ; }
default : break ;
}
Serial.print(" (Periodic packet)" );
}
Serial.println("" );
} ライブラリのインクルード 4行目では、MWings ライブラリ をインクルードしています。
ピン番号の定義 6-8行目では、ピン番号を定義しています。
const int RST_PIN = 5 ;
const int PRG_PIN = 4 ;
const int LED_PIN = 18 ; 名称 内容 RST_PINTWELITE の RST ピンが接続されているピンの番号 PRG_PINTWELITE の PRG ピンが接続されているピンの番号 LED_PIN基板上の ESP32 用 LED が接続されているピンの番号
TWELITE 設定の定義 10-11行目では、TWELITE SPOT に搭載された TWELITE 親機に適用する設定を定義しています。
const uint8_t TWE_CHANNEL = 18 ;
const uint32_t TWE_APP_ID = 0x67720102 ; 名称 内容 TWE_CHANNELTWELITE の 周波数チャネル TWE_APP_IDTWELITE の アプリケーション ID
シリアルポートの設定 18-20行目では、使用するシリアルポートを初期化するとともに、シリアルモニタへ起動メッセージを出力しています。
Serial.begin(115200 );
Serial.println("Monitor example for TWELITE SPOT: App_ARIA (ARIA Mode)" );
Serial2.begin(115200 , SERIAL_8N1); Serial は、Arduino IDE の シリアルモニタとの通信に使います。シリアルモニタの設定に合わせて、ボーレートを 115200 bps としています。
一方、Serial2 は、TWELITE SPOT に搭載された TWELITE 親機との通信に使います。こちらも TWELITE 親機の初期設定に合わせて、ボーレートを 115200 bps としています。
TWELITE の設定 23-25行目では、Twelite.begin()
Twelite.begin(Serial2,
LED_PIN, RST_PIN, PRG_PIN,
TWE_CHANNEL, TWE_APP_ID); パケット受信時のイベントの登録 28-44行目では、Twelite.on()
ここでは、受信したパケットの内容をシリアルモニタに出力しています。
Twelite.on([](const ParsedAppAriaPacket& packet) {
Serial.println("" );
Serial.print("Packet Number: #" );
Serial.println(packet.u16SequenceNumber, DEC);
Serial.print("Source Logical ID: 0x" );
Serial.println(packet.u8SourceLogicalId, HEX);
Serial.print("LQI: " );
Serial.println(packet.u8Lqi, DEC);
Serial.print("Supply Voltage: " );
Serial.print(packet.u16SupplyVoltage, DEC); Serial.println(" mV" );
Serial.print("Air Temperature: " );
Serial.print(packet.i16Temp100x / 100.0f , 2 ); Serial.println(" C" );
Serial.print("Relative Humidity: " );
Serial.print(packet.u16Humid100x / 100.0f , 2 ); Serial.println(" %" );
Serial.print("Magnet State: " );
printMagnetState(packet.u8MagnetState, packet.bMagnetStateChanged);
}); 上記のイベントは、アリアアプリ(TWELITE ARIA モード)からのパケットを受信したときにだけ呼び出されます。
受信したパケットの内容は ParsedAppAriaPacketpacket に格納されています。
メッセージの内容 メッセージ 内容 Packet Numberパケットの続き番号 Source Logical ID送信元 TWELITE の論理デバイスID LQI無線通信品質(0~255) Supply Voltage電源電圧 (mV) Air TemperatureTWELITE ARIA が計測した気温 (°C) Relative HumidityTWELITE ARIA が計測した相対湿度 (%) Magnet State磁気センサーの状態
磁気センサーの状態 出力される磁気センサーの状態は以下の通りです。
S-pole is getting closer 新たに磁石のS極を検知した。N-pole is getting closer 新たに磁石のN極を検知した。Leaving or Not found 磁石が検知できなかった。S-pole is close (Periodic packet) 磁石のS極を検知している。N-pole is close (Periodic packet) 磁石のN極を検知している。Not found (Periodic packet) 磁石を連続で検知できていない(定期送信パケット)。TWELITE のデータの更新 50行目では、Twelite.update()
3.5.1.3.3 - アリアアプリのデータを取得 v1.1.3
アリアアプリ (App_ARIA) のデータを取得・表示するサンプルスケッチ
monitor_spot_app_aria の解説です。
サンプルスケッチの保存場所 MWings ライブラリを導入 していれば、Arduino IDE の ファイル -> スケッチ例 -> MWings -> TWELITE SPOT -> Receive -> monitor_spot_app_aria からスケッチを開くことができます。
保存場所の表示例
スケッチ 以下はソースコード本体です。
// Monitor example for TWELITE SPOT: Receive data from App_ARIA (ARIA Mode)
#include <Arduino.h>
#include "MWings.h"
const int RST_PIN = 5 ;
const int PRG_PIN = 4 ;
const int LED_PIN = 18 ;
const uint8_t TWE_CHANNEL = 18 ;
const uint32_t TWE_APP_ID = 0x67720102 ;
void printMagnetState (const uint8_t state, const bool changed);
void setup ()
{
// Initialize serial ports
115200 );
Serial.println("Monitor example for TWELITE SPOT: App_ARIA (ARIA Mode)" );
Serial2.begin(115200 , SERIAL_8N1);
// Initialize TWELITE
LED_PIN, RST_PIN, PRG_PIN,
TWE_CHANNEL, TWE_APP_ID);
// Attach an event handler to process packets from App_ARIA
const ParsedAppAriaPacket& packet) {
Serial.println("" );
Serial.print("Packet Number: #" );
Serial.println(packet.u16SequenceNumber, DEC);
Serial.print("Source Logical ID: 0x" );
Serial.println(packet.u8SourceLogicalId, HEX);
Serial.print("LQI: " );
Serial.println(packet.u8Lqi, DEC);
Serial.print("Supply Voltage: " );
Serial.print(packet.u16SupplyVoltage, DEC); Serial.println(" mV" );
Serial.print("Air Temperature: " );
Serial.print(packet.i16Temp100x / 100.0f , 2 ); Serial.println(" C" );
Serial.print("Relative Humidity: " );
Serial.print(packet.u16Humid100x / 100.0f , 2 ); Serial.println(" %" );
Serial.print("Magnet State: " );
printMagnetState(packet.u8MagnetState, packet.bMagnetStateChanged);
});
}
void loop ()
{
// Update TWELITE
}
void printMagnetState (const uint8_t state, const bool changed)
{
if (changed) {
switch (state) {
case 0x0 : { Serial.print("Leaving or not found" ); break ; }
case 0x1 : { Serial.print("N-pole is getting closer" ); break ; }
case 0x2 : { Serial.print("S-pole is getting closer" ); break ; }
default : break ;
}
} else {
switch (state) {
case 0x0 : { Serial.print("Not found" ); break ; }
case 0x1 : { Serial.print("N-pole is close" ); break ; }
case 0x2 : { Serial.print("S-pole is close" ); break ; }
default : break ;
}
Serial.print(" (Periodic packet)" );
}
Serial.println("" );
} ライブラリのインクルード 4行目では、MWings ライブラリ をインクルードしています。
ピン番号の定義 6-8行目では、ピン番号を定義しています。
const int RST_PIN = 5 ;
const int PRG_PIN = 4 ;
const int LED_PIN = 18 ; 名称 内容 RST_PINTWELITE の RST ピンが接続されているピンの番号 PRG_PINTWELITE の PRG ピンが接続されているピンの番号 LED_PIN基板上の ESP32 用 LED が接続されているピンの番号
TWELITE 設定の定義 10-11行目では、TWELITE SPOT に搭載された TWELITE 親機に適用する設定を定義しています。
const uint8_t TWE_CHANNEL = 18 ;
const uint32_t TWE_APP_ID = 0x67720102 ; 名称 内容 TWE_CHANNELTWELITE の 周波数チャネル TWE_APP_IDTWELITE の アプリケーション ID
シリアルポートの設定 18-20行目では、使用するシリアルポートを初期化するとともに、シリアルモニタへ起動メッセージを出力しています。
Serial.begin(115200 );
Serial.println("Monitor example for TWELITE SPOT: App_ARIA (ARIA Mode)" );
Serial2.begin(115200 , SERIAL_8N1); Serial は、Arduino IDE の シリアルモニタとの通信に使います。シリアルモニタの設定に合わせて、ボーレートを 115200 bps としています。
一方、Serial2 は、TWELITE SPOT に搭載された TWELITE 親機との通信に使います。こちらも TWELITE 親機の初期設定に合わせて、ボーレートを 115200 bps としています。
TWELITE の設定 23-25行目では、Twelite.begin()
Twelite.begin(Serial2,
LED_PIN, RST_PIN, PRG_PIN,
TWE_CHANNEL, TWE_APP_ID); パケット受信時のイベントの登録 28-44行目では、Twelite.on()
ここでは、受信したパケットの内容をシリアルモニタに出力しています。
Twelite.on([](const ParsedAppAriaPacket& packet) {
Serial.println("" );
Serial.print("Packet Number: #" );
Serial.println(packet.u16SequenceNumber, DEC);
Serial.print("Source Logical ID: 0x" );
Serial.println(packet.u8SourceLogicalId, HEX);
Serial.print("LQI: " );
Serial.println(packet.u8Lqi, DEC);
Serial.print("Supply Voltage: " );
Serial.print(packet.u16SupplyVoltage, DEC); Serial.println(" mV" );
Serial.print("Air Temperature: " );
Serial.print(packet.i16Temp100x / 100.0f , 2 ); Serial.println(" C" );
Serial.print("Relative Humidity: " );
Serial.print(packet.u16Humid100x / 100.0f , 2 ); Serial.println(" %" );
Serial.print("Magnet State: " );
printMagnetState(packet.u8MagnetState, packet.bMagnetStateChanged);
}); 上記のイベントは、アリアアプリ(TWELITE ARIA モード)からのパケットを受信したときにだけ呼び出されます。
受信したパケットの内容は ParsedAppAriaPacketpacket に格納されています。
メッセージの内容 メッセージ 内容 Packet Numberパケットの続き番号 Source Logical ID送信元 TWELITE の論理デバイスID LQI無線通信品質(0~255) Supply Voltage電源電圧 (mV) Air TemperatureTWELITE ARIA が計測した気温 (°C) Relative HumidityTWELITE ARIA が計測した相対湿度 (%) Magnet State磁気センサーの状態
磁気センサーの状態 出力される磁気センサーの状態は以下の通りです。
S-pole is getting closer 新たに磁石のS極を検知した。N-pole is getting closer 新たに磁石のN極を検知した。Leaving or Not found 磁石が検知できなかった。S-pole is close (Periodic packet) 磁石のS極を検知している。N-pole is close (Periodic packet) 磁石のN極を検知している。Not found (Periodic packet) 磁石を連続で検知できていない(定期送信パケット)。TWELITE のデータの更新 50行目では、Twelite.update()
3.5.2 - TWELITE に加えて無線 LAN を活用するスケッチの解説 TWELITE SPOT の応用的なサンプルスケッチの解説
TWELITE NET に加えて無線 LAN を活用した高度なサンプルスケッチを解説します。
3.5.2.1 - プリインストール済みスケッチ 子機からのデータを Web ページに表示するローカルサーバのサンプルスケッチ spot-server の解説
spot-server は、工場出荷時の TWELITE SPOT にプリインストールされています。
無線 LAN アクセスポイントとして振る舞い、Web ページ上に子機からのデータを表示するサンプルスケッチ
spot-server の解説です。
3.5.2.1.1 - プリインストール済みスケッチ 最新(ESP32 Arduino Core v3.x.x)版
無線 LAN アクセスポイントとして振る舞い、Web ページ上に子機からのデータを表示するサンプルスケッチ
spot-server の解説です。
spot-server は工場出荷時の TWELITE SPOT にプリインストールされています。
本稿では、サードパーティのオープンソースソフトウェアを使用します。
サードパーティのソフトウェアについて、その詳しい使用方法を弊社からご案内することはいたしかねます。また、サードパーティのソフトウェアを使用されたことによるいかなる損害についても、弊社は一切の責任を負いません。
ソースコードの入手 GitHub (monowireless/spot-server ) から入手できます。
システムの概要 spot-server は、TWELITE からのデータ受信と転送を行う Arduino スケッチ (.ino) と、スマホに配信する Web ページ (.html / .css / .js) で構成しています。
イメージ図
TWELITE 子機が送信したデータは Arduino スケッチで受信され、Arduino スケッチは公開中の Web ページに対してイベントを発火します。公開された Web ページでは、発火されたイベントに応じて HTML の内容を動的に書き換えています。
Web ページの開発には、HTML、CSS、ECMAScript (JavaScript) といった Web 技術に関する知識が必要です。
開発に必要なもの 環境整備 IDE とツールチェインの導入 Arduino IDE 1.x による開発環境の構築方法 をご覧ください。
または
Arduino IDE 2.x による開発環境の構築方法 をご覧ください。
ライブラリの導入 はじめに、Arduino のスケッチブックの保存場所(Arduino IDE 環境設定に記載。例:C:\Users\foo\Documents\Arduino) に libraries フォルダがない場合は、これを作成します。
非同期 TCP 通信ライブラリ 1. GitHub (me-no-dev/AsyncTCP) から Zip ファイルをダウンロードします2. Zip ファイルを展開し、フォルダ名を AsyncTCP-master から AsyncTCP に変更します3. libraries フォルダに AsyncTCP フォルダを配置します
ライブラリマネージャを開き、Async TCP をインストールします。
非同期 Web サーバライブラリ 1. GitHub (me-no-dev/ESPAsyncWebServer) から Zip ファイルをダウンロードします2. Zip ファイルを展開し、フォルダ名を AsyncWebServer-master から AsyncWebServer に変更します3. libraries フォルダに AsyncWebServer フォルダを配置します
ライブラリマネージャを開き、ESP Async WebServer をインストールします。
OLED ディスプレイライブラリ GitHub (Seeed-Studio/OLED_Display_96X96) から Zip ファイルをダウンロードしますZip ファイルを展開し、フォルダ名を OLED_Display_96X96-master から OLED_Display_96X96 に変更します libraries フォルダに OLED_Display_96X96 フォルダを配置しますJSON ライブラリ ライブラリマネージャを開き、Arduino_JSON をインストールします。
ここでは、サードパーティの ArduinoJson ではなく、公式の Arduino_JSON を使用します。
プラグインの導入 ファイルシステム書き込みプラグイン HTML などのファイルを ESP32 のフラッシュ領域に書き込むには、Arduino プラグインが必要です。
Arduino IDE 1.x の場合 Arduino IDE 1.x (Legacy版) では、lorol/arduino-esp32fs-plugin: Arduino plugin for uploading files to ESP32 file system を利用します(LittleFSに対応したもの)。
インストール方法は TWELITE SPOT マニュアル ESP32 へのファイルの書き込み方法(Arduino IDE 1.x) をご覧ください。
Arduino IDE 2.x の場合 Arduino IDE 2.x では、earlephilhower/arduino-littlefs-upload: Build and uploads LittleFS filesystems for the Arduino-Pico RP2040, RP2350, ESP8266, and ESP32 cores under Arduino IDE 2.2.1 or higher を利用します。
インストール方法は TWELITE SPOT マニュアル ESP32 へのファイルの書き込み方法(Arduino IDE 2.x) をご覧ください。
プロジェクトファイルの入手 GitHub (monowireless/spot-server) から Zip ファイルをダウンロードしますZip ファイルを展開し、フォルダ名を spot-server-main から spot-server に変更します Arduino のスケッチブックの保存場所(Arduino IDE 環境設定に記載。例:C:\Users\foo\Documents\Arduino)に spot-server フォルダを配置します プロジェクトファイルの書き込み方法 スケッチ ESP32 へのスケッチの書き込み方法 をご覧ください。
Web ページ ESP32 へのファイルの書き込み方法(Arduino IDE 1.x) をご覧ください。
または
ESP32 へのファイルの書き込み方法(Arduino IDE 2.x) をご覧ください。
スケッチ Arduino スケッチ spot-server.ino の解説です。
ライブラリのインクルード Arduino および ESP32 公式ライブラリ 4-9行目では、Arduino および ESP32 の公式ライブラリをインクルードしています。
#include <Arduino.h>
#include <Arduino_JSON.h>
#include <ESPmDNS.h>
#include <LittleFS.h>
#include <WiFi.h>
#include "esp_wifi.h"
#include <Wire.h> ヘッダファイル 内容 備考 Arduino.hArduino の基本ライブラリ 省略できる場合もあるが念のため記載 Arduino_JSON.hJSON 文字列を扱う ArduinoJsonとは異なるESPmDNS.hmDNS を使う ホスト名を使うために必要 LittleFS.hLittleFS ファイルシステムを扱う ページ公開に必要 WiFi.hESP32 の WiFi を使う esp_wifi.hWiFiの高度な設定を行う ロケール設定に必要 Wire.hI2C を使う OLED ディスプレイ用
サードパーティのライブラリ 13-15行目では、サードパーティのライブラリをインクルードしています。
#include <AsyncTCP.h>
#include <ESPAsyncWebServer.h>
#include <SeeedGrayOLED.h> ヘッダファイル 内容 備考 AsyncTCP.h非同期 TCP 通信を行う ESPAsyncWebServer.h非同期 Web サーバを立てる AsyncTCP に依存SeeedGrayOLED.hOLED ディスプレイを使う
MWings ライブラリ 18行目では、MWings ライブラリをインクルードしています。
ピン番号の定義 21-25行目では、ピン番号を定義しています。
const uint8_t TWE_RST = 5 ;
const uint8_t TWE_PRG = 4 ;
const uint8_t LED = 18 ;
const uint8_t ESP_RXD1 = 16 ;
const uint8_t ESP_TXD1 = 17 ;
他の簡単なサンプルとは異なり、このスケッチでは、厳格に ESP32 の UART ピンを指定した例を示します。
名称 内容 TWE_RSTTWELITE の RST ピンが接続されているピンの番号 TWE_PRGTWELITE の PRG ピンが接続されているピンの番号 LED基板上の ESP32 用 LED が接続されているピンの番号 ESP_RXD1TWELITE の TX ピンが接続されているピンの番号 ESP_TXD1TWELITE の RX ピンが接続されているピンの番号
TWELITE 設定の定義 28-31行目では、TWELITE SPOT に搭載された TWELITE 親機に適用する設定を定義しています。
const uint8_t TWE_CH = 18 ;
const uint32_t TWE_APPID = 0x67720102 ;
const uint8_t TWE_RETRY = 2 ;
const uint8_t TWE_POWER = 3 ; 名称 内容 TWE_CHTWELITE の 周波数チャネル TWE_APPIDTWELITE の アプリケーション ID TWE_RETRYTWELITE の 再送回数(送信時) TWE_POWERTWELITE の 送信出力
このサンプルでは、TWELITE 親機からのコマンド送信を行わないため、29-30行目の内容は関係ありません。
無線 LAN 設定の定義 34-46行目では、TWELITE SPOT に搭載された ESP32 に適用する無線 LAN 設定を定義しています。
wifi_country_t WIFI_COUNTRY_JP = {
cc: "JP" , // Contry code
1 , // Starting channel
14 , // Number of channels
20 , // Maximum power in dBm
};
const char * WIFI_SSID_BASE = "TWELITE SPOT" ;
const char * WIFI_PASSWORD = "twelitespot" ;
const uint8_t WIFI_CH = 13 ;
const IPAddress WIFI_IP = IPAddress(192 , 168 , 1 , 1 );
const IPAddress WIFI_MASK = IPAddress(255 , 255 , 255 , 0 );
const char * HOSTNAME = "spot" ; // spot.local
名称 内容 WIFI_COUNTRY_JPロケール設定(日本) WIFI_SSID_BASESSID の共通部分の文字列 WIFI_PASSWORDパスワード WIFI_CHESP32 の周波数チャネル WIFI_IPIP アドレス WIFI_MASKサブネットマスク HOSTNAMEホスト名
グローバルオブジェクトの宣言 49-50行目では、グローバルオブジェクトを宣言しています。
AsyncWebServer server (80 );
AsyncEventSource events ("/events" ); 名称 内容 server80番ポートで開く非同期 Web サーバのインタフェース events/eventsで開くサーバー送信イベント ? のインタフェース
関数プロトタイプの宣言 53-57行目では、関数プロトタイプを宣言しています。
uint16_t createUidFromMac ();
String createJsonFrom (const ParsedAppTwelitePacket& packet);
String createJsonFrom (const ParsedAppAriaPacket& packet);
String createJsonFrom (const ParsedAppCuePacket& packet);
String createJsonFrom (const BarePacket& packet); 名称 内容 createUidFromMac()MAC アドレスから SSID に使う識別子を作ります createJsonFrom()<ParsedAppTwelitePacket&>App_Twelite のパケットデータから JSON 文字列を作ります createJsonFrom()<ParsedAppAriaPacket&>App_ARIA のパケットデータから JSON 文字列を作ります createJsonFrom()<ParsedAppCuePacket&>App_CUE のパケットデータから JSON 文字列を作ります createJsonFrom()<BarePacket&>すべてのパケットデータから JSON 文字列を作ります
TWELITE の設定 66-71行目では、Twelite.begin()
Serial2.begin(115200 , SERIAL_8N1, ESP_RXD1, ESP_TXD1);
if (Twelite.begin(Serial2,
LED, TWE_RST, TWE_PRG,
TWE_CH, TWE_APPID, TWE_RETRY, TWE_POWER)) {
Serial.println("Started TWELITE." );
} 引数 型 内容 Serial2HardwareSerial&TWELITE との通信に使うシリアルポート LEDintステータス LED を接続したピンの番号 TWE_RSTintTWELITE の RST ピンを接続したピンの番号 TWE_PRGintTWELITE の PRG ピンを接続したピンの番号 TWE_CHANNELuint8_tTWELITE の 周波数チャネル TWE_APP_IDuint32_tTWELITE の アプリケーション ID TWE_RETRYuint8_tTWELITE の 再送回数(送信時) TWE_POWERuint8_tTWELITE の 送信出力
App_Twelite:イベントハンドラの登録 73-80行目では、Twelite.on() <ParsedAppTwelitePacket>
Twelite.on([](const ParsedAppTwelitePacket& packet) {
Serial.println("Received a packet from App_Twelite" );
String jsonStr = createJsonFrom(packet);
if (not(jsonStr.length() <= 0 )) {
events.send(jsonStr.c_str(), "data_app_twelite" , millis());
}
events.send("parsed_app_twelite" , "data_parsing_result" , millis());
}); JSON 文字列の作成 75行目では、受信したデータからJSON 文字列を生成しています。
String jsonStr = createJsonFrom(packet); 受信したデータをWeb ページに表示するにはクライアント側の JavaScript にデータを送る必要がありますが、このとき文字列データのほうが扱いやすいため、JSON 文字列としています。
Web ページへのイベント送信 76-78行目では、生成した JSON 文字列を “Signal Viewer” ページへ送信しています。
if (not(jsonStr.length() <= 0 )) {
events.send(jsonStr.c_str(), "data_app_twelite" , millis());
} イベント名は data_app_twelite です。
各イベントに割り当てる ID には、millis() で取得した現在時刻を使用しています。
79行目では、App_Twelite からのパケットを受信したことを “Serial Viewer” ページへ送信しています。
events.send("parsed_app_twelite" , "data_parsing_result" , millis()); App_ARIA:イベントハンドラの登録 82-92行目では、Twelite.on() <ParsedAppAriaPacket>
Twelite.on([](const ParsedAppAriaPacket& packet) {
Serial.println("Received a packet from App_ARIA" );
static uint32_t firstSourceSerialId = packet.u32SourceSerialId;
if (packet.u32SourceSerialId == firstSourceSerialId) {
String jsonStr = createJsonFrom(packet);
if (not(jsonStr.length() <= 0 )) {
events.send(jsonStr.c_str(), "data_app_aria_twelite_aria_mode" , millis());
}
}
events.send("parsed_app_aria_twelite_aria_mode" , "data_parsing_result" , millis());
}); 対象の絞り込み 84-85行目では、処理の対象を 最初に受信した子機 に限定しています。
static uint32_t firstSourceSerialId = packet.u32SourceSerialId;
if (packet.u32SourceSerialId == firstSourceSerialId) { こうしておかないと、複数の子機があった際にグラフの一貫性が失われてしまうからです。
JSON 文字列の作成 86行目では、受信したデータからJSON 文字列を生成しています。
String jsonStr = createJsonFrom(packet); Web ページへのイベント送信 87-89行目では、生成した JSON 文字列を “ARIA Viewer” ページへ送信しています。
if (not(jsonStr.length() <= 0 )) {
events.send(jsonStr.c_str(), "data_app_aria_twelite_aria_mode" , millis());
} イベント名は data_app_aria_twelite_aria_mode です。
91行目では、App_Twelite からのパケットを受信したことを “Serial Viewer” ページへ送信しています。
events.send("parsed_app_aria_twelite_aria_mode" , "data_parsing_result" , millis()); App_CUE:イベントハンドラの登録 94-104行目では、Twelite.on() <ParsedAppCuePacket>
Twelite.on([](const ParsedAppCuePacket& packet) {
Serial.println("Received a packet from App_CUE" );
static uint32_t firstSourceSerialId = packet.u32SourceSerialId;
if (packet.u32SourceSerialId == firstSourceSerialId) {
String jsonStr = createJsonFrom(packet);
if (not(jsonStr.length() <= 0 )) {
events.send(jsonStr.c_str(), "data_app_cue_twelite_cue_mode" , millis());
}
}
events.send("parsed_app_cue_twelite_cue_mode" , "data_parsing_result" , millis());
}); その他:イベントハンドラの登録 106-134行目では、その他のアプリの子機からのパケットを受信した際に行う処理を登録しています。
アリアアプリ等と同様に “Serial Viewer” へイベントを送信しています。
すべて:イベントハンドラの登録 136-142行目では、すべてのアプリの子機からのパケットを受信した際に行う処理を登録しています。
Twelite.on([](const BarePacket& packet) {
String jsonStr = createJsonFrom(packet);
if (not(jsonStr.length() <= 0 )) {
events.send(jsonStr.c_str(), "data_bare_packet" , millis());
}
events.send("unparsed_bare_packet" , "data_parsing_result" , millis());
}); ここでも、“Serial Viewer” に対するパケットデータ文字列の送信を行っています。
OLED ディスプレイの設定 145-151行目では、OLED ディスプレイの設定を行っています。
esp_log_level_set("i2c.master" , ESP_LOG_NONE);
Wire.begin();
SeeedGrayOled.init(SSD1327);
SeeedGrayOled.setNormalDisplay();
SeeedGrayOled.setVerticalMode();
SeeedGrayOled.setGrayLevel(0x0F );
SeeedGrayOled.clearDisplay();
OLED を接続していない場合は何も起こりませんエラーを無視します。
無線 LAN の設定 155-166行目では、無線 LAN の設定を行っています。
WiFi.mode(WIFI_AP);
esp_wifi_set_country(& WIFI_COUNTRY_JP);
char uidCString[8 ];
sprintf(uidCString, " (%02X)" , createUidFromMac());
char ssidCString[20 ];
sprintf(ssidCString, "%s%s" , WIFI_SSID_BASE, uidCString);
if (not WiFi.softAP(ssidCString, WIFI_PASSWORD, WIFI_CH, false, 10 )) {
Serial.println("Failed to start AP" );
}
delay(100 ); // IMPORTANT: Waiting for SYSTEM_EVENT_AP_START
MDNS.begin(HOSTNAME);
delay(100) を省略すると初期化に失敗することがあります。
ファイルシステムの設定 199行目では、LittleFS ファイルシステムを設定しています。
if (LittleFS.begin()) { Serial.println("Mounted file system." ); } フラッシュ領域内に書き込んだ HTML などのファイルをページとして取得することができるようになります。
Web サーバの設定 202-229行目では、Web サーバの設定を行っています。
GET リクエストのハンドリング 例えば、207-211行目 では /signal-viewer への GET リクエストに対して、LittleFS ファイルシステム上の /signal-viewer.html を返しています。
server.on("/signal-viewer" , HTTP_GET,
[](AsyncWebServerRequest* request) {
Serial.println("HTTP_GET: signal-viewer.html" );
request-> send(LittleFS, "/signal-viewer.html" , "text/html" );
}); サーバの初期化 227-229行目では、ファイルシステム上のルートをサーバのルートとして設定したあと、イベントソースを登録してサーバを立ち上げています。
server.serveStatic("/" , LittleFS, "/" );
server.addHandler(& events);
server.begin(); TWELITE のデータの更新 235行目では、Twelite.update()
Twelite.update() は、TWELITE 親機から送信されるパケットデータ(ModBus ASCII 形式)を順次1バイトずつ読み出す関数です。
loop() 内で繰り返し
Twelite.update() を呼ぶことで、TWELITE 親機から送信されるパケットデータの解釈が進みます。パケットデータの解釈を終えた際に
上記 のようなイベントが呼ばれる仕組みです。
delay() などの処理でこの関数の呼び出しをブロックすると、パケットデータ文字列の読み出しが間に合わないことがあります。時間のかかる処理は必ず非同期の実装として、
loop() 関数をできるだけ高速回転させるようにしてください。
Web ページ Web ページに関しては、詳しい解説を行いません。重要なポイントに絞って解説します。
HTML:グリッドシステム このサンプルの HTML では、Flexbox Grid を使っています(ソースファイルは data/css/flexboxgrid.min.css)。
下記のようにして Bootstrap に似た 12 分割のグリッドシステムを使用しています。
<div class = "col-xs-6 col-sm-6 col-md-5 col-lg-4" >
<div class = "neumorphic inset dense row center-xs middle-xs" >
<div class = "col-xs-12 col-sm-12 col-md-12 col-lg-12 npr npl" >
<img src = "./images/logo-lands.svg" class = "logo" />
</div >
</div >
</div >
<div class = "col-xs-6 col-sm-6 col-md-7 col-lg-8" >
<div class = "neumorphic inset dense row center-xs middle-xs" >
<div class = "col-xs-12 col-sm-12 col-md-12 col-lg-12 nwp npr npl" >
<span class = "medium bold" >TWELITE SPOT</span >
</div >
<div class = "col-xs-12 col-sm-12 col-md-12 col-lg-12 nwp npr npl" >
<span class = "small bold" >CUE Viewer</span >
</div >
</div >
</div > ここでは、ロゴを中心とした要素の幅を 6/12 、文字列を中心とした要素の幅を 6/12 、すなわち両者を等しい幅で一列に配置しています。また、文字列 TWELITE SPOT を中心とした要素と CUE Viewer を中心とした要素の幅はどちらも 12/12 、すなわち1行ずつ2行に分けて配置しています。
xs- や sm- などは画面の幅を指定します。レスポンシブデザインに活用できます。
HTML:データ表示部 TWELITE 子機から受信したデータを表示する要素には、一意の ID を付与しています。
以下は TWELITE CUE から受信した X 軸加速度を表示する部分の抜粋です。
<div class = "col-xs-4 nwp npr npl" >
<code class = "medium"
id = "latest-accel-x" >±--.--</code >
<code class = "small" >G</code >
</div > ここでは、ID として latest-accel-x を付与しています。この ID を使って、スクリプトから値を書き換えます。
JS:グローバル変数 4-8行目では、最新の加速度値を保存するためのグローバル変数を宣言しています。
let latest_accel = {
x : 0.0 ,
y : 0.0 ,
z : 0.0
}; この値はグラフからも利用するため、実装を簡素にするためにグローバル変数を使用しています。
JS:グラフ設定 11-133行目では、グラフ描画ライブラリ Chart.js | Chart.js およびそのプラグイン chartjs-plugin-streaming の設定を行っています。
JS:ページ内容の更新 136-235行目の関数 processDataAppCueTweliteCueMode()data_app_cue_twelite_cue_mode イベントを受信した際にページ内容を更新する関数です。
例えば、184-208行目では、TWELITE CUE の電源電圧に応じて電圧値と絵文字を更新しています。
if (data .vcc >= 3000 ) {
document.getElementById ("latest-vcc-icon" ).innerHTML = "🔋" ;
document.getElementById ("latest-vcc-data" ).innerHTML = ` ${ (data .vcc / 1000.0 ).toFixed (2 ).toString ().padStart (4 )} ` ;
document.getElementById ("latest-vcc-data" ).classList .remove ("red" );
document.getElementById ("latest-vcc-data" ).classList .remove ("yellow" );
document.getElementById ("latest-vcc-data" ).classList .add ("green" );
} else if (data .vcc >= 2700 ) {
document.getElementById ("latest-vcc-icon" ).innerHTML = "🔋" ;
document.getElementById ("latest-vcc-data" ).innerHTML = ` ${ (data .vcc / 1000.0 ).toFixed (2 ).toString ().padStart (4 )} ` ;
document.getElementById ("latest-vcc-data" ).classList .remove ("red" );
document.getElementById ("latest-vcc-data" ).classList .remove ("yellow" );
document.getElementById ("latest-vcc-data" ).classList .remove ("green" );
} else if (data .vcc >= 2400 ) {
document.getElementById ("latest-vcc-icon" ).innerHTML = "🪫" ;
document.getElementById ("latest-vcc-data" ).innerHTML = ` ${ (data .vcc / 1000.0 ).toFixed (2 ).toString ().padStart (4 )} ` ;
document.getElementById ("latest-vcc-data" ).classList .remove ("red" );
document.getElementById ("latest-vcc-data" ).classList .add ("yellow" );
document.getElementById ("latest-vcc-data" ).classList .remove ("green" );
} else {
document.getElementById ("latest-vcc-icon" ).innerHTML = "🪫" ;
document.getElementById ("latest-vcc-data" ).innerHTML = ` ${ (data .vcc / 1000.0 ).toFixed (2 ).toString ().padStart (4 )} ` ;
document.getElementById ("latest-vcc-data" ).classList .add ("red" );
document.getElementById ("latest-vcc-data" ).classList .remove ("yellow" );
document.getElementById ("latest-vcc-data" ).classList .remove ("green" );
} ここでは、電源電圧が 2700mV 未満に降下した際に絵文字を 🔋 から 🪫 に変えているほか、3000mV → 2700mV → 2400mV と電圧降下に従って電圧値の文字色を適用する CSS クラスを入れ替えています。
イベントリスナーの登録 254-257行目では、スケッチからのイベントを受信した際の処理を登録しています。
source .addEventListener ("data_app_cue_twelite_cue_mode" , (e ) => {
console .log ("data_app_cue_twelite_cue_mode" , e .data );
processDataAppCueTweliteCueMode (JSON .parse (e .data ));
}, false ); ここでは、スケッチより 受信したイベントメッセージから JSON 文字列を取り出し、パースしたデータを先ほどの関数 processDataAppCueTweliteCueMode() へ渡しています。
関連情報 Arduino ESP32 コミュニティ ライブラリ プラグイン Web関連 ECMAScript (JavaScript) コミュニティ 3.5.2.1.2 - プリインストール済みスケッチ ESP32 Arduino Core v2.x.x 版
無線 LAN アクセスポイントとして振る舞い、Web ページ上に子機からのデータを表示するサンプルスケッチ
spot-server の解説です。
spot-server は工場出荷時の TWELITE SPOT にプリインストールされています。
本稿では、サードパーティのオープンソースソフトウェアを使用します。
サードパーティのソフトウェアについて、その詳しい使用方法を弊社からご案内することはいたしかねます。また、サードパーティのソフトウェアを使用されたことによるいかなる損害についても、弊社は一切の責任を負いません。
ソースコードの入手 GitHub (monowireless/spot-server ) から入手できます。
システムの概要 spot-server は、TWELITE からのデータ受信と転送を行う Arduino スケッチ (.ino) と、スマホに配信する Web ページ (.html / .css / .js) で構成しています。
イメージ図
TWELITE 子機が送信したデータは Arduino スケッチで受信され、Arduino スケッチは公開中の Web ページに対してイベントを発火します。公開された Web ページでは、発火されたイベントに応じて HTML の内容を動的に書き換えています。
Web ページの開発には、HTML、CSS、ECMAScript (JavaScript) といった Web 技術に関する知識が必要です。
開発に必要なもの 環境整備 IDE とツールチェインの導入 Arduino IDE 1.x による開発環境の構築方法 をご覧ください。
ライブラリの導入 はじめに、Arduino のスケッチブックの保存場所(Arduino IDE 環境設定に記載。例:C:\Users\foo\Documents\Arduino) に libraries フォルダがない場合は、これを作成します。
非同期 TCP 通信ライブラリ GitHub (me-no-dev/AsyncTCP) から Zip ファイルをダウンロードしますZip ファイルを展開し、フォルダ名を AsyncTCP-master から AsyncTCP に変更します libraries フォルダに AsyncTCP フォルダを配置します非同期 Web サーバライブラリ GitHub (me-no-dev/ESPAsyncWebServer) から Zip ファイルをダウンロードしますZip ファイルを展開し、フォルダ名を AsyncWebServer-master から AsyncWebServer に変更します libraries フォルダに AsyncWebServer フォルダを配置しますOLED ディスプレイライブラリ GitHub (Seeed-Studio/OLED_Display_96X96) から Zip ファイルをダウンロードしますZip ファイルを展開し、フォルダ名を OLED_Display_96X96-master から OLED_Display_96X96 に変更します libraries フォルダに OLED_Display_96X96 フォルダを配置しますJSON ライブラリ ライブラリマネージャを開き、Arduino_JSON をインストールします。
サードパーティの ArduinoJson ではなく、公式の Arduino_JSON を使用します。
プラグインの導入 ファイルシステム書き込みプラグイン HTML などのファイルを ESP32 のフラッシュ領域に書き込むには、Arduino プラグインが必要です。
ここでは、lorol/arduino-esp32fs-plugin: Arduino plugin for uploading files to ESP32 file system を利用します。
インストール方法は TWELITE SPOT マニュアル ESP32 へのファイルの書き込み方法 をご覧ください。
プロジェクトファイルの入手 GitHub (monowireless/spot-server) から Zip ファイルをダウンロードしますZip ファイルを展開し、フォルダ名を spot-server-main から spot-server に変更します Arduino のスケッチブックの保存場所(Arduino IDE 環境設定に記載。例:C:\Users\foo\Documents\Arduino)に spot-server フォルダを配置します プロジェクトファイルの書き込み方法 スケッチ ESP32 へのスケッチの書き込み方法 をご覧ください。
Web ページ ESP32 へのファイルの書き込み方法 をご覧ください。
スケッチ Arduino スケッチ spot-server.ino の解説です。
ライブラリのインクルード Arduino および ESP32 公式ライブラリ 4-9行目では、Arduino および ESP32 の公式ライブラリをインクルードしています。
#include <Arduino.h>
#include <Arduino_JSON.h>
#include <ESPmDNS.h>
#include <LittleFS.h>
#include <WiFi.h>
#include <Wire.h> ヘッダファイル 内容 備考 Arduino.hArduino の基本ライブラリ 省略できる場合もあるが念のため記載 Arduino_JSON.hJSON 文字列を扱う ArduinoJsonとは異なるESPmDNS.hmDNS を使う ホスト名を使うために必要 LittleFS.hLittleFS ファイルシステムを扱う ページ公開に必要 WiFi.hESP32 の WiFi を使う Wire.hI2C を使う OLED ディスプレイ用
サードパーティのライブラリ 12-14行目では、サードパーティのライブラリをインクルードしています。
#include <AsyncTCP.h>
#include <ESPAsyncWebServer.h>
#include <SeeedGrayOLED.h> ヘッダファイル 内容 備考 AsyncTCP.h非同期 TCP 通信を行う ESPAsyncWebServer.h非同期 Web サーバを立てる AsyncTCP に依存SeeedGrayOLED.hOLED ディスプレイを使う
MWings ライブラリ 17行目では、MWings ライブラリをインクルードしています。
ピン番号の定義 20-24行目では、ピン番号を定義しています。
const uint8_t TWE_RST = 5 ;
const uint8_t TWE_PRG = 4 ;
const uint8_t LED = 18 ;
const uint8_t ESP_RXD1 = 16 ;
const uint8_t ESP_TXD1 = 17 ;
他の簡単なサンプルとは異なり、このスケッチでは、厳格に ESP32 の UART ピンを指定した例を示します。
名称 内容 TWE_RSTTWELITE の RST ピンが接続されているピンの番号 TWE_PRGTWELITE の PRG ピンが接続されているピンの番号 LED基板上の ESP32 用 LED が接続されているピンの番号 ESP_RXD1TWELITE の TX ピンが接続されているピンの番号 ESP_TXD1TWELITE の RX ピンが接続されているピンの番号
TWELITE 設定の定義 27-30行目では、TWELITE SPOT に搭載された TWELITE 親機に適用する設定を定義しています。
const uint8_t TWE_CH = 18 ;
const uint32_t TWE_APPID = 0x67720102 ;
const uint8_t TWE_RETRY = 2 ;
const uint8_t TWE_POWER = 3 ; 名称 内容 TWE_CHTWELITE の 周波数チャネル TWE_APPIDTWELITE の アプリケーション ID TWE_RETRYTWELITE の 再送回数(送信時) TWE_POWERTWELITE の 送信出力
このサンプルでは、TWELITE 親機からのコマンド送信を行わないため、29-30行目の内容は関係ありません。
無線 LAN 設定の定義 33-38行目では、TWELITE SPOT に搭載された ESP32 に適用する無線 LAN 設定を定義しています。
const char * WIFI_SSID_BASE = "TWELITE SPOT" ;
const char * WIFI_PASSWORD = "twelitespot" ;
const uint8_t WIFI_CH = 13 ;
const IPAddress WIFI_IP = IPAddress(192 , 168 , 1 , 1 );
const IPAddress WIFI_MASK = IPAddress(255 , 255 , 255 , 0 );
const char * HOSTNAME = "spot" ; // spot.local
名称 内容 WIFI_SSID_BASESSID の共通部分の文字列 WIFI_PASSWORDパスワード WIFI_CHESP32 の周波数チャネル WIFI_IPIP アドレス WIFI_MASKサブネットマスク HOSTNAMEホスト名
グローバルオブジェクトの宣言 41-42行目では、グローバルオブジェクトを宣言しています。
AsyncWebServer server (80 );
AsyncEventSource events ("/events" ); 名称 内容 server80番ポートで開く非同期 Web サーバのインタフェース events/eventsで開くサーバー送信イベント ? のインタフェース
関数プロトタイプの宣言 45-49行目では、関数プロトタイプを宣言しています。
uint16_t createUidFromMac ();
String createJsonFrom (const ParsedAppTwelitePacket& packet);
String createJsonFrom (const ParsedAppAriaPacket& packet);
String createJsonFrom (const ParsedAppCuePacket& packet);
String createJsonFrom (const BarePacket& packet); 名称 内容 createUidFromMac()MAC アドレスから SSID に使う識別子を作ります createJsonFrom()<ParsedAppTwelitePacket&>App_Twelite のパケットデータから JSON 文字列を作ります createJsonFrom()<ParsedAppAriaPacket&>App_ARIA のパケットデータから JSON 文字列を作ります createJsonFrom()<ParsedAppCuePacket&>App_CUE のパケットデータから JSON 文字列を作ります createJsonFrom()<BarePacket&>すべてのパケットデータから JSON 文字列を作ります
TWELITE の設定 58-63行目では、Twelite.begin()
Serial2.begin(115200 , SERIAL_8N1, ESP_RXD1, ESP_TXD1);
if (Twelite.begin(Serial2,
LED, TWE_RST, TWE_PRG,
TWE_CH, TWE_APPID, TWE_RETRY, TWE_POWER)) {
Serial.println("Started TWELITE." );
} 引数 型 内容 Serial2HardwareSerial&TWELITE との通信に使うシリアルポート LEDintステータス LED を接続したピンの番号 TWE_RSTintTWELITE の RST ピンを接続したピンの番号 TWE_PRGintTWELITE の PRG ピンを接続したピンの番号 TWE_CHANNELuint8_tTWELITE の 周波数チャネル TWE_APP_IDuint32_tTWELITE の アプリケーション ID TWE_RETRYuint8_tTWELITE の 再送回数(送信時) TWE_POWERuint8_tTWELITE の 送信出力
App_Twelite:イベントハンドラの登録 65-72行目では、Twelite.on() <ParsedAppTwelitePacket>
Twelite.on([](const ParsedAppTwelitePacket& packet) {
Serial.println("Received a packet from App_Twelite" );
String jsonStr = createJsonFrom(packet);
if (not(jsonStr.length() <= 0 )) {
events.send(jsonStr.c_str(), "data_app_twelite" , millis());
}
events.send("parsed_app_twelite" , "data_parsing_result" , millis());
}); JSON 文字列の作成 67行目では、受信したデータからJSON 文字列を生成しています。
String jsonStr = createJsonFrom(packet); 受信したデータをWeb ページに表示するにはクライアント側の JavaScript にデータを送る必要がありますが、このとき文字列データのほうが扱いやすいため、JSON 文字列としています。
Web ページへのイベント送信 68-70行目では、生成した JSON 文字列を “Signal Viewer” ページへ送信しています。
if (not(jsonStr.length() <= 0 )) {
events.send(jsonStr.c_str(), "data_app_twelite" , millis());
} イベント名は data_app_twelite です。
各イベントに割り当てる ID には、millis() で取得した現在時刻を使用しています。
71行目では、App_Twelite からのパケットを受信したことを “Serial Viewer” ページへ送信しています。
events.send("parsed_app_twelite" , "data_parsing_result" , millis()); App_ARIA:イベントハンドラの登録 74-84行目では、Twelite.on() <ParsedAppAriaPacket>
Twelite.on([](const ParsedAppAriaPacket& packet) {
Serial.println("Received a packet from App_ARIA" );
static uint32_t firstSourceSerialId = packet.u32SourceSerialId;
if (packet.u32SourceSerialId == firstSourceSerialId) {
String jsonStr = createJsonFrom(packet);
if (not(jsonStr.length() <= 0 )) {
events.send(jsonStr.c_str(), "data_app_aria_twelite_aria_mode" , millis());
}
}
events.send("parsed_app_aria_twelite_aria_mode" , "data_parsing_result" , millis());
}); 対象の絞り込み 76-77行目では、処理の対象を 最初に受信した子機 に限定しています。
static uint32_t firstSourceSerialId = packet.u32SourceSerialId;
if (packet.u32SourceSerialId == firstSourceSerialId) { こうしておかないと、複数の子機があった際にグラフの一貫性が失われてしまうからです。
JSON 文字列の作成 78行目では、受信したデータからJSON 文字列を生成しています。
String jsonStr = createJsonFrom(packet); Web ページへのイベント送信 79-81行目では、生成した JSON 文字列を “ARIA Viewer” ページへ送信しています。
if (not(jsonStr.length() <= 0 )) {
events.send(jsonStr.c_str(), "data_app_aria_twelite_aria_mode" , millis());
} イベント名は data_app_aria_twelite_aria_mode です。
83行目では、App_Twelite からのパケットを受信したことを “Serial Viewer” ページへ送信しています。
events.send("parsed_app_aria_twelite_aria_mode" , "data_parsing_result" , millis()); App_CUE:イベントハンドラの登録 86-96行目では、Twelite.on() <ParsedAppCuePacket>
Twelite.on([](const ParsedAppCuePacket& packet) {
Serial.println("Received a packet from App_CUE" );
static uint32_t firstSourceSerialId = packet.u32SourceSerialId;
if (packet.u32SourceSerialId == firstSourceSerialId) {
String jsonStr = createJsonFrom(packet);
if (not(jsonStr.length() <= 0 )) {
events.send(jsonStr.c_str(), "data_app_cue_twelite_cue_mode" , millis());
}
}
events.send("parsed_app_cue_twelite_cue_mode" , "data_parsing_result" , millis());
}); その他:イベントハンドラの登録 98-126行目では、その他のアプリの子機からのパケットを受信した際に行う処理を登録しています。
アリアアプリ等と同様に “Serial Viewer” へイベントを送信しています。
すべて:イベントハンドラの登録 128-134行目では、すべてのアプリの子機からのパケットを受信した際に行う処理を登録しています。
Twelite.on([](const BarePacket& packet) {
String jsonStr = createJsonFrom(packet);
if (not(jsonStr.length() <= 0 )) {
events.send(jsonStr.c_str(), "data_bare_packet" , millis());
}
events.send("unparsed_bare_packet" , "data_parsing_result" , millis());
}); ここでも、“Serial Viewer” に対するパケットデータ文字列の送信を行っています。
OLED ディスプレイの設定 137-142行目では、OLED ディスプレイの設定を行っています。
Wire.begin();
SeeedGrayOled.init(SSD1327);
SeeedGrayOled.setNormalDisplay();
SeeedGrayOled.setVerticalMode();
SeeedGrayOled.setGrayLevel(0x0F );
SeeedGrayOled.clearDisplay();
OLED を接続していない場合は何も起こりません。
無線 LAN の設定 146-154行目では、無線 LAN の設定を行っています。
WiFi.mode(WIFI_AP);
char uidCString[8 ];
sprintf(uidCString, " (%02X)" , createUidFromMac());
char ssidCString[20 ];
sprintf(ssidCString, "%s%s" , WIFI_SSID_BASE, uidCString);
WiFi.softAP(ssidCString, WIFI_PASSWORD, WIFI_CH, false, 8 );
delay(100 ); // IMPORTANT: Waiting for SYSTEM_EVENT_AP_START
MDNS.begin(HOSTNAME);
delay(100) を省略すると初期化に失敗することがあります。
ファイルシステムの設定 187行目では、LittleFS ファイルシステムを設定しています。
if (LittleFS.begin()) { Serial.println("Mounted file system." ); } フラッシュ領域内に書き込んだ HTML などのファイルをページとして取得することができるようになります。
Web サーバの設定 190-217行目では、Web サーバの設定を行っています。
GET リクエストのハンドリング 例えば、195-199行目 では /signal-viewer への GET リクエストに対して、LittleFS ファイルシステム上の /signal-viewer.html を返しています。
server.on("/signal-viewer" , HTTP_GET,
[](AsyncWebServerRequest* request) {
Serial.println("HTTP_GET: signal-viewer.html" );
request-> send(LittleFS, "/signal-viewer.html" , "text/html" );
}); サーバの初期化 215-217行目では、ファイルシステム上のルートをサーバのルートとして設定したあと、イベントソースを登録してサーバを立ち上げています。
server.serveStatic("/" , LittleFS, "/" );
server.addHandler(& events);
server.begin(); TWELITE のデータの更新 223行目では、Twelite.update()
Twelite.update() は、TWELITE 親機から送信されるパケットデータ(ModBus ASCII 形式)を順次1バイトずつ読み出す関数です。
loop() 内で繰り返し
Twelite.update() を呼ぶことで、TWELITE 親機から送信されるパケットデータの解釈が進みます。パケットデータの解釈を終えた際に
上記 のようなイベントが呼ばれる仕組みです。
delay() などの処理でこの関数の呼び出しをブロックすると、パケットデータ文字列の読み出しが間に合わないことがあります。時間のかかる処理は必ず非同期の実装として、
loop() 関数をできるだけ高速回転させるようにしてください。
Web ページ Web ページに関しては、詳しい解説を行いません。重要なポイントに絞って解説します。
HTML:グリッドシステム このサンプルの HTML では、Flexbox Grid を使っています(ソースファイルは data/css/flexboxgrid.min.css)。
下記のようにして Bootstrap に似た 12 分割のグリッドシステムを使用しています。
<div class = "col-xs-6 col-sm-6 col-md-5 col-lg-4" >
<div class = "neumorphic inset dense row center-xs middle-xs" >
<div class = "col-xs-12 col-sm-12 col-md-12 col-lg-12 npr npl" >
<img src = "./images/logo-lands.svg" class = "logo" />
</div >
</div >
</div >
<div class = "col-xs-6 col-sm-6 col-md-7 col-lg-8" >
<div class = "neumorphic inset dense row center-xs middle-xs" >
<div class = "col-xs-12 col-sm-12 col-md-12 col-lg-12 nwp npr npl" >
<span class = "medium bold" >TWELITE SPOT</span >
</div >
<div class = "col-xs-12 col-sm-12 col-md-12 col-lg-12 nwp npr npl" >
<span class = "small bold" >CUE Viewer</span >
</div >
</div >
</div > ここでは、ロゴを中心とした要素の幅を 6/12 、文字列を中心とした要素の幅を 6/12 、すなわち両者を等しい幅で一列に配置しています。また、文字列 TWELITE SPOT を中心とした要素と CUE Viewer を中心とした要素の幅はどちらも 12/12 、すなわち1行ずつ2行に分けて配置しています。
xs- や sm- などは画面の幅を指定します。レスポンシブデザインに活用できます。
HTML:データ表示部 TWELITE 子機から受信したデータを表示する要素には、一意の ID を付与しています。
以下は TWELITE CUE から受信した X 軸加速度を表示する部分の抜粋です。
<div class = "col-xs-4 nwp npr npl" >
<code class = "medium"
id = "latest-accel-x" >±--.--</code >
<code class = "small" >G</code >
</div > ここでは、ID として latest-accel-x を付与しています。この ID を使って、スクリプトから値を書き換えます。
JS:グローバル変数 4-8行目では、最新の加速度値を保存するためのグローバル変数を宣言しています。
let latest_accel = {
x : 0.0 ,
y : 0.0 ,
z : 0.0
}; この値はグラフからも利用するため、実装を簡素にするためにグローバル変数を使用しています。
JS:グラフ設定 11-133行目では、グラフ描画ライブラリ Chart.js | Chart.js およびそのプラグイン chartjs-plugin-streaming の設定を行っています。
JS:ページ内容の更新 136-235行目の関数 processDataAppCueTweliteCueMode()data_app_cue_twelite_cue_mode イベントを受信した際にページ内容を更新する関数です。
例えば、184-208行目では、TWELITE CUE の電源電圧に応じて電圧値と絵文字を更新しています。
if (data .vcc >= 3000 ) {
document.getElementById ("latest-vcc-icon" ).innerHTML = "🔋" ;
document.getElementById ("latest-vcc-data" ).innerHTML = ` ${ (data .vcc / 1000.0 ).toFixed (2 ).toString ().padStart (4 )} ` ;
document.getElementById ("latest-vcc-data" ).classList .remove ("red" );
document.getElementById ("latest-vcc-data" ).classList .remove ("yellow" );
document.getElementById ("latest-vcc-data" ).classList .add ("green" );
} else if (data .vcc >= 2700 ) {
document.getElementById ("latest-vcc-icon" ).innerHTML = "🔋" ;
document.getElementById ("latest-vcc-data" ).innerHTML = ` ${ (data .vcc / 1000.0 ).toFixed (2 ).toString ().padStart (4 )} ` ;
document.getElementById ("latest-vcc-data" ).classList .remove ("red" );
document.getElementById ("latest-vcc-data" ).classList .remove ("yellow" );
document.getElementById ("latest-vcc-data" ).classList .remove ("green" );
} else if (data .vcc >= 2400 ) {
document.getElementById ("latest-vcc-icon" ).innerHTML = "🪫" ;
document.getElementById ("latest-vcc-data" ).innerHTML = ` ${ (data .vcc / 1000.0 ).toFixed (2 ).toString ().padStart (4 )} ` ;
document.getElementById ("latest-vcc-data" ).classList .remove ("red" );
document.getElementById ("latest-vcc-data" ).classList .add ("yellow" );
document.getElementById ("latest-vcc-data" ).classList .remove ("green" );
} else {
document.getElementById ("latest-vcc-icon" ).innerHTML = "🪫" ;
document.getElementById ("latest-vcc-data" ).innerHTML = ` ${ (data .vcc / 1000.0 ).toFixed (2 ).toString ().padStart (4 )} ` ;
document.getElementById ("latest-vcc-data" ).classList .add ("red" );
document.getElementById ("latest-vcc-data" ).classList .remove ("yellow" );
document.getElementById ("latest-vcc-data" ).classList .remove ("green" );
} ここでは、電源電圧が 2700mV 未満に降下した際に絵文字を 🔋 から 🪫 に変えているほか、3000mV → 2700mV → 2400mV と電圧降下に従って電圧値の文字色を適用する CSS クラスを入れ替えています。
イベントリスナーの登録 254-257行目では、スケッチからのイベントを受信した際の処理を登録しています。
source .addEventListener ("data_app_cue_twelite_cue_mode" , (e ) => {
console .log ("data_app_cue_twelite_cue_mode" , e .data );
processDataAppCueTweliteCueMode (JSON .parse (e .data ));
}, false ); ここでは、スケッチより 受信したイベントメッセージから JSON 文字列を取り出し、パースしたデータを先ほどの関数 processDataAppCueTweliteCueMode() へ渡しています。
関連情報 Arduino ESP32 コミュニティ ライブラリ プラグイン Web関連 ECMAScript (JavaScript) コミュニティ 3.5.2.2 - WebSocketによる中継 子機からのデータを WebSocket サーバに中継するサンプルスケッチ spot-router の解説
無線 LAN 子機として振る舞い、LAN 上の WebSocket サーバに受信したパケットデータ文字列を中継するサンプルスケッチ
spot-router の解説です。
3.5.2.2.1 - WebSocketによる中継 最新版
無線 LAN 子機として振る舞い、LAN 上の WebSocket サーバに受信したパケットデータ文字列を中継するサンプルスケッチ
spot-router の解説です。
本稿では、サードパーティのオープンソースソフトウェアを使用します。
サードパーティのソフトウェアについて、その詳しい使用方法を弊社からご案内することはいたしかねます。また、サードパーティのソフトウェアを使用されたことによるいかなる損害についても、弊社は一切の責任を負いません。
ソースコードの入手 GitHub (monowireless/spot-router ) から入手できます。
システムの概要 spot-router は、TWELITE 親機が受信したデータに基づき出力した文字列(App_Wings の ModBus ASCII 形式)を WebSocket サーバへ転送します。
spot-server が中継したデータを受け取るには、WebSocket サーバを立てる必要があります。
開発に必要なもの 環境整備 IDE とツールチェインの導入 Arduino IDE 1.x による開発環境の構築方法 をご覧ください。
または
Arduino IDE 2.x による開発環境の構築方法 をご覧ください。
ライブラリの導入 はじめに、Arduino のスケッチブックの保存場所(Arduino IDE 環境設定に記載。例:C:\Users\foo\Documents\Arduino) に libraries フォルダがない場合は、これを作成します。
WebSocket ライブラリ GitHub (Links2004/arduinoWebSockets) から Zip ファイルをダウンロードしますZip ファイルを展開し、libraries フォルダに arduinoWebSockets-<バージョン> フォルダを配置します プロジェクトファイルの入手 GitHub (monowireless/spot-router) から Zip ファイルをダウンロードしますZip ファイルを展開し、フォルダ名を spot-router-main から spot-router に変更します Arduino のスケッチブックの保存場所(Arduino IDE 環境設定に記載。例:C:\Users\foo\Documents\Arduino)に spot-router フォルダを配置します ユーザ設定の変更 Arduino IDE 上部のタブから config.h を開き、無線 LAN や WebSocket サーバに関する設定( 詳細 )を変更してください。
プロジェクトファイルの書き込み方法 ESP32 へのスケッチの書き込み方法 をご覧ください。
スケッチ Arduino スケッチ spot-router.ino の解説です。
ライブラリのインクルード Arduino および ESP32 公式ライブラリ 4-5行目では、Arduino および ESP32 の公式ライブラリをインクルードしています。
#include <Arduino.h>
#include <WiFi.h> ヘッダファイル 内容 備考 Arduino.hArduino の基本ライブラリ 省略できる場合もあるが念のため記載 WiFi.hESP32 の WiFi を使う
サードパーティのライブラリ 8行目では、サードパーティのライブラリをインクルードしています。
#include <WebSocketsClient.h> ヘッダファイル 内容 備考 WebSocketsClient.hWebSocket クライアントになる
MWings ライブラリ 11行目では、MWings ライブラリをインクルードしています。
ユーザ設定の定義 14行目では、config.h
config.h では、ユーザ設定を定義しています。実行時には、この設定を書き換えてください。
無線 LAN 設定の定義 config.h の4-5行目では、TWELITE SPOT に搭載された ESP32 に適用する無線 LAN 設定を定義しています。
const char * WIFI_SSID = "YOUR SSID" ; // Modify it
const char * WIFI_PASSWORD = "YOUR PASSWORD" ; // Modify it
名称 内容 WIFI_SSID接続するネットワークの SSID WIFI_PASSWORD接続するネットワークの パスワード
WebSocket 設定の定義 config.h の8-10行目では、WebSocket クライアントの設定を定義しています。
const char * WS_SERVER_IP = "YOUR ADDRESS" ; // Modify it
const int WS_SERVER_PORT = 8080 ;
const char * WS_SERVER_PATH = "/" ; 名称 内容 WS_SERVER_IP送信するサーバの IP アドレス WS_SERVER_PORT送信するサーバのポート番号 WS_SERVER_PATH送信するサーバの WebSocket サーバのパス
ピン番号の定義 17-21行目では、ピン番号を定義しています。
const uint8_t TWE_RST = 5 ;
const uint8_t TWE_PRG = 4 ;
const uint8_t LED = 18 ;
const uint8_t ESP_RXD1 = 16 ;
const uint8_t ESP_TXD1 = 17 ; 名称 内容 TWE_RSTTWELITE の RST ピンが接続されているピンの番号 TWE_PRGTWELITE の PRG ピンが接続されているピンの番号 LED基板上の ESP32 用 LED が接続されているピンの番号 ESP_RXD1TWELITE の TX ピンが接続されているピンの番号 ESP_TXD1TWELITE の RX ピンが接続されているピンの番号
TWELITE 設定の定義 24-27行目では、TWELITE SPOT に搭載された TWELITE 親機に適用する設定を定義しています。
const uint8_t TWE_CH = 18 ;
const uint32_t TWE_APPID = 0x67720102 ;
const uint8_t TWE_RETRY = 2 ;
const uint8_t TWE_POWER = 3 ; 名称 内容 TWE_CHTWELITE の 周波数チャネル TWE_APPIDTWELITE の アプリケーション ID TWE_RETRYTWELITE の 再送回数(送信時) TWE_POWERTWELITE の 送信出力
このサンプルでは、TWELITE 親機からのコマンド送信を行わないため、29-30行目の内容は関係ありません。
グローバルオブジェクトの宣言 30行目では、グローバルオブジェクトを宣言しています。
WebSocketsClient webSocket; 名称 内容 webSocketWebSocket クライアントのインタフェース
関数プロトタイプの宣言 33行目では、関数プロトタイプを宣言しています。
String createPacketStringFrom (const BarePacket& packet); 名称 内容 createPacketStringFrom()受信したパケットデータから書式文字列を再構築します
TWELITE の設定 42-47行目では、Twelite.begin()
Serial2.begin(115200 , SERIAL_8N1, ESP_RXD1, ESP_TXD1);
if (Twelite.begin(Serial2,
LED, TWE_RST, TWE_PRG,
TWE_CH, TWE_APPID, TWE_RETRY, TWE_POWER)) {
Serial.println("Started TWELITE." );
} 引数 型 内容 Serial2HardwareSerial&TWELITE との通信に使うシリアルポート LEDintステータス LED を接続したピンの番号 TWE_RSTintTWELITE の RST ピンを接続したピンの番号 TWE_PRGintTWELITE の PRG ピンを接続したピンの番号 TWE_CHANNELuint8_tTWELITE の 周波数チャネル TWE_APP_IDuint32_tTWELITE の アプリケーション ID TWE_RETRYuint8_tTWELITE の 再送回数(送信時) TWE_POWERuint8_tTWELITE の 送信出力
イベントハンドラの登録 49-54行目では、すべてのアプリの子機からのパケットを受信した際に行う処理を登録しています。
Twelite.on([](const BarePacket& packet) {
String packetStr = createPacketStringFrom(packet);
if (not(packetStr.length() <= 0 )) {
webSocket.sendTXT(packetStr.c_str());
}
}); ここでは、パケットデータから書式文字列(ModBus ASCII 形式)を再構成し、WebSocket サーバへ送信しています。
無線 LAN の設定 57-71行目では、無線 LAN の設定を行っています。
WiFi.mode(WIFI_STA);
WiFi.setAutoReconnect(true);
WiFi.begin(WIFI_SSID, WIFI_PASSWORD);
Serial.print("Connecting to WiFi .." );
while (WiFi.status() != WL_CONNECTED) {
static int count = 0 ;
Serial.print('.' );
delay(500 );
// Retry every 5 seconds
if (count++ % 10 == 0 ) {
WiFi.disconnect();
WiFi.reconnect();
Serial.print('!' );
}
} ここでは、無線 LAN 子機として設定したうえで、指定のネットワークへ接続しています。
ネットワークに接続できるまで、while 文を出ません。
WebSocket の設定 76-77行目では、WebSocket を設定しています。
webSocket.begin(WS_SERVER_IP, WS_SERVER_PORT, WS_SERVER_PATH);
webSocket.setReconnectInterval(5000 ); ここでは、WebSocket サーバと再接続間隔を指定しています。
また、78-97行目では、サーバとの接続が切断されたとき、サーバと接続したとき、そしてメッセージを受信したときのイベントを登録しています。
webSocket.onEvent([](WStype_t type, uint8_t * payload, size_t length) {
switch (type) {
case WStype_DISCONNECTED: {
Serial.println("Disconnected!" );
break ;
}
case WStype_CONNECTED: {
Serial.print("Connected to url: " );
Serial.println(reinterpret_cast < char *> (payload));
webSocket.sendTXT("This is TWELITE SPOT to ground control" );
break ;
}
case WStype_TEXT: {
Serial.print("Got text: " );
Serial.println(reinterpret_cast < char *> (payload));
break ;
}
default : break ;
}
}); なかでも、サーバと接続したときには、サーバへメッセージを送るようにしています。
webSocket.sendTXT("This is TWELITE SPOT to ground control" ); TWELITE のデータの更新 102行目では、Twelite.update()
Twelite.update() は、TWELITE 親機から送信されるパケットデータ(ModBus ASCII 形式)を順次1バイトずつ読み出す関数です。
loop() 内で繰り返し
Twelite.update() を呼ぶことで、TWELITE 親機から送信されるパケットデータの解釈が進みます。パケットデータの解釈を終えた際に
上記 のようなイベントが呼ばれる仕組みです。
delay() などの処理でこの関数の呼び出しをブロックすると、パケットデータ文字列の読み出しが間に合わないことがあります。時間のかかる処理は必ず非同期の実装として、
loop() 関数をできるだけ高速回転させるようにしてください。
WebSocket のデータの更新 103行目では、WebSocket のデータを更新する処理を呼び出しています。
Twelite.update() と同様に、
delay() などの処理でこの関数の呼び出しをブロックすると、データ更新が間に合わないことがあります。時間のかかる処理は必ず非同期の実装として、
loop() 関数をできるだけ高速回転させるようにしてください。
<付録> WebSocket サーバによる動作確認 extra/python-websocket-server/server.py は、Python スクリプトによって WebSocket サーバを立て、ESP32 からのパケットデータ文字列を表示するサンプルスクリプトです。このスクリプトを使うことで、スケッチの動作を確認できます。
# -*- coding: utf-8-unix -*-
# Python 3.11
import logging
from websocket_server import WebsocketServer
def new_client (client, server):
server. send_message_to_all("This is ground control to TWELITE SPOT" )
def new_message (client, server, message):
print("Received an message:" )
print(message)
server = WebsocketServer(host= "YOUR IP ADDRESS" , port= 8080 , loglevel= logging. INFO)
server. set_fn_new_client(new_client)
server. set_fn_message_received(new_message)
server. run_forever() coding 変数を指定しているのは、筆者の環境が Emacs だからです。おまじないではありません。
動作確認の手順 スクリプトの実行 依存モジュール をインストールしてから実行します。
pip3 install websocket-server
python3 server.py 実行すると、下記のようなメッセージが表示されます。
INFO:websocket_server.websocket_server:Listening on port 8080 for clients..
INFO:websocket_server.websocket_server:Starting WebsocketServer on main thread. クライアントの接続を確認 ESP32 が 無線 LAN への接続に成功すると、WebSocket サーバへの接続を試みます。
接続に成功すると、クライアント側のシリアルコンソールには下記のように出力されます。
Started TWELITE.
Connecting to WiFi .....
Connected. IP: xxx.xxx.xxx.xxx
Connected to url: /
Got text: This is ground control to TWELITE SPOT 一方で、サーバ側のターミナルには下記のように出力されます。
Received an message:
This is TWELITE SPOT to ground control 以降、TWELITE SPOT が子機からのパケットを受信すると、下記のようにサーバ側のターミナルへパケットデータ文字列が出力されます。
Received an message:
:80000000DE10098201BC8201800607003400038135001205350401000000113008020A8C1130010203AF0000000180050100020AC60102000211D7AF30
Received an message:
:80000000E4100A8201BC8201800607003400038135001205350401000000113008020A8C1130010203AC0000000180050100020AC40102000211DB0DCC 関連情報 TWELITE Arduino ESP32 コミュニティ ライブラリ プラグイン ネットワーク関連 WebSocket コミュニティ 3.5.2.3 - REST API の使用 子機からのデータを HTTP GET リクエストに利用するサンプルスケッチ spot-httpbin の解説
無線 LAN 子機として振る舞い、Web 上のモックサーバ httpbin.org へ受信したパケットのデータを送信するサンプルスケッチ
spot-httpbin の解説です。
3.5.2.3.1 - REST API の使用 最新版
無線 LAN 子機として振る舞い、Web 上のモックサーバ
httpbin.org へ受信したパケットのデータを送信するサンプルスケッチ
spot-httpbin の解説です。
本稿では、サードパーティのオープンソースソフトウェアを使用します。
サードパーティのソフトウェアについて、その詳しい使用方法を弊社からご案内することはいたしかねます。また、サードパーティのソフトウェアを使用されたことによるいかなる損害についても、弊社は一切の責任を負いません。
ソースコードの入手 GitHub リポジトリ monowireless/spot-httpbin から入手できます。
システムの概要 spot-httpbin は、TWELITE 親機が受信したデータの一部と NTP による現在時刻を HTTP GET リクエストとしてモックサーバへ送信し、そのレスポンスをシリアルモニタへ表示します。
このサンプルでは例として子機に TWELITE ARIA を使用しますが、HTTP リクエストの使用方法には関係しません。
開発に必要なもの 環境整備 IDE とツールチェインの導入 Arduino IDE 1.x による開発環境の構築方法 をご覧ください。
または
Arduino IDE 2.x による開発環境の構築方法 をご覧ください。
ライブラリの導入 このサンプルでは、依存するライブラリをはじめから同梱しています。
スケッチと同じ階層の src フォルダの内容は IDE に表示されませんが、再帰的にビルドされます。
プロジェクトファイルの入手 GitHub (monowireless/spot-httpbin) から Zip ファイルをダウンロードしますZip ファイルを展開し、フォルダ名を spot-httpbin-main から spot-httpbin に変更します Arduino のスケッチブックの保存場所(Arduino IDE 環境設定に記載。例:C:\Users\foo\Documents\Arduino)に spot-httpbin フォルダを配置します ユーザ設定の変更 Arduino IDE 上部のタブから config.h を開き、Wi-Fi の SSID と パスワードを設定してください。WPA2-PSK ネットワークを想定しています。また、ルート証明書も登録してください。ルート証明書は、Chrome などのウェブブラウザの各ページに対するセキュリティ画面から入手できます。
ルート証明書(拡張子.cer)は、下記のような形式のテキストファイルです。
-----BEGIN CERTIFICATE-----
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
-----END CERTIFICATE----- プロジェクトファイルの書き込み ESP32 へのスケッチの書き込み方法 をご覧ください。
スケッチ Arduino スケッチ spot-httpbin.inoconfig.h
ライブラリのインクルード Arduino および ESP32 公式ライブラリ 4-6行目では、Arduino および ESP32 の公式ライブラリをインクルードしています。
#include <Arduino.h>
#include <WiFiClientSecure.h>
#include <WiFiUdp.h> ヘッダファイル 内容 備考 Arduino.hArduino の基本ライブラリ 省略できる場合もあるが念のため記載 WiFiClientSecure.hESP32 で SSL通信を行う WiFiUdp.hUDP 通信を行う NTP に必要
サードパーティのライブラリ 9-10行目では、同梱されたサードパーティのライブラリをインクルードしています。
#include "src/NTPClient/NTPClient.h"
#include "src/Time/TimeLib.h" ヘッダファイル 内容 備考 NTPClient.hNTP サーバへアクセスする TimeLib.hエポック時間を変換する
MWings ライブラリ 13行目では、MWings ライブラリをインクルードしています。
ユーザ設定の定義 16行目では、config.h
config.h では、ユーザ設定を定義しています。実行時には、この設定を書き換えてください。
データ型の定義 19-26行目では、子機から受信したデータを保管しておく構造体の型を定義しています。
struct DataFromAria {
uint32_t serialId;
uint8_t logicalId;
uint16_t supplyVoltage;
uint8_t linkQuality;
int16_t temp100x;
uint16_t humid100x;
}; 名称 内容 serialIdシリアルID logicalId論理デバイスID supplyVoltage電源電圧 linkQualityLQI temp100x100倍された温度 humid100x100倍された湿度
ここでは、TWELITE ARIA を使用します。
config.h再起動間隔の定義 config.h の4行目では、ESP32 の再起動間隔を指定しています。
const uint32_t REBOOT_INTERVAL = 21600 ; // seconds
ここでは、21600秒=6時間としています。
長期間の運用では、メモリリークが累積して不具合を起こしてしまう場合があります。
そこで Wi-Fi ルータのように定期的な再起動を行うようにしています。
TWELITE 設定の定義 config.h の7-8行目では、TWELITE SPOT に搭載された TWELITE 親機に適用する設定を定義しています。
const uint8_t TWE_CH = 18 ;
const uint32_t TWE_APPID = 0x67720102 ; 名称 内容 TWE_CHTWELITE の 周波数チャネル TWE_APPIDTWELITE の アプリケーション ID
Wi-Fi 設定の定義 config.h の11-12行目では、TWELITE SPOT に搭載された ESP32 に適用するWi-Fi 設定を定義しています。
const char * WIFI_SSID = "YOUR SSID" ;
const char * WIFI_PASSWORD = "YOUR PASSWORD" ; 名称 内容 WIFI_SSID接続するネットワークの SSID WIFI_PASSWORD接続するネットワークの パスワード
ルート証明書 config.h の14-16行目では、ルート証明書の内容を記述するためのテンプレートを用意しています。
const char * CA_CERT =
"-----BEGIN CERTIFICATE----- \n "
"-----END CERTIFICATE----- \n " ; ルート証明書は、Chrome などのウェブブラウザの各ページに対するセキュリティ画面から入手してください。
すべての行をダブルクォートで囲い、末尾のダブルクォートの前には改行文字 \n を追加する必要があります。
ホストの設定 config.h の18-19行目では、ホストの設定を定義しています。
const char * SERVER_HOST = "www.httpbin.org" ;
const uint16_t SERVER_PORT = 443 ; 名称 内容 SERVER_HOSTサーバのホスト名 SERVER_PORTサーバのポート番号
各種定数の定義 config.h の21行目からは、各種定数を定義しています。
const uint32_t NTP_UPDATE_INTERVAL = 10000 ; // ms
const int QUERIES_MAX_LENGTH = 128 ; // bytes (without \0)
const int32_t CONNECT_TIMEOUT = 10 ; // seconds
const uint32_t RECONNECT_MIN_INTERVAL = 5 ; // seconds
// SEND_MIN_INTERVAL must be longer than NTP_UPDATE_INTERVAL
const uint32_t SEND_MIN_INTERVAL = 10 ; // seconds
const uint32_t REQUEST_TIMEOUT = 10 ; // seconds
名称 内容 NTP_UPDATE_INTERVALNTP時刻の取得間隔 QUERIES_MAX_LENGTHクエリ文字列の最大長(ヌル文字含まず) CONNECT_TIMEOUTサーバへの接続時のタイムアウト RECONNECT_MIN_INTERVALWi-Fiアクセスポイントへ再接続する際の最短間隔 SEND_MIN_INTERVALリクエスト間隔の最短間隔 REQUEST_TIMEOUTリクエストからレスポンスまでのタイムアウト
SEND_MIN_INTERVAL は、NTP_UPDATE_INTERVAL 以上に設定しています。
リクエスト間隔が短いと、リクエスト間でタイムスタンプが重複してしまう可能性があるからです。
SEND_MIN_INTERVAL を短くすると、連続してパケットを受信した場合にサーバへ負担をかけてしまいます。
必ず適度な間隔を空けてください。
ピン番号の定義 29-34行目では、ピン番号を定義しています。
static const int RST_PIN = 5 ;
static const int PRG_PIN = 4 ;
static const int LED_PIN = 18 ;
static const int8_t RX1_PIN = 16 ;
static const int8_t TX1_PIN = 17 ; 名称 内容 RST_PINTWELITE の RST ピンが接続されているピンの番号 PRG_PINTWELITE の PRG ピンが接続されているピンの番号 LED_PIN基板上の ESP32 用 LED が接続されているピンの番号 RX1_PINTWELITE の RX1 ピンが接続されているピンの番号 TX1_PINTWELITE の TX1 ピンが接続されているピンの番号
グローバルオブジェクトの宣言 37-40行目では、グローバルオブジェクトを宣言しています。
static WiFiClientSecure client;
static WiFiUDP ntpUDP;
static NTPClient timeClient (ntpUDP, "ntp.nict.jp" ,
32400 , NTP_UPDATE_INTERVAL); // JST(UTC+9)
名称 内容 clientHTTPS通信のインタフェース ntpUDPNTP用のUDP通信のインタフェース timeClientNTPのインタフェース
グローバル変数の宣言 43-44行目では、グローバル変数を宣言しています。
static DataFromAria LatestDataFromAria;
static bool IsThereNewDataFromAria; 名称 内容 LatestDataFromAriaTWELITE ARIA から受信した最新のデータ IsThereNewDataFromAriaTWELITE ARIA から新たなデータを受信したことを示すフラグ
関数プロトタイプの宣言 47-59行目では、関数プロトタイプを宣言しています。
void anotherLoopForTWELITE ();
void anotherLoopForNTP (); 名称 内容 anotherLoopForTWELITETWELITEのデータを処理するためのループ関数 anotherLoopForNTPNTPで時刻を取得するためのループ関数
void initTWELITE ();
void initWiFi ();
void initNTP (); 名称 内容 initTWELITETWELITEの初期化関数 initWiFiWi-Fiの初期化関数 initNTPNTPの初期化関数
void onAppAriaPacket (const ParsedAppAriaPacket& packet); 名称 内容 onAppAriaPacketTWELITE ARIA からデータを受信した際のコールバック関数
void sendAriaData(const DataFromAria& data) 名称 内容 sendAriaDataTWELITE ARIAのデータを HTTP GET リクエストにのせて送る関数
setup()62-90行目では、全体の初期化を行います。
void setup () {
Serial.begin(115200 );
initTWELITE();
initWiFi();
initNTP();
// Attach another loop function for TWELITE
// Note: Core 0 is also used for the WiFi task, which priority is 19 (ESP_TASKD_EVENT_PRIO - 1)
[](void * params) {
while (true) {
anotherLoopForTWELITE();
vTaskDelay(1 ); // IMPORTANT for Watchdog
},
"Task for anotherLoopForTWELITE()" , 8192 , nullptr , 18 , nullptr ,
0 ); // Priority is 18 (lower than WiFi)
// Attach another loop function for NTP
[](void * params) {
while (true) {
anotherLoopForNTP();
vTaskDelay(1 ); // IMPORTANT for Watchdog
},
"Task for anotherLoopForNTP()" , 8192 , nullptr , 17 , nullptr ,
0 ); // Priority is 17 (lower than WiFi and TWELITE)
xTaskCreatePinnedToCore()loop() とは別のタスクを登録しています。
下記の部分はキャプチャのない無名関数です。不要なグローバル空間の汚染を避けることができます。
[](void * params) {
while (true) {
anotherLoopForTWELITE();
vTaskDelay(1 ); // IMPORTANT for Watchdog
},
ウォッチドッグタイマへ介入する余地を設けるために、vTaskDelay() を挿入しています。
loop()93-114行目は、主となるループ処理です。
HTTP リクエストの処理、Wi-Fi 切断時の再接続処理、定期リセットの処理を行います。
void loop () {
static uint32_t lastTimeReconnected = 0 ;
if (WiFi.status() == WL_CONNECTED) {
// Regular operations
// Check for new data
if (IsThereNewDataFromAria) {
IsThereNewDataFromAria = false; // Clear first; data is updated on another thread
= LatestDataFromAria; // Now, the buffer is open for incoming data
}
} else if (millis() - lastTimeReconnected > RECONNECT_MIN_INTERVAL * 1000 ) {
// Lost connection, reconnect periodically
"Disconnected. Reconnecting to WiFi..." );
WiFi.begin(WIFI_SSID, WIFI_PASSWORD);
lastTimeReconnected = millis();
}
// Reboot every x interval
if (millis() > REBOOT_INTERVAL * 1000 ) {
Serial.println("Rebooting..." );
ESP.restart();
}
} anotherLoopForTWELITE()117-119行目は、TWELITE のためのループ処理です。
データの受信と解釈を逐次行うため、ブロッキング処理を含む loop() とは別のタスクとしています。
void anotherLoopForTWELITE () {
Twelite.update();
} anotherLoopForNTP()120-123行目は、NTP のためのループ処理です。
こちらについても UDP の通信を行うため、ブロッキング処理を含む loop() とは別のタスクとしています。
void anotherLoopForNTP () {
timeClient.update();
setTime(timeClient.getEpochTime());
} initTWELITE()126-133行目は、TWELITE の初期化処理です。
TWELITE SPOT に搭載された TWELITE を指定された設定で起動し、パケット受信時のコールバック関数を登録しています。
void initTWELITE () {
Serial2.begin(115200 );
if (Twelite.begin(Serial2, LED_PIN, RST_PIN, PRG_PIN, TWE_CHANNEL, TWE_APP_ID)) {
Serial.println("Started TWELITE." );
}
// Attach event handlers to process packets
} initWiFi()136-160行目は、Wi-Fi の初期化処理です。
接続されない場合は、5秒置きに再接続を試みます。
void initWiFi () {
Serial.print(" \n Connecting to the WiFi network " );
Serial.print(WIFI_SSID);
Serial.println("..." );
// Begin
WiFi.setAutoReconnect(true);
WiFi.begin(WIFI_SSID, WIFI_PASSWORD);
// Wait for connection
"Connecting." );
while (WiFi.status() != WL_CONNECTED) x
static int count = 0 ;
Serial.print('.' );
delay(500 );
// Retry every 5 seconds
if (count++ % 10 == 0 ) {
WiFi.disconnect();
WiFi.reconnect();
Serial.print('!' );
}
}
Serial.println(" \n Connected!" );
// Set Root CA certificate
} initNTP()163-167行目は、NTP の初期化処理です。
void initNTP () {
timeClient.begin();
timeClient.update();
setTime(timeClient.getEpochTime());
} onAppAriaPacket()170-180行目には、TWELITE ARIA からデータを受信した際の処理を記述しています。
ここでは HTTP の送信処理を行わず、グローバル変数へセットしています。
グローバル変数へセットしたデータは、別のタスクで sendAriaData() によって処理します。
void onAppAriaPacket (const ParsedAppAriaPacket& packet)
{
// Store data
= packet.u32SourceSerialId;
LatestDataFromAria.logicalId = packet.u8SourceLogicalId;
LatestDataFromAria.supplyVoltage = packet.u16SupplyVoltage;
LatestDataFromAria.linkQuality = packet.u8Lqi;
LatestDataFromAria.temp100x = packet.i16Temp100x;
LatestDataFromAria.humid100x = packet.u16Humid100x;
IsThereNewDataFromAria = true;
} sendAriaData()183-240行目は、TWELITE ARIA のデータを HTTP GET リクエストのクエリ文字列にセットして送信する関数です。
コードを簡潔とするために、HTTP GET を使用しています。
HTTP POST を使用する場合は、リクエストボディを追加してください。
サーバへの過度な負荷を防ぐため、高頻度でパケットが到着した際には送信をスキップしています。
void sendAriaData (const DataFromAria& data)
{
static uint32_t lastTimeRequested = 0 ;
if (millis() - lastTimeRequested > SEND_MIN_INTERVAL * 1000 or lastTimeRequested == 0 ) {
Serial.println("Connecting to the server..." );
if (not client.connect(SERVER_HOST, SERVER_PORT, CONNECT_TIMEOUT * 1000 )) {
Serial.println("Connection failed!" );
} else {
Serial.println("Connected to the server!" );
// Make a query string
char queries[QUERIES_MAX_LENGTH+ 1 ];
snprintf(queries, sizeof (queries),
"datetime=%04d%02d%02d%02d%02d%02d&sid=%X&lid=%d&temp=%d&humid=%d&bat=%d&lqi=%d" ,
// Note that NTP_UPDATE_INTERVAL is set for 10000ms by default; second() delays up to 10s.
// To prevent duplication of datetime, SEND_MIN_INTERVAL is set for 10s.
data.serialId,
data.logicalId,
data.temp100x,
data.humid100x,
data.supplyVoltage,
data.linkQuality);
// Send a request
"GET https://" ) +
SERVER_HOST +
String("/get?" ) +
queries +
String(" HTTP/1.1" ));
client.println("Accept: */*" );
client.println(String("Host: " ) + SERVER_HOST);
client.println("Connection: close" );
client.println();
uint32_t timeSentRequest = millis();
// Handle a response
while (client.connected()) {
String line = client.readStringUntil('\n' );
if (line == " \r " ) {
Serial.println("Headers received" );
break ;
}
if (millis() - timeSentRequest > REQUEST_TIMEOUT * 1000 ) {
Serial.println("Request was timed out" );
break ;
}
}
while (client.available()) {
char c = client.read();
Serial.write(c);
}
client.stop();
}
lastTimeRequested = millis();
} else {
Serial.println("Requests are too frequently; skip." );
}
} 3.5.2.3.2 - REST API の使用 mwings-v1.1.3
無線 LAN 子機として振る舞い、Web 上のモックサーバ
httpbin.org へ受信したパケットのデータを送信するサンプルスケッチ
spot-httpbin の解説です。
本稿では、サードパーティのオープンソースソフトウェアを使用します。
サードパーティのソフトウェアについて、その詳しい使用方法を弊社からご案内することはいたしかねます。また、サードパーティのソフトウェアを使用されたことによるいかなる損害についても、弊社は一切の責任を負いません。
ソースコードの入手 GitHub リポジトリ monowireless/spot-httpbin から入手できます。
システムの概要 spot-httpbin は、TWELITE 親機が受信したデータの一部と NTP による現在時刻を HTTP GET リクエストとしてモックサーバへ送信し、そのレスポンスをシリアルモニタへ表示します。
このサンプルでは例として子機に TWELITE ARIA を使用しますが、HTTP リクエストの使用方法には関係ありません。
開発に必要なもの 環境整備 IDE とツールチェインの導入 Arduino IDE 1.x による開発環境の構築方法 をご覧ください。
ライブラリの導入 このサンプルでは、依存するライブラリをはじめから同梱しています。
スケッチと同じ階層の src フォルダの内容は IDE に表示されませんが、再帰的にビルドされます。
プロジェクトファイルの入手 GitHub (monowireless/spot-httpbin) から Zip ファイルをダウンロードしますZip ファイルを展開し、フォルダ名を spot-httpbin-main から spot-httpbin に変更します Arduino のスケッチブックの保存場所(Arduino IDE 環境設定に記載。例:C:\Users\foo\Documents\Arduino)に spot-httpbin フォルダを配置します ユーザ設定の変更 Arduino IDE 上部のタブから config.h を開き、Wi-Fi の SSID と パスワードを設定してください。WPA2-PSK ネットワークを想定しています。また、ルート証明書も登録してください。ルート証明書は、Chrome などのウェブブラウザの各ページに対するセキュリティ画面から入手できます。
ルート証明書(拡張子.cer)は、下記のような形式のテキストファイルです。
-----BEGIN CERTIFICATE-----
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
-----END CERTIFICATE----- プロジェクトファイルの書き込み方法 ESP32 へのスケッチの書き込み方法 をご覧ください。
スケッチ Arduino スケッチ spot-httpbin.inoconfig.h
ライブラリのインクルード Arduino および ESP32 公式ライブラリ 4-6行目では、Arduino および ESP32 の公式ライブラリをインクルードしています。
#include <Arduino.h>
#include <WiFiClientSecure.h>
#include <WiFiUdp.h> ヘッダファイル 内容 備考 Arduino.hArduino の基本ライブラリ 省略できる場合もあるが念のため記載 WiFiClientSecure.hESP32 で SSL通信を行う WiFiUdp.hUDP 通信を行う NTP に必要
サードパーティのライブラリ 9-10行目では、同梱されたサードパーティのライブラリをインクルードしています。
#include "src/NTPClient/NTPClient.h"
#include "src/Time/TimeLib.h" ヘッダファイル 内容 備考 NTPClient.hNTP サーバへアクセスする TimeLib.hエポック時間を変換する
MWings ライブラリ 13行目では、MWings ライブラリをインクルードしています。
ユーザ設定の定義 16行目では、config.h
config.h では、ユーザ設定を定義しています。実行時には、この設定を書き換えてください。
データ型の定義 19-26行目では、子機から受信したデータを保管しておく構造体の型を定義しています。
struct DataFromAria {
uint32_t serialId;
uint8_t logicalId;
uint16_t supplyVoltage;
uint8_t linkQuality;
int16_t temp100x;
uint16_t humid100x;
}; 名称 内容 serialIdシリアルID logicalId論理デバイスID supplyVoltage電源電圧 linkQualityLQI temp100x100倍された温度 humid100x100倍された湿度
ここでは、TWELITE ARIA を使用します。
config.h再起動間隔の定義 config.h の4行目では、ESP32 の再起動間隔を指定しています。
const uint32_t REBOOT_INTERVAL = 21600 ; // seconds
ここでは、21600秒=6時間としています。
長期間の運用では、メモリリークが累積して不具合を起こしてしまう場合があります。
そこで Wi-Fi ルータのように定期的な再起動を行うようにしています。
TWELITE 設定の定義 config.h の7-8行目では、TWELITE SPOT に搭載された TWELITE 親機に適用する設定を定義しています。
const uint8_t TWE_CH = 18 ;
const uint32_t TWE_APPID = 0x67720102 ; 名称 内容 TWE_CHTWELITE の 周波数チャネル TWE_APPIDTWELITE の アプリケーション ID
Wi-Fi 設定の定義 config.h の11-12行目では、TWELITE SPOT に搭載された ESP32 に適用するWi-Fi 設定を定義しています。
const char * WIFI_SSID = "YOUR SSID" ;
const char * WIFI_PASSWORD = "YOUR PASSWORD" ; 名称 内容 WIFI_SSID接続するネットワークの SSID WIFI_PASSWORD接続するネットワークの パスワード
ルート証明書 config.h の14-16行目では、ルート証明書の内容を記述するためのテンプレートを用意しています。
const char * CA_CERT =
"-----BEGIN CERTIFICATE----- \n "
"-----END CERTIFICATE----- \n " ; ルート証明書は、Chrome などのウェブブラウザの各ページに対するセキュリティ画面から入手してください。
すべての行をダブルクォートで囲い、末尾のダブルクォートの前には改行文字 \n を追加する必要があります。
ホストの設定 config.h の18-19行目では、ホストの設定を定義しています。
const char * SERVER_HOST = "www.httpbin.org" ;
const uint16_t SERVER_PORT = 443 ; 名称 内容 SERVER_HOSTサーバのホスト名 SERVER_PORTサーバのポート番号
各種定数の定義 config.h の21行目からは、各種定数を定義しています。
const uint32_t NTP_UPDATE_INTERVAL = 10000 ; // ms
const int QUERIES_MAX_LENGTH = 128 ; // bytes (without \0)
const int32_t CONNECT_TIMEOUT = 10 ; // seconds
const uint32_t RECONNECT_MIN_INTERVAL = 5 ; // seconds
// SEND_MIN_INTERVAL must be longer than NTP_UPDATE_INTERVAL
const uint32_t SEND_MIN_INTERVAL = 10 ; // seconds
const uint32_t REQUEST_TIMEOUT = 10 ; // seconds
名称 内容 NTP_UPDATE_INTERVALNTP時刻の取得間隔 QUERIES_MAX_LENGTHクエリ文字列の最大長(ヌル文字含まず) CONNECT_TIMEOUTサーバへの接続時のタイムアウト RECONNECT_MIN_INTERVALWi-Fiアクセスポイントへ再接続する際の最短間隔 SEND_MIN_INTERVALリクエスト間隔の最短間隔 REQUEST_TIMEOUTリクエストからレスポンスまでのタイムアウト
SEND_MIN_INTERVAL は、NTP_UPDATE_INTERVAL 以上に設定しています。
リクエスト間隔が短いと、リクエスト間でタイムスタンプが重複してしまう可能性があるからです。
SEND_MIN_INTERVAL を短くすると、連続してパケットを受信した場合にサーバへ負担をかけてしまいます。
必ず適度な間隔を空けてください。
ピン番号の定義 29-31行目では、ピン番号を定義しています。
static const int RST_PIN = 5 ;
static const int PRG_PIN = 4 ;
static const int LED_PIN = 18 ; 名称 内容 RST_PINTWELITE の RST ピンが接続されているピンの番号 PRG_PINTWELITE の PRG ピンが接続されているピンの番号 LED_PIN基板上の ESP32 用 LED が接続されているピンの番号
グローバルオブジェクトの宣言 34-37行目では、グローバルオブジェクトを宣言しています。
static WiFiClientSecure client;
static WiFiUDP ntpUDP;
static NTPClient timeClient (ntpUDP, "ntp.nict.jp" ,
32400 , NTP_UPDATE_INTERVAL); // JST(UTC+9)
名称 内容 clientHTTPS通信のインタフェース ntpUDPNTP用のUDP通信のインタフェース timeClientNTPのインタフェース
グローバル変数の宣言 40-41行目では、グローバル変数を宣言しています。
static DataFromAria LatestDataFromAria;
static bool IsThereNewDataFromAria; 名称 内容 LatestDataFromAriaTWELITE ARIA から受信した最新のデータ IsThereNewDataFromAriaTWELITE ARIA から新たなデータを受信したことを示すフラグ
関数プロトタイプの宣言 44-56行目では、関数プロトタイプを宣言しています。
void anotherLoopForTWELITE ();
void anotherLoopForNTP (); 名称 内容 anotherLoopForTWELITETWELITEのデータを処理するためのループ関数 anotherLoopForNTPNTPで時刻を取得するためのループ関数
void initTWELITE ();
void initWiFi ();
void initNTP (); 名称 内容 initTWELITETWELITEの初期化関数 initWiFiWi-Fiの初期化関数 initNTPNTPの初期化関数
void onAppAriaPacket (const ParsedAppAriaPacket& packet); 名称 内容 onAppAriaPacketTWELITE ARIA からデータを受信した際のコールバック関数
void sendAriaData(const DataFromAria& data) 名称 内容 sendAriaDataTWELITE ARIAのデータを HTTP GET リクエストにのせて送る関数
setup()59-87行目では、全体の初期化を行います。
void setup () {
Serial.begin(115200 );
initTWELITE();
initWiFi();
initNTP();
// Attach another loop function for TWELITE
// Note: Core 0 is also used for the WiFi task, which priority is 19 (ESP_TASKD_EVENT_PRIO - 1)
[](void * params) {
while (true) {
anotherLoopForTWELITE();
vTaskDelay(1 ); // IMPORTANT for Watchdog
},
"Task for anotherLoopForTWELITE()" , 8192 , nullptr , 18 , nullptr ,
0 ); // Priority is 18 (lower than WiFi)
// Attach another loop function for NTP
[](void * params) {
while (true) {
anotherLoopForNTP();
vTaskDelay(1 ); // IMPORTANT for Watchdog
},
"Task for anotherLoopForNTP()" , 8192 , nullptr , 17 , nullptr ,
0 ); // Priority is 17 (lower than WiFi and TWELITE)
xTaskCreatePinnedToCore()loop() とは別のタスクを登録しています。
下記の部分はキャプチャのない無名関数です。不要なグローバル空間の汚染を避けることができます。
[](void * params) {
while (true) {
anotherLoopForTWELITE();
vTaskDelay(1 ); // IMPORTANT for Watchdog
},
ウォッチドッグタイマへ介入する余地を設けるために、vTaskDelay() を挿入しています。
loop()90-111行目は、主となるループ処理です。
HTTP リクエストの処理、Wi-Fi 切断時の再接続処理、定期リセットの処理を行います。
void loop () {
static uint32_t lastTimeReconnected = 0 ;
if (WiFi.status() == WL_CONNECTED) {
// Regular operations
// Check for new data
if (IsThereNewDataFromAria) {
IsThereNewDataFromAria = false; // Clear first; data is updated on another thread
= LatestDataFromAria; // Now, the buffer is open for incoming data
}
} else if (millis() - lastTimeReconnected > RECONNECT_MIN_INTERVAL * 1000 ) {
// Lost connection, reconnect periodically
"Disconnected. Reconnecting to WiFi..." );
WiFi.begin(WIFI_SSID, WIFI_PASSWORD);
lastTimeReconnected = millis();
}
// Reboot every x interval
if (millis() > REBOOT_INTERVAL * 1000 ) {
Serial.println("Rebooting..." );
ESP.restart();
}
} anotherLoopForTWELITE()114-116行目は、TWELITE のためのループ処理です。
データの受信と解釈を逐次行うため、ブロッキング処理を含む loop() とは別のタスクとしています。
void anotherLoopForTWELITE () {
Twelite.update();
} anotherLoopForNTP()117-120行目は、NTP のためのループ処理です。
こちらについても UDP の通信を行うため、ブロッキング処理を含む loop() とは別のタスクとしています。
void anotherLoopForNTP () {
timeClient.update();
setTime(timeClient.getEpochTime());
} initTWELITE()123-130行目は、TWELITE の初期化処理です。
TWELITE SPOT に搭載された TWELITE を指定された設定で起動し、パケット受信時のコールバック関数を登録しています。
void initTWELITE () {
Serial2.begin(115200 );
if (Twelite.begin(Serial2, LED_PIN, RST_PIN, PRG_PIN, TWE_CHANNEL, TWE_APP_ID)) {
Serial.println("Started TWELITE." );
}
// Attach event handlers to process packets
} initWiFi()133-157行目は、Wi-Fi の初期化処理です。
接続されない場合は、5秒置きに再接続を試みます。
void initWiFi () {
Serial.print(" \n Connecting to the WiFi network " );
Serial.print(WIFI_SSID);
Serial.println("..." );
// Begin
WiFi.setAutoReconnect(true);
WiFi.begin(WIFI_SSID, WIFI_PASSWORD);
// Wait for connection
"Connecting." );
while (WiFi.status() != WL_CONNECTED) x
static int count = 0 ;
Serial.print('.' );
delay(500 );
// Retry every 5 seconds
if (count++ % 10 == 0 ) {
WiFi.disconnect();
WiFi.reconnect();
Serial.print('!' );
}
}
Serial.println(" \n Connected!" );
// Set Root CA certificate
} initNTP()160-164行目は、NTP の初期化処理です。
void initNTP () {
timeClient.begin();
timeClient.update();
setTime(timeClient.getEpochTime());
} onAppAriaPacket()167-177行目には、TWELITE ARIA からデータを受信した際の処理を記述しています。
ここでは HTTP の送信処理を行わず、グローバル変数へセットしています。
グローバル変数へセットしたデータは、別のタスクで sendAriaData() によって処理します。
void onAppAriaPacket (const ParsedAppAriaPacket& packet)
{
// Store data
= packet.u32SourceSerialId;
LatestDataFromAria.logicalId = packet.u8SourceLogicalId;
LatestDataFromAria.supplyVoltage = packet.u16SupplyVoltage;
LatestDataFromAria.linkQuality = packet.u8Lqi;
LatestDataFromAria.temp100x = packet.i16Temp100x;
LatestDataFromAria.humid100x = packet.u16Humid100x;
IsThereNewDataFromAria = true;
} sendAriaData()180-237行目は、TWELITE ARIA のデータを HTTP GET リクエストのクエリ文字列にセットして送信する関数です。
コードを簡潔とするために、HTTP GET を使用しています。
HTTP POST を使用される場合は、リクエストボディを追加してください。
サーバへの過度な負荷を防ぐため、高頻度でパケットが到着した際には送信をスキップしています。
void sendAriaData (const DataFromAria& data)
{
static uint32_t lastTimeRequested = 0 ;
if (millis() - lastTimeRequested > SEND_MIN_INTERVAL * 1000 or lastTimeRequested == 0 ) {
Serial.println("Connecting to the server..." );
if (not client.connect(SERVER_HOST, SERVER_PORT, CONNECT_TIMEOUT * 1000 )) {
Serial.println("Connection failed!" );
} else {
Serial.println("Connected to the server!" );
// Make a query string
char queries[QUERIES_MAX_LENGTH+ 1 ];
snprintf(queries, sizeof (queries),
"datetime=%04d%02d%02d%02d%02d%02d&sid=%X&lid=%d&temp=%d&humid=%d&bat=%d&lqi=%d" ,
// Note that NTP_UPDATE_INTERVAL is set for 10000ms by default; second() delays up to 10s.
// To prevent duplication of datetime, SEND_MIN_INTERVAL is set for 10s.
data.serialId,
data.logicalId,
data.temp100x,
data.humid100x,
data.supplyVoltage,
data.linkQuality);
// Send a request
"GET https://" ) +
SERVER_HOST +
String("/get?" ) +
queries +
String(" HTTP/1.1" ));
client.println("Accept: */*" );
client.println(String("Host: " ) + SERVER_HOST);
client.println("Connection: close" );
client.println();
uint32_t timeSentRequest = millis();
// Handle a response
while (client.connected()) {
String line = client.readStringUntil('\n' );
if (line == " \r " ) {
Serial.println("Headers received" );
break ;
}
if (millis() - timeSentRequest > REQUEST_TIMEOUT * 1000 ) {
Serial.println("Request was timed out" );
break ;
}
}
while (client.available()) {
char c = client.read();
Serial.write(c);
}
client.stop();
}
lastTimeRequested = millis();
} else {
Serial.println("Requests are too frequently; skip." );
}
} 3.5.2.4 - Google スプレッドシートの利用 TWELITE ARIA からのデータを Google スプレッドシートへアップロードするサンプルスケッチ spot-google-sheets の解説
無線 LAN 子機として振る舞い、クラウド上の Google スプレッドシートに TWELITE ARIA から受信したデータをアップロードするサンプルスケッチ
spot-google-sheets の解説です。
3.5.2.4.1 - Google スプレッドシートの利用 TWELITE ARIA からのデータを Google スプレッドシートへアップロードするサンプルスケッチ spot-google-sheets の解説
無線 LAN 子機として振る舞い、クラウド上の Google スプレッドシートに TWELITE ARIA から受信したデータをアップロードするサンプルスケッチ
spot-google-sheets の解説です。なお、このスケッチでは ESP32 の Arduino 環境から FreeRTOS の機能を利用しています。
本稿では、サードパーティのオープンソースソフトウェアを使用します。
サードパーティのソフトウェアについて、その詳しい使用方法を弊社からご案内することはいたしかねます。また、サードパーティのソフトウェアを使用されたことによるいかなる損害についても、弊社は一切の責任を負いません。
ソースコードの入手 GitHub (monowireless/spot-google-sheets ) から入手できます。
システムの概要 TWELITE SPOT は、事前に作成したサービスアカウントを使って自動的にスプレッドシートを作成し、指定したユーザアカウントへ、そのファイルを共有します。
ユーザアカウントへログインすると、Google ドライブの「共有アイテム」ページから、TWELITE SPOT によって作成されたスプレッドシートを閲覧・編集できます。
作成されるスプレッドシートのイメージ
TWELITE SPOT は、作成したスプレッドシートへデータ行を次々と追加していきます。
2023年5月現在、Google Sheets / Drive API の利用に追加料金はかかりません。
ただし、クエリの数などを定めた使用量上限(Sheets API / Drive API )があります。
例えば Google Sheets API では、リクエストを毎分60回以内に押さえなくてはなりません。超過したリクエストはエラーとなります。
サービスアカウントは、アプリケーションが使用するための Google アカウントです。
詳しくは Google による解説 をご覧ください。
開発に必要なもの
本稿では TWELITE ARIA を使用しますが、ソースコードを改変することで TWELITE CUE などの子機にも対応できます。
ただし、シートへ書き込むデータが増える場合は、API の 使用量上限 に気を配る必要があります。
環境整備 IDE とツールチェインの導入 Arduino IDE 1.x による開発環境の構築方法 をご覧ください。
または
Arduino IDE 2.x による開発環境の構築方法 をご覧ください。
ライブラリの導入 ESP-Google-Sheet-Client ライブラリ ライブラリマネージャを開き、検索ボックスに esp-google-sheet と入力してインストールします。
なお、GitHub (mobizt/ESP-Google-Sheet-Client) からも入手できます。
公式 NTP ライブラリ ライブラリマネージャを開き、検索ボックスに ntpclient と入力してインストールします。
TimeLib ライブラリ ライブラリマネージャを開き、検索ボックスに timelib と入力してインストールします。
事前準備:API のセットアップ 事前に、API を使用できるように準備する必要があります。Google アカウントを使います。
ここでは、下記の作業を行います。
Google Cloud プロジェクトの作成 Google Sheets API の有効化 Google Drive API の有効化 サービスアカウントの作成と設定 サービスアカウントの認証情報の取得 プロジェクトの作成 API を使用するにあたって、まずは Google Cloud プロジェクトを作成します。
Google Cloud プロジェクトは、システム全体を束ねるような存在です。構築するシステムの名称をプロジェクト名にするとよいでしょう。ここでは、仮に SPOT-DEV とします。
下記のリンクにアクセスし、プロジェクトを作成してください。
https://console.cloud.google.com/projectcreate
プロジェクト作成画面の例(個人)
組織に所属するアカウントでは、組織を選択する項目が並びます。
Sheets API の有効化 TWELITE SPOT からスプレッドシートを操作するために、Sheets API を有効化します。
下記のリンクにアクセスし、API を有効化してください。
https://console.cloud.google.com/apis/library/sheets.googleapis.com
Sheets APIの有効化を行う画面の例
Drive API の有効化 TWELITE SPOT からスプレッドシートを共有するために、Drive API を有効化します。
下記のリンクにアクセスし、API を有効化してください。
https://console.cloud.google.com/apis/library/drive.googleapis.com
Drive APIの有効化を行う画面の例
サービスアカウントの作成と設定 TWELITE SPOT からスプレッドシートを作成するために、サービスアカウントを作成します。
下記のリンクにアクセスし、プロジェクト名(ここでは SPOT-DEV )を選択してサービスアカウント一覧画面を表示したのち、ページ上部のボタンからサービスアカウントの作成を開始します。
https://console.cloud.google.com/iam-admin/serviceaccounts
サービスアカウント一覧の表示画面の例
「① サービスアカウントの詳細」では、サービスアカウントの名称を入力します。
下記の例では、spot-dev-sa としています。
サービスアカウント名の入力画面の例
入力したら、「作成して続行」ボタンを押して次へ進みます。
「② このサービスアカウントにプロジェクトへのアクセスを許可する(省略可)」では、サービスアカウントの権限を設定します。
ここでは、下記の例のようにして「オーナー」を選択してください。
サービスアカウント権限の入力画面の例
選択したら、「続行」ボタンを押して次へ進みます。
「③ ユーザーにこのサービスアカウントへのアクセスを許可(省略可)」では、何も行わずに「完了」を押してスキップします。
スキップする画面の例
サービスアカウントの作成が完了すると、サービスアカウントの一覧画面へ戻ります。作成したサービスアカウントが表示されていることを確認してください。
サービスアカウントの認証情報の取得 作成したサービスアカウントを確認したら、「メール」列のリンクをクリックし、サービスアカウントの詳細画面へ移ります。
サービスアカウントアカウント作成後の一覧画面の例
上部の「キー」タブを選択して、サービスアカウントの認証に必要な秘密鍵を管理する画面へ移ります。
サービスアカウントの詳細画面の例
「鍵を追加」ボタンから「新しい鍵を作成」を選択し、秘密鍵の作成を開始します。
鍵の作成ボタンの表示例
次の画面では、「JSON」を選択した状態のまま「作成」ボタンを押します。
タイプ選択画面の例
「作成」ボタンを押すと、秘密鍵ファイル(.json)が自動的にダウンロードされます。
秘密鍵ファイルの取り扱いには十分注意してください。
秘密鍵ファイルをテキストエディタで開くと、下記のような構成になっているはずです。
{
"type" : "service_account" ,
"project_id" : "???" ,
"private_key_id" : "???" ,
"private_key" : "-----BEGIN PRIVATE KEY-----\n???\n-----END PRIVATE KEY-----\n" ,
"client_email" : "???@???.iam.gserviceaccount.com" ,
"client_id" : "???" ,
"auth_uri" : "https://accounts.google.com/o/oauth2/auth" ,
"token_uri" : "https://oauth2.googleapis.com/token" ,
"auth_provider_x509_cert_url" : "https://www.googleapis.com/oauth2/v1/certs" ,
"client_x509_cert_url" : "???" ,
"universe_domain" : "googleapis.com"
} 上記のうち、project_id / private_key / client_email の内容を動作確認で使用します。
動作確認 まずは動作確認を行ってみましょう。
プロジェクトファイルを入手 GitHub (monowireless/spot-google-sheets) から Zip ファイルをダウンロードしますZip ファイルを展開し、フォルダ名を spot-google-sheets-main から spot-google-sheets に変更します Arduino のスケッチブックの保存場所(Arduino IDE 環境設定に記載。例:C:\Users\foo\Documents\Arduino)に spot-google-sheets フォルダを配置します スケッチの設定ファイルを修正 Arduino スケッチ spot-google-sheets.ino を開き、画面上部の config.h タブを選択して、4-11行目の値を修正してください。
4-5行目は、無線 LAN 関連の設定です。
const char * WIFI_SSID = "YOUR SSID" ; // Modify it
const char * WIFI_PASSWORD = "YOUR PASSWORD" ; // Modify it
SSID と パスワードを設定しています。
一方、8-11行目はスプレッドシート関連の設定です。
const char * PROJECT_ID = "YOUR-PROJECT-ID" ; // Modify it
const char * SERVICE_ACCOUNT_EMAIL = "YOUR-SERVICE-ACCOUNT@YOUR-PROJECT-ID.iam.gserviceaccount.com" ; // Modify it
const char PRIVATE_KEY[] PROGMEM = "-----BEGIN PRIVATE KEY----- \n YOUR-PRIVATE-KEY \n -----END PRIVATE KEY----- \n " ; // Modify it
const char * USER_ACCOUNT_EMAIL = "YOUR-ACCOUNT@EMAIL" ; // Modify it
最初の3項目には .json ファイルの内容をコピーして、最後の USER_ACCOUNT_EMAIL にはあなたがログインしている Google アカウントのメールアドレスを入力してください。
スケッチを書き込み ESP32 へのスケッチの書き込み方法 を参考に、スケッチを書き込んでください。
ツール -> Flash Size の設定が 16MB でないと正常に動きません。
パーティションテーブルには paritions.csv を使用しますが、全体のサイズが小さいと正しく書き込めないからです。
親機と子機を起動 TWELITE SPOT のリセットボタン(ESP32 側)を押してください。
Arduino のシリアルコンソールに以下のような表示がされたら、起動に成功しています。
Initializing queue...
Completed.
Started TWELITE.
Connecting to WiFi ...!...
Connected. IP: xxx.xxx.xxx.xxx
Initializing NTP...Completed. UNIX time: xxxxxxxxxx
Initializing sheets...
Creating sheets...
OAuth2.0 access token on initializing
OAuth2.0 access token on signing
OAuth2.0 access token on exchange request
OAuth2.0 access token ready
Requesting to create...
Succeeded.
Adding headers for ARIA...
Requesting to add header...
Succeeded.
Formatting the sheet for ARIA...
Requesting to format...
Succeeded.
Extending the sheet for ARIA...
Requesting to extend...
Succeeded.
Completed. TWELITE ARIA(初期設定)にもコイン電池を挿入し、電源を投入します。
コイン電池の挿入
TWELITE SPOT が TWELITE ARIA からのパケットを正常に受信し、データ列の追加に成功すると、下記のような表示がなされます。
Got a new packet from ARIA.
Got a new packet from ARIA.
Requesting to add data...
Got a new packet from ARIA.
Succeeded. ちなみに、上記の例ではリクエスト中にパケットを受信しています。後述 のマルチタスクに成功している証です!
Google へアクセス Google ドライブの 共有アイテム へアクセスし、SPOT Sheet (xxx) という名前のスプレッドシートを開きます。
以下のような画面が表示されます。
スプレッドシート画面のイメージ
スクロールしていくと、TWELITE ARIA からのデータを確認できるはずです。
最新の行へ移動するには、値の入った任意のセルをクリックしてから、Ctrl (⌘) + ↓ を押します。
TWELITE 子機のデータを Google スプレッドシートにアップロードできました!
スケッチ解説 Arduino スケッチ spot-google-sheets.ino の解説です。
ライブラリのインクルード Arduino および ESP32 公式ライブラリ 4-7行目では、Arduino および ESP32 の公式ライブラリをインクルードしています。
#include <Arduino.h>
#include <NTPClient.h>
#include <WiFi.h>
#include <WiFiUdp.h> ヘッダファイル 内容 備考 Arduino.hArduino の基本ライブラリ NTPClient.hNTP を使う ファイル名と受信時刻に使用 WiFi.hESP32 の WiFi を使う WiFiUdp.hUDP を使う NTPClient に必要
サードパーティのライブラリ 10-11行目では、サードパーティのライブラリをインクルードしています。
#include <ESP_Google_Sheet_Client.h>
#include <TimeLib.h> ヘッダファイル 内容 備考 ESP_Google_Sheet_Client.hGoogle へアクセスする TimeLib.hUNIX 時間をフォーマットする
MWings ライブラリ 14行目では、MWings ライブラリをインクルードしています。
ユーザ設定の定義 17行目では、config.h
config.h では、ユーザ設定を定義しています。実行時には、この設定を書き換えてください。
無線 LAN 設定の定義 config.h の4-5行目では、TWELITE SPOT に搭載された ESP32 に適用する無線 LAN 設定を定義します。
const char * WIFI_SSID = "YOUR SSID" ; // Modify it
const char * WIFI_PASSWORD = "YOUR PASSWORD" ; // Modify it
名称 内容 WIFI_SSID接続するネットワークの SSID WIFI_PASSWORD接続するネットワークの パスワード
API 設定の定義 config.h の8-11行目では、API の設定を定義しています。
const char * PROJECT_ID = "YOUR-PROJECT-ID" ; // Modify it
const char * SERVICE_ACCOUNT_EMAIL = "YOUR-SERVICE-ACCOUNT@YOUR-PROJECT-ID.iam.gserviceaccount.com" ; // Modify it
const char PRIVATE_KEY[] PROGMEM = "-----BEGIN PRIVATE KEY----- \n YOUR-PRIVATE-KEY \n -----END PRIVATE KEY----- \n " ; // Modify it
const char * USER_ACCOUNT_EMAIL = "YOUR-ACCOUNT@EMAIL" ; // Modify it
名称 内容 PROJECT_IDプロジェクト ID SERVICE_ACCOUNT_EMAILサービスアカウントのメールアドレス PRIVATE_KEY秘密鍵の本体 USER_ACCOUNT_EMAILスプレッドシートを共有するユーザアカウントのメールアドレス
ピン番号の定義 20-24行目では、ピン番号を定義しています。
const uint8_t TWE_RST = 5 ;
const uint8_t TWE_PRG = 4 ;
const uint8_t LED = 18 ;
const uint8_t ESP_RXD1 = 16 ;
const uint8_t ESP_TXD1 = 17 ; 名称 内容 TWE_RSTTWELITE の RST ピンが接続されているピンの番号 TWE_PRGTWELITE の PRG ピンが接続されているピンの番号 LED基板上の ESP32 用 LED が接続されているピンの番号 ESP_RXD1TWELITE の TX ピンが接続されているピンの番号 ESP_TXD1TWELITE の RX ピンが接続されているピンの番号
TWELITE 設定の定義 27-30行目では、TWELITE SPOT に搭載された TWELITE 親機に適用する設定を定義しています。
const uint8_t TWE_CH = 18 ;
const uint32_t TWE_APPID = 0x67720102 ;
const uint8_t TWE_RETRY = 2 ;
const uint8_t TWE_POWER = 3 ; 名称 内容 TWE_CHTWELITE の 周波数チャネル TWE_APPIDTWELITE の アプリケーション ID TWE_RETRYTWELITE の 再送回数(送信時) TWE_POWERTWELITE の 送信出力
このサンプルでは、TWELITE 親機からのコマンド送信を行わないため、29-30行目の内容は関係ありません。
シート関連の定義 32-43行目では、シートに関連した情報を定義しています。
const char * SPREADSHEET_TITLE_PREFIX = "SPOT Sheet" ;
const char * SPREADSHEET_LOCALE = "ja_JP" ;
const char * SPREADSHEET_TIME_ZONE = "Asia/Tokyo" ;
const int MIN_REQUEST_INTERVAL = 1000 ; // 60 requests per minute
const int SHEETS_DEFAULT_ROWS = 1000 ; // Default length is 1000 rows
const int SHEETS_ROWS = 100000 ; // Max 1,000,000 rows at 10 columns
const int ARIA_SHEET_ID = 1 ;
const char * ARIA_SHEET_TITLE = "ARIA" ;
constexpr int ARIA_BUFFER_PACKETS = 32 ; // Max number of rows per addition request
名称 内容 SPREADSHEET_TITLE_PREFIXスプレッドシートのファイル名の固定部分 SPREADSHEET_LOCALEスプレッドシートのロケール SPREADSHEET_TIME_ZONEスプレッドシートのタイムゾーン MIN_REQUEST_INTERVALリクエスト送信の最小間隔 SHEETS_DEFAULT_ROWS各シートのデフォルトの行数 SHEETS_ROWS各シートの行数 ARIA_SHEET_IDARIA 用シートの ID ARIA_SHEET_TITLEARIA 用シートの名称 ARIA_BUFFER_PACKETSARIA からのパケットを格納するキューの長さ
TWELITE ARIA 以外の子機に対応するときには、同一のスプレッドシート(ワークブック)に別のシートを作成することを推奨します。
したがって、ID、タイトル、キューの長さの3点を付け加える必要があります。
型の宣言 46-50行目では、型を宣言しています。
struct ParsedAppAriaPacketWithTime {
ParsedAppAriaPacket packet;
uint32_t elapsedMillis;
uint32_t unixTime;
}; 名称 内容 ParsedAppAriaPacketWithTime受信したパケットデータを受信時刻と合わせてキューへ格納するための型
elapsedMillis :パケット受信時の起動からの経過時間(ミリ秒)unixTime :パケット受信時の UNIX 時間(秒)です。
TWELITE ARIA 以外の子機に対応するときには、新たにキューを作成する必要があります。
したがって、ParsedAppAriaPacketWithTime のようなキュー格納用の型についても付け加える必要があります。
グローバルオブジェクトの宣言 53-61行目では、グローバルオブジェクトを宣言しています。
WiFiUDP ntpUDP;
NTPClient timeClient (ntpUDP, "ntp.nict.jp" , 32400 );
String spreadsheetIdString; // Identifier of newly created file
bool readyForNewRequests = false;
uint32_t lastTimeRequestWasSent = UINT32_MAX;
QueueHandle_t ariaPacketQueue; // Store received data from ARIA
uint32_t rowToAddNewAriaData = 2 ; // Starting with the Row 2
名称 内容 ntpUDPNTP のための UDP インタフェース timeClientNTP のインタフェース spreadsheetIdString作成したスプレッドシートのID readyForNewRequests新たなリクエストを送信できる状態になったら true lastTimeRequestWasSent最後にリクエストを送信した時間 ariaPacketQueueARIA から受信したパケットと受信時刻を格納するキュー rowToAddNewAriaData次に ARIA から受信したデータを追加する行
ariaPacketQueue は、Arduino core for the ESP32 のベースになっている FreeRTOS の Queue 機能を使います。
TWELITE ARIA 以外の子機に対応するときには、受信データを格納するキューと書き込み先の行番号を格納する変数を付け加えます。
関数プロトタイプの宣言 64-71行目では、関数プロトタイプを宣言しています。
void anotherLoop ();
void waitUntilNewRequestsReady ();
String createSpreadsheet ();
bool formatSheet (const String spreadsheetId, const int sheetId);
bool extendSheet (const String spreadsheetId, const int sheetId, const int rows);
bool addSheetAriaHeaderRow (const String spreadsheetId, const char * const sheetTitle);
bool addSheetsDataRow (const String spreadsheetId); 名称 内容 anotherLoop()非同期で TWELITE の処理を行う、もうひとつの loop() waitUntilNewRequestsReady()次のリクエストを送信可能になるまで待機する createSpreadsheet()スプレッドシートを新規作成する formatSheet()指定したシートの書式を設定する extendSheet()指定したシートの行を増やし、書式を設定する addSheetAriaHeaderRow()指定したシートへ ARIA 向けのヘッダー行を追加する addSheetsDataRow()シートへデータ行を追加する
API のリクエストからレスポンスを待つ間にも TWELITE の受信処理を止めないために、FreeRTOS のマルチタスク機能を使って anotherLoop() を作成し、そのなかで Twelite.update() を実行しています。
TWELITE ARIA 以外の子機に対応するときには、例えば、下記のような方針でリクエストの内容を追加します。
createSpreadsheet() :スプレッドシートを増やすように改変するformatSheet() :新たなシートもフォーマットするように改変するextendSheet() :内容はそのまま、新たなシートに対しても呼び出すaddSheet**HeaderRow() :関数ごと付け加えるaddSheetsDataRow() :新たなシートへデータを追加する処理を追加するキューの設定 82-83行目では、受信したパケットデータを受信時刻と合わせて格納するためのキューを初期化しています。
ariaPacketQueue = xQueueCreate(ARIA_BUFFER_PACKETS, sizeof (ParsedAppAriaPacketWithTime));
if (ariaPacketQueue == 0 ) { Serial.println("Failed to init a queue." ); } xQueueCreate()
TWELITE ARIA 以外の子機に対応するときには、新たなキューについても初期化します。
TWELITE の設定 88-92行目では、Twelite.begin()
Serial2.begin(115200 , SERIAL_8N1, ESP_RXD1, ESP_TXD1);
if (Twelite.begin(Serial2,
LED, TWE_RST, TWE_PRG,
TWE_CH, TWE_APPID, TWE_RETRY, TWE_POWER)) {
Serial.println("Started TWELITE." );
} 引数 型 内容 Serial2HardwareSerial&TWELITE との通信に使うシリアルポート LEDintステータス LED を接続したピンの番号 TWE_RSTintTWELITE の RST ピンを接続したピンの番号 TWE_PRGintTWELITE の PRG ピンを接続したピンの番号 TWE_CHANNELuint8_tTWELITE の 周波数チャネル TWE_APP_IDuint32_tTWELITE の アプリケーション ID TWE_RETRYuint8_tTWELITE の 再送回数(送信時) TWE_POWERuint8_tTWELITE の 送信出力
イベントハンドラの登録 94-103行目では、TWELITE ARIA からのパケットを受信した際に行う処理を登録しています。
Twelite.on([](const ParsedAppAriaPacket& packet) {
Serial.println("Got a new packet from ARIA." );
ParsedAppAriaPacketWithTime packetWithTime;
packetWithTime.elapsedMillis = millis();
packetWithTime.unixTime = timeClient.getEpochTime();
packetWithTime.packet = packet;
if (not(xQueueSend(ariaPacketQueue, & packetWithTime, 0 ) == pdPASS)) {
Serial.println("Failed to add packet data to the queue." );
}
});
TWELITE CUE など他の子機を使用する場合は、新たなイベントハンドラを追加します。
ここでは、xQueueSend()
無線 LAN の設定 106-120行目では、無線 LAN の設定を行っています。
WiFi.mode(WIFI_STA);
WiFi.setAutoReconnect(true);
WiFi.begin(WIFI_SSID, WIFI_PASSWORD);
Serial.print("Connecting to WiFi .." );
while (WiFi.status() != WL_CONNECTED) {
static int count = 0 ;
Serial.print('.' );
delay(500 );
// Retry every 5 seconds
if (count++ % 10 == 0 ) {
WiFi.disconnect();
WiFi.reconnect();
Serial.print('!' );
}
} ここでは、無線 LAN 子機として設定したうえで、指定のネットワークへ接続しています。
ネットワークに接続できるまで、while 文を出ません。
上記の実装では、5秒に一度、再接続を試みています。
NTP の設定 126-127行目では、NTP の設定をしています。
timeClient.begin();
timeClient.update(); Google スプレッドシートの設定 132-145行目では、Google スプレッドシートを設定しています。
GSheet.setTokenCallback([](TokenInfo info) {
// Print token initialization states
if (info.status == esp_signer_token_status_error) {
Serial.print("Token error " );
Serial.println(GSheet.getTokenError(info));
}
Serial.print(GSheet.getTokenType(info));
Serial.print(" " );
Serial.println(GSheet.getTokenStatus(info));
});
GSheet.setPrerefreshSeconds(60 ); // Set refresh rate for auth token
Serial.println("Initializing sheets..." );
GSheet.begin(SERVICE_ACCOUNT_EMAIL, PROJECT_ID, PRIVATE_KEY); 132-141行目でサービスアカウントのトークンを取得する際の状態表示の処理を登録したあと、142行目でトークンの再取得間隔を設定、145行目でサービスアカウントの初期化をしています。
また、147-173行目では、スプレッドシートの作成、ARIA 向けヘッダー行の追加、セルの書式設定、そして行の拡張を行っています。
Serial.println("Creating sheets..." );
waitUntilNewRequestsReady(); // Wait for token
= createSpreadsheet();
if (not(spreadsheetIdString.length() > 0 )) {
Serial.println("Failed to create sheets." );
}
Serial.println("Adding headers for ARIA..." );
delay(MIN_REQUEST_INTERVAL);
waitUntilNewRequestsReady();
if (not addSheetAriaHeaderRow(spreadsheetIdString, ARIA_SHEET_TITLE)) {
Serial.println("Failed to add headers." );
}
Serial.println("Formatting the sheet for ARIA..." );
delay(MIN_REQUEST_INTERVAL);
waitUntilNewRequestsReady();
if (not formatSheet(spreadsheetIdString, ARIA_SHEET_ID)) {
Serial.println("Failed to format." );
}
Serial.println("Extending the sheet for ARIA..." );
delay(MIN_REQUEST_INTERVAL);
waitUntilNewRequestsReady();
if (not extendSheet(spreadsheetIdString, ARIA_SHEET_ID, SHEETS_ROWS - SHEETS_DEFAULT_ROWS)) {
Serial.println("Failed to extend." );
}
デフォルトでは、A-Z 列のセルが 1,000 行続きます。ここでは列を A-J の 10 列に絞り、行数を 100倍の 100,000 行に増やしています。
それでも足りない場合には、さらに行を増やす必要があります。ただし、セルの上限は 10,000,000 個のため、 A-J の10 列の場合、最大 1,000,000 行に制限されます。それ以上はセルを増やせないため、新たなスプレッドシート(ワークブック)を作成する必要があります。
TWELITE ARIA 以外の子機に対応するときには、新たに付け加えたヘッダ行作成関数などの呼び出しを付け加えます。
タスクの登録 179-186行目では、TWELITE のデータを非同期で更新するためのタスクを登録しています。
xTaskCreatePinnedToCore(
[](void * params) {
while (true) {
anotherLoop();
vTaskDelay(1 );
}
},
"Task for anotherLoop()" , 8192 , nullptr , 18 , nullptr , 0 ); xTaskCreatePinnedToCore()
ここでは、180-185行目のラムダ式を渡し、anotherLoop() を無限に呼ぶタスクを登録しています。
[](void * params) {
while (true) {
anotherLoop();
vTaskDelay(1 ); // IMPORTANT for Watchdog
},
無限ループを含むタスクでは、必ず vTaskDelay(1); などを挿入し、ウォッチドッグタイマの入る隙を与えてください。
タスクの名称は Task for anotherLoop() で、スタックサイズは 8192 、タスクへのパラメータはなく、優先度は 18(大きいほど高く、無線 LAN 関連の処理は1個上の 19)、タスクを操作するインタフェースもなく、実行する CPU コアは無線 LAN などの RF 処理と同じ Core 0 です( loop() 等は Core 1 )。
"Task for anotherLoop()" , 8192 , nullptr , 18 , nullptr , 0 ); // Priority is 18 (lower than WiFi)
TWELITE のデータの更新 203行目では、anotherLoop() 内にて Twelite.update()
Twelite.update() は、TWELITE 親機から送信されるパケットデータ(ModBus ASCII 形式)を順次1バイトずつ読み出す関数です。
loop() 内で繰り返し
Twelite.update() を呼ぶことで、TWELITE 親機から送信されるパケットデータの解釈が進みます。パケットデータの解釈を終えた際に
上記 のようなイベントが呼ばれる仕組みです。
通常、
delay() などの処理でこの関数の呼び出しをブロックすると、パケットデータ文字列の読み出しが間に合わないことがあります。しかし、このスケッチでは FreeRTOS の機能によって
anotherLoop() を切り離しているため、たとえ
loop() 内で同期処理があっても問題ありません。
スプレッドシートの更新 192-195行目では、スプレッドシートの更新処理を呼び出しています。
if (millis() - lastTimeRequestWasSent > MIN_REQUEST_INTERVAL) {
// Add available data
} 192行目の if 文では、60リクエスト毎分の API 制限を守るために、前回のリクエスト送信から必ず 1 秒以上空けるようにしています(JavaScript の Throttle / Debounce における Throttle に相当します)。
194行目では、必要に応じてスプレッドシートへデータ行を追加します。
addSheetsDataRow(spreadsheetIdString); API ライブラリの更新 196行目では、Google API 用ライブラリの更新を行い、リクエストの送信可否の状態を取得しています。
readyForNewRequests = GSheet.ready(); NTP ライブラリの更新 197行目では、NTP ライブラリの更新を行っています。
スプレッドシートの操作 217行目以降では、Sheets API によるスプレッドシートの操作を行っています。
詳しくは ライブラリの API リファレンス や Sheets API の REST リソース をご覧ください。
関連情報 Google Arduino ESP32 コミュニティ ライブラリ プラグイン 3.5.2.5 - ThingSpeak によるグラフ表示 TWELITE ARIA のデータを ThingSpeak のサイト上に表示するためのサンプルスケッチ spot-thingspeak の解説
無線 LAN 子機として振る舞い、MathWorks のサービス
ThingSpeak を使って温湿度データをグラフ化するためのサンプルスケッチ
spot-thingspeak の解説です。
3.5.2.5.1 - ThingSpeak によるグラフ表示 最新版
無線 LAN 子機として振る舞い、MathWorks のサービス
ThingSpeak を使って温湿度データをグラフ化するためのサンプルスケッチ
spot-thingspeak の解説です。
本稿では、サードパーティのオープンソースソフトウェアを使用します。
サードパーティのソフトウェアについて、その詳しい使用方法を弊社からご案内することはいたしかねます。また、サードパーティのソフトウェアを使用されたことによるいかなる損害についても、弊社は一切の責任を負いません。
ソースコードの入手 GitHub リポジトリ monowireless/spot-thingspeak から入手できます。
システムの概要 spot-thingspeak サンプルは、TWELITE ARIA から受信したデータを HTTP GET リクエストとして ThingSpeak のサーバへ送信し、グラフとして表示できるようにします。
表示例
このサンプルでは例として子機に TWELITE ARIA を使用しますが、HTTP リクエストの使用方法には関係しません。
基本的に、spot-httpbin サンプルを改変して作られています。そちらの解説もご覧ください。
主に NTP 関連のコードを消去し、リクエストの内容を変えている点が異なります。
開発に必要なもの 環境整備 ThingSpeak の設定 ThingSpeak のサイト へアクセスし、MathWorks のアカウントを作成します“Channel” を作成し、次のように設定します。 Channelの設定例
“API Keys” タブにある、16文字の “Write API key” を控えておきます IDE とツールチェインの導入 Arduino IDE 1.x による開発環境の構築方法 をご覧ください。
または
Arduino IDE 2.x による開発環境の構築方法 をご覧ください。
プロジェクトファイルの入手 GitHub (monowireless/spot-thingspeak) から Zip ファイルをダウンロードしますZip ファイルを展開し、フォルダ名を spot-thingspeak-main から spot-thingspeak に変更します Arduino のスケッチブックの保存場所(Arduino IDE 環境設定に記載。例:C:\Users\foo\Documents\Arduino)に spot-thingspeak フォルダを配置します ユーザ設定の変更 Arduino IDE 上部のタブから config.h を開き、Wi-Fi の SSID と パスワードを設定してください。WPA2-PSK ネットワークを想定しています。
また、先ほど控えた 16文字の “Write API key” についても設定してください。必要に応じて、ルート証明書も書き換えてください。
プロジェクトファイルの書き込み ESP32 へのスケッチの書き込み方法 をご覧ください。
TWELITE ARIA の設定と起動 TWELITE ARIA の設定を変更 し、TWELITE ARIA モード の送信間隔 を30秒以上(例:60秒)とします(サーバへの過負荷を避けるため)CR2032 電池を投入し、TWELITE ARIA を起動します スケッチ Arduino スケッチ spot-thingspeak.inoconfig.h
ライブラリのインクルード Arduino および ESP32 公式ライブラリ 5-7行目では、Arduino および ESP32 の公式ライブラリをインクルードしています。
#include <Arduino.h>
#include <WiFiClientSecure.h>
#include <WiFi.h> ヘッダファイル 内容 備考 Arduino.hArduino の基本ライブラリ 省略できる場合もあるが念のため記載 WiFiClientSecure.hESP32 で SSL通信を行う WiFi.hWi-Fiを扱う 省略できる場合もあるが念のため記載
MWings ライブラリ 13行目では、MWings ライブラリをインクルードしています。
ユーザ設定の定義 16行目では、config.h
config.h では、ユーザ設定を定義しています。実行時には、この設定を書き換えてください。
データ型の定義 19-26行目では、子機から受信したデータを保管しておく構造体の型を定義しています。
struct DataFromAria {
uint32_t serialId;
uint8_t logicalId;
uint16_t supplyVoltage;
uint8_t linkQuality;
int16_t temp100x;
uint16_t humid100x;
}; 名称 内容 serialIdシリアルID logicalId論理デバイスID supplyVoltage電源電圧 linkQualityLQI temp100x100倍された温度 humid100x100倍された湿度
ここでは、TWELITE ARIA を使用します。
config.h再起動間隔の定義 config.h の4行目では、ESP32 の再起動間隔を指定しています。
const uint32_t REBOOT_INTERVAL = 21600 ; // seconds
ここでは、21600秒=6時間としています。
長期間の運用では、メモリリークが累積して不具合を起こしてしまう場合があります。
そこで Wi-Fi ルータのように定期的な再起動を行うようにしています。
TWELITE 設定の定義 config.h の7-8行目では、TWELITE SPOT に搭載された TWELITE 親機に適用する設定を定義しています。
const uint8_t TWE_CH = 18 ;
const uint32_t TWE_APPID = 0x67720102 ; 名称 内容 TWE_CHTWELITE の 周波数チャネル TWE_APPIDTWELITE の アプリケーション ID
Wi-Fi 設定の定義 config.h の11-12行目では、TWELITE SPOT に搭載された ESP32 に適用するWi-Fi 設定を定義しています。
const char * WIFI_SSID = "YOUR SSID" ;
const char * WIFI_PASSWORD = "YOUR PASSWORD" ; 名称 内容 WIFI_SSID接続するネットワークの SSID WIFI_PASSWORD接続するネットワークのパスワード
ThingSpeak の Write API key config.h の15行目では、ThingSpeak の “Channel” の “Field” へデータを追加するために必要な “Write API key” を定義しています。
ルート証明書 config.h の18-41行目では、Google Chrome を使って api.thingspeak.com から取得したルート証明書の中身を記述しています。必要に応じて書き換えてください。
const char * CA_CERT = R"(
----- BEGIN CERTIFICATE-----
中略
----- END CERTIFICATE-----
)"; ホストの設定 config.h の43-44行目では、ホストの設定を定義しています。
const char * SERVER_HOST = "api.thingspeak.com" ;
const uint16_t SERVER_PORT = 443 ; 名称 内容 SERVER_HOSTサーバのホスト名 SERVER_PORTサーバのポート番号
SERVER_HOST には、https://を含めないようにしてください。DNS Failed / with error '-54'のエラーを引き起こします。
各種定数の定義 config.h の46行目からは、各種定数を定義しています。
const int QUERIES_MAX_LENGTH = 128 ; // bytes (without \0)
const int32_t CONNECT_TIMEOUT = 10 ; // seconds
const uint32_t RECONNECT_MIN_INTERVAL = 5 ; // seconds
// According to thingspeck free limitations, SEND_MIN_INTERVAL is set for 20s.
const uint32_t SEND_MIN_INTERVAL = 20 ; // seconds
const uint32_t REQUEST_TIMEOUT = 10 ; // seconds
名称 内容 QUERIES_MAX_LENGTHクエリ文字列の最大長(ヌル文字含まず) CONNECT_TIMEOUTサーバへの接続時のタイムアウト RECONNECT_MIN_INTERVALWi-Fiアクセスポイントへ再接続する際の最短間隔 SEND_MIN_INTERVALリクエスト間隔の最短間隔 REQUEST_TIMEOUTリクエストからレスポンスまでのタイムアウト
SEND_MIN_INTERVAL は、20秒に設定しています。
ThingSpeak の API の呼び出し制限によるものです。
SEND_MIN_INTERVAL を短くすると、連続してパケットを受信した場合にサーバへ負担をかけてしまいます。
必ず適度な間隔を空けてください。
ピン番号の定義 spot-thingspeak.ino の29-34行目では、ピン番号を定義しています。
static const int RST_PIN = 5 ;
static const int PRG_PIN = 4 ;
static const int LED_PIN = 18 ;
static const int8_t RX1_PIN = 16 ;
static const int8_t TX1_PIN = 17 ; 名称 内容 RST_PINTWELITE の RST ピンが接続されているピンの番号 PRG_PINTWELITE の PRG ピンが接続されているピンの番号 LED_PIN基板上の ESP32 用 LED が接続されているピンの番号 RX1_PINTWELITE の RX1 ピンが接続されているピンの番号 TX1_PINTWELITE の TX1 ピンが接続されているピンの番号
グローバルオブジェクトの宣言 37行目では、グローバルオブジェクトを宣言しています。
static WiFiClientSecure client; 名称 内容 clientHTTPS通信のインタフェース
グローバル変数の宣言 40-41行目では、グローバル変数を宣言しています。
static DataFromAria LatestDataFromAria;
static bool IsThereNewDataFromAria; 名称 内容 LatestDataFromAriaTWELITE ARIA から受信した最新のデータ IsThereNewDataFromAriaTWELITE ARIA から新たなデータを受信したことを示すフラグ
関数プロトタイプの宣言 44-54行目では、関数プロトタイプを宣言しています。
void anotherLoopForTWELITE (); 名称 内容 anotherLoopForTWELITETWELITEのデータを処理するためのループ関数
void initTWELITE ();
void initWiFi (); 名称 内容 initTWELITETWELITEの初期化関数 initWiFiWi-Fiの初期化関数
void onAppAriaPacket (const ParsedAppAriaPacket& packet); 名称 内容 onAppAriaPacketTWELITE ARIA からデータを受信した際のコールバック関数
void sendAriaData(const DataFromAria& data) 名称 内容 sendAriaDataTWELITE ARIAのデータを HTTP GET リクエストにのせて送る関数
setup()57-74行目では、全体の初期化を行います。
void setup () {
Serial.begin(115200 );
initTWELITE();
initWiFi();
// Attach another loop function for TWELITE
// Note: Core 0 is also used for the WiFi task, which priority is 19 (ESP_TASKD_EVENT_PRIO - 1)
[](void * params) {
while (true) {
anotherLoopForTWELITE();
vTaskDelay(1 ); // IMPORTANT for Watchdog
},
"Task for anotherLoopForTWELITE()" , 8192 , nullptr , 18 , nullptr ,
0 ); // Priority is 18 (lower than WiFi)
xTaskCreatePinnedToCore()loop() とは別のタスクを登録しています。
下記の部分はキャプチャのない無名関数です。不要なグローバル空間の汚染を避けることができます。
[](void * params) {
while (true) {
anotherLoopForTWELITE();
vTaskDelay(1 ); // IMPORTANT for Watchdog
},
ウォッチドッグタイマへ介入する余地を設けるために、vTaskDelay() を挿入しています。
loop()77-99行目は、主となるループ処理です。
HTTP リクエストの処理、Wi-Fi 切断時の再接続処理、定期リセットの処理を行います。
void loop () {
static uint32_t lastTimeReconnected = 0 ;
if (WiFi.status() == WL_CONNECTED) {
// Regular operations
// Check for new data
if (IsThereNewDataFromAria) {
IsThereNewDataFromAria = false; // Clear first; data is updated on another thread
= LatestDataFromAria; // Now, the buffer is open for incoming data
}
} else if (millis() - lastTimeReconnected > RECONNECT_MIN_INTERVAL * 1000 ) {
// Lost connection, reconnect periodically
"Disconnected. Reconnecting to WiFi..." );
WiFi.begin(WIFI_SSID, WIFI_PASSWORD);
lastTimeReconnected = millis();
}
// Reboot every x interval
if (millis() > REBOOT_INTERVAL * 1000 ) {
Serial.println("Rebooting..." );
ESP.restart();
}
} anotherLoopForTWELITE()102-104行目は、TWELITE のためのループ処理です。
データの受信と解釈を逐次行うため、ブロッキング処理を含む loop() とは別のタスクとしています。
void anotherLoopForTWELITE () {
Twelite.update();
} initTWELITE()107-114行目は、TWELITE の初期化処理です。
TWELITE SPOT に搭載された TWELITE を指定された設定で起動し、パケット受信時のコールバック関数を登録しています。
void initTWELITE () {
Serial2.begin(115200 );
if (Twelite.begin(Serial2, LED_PIN, RST_PIN, PRG_PIN, TWE_CHANNEL, TWE_APP_ID)) {
Serial.println("Started TWELITE." );
}
// Attach event handlers to process packets
} initWiFi()117-144行目は、Wi-Fi の初期化処理です。
接続されない場合は、5秒置きに再接続を試みます。
void initWiFi () {
Serial.print(" \n Connecting to the WiFi network " );
Serial.print(WIFI_SSID);
Serial.println("..." );
// Begin
WiFi.setAutoReconnect(true);
WiFi.begin(WIFI_SSID, WIFI_PASSWORD);
// Wait for connection
"Connecting." );
while (WiFi.status() != WL_CONNECTED) {
static int count = 0 ;
Serial.print('.' );
delay(500 );
// Retry every 5 seconds
if (count++ % 10 == 0 ) {
WiFi.disconnect();
WiFi.reconnect();
Serial.print('!' );
}
}
Serial.println(" \n Connected!" );
// Set Root CA certificate
} onAppAriaPacket()147-157行目には、TWELITE ARIA からデータを受信した際の処理を記述しています。
ここでは HTTP の送信処理を行わず、グローバル変数へセットしています。
グローバル変数へセットしたデータは、別のタスクで sendAriaData() によって処理します。
void onAppAriaPacket (const ParsedAppAriaPacket& packet)
{
// Store data
= packet.u32SourceSerialId;
LatestDataFromAria.logicalId = packet.u8SourceLogicalId;
LatestDataFromAria.supplyVoltage = packet.u16SupplyVoltage;
LatestDataFromAria.linkQuality = packet.u8Lqi;
LatestDataFromAria.temp100x = packet.i16Temp100x;
LatestDataFromAria.humid100x = packet.u16Humid100x;
IsThereNewDataFromAria = true;
} sendAriaData()160-220行目は、TWELITE ARIA のデータを HTTP GET リクエストのクエリ文字列にセットして送信する関数です。
サーバへの過度な負荷を防ぐため、高頻度でパケットが到着した際には送信をスキップしています。
void sendAriaData (const DataFromAria& data)
{
static uint32_t lastTimeRequested = 0 ;
if (millis() - lastTimeRequested > SEND_MIN_INTERVAL * 1000 or lastTimeRequested == 0 ) {
Serial.println("Connecting to the server..." );
if (not client.connect(SERVER_HOST, SERVER_PORT, CONNECT_TIMEOUT * 1000 )) {
Serial.println("Connection failed!" );
} else {
Serial.println("Connected to the server!" );
// Make a query string for the Channel on the ThingSpeak
char queries[QUERIES_MAX_LENGTH+ 1 ];
snprintf(queries, sizeof (queries),
"api_key=%s&field1=%s&field2=%s&field3=%s&field4=%d" ,
// Write API key for the Channel
// Field 1: Temperature
/ 100.0f , 2 ),
// Field 2: Humidity
/ 100.0f , 2 ),
// Field 3: Supply Voltage
/ 1000.0f , 2 ),
// Field 4: Link Quality
// Send a request
"GET https://" ) +
SERVER_HOST +
String("/update?" ) +
queries +
String(" HTTP/1.1" ));
client.println("Accept: */*" );
client.println(String("Host: " ) + SERVER_HOST);
client.println("Connection: close" );
client.println();
uint32_t timeSentRequest = millis();
// Handle a response
while (client.connected()) {
String line = client.readStringUntil('\n' );
if (line == " \r " ) {
Serial.print("Index (if succeeded): " );
break ;
}
if (millis() - timeSentRequest > REQUEST_TIMEOUT * 1000 ) {
Serial.println("Request was timed out" );
break ;
}
}
while (client.available()) {
char c = client.read();
Serial.write(c);
}
client.stop();
Serial.println("" );
}
lastTimeRequested = millis();
} else {
Serial.println("Requests are too frequently; skip." );
}
} 4 - TWELITE WINGS API / MWings TWELITE の親機を接続した端末で利用するライブラリ
MWings は、親機・中継機アプリ(App_Wings)を書き込んだ TWELITE を接続した端末で利用するライブラリです。App_Wings が出力する書式文字列を解釈し、親機が受信したデータを端末へ提供します。また、App_Wings へのコマンドを構成し、子機を操作します。
4.1 - TWELITE Wings API / MWings for Python Python のための TWELITE Wings API / MWings
4.1.1 - TWELITE Wings API / MWings for Python 最新版
TWELITE Wings API (MWings) を使うことで、PC 上の Python スクリプトから TWELITE を扱うことができるようになります。
Python に関する知識と経験のある読者を想定しています。
ライブラリの概要 TWELITE Wings API (以降 MWings) は、Python スクリプトから TWELITE を扱うためのライブラリです。
機能 ホストへ接続された TWELITE の親機を通じて、TWELITE の子機と通信できます。
受信データを解釈して、辞書や JSON のほか pandas データフレームへ変換※ 辞書から生成したコマンドを親機へ送信 ※ Lite版は pandas に非対応
Raspberry Pi には、通常版ではなくLite版を推奨します
モジュール名はmwingsmwingslite pandas や numpy, pyarrow 等への依存関係がありませんRaspberry Pi では、これらをPyPIから導入できないことがあります なお pandas がないとき、データフレームを出力する関数 to_df() 通常版と同じく、辞書やJSON文字列の出力には対応しています 要求する Python のバージョンを 3.11 以降へ落としています(通常版は 3.12 以降) 用途例 例えば、次のようなシステムを実現できます。
MONOSTICK で受信した温湿度データを JSON としてクラウドサーバへ送信 MONOSTICK で受信した加速度データを CSV または Excel ファイルへ記録※ PC から MONOSTICK を通じて TWELITE DIP へ接続された LED を制御 ※ Lite版は、直接 CSV や Excel ファイルを出力できません
特徴 モダン Python の モダン Python による モダン Python のためのモジュールです。
※ 例外あり。詳細は後述
インストール PyPI から入手できます。
pip の場合
poetry の場合
最も簡単なサンプルスクリプト わずか6行で超簡単!標準アプリ(App_Twelite)の受信データを JSON 形式で出力できます。
import mwings as mw
twelite = mw. Twelite(mw. utils. ask_user_for_port())
@twelite.on (mw. common. PacketType. APP_TWELITE)
def on_app_twelite (packet):
print(packet. to_json())
twelite. start()
Lite版の場合 import mwings as mwをimport mwingslite as mwとします。
環境整備と動作確認
MWings ライブラリは pip を使うだけで導入できますが、ここでは処理系やモジュールの依存関係の管理に対応した開発環境の構築方法を紹介します。また、TWELITE DIP の入力状態をJSON形式で表示するサンプルスクリプトを作成し、ライブラリの動作確認を行います。
用意するもの PC MONOSTICK (親機・中継機アプリ/デフォルト設定)TWELITE DIP (超簡単!標準アプリ/デフォルト設定)スイッチなどのペリフェラルを接続しておく(例:DI1 ポートと GND 間にタクトスイッチを接続) 環境整備
以下は一例です。Python 3.12 以降(Lite版は3.11以降)が使える環境であれば問題ありません。
好みの環境があれば、読み飛ばして ください。
外部ツールの使用において、当社は一切の責任を負いません。
また、外部ツールに関する質問はご遠慮ください。
pyenv の導入 処理系のバージョンを管理するために、pyenv を導入します。
Linux
curl https://pyenv.run | bash
事前に開発ツールを導入しておかなくてはならない場合があります Debian系
sudo apt update; sudo apt install build-essential libssl-dev zlib1g-dev libbz2-dev libreadline-dev libsqlite3-dev curl git libncursesw5-dev xz-utils tk-dev libxml2-dev libxmlsec1-dev libffi-dev liblzma-dev Fedora系
yum install gcc make patch zlib-devel bzip2 bzip2-devel readline-devel sqlite sqlite-devel openssl-devel tk-devel libffi-devel xz-devel 参考:Home · pyenv/pyenv Wiki
macOS
brew update
brew install pyenv
必要に応じて Homebrew を導入してください
/bin/bash -c " $( curl -fsSL https://raw.githubusercontent.com/Homebrew/install/HEAD/install.sh) "
事前に開発ツールを導入しておかなくてはならない場合があります Debian系
brew install openssl readline sqlite3 xz zlib tcl-tk 参考:Home · pyenv/pyenv Wiki
Windows Windows 向けの pyenv はありません。代わりに pyenv-win を使用します。
Invoke-WebRequest -UseBasicParsing -Uri "https://raw.githubusercontent.com/pyenv-win/pyenv-win/master/pyenv-win/install-pyenv-win.ps1" -OutFile "./install-pyenv-win.ps1" ; &"./install-pyenv-win.ps1" pyenv / pyenv-win による Python の導入 MWings が対応する Python 3.12 以降(Lite版は3.11以降)の処理系を導入します。
導入できるバージョンの一覧を取得するには、下記を実行します。
ここでは例として、Python 3.12.4 を導入し、システム全体へ適用します。
pyenv install 3.12.4
pyenv global 3.12.4 導入済みバージョンの一覧を取得するには、下記を実行してください。
pipx の導入 poetry のようなコマンドラインツールを隔離された環境で管理するために、pipx を導入します。
Linux Debian系
sudo apt update
sudo apt install pipx
pipx ensurepath pipから(Raspberry Piはこちらを推奨)
python3 -m pip install --user pipx
python3 -m pipx ensurepath Fedora系
sudo dnf install pipx
pipx ensurepath 参考:Installation - pipx
macOS
brew install pipx
pipx ensurepath Windows
scoop install pipx
pipx ensurepath
必要に応じて Scoop を導入してください
Set-ExecutionPolicy -ExecutionPolicy RemoteSigned -Scope CurrentUser
Invoke-RestMethod -Uri https: //get.scoop.sh | Invoke-Expression poetry の導入 プロジェクトに対する処理系のバージョンやモジュールの依存関係を Node.js のような形で管理するために、poetry を導入します。
エラーを吐く場合 TypeError: __init__() got an unexpected keyword argument 'encoding'といったエラーを吐く場合は、pipxをパッケージマネージャではなくpipから導入してみてください。
python3 -m pip install --user pipx
python3 -m pipx ensurepath プロジェクトの作成 ここでは、プロジェクト名を mwtest とします。
プロジェクトを作成するディレクトリへ移動し、下記を実行してください。
mwtest ディレクトリを生成します。
プロジェクトの設定 プロジェクトへ移動し、先ほど pyenv で導入した 処理系のバージョンを紐付けます。
MWings を導入します。
Linuxにて応答しない場合 次の環境変数の設定をお試しください。
export PYTHON_KEYRING_BACKEND= keyring.backends.null.Keyring 最も簡単なサンプルスクリプトの作成 まずは、先ほど紹介したスクリプト を動かしてみましょう。
import mwings as mw
twelite = mw. Twelite(mw. utils. ask_user_for_port())
@twelite.on (mw. common. PacketType. APP_TWELITE)
def on_app_twelite (packet):
print(packet. to_json())
twelite. start()
Lite版の場合 Raspberry Pi のserial0を使う例を次に示します。
import mwingslite as mw
twelite = mw. Twelite("/dev/ttyS0" )
@twelite.on (mw. common. PacketType. APP_TWELITE)
def on_app_twelite (packet):
print(packet. to_json())
twelite. start() なお pyserial の制約により、mw.utils.ask_user_for_port()は/dev/ttyS0を検知できません。
上記の内容で poetry が生成した __init__.py と同じ階層に simple.py を作成します。
📁 mwtest
└ 📁 mwtest
├ 📄 __init__.py
└ 📄 simple.py 最も簡単なサンプルスクリプトの実行 MONOSTICK を接続し、実行します。
poetry run python simple.py 複数のシリアルポートが存在する場合は、シリアルポートを選択してください。
JSON 文字列の出力を得ることができたら成功です。実際の出力例を下記に示します。
{
"time_parsed" : "2024-02-20T03:16:50.150386+00:00" ,
"packet_type" : "APP_TWELITE" ,
"sequence_number" : 13699 ,
"source_serial_id" : "810E0E23" ,
"source_logical_id" : 120 ,
"lqi" : 84 ,
"supply_voltage" : 3249 ,
"destination_logical_id" : 0 ,
"relay_count" : 0 ,
"periodic" : true ,
"di_changed" : [
true ,
true ,
false ,
false
],
"di_state" : [
false ,
false ,
false ,
false
],
"ai_voltage" : [
8 ,
272 ,
1032 ,
112
],
"mwings_implementation" : "python" ,
"mwings_version" : "1.0.0" ,
"hostname" : "silverstone.local" ,
"system_type" : "Darwin"
}
JSON 文字列の内容 mwings.parsers.app_twelite.ParsedPacket
キー 値 time_parsed受信時刻(デフォルトはUTC, ISO8601形式) packet_typeパケット種別 sequence_numberシーケンス番号(App_Tweliteの場合は時間) source_serial_id送信元シリアルID source_logical_id送信元論理デバイスID lqi電波通信品質(8bit) supply_voltage電源電圧(mV) destination_logical_id送信先論理デバイスID relay_count中継回数 periodic定期送信パケットか否か di_changed各デジタルインタフェースの入力変化の有無 di_state各デジタルインタフェースの入力状態 ai_voltage各アナログインタフェースの入力電圧 mwings_implementationMWings の実装(将来のための情報) mwings_versionMWings のバージョン hostname受信したホストの名称 system_type受信したホストのシステムの種別
実用的なスクリプトの作成 simple.py はあくまでも説明用のサンプルです。実用的なスクリプトではありません。
なぜなら、twelite.start()
次はより実用的なスクリプトを作成しましょう。それを実行したのち、内容を解説します。
今回は、下記の3点を条件とします。
Ctrl+C により、スレッドを正常終了できるようにすることPEP8 へ準拠すること(一部例外あり、詳細は後述 )型ヒント を導入することこれらを適用した例を下記に示します。
# -*- coding:utf-8 -*-
# Written for Python 3.12
# Formatted with Black
# MWings example: Receive data, print JSON, typed
from zoneinfo import ZoneInfo
import mwings as mw
# Main function
def main () -> None :
# Create a twelite object
twelite = mw. Twelite(mw. utils. ask_user_for_port())
# Use JST for received data
twelite. set_timezone(ZoneInfo("Asia/Tokyo" ))
# Register an event handler
@twelite.on (mw. common. PacketType. APP_TWELITE)
def on_app_twelite (packet: mw. parsers. app_twelite. ParsedPacket) -> None :
print(packet. to_json(verbose= True , spread= False ))
# Start receiving
try :
# Set as daemon thread
twelite. daemon = True
# Start the thread, Join to the main thread
twelite. start()
print("Started receiving" )
while True :
twelite. join(0.5 )
except KeyboardInterrupt :
# Stop the thread
print("Flushing..." )
twelite. stop()
print("Completed" )
if __name__ == "__main__" :
# Call the main function
main()
Lite版の場合 冒頭の import mwings as mwをimport mwingslite as mwとしてください。
上記を practical.py として保存してください。
📁 mwtest
└ 📁 mwtest
├ 📄 __init__.py
├ 📄 simple.py
└ 📄 practical.py 実用的なスクリプトの実行 下記のコマンドを実行すると、simple.py と同じようにして JSON 形式の出力を得ることができます。
poetry run python practical.py ただし、今回はエラーを発生させずに Ctrl+C で終了できるほか、time_parsed は日本標準時になっているものと思います。
実用的なスクリプトの解説 コードの解説 practical.py を解説します。
import 文practical.py では、2つのモジュールを import しています。
from zoneinfo import ZoneInfo
import mwings as mw zoneinfo.ZoneInfomwings MWings ライブラリです。mw に短縮して呼び出せるようにしています。Lite版の場合は mwingslite です。オブジェクトの作成 mw.Twelite オブジェクトは、ホストへ接続された TWELITE の親機へアクセスするためのインタフェースとなります。
# Create a twelite object
twelite = mw. Twelite(mw. utils. ask_user_for_port()) mw.utils.ask_user_for_port()
明示的にシリアルポートを指定する方法 mw.Twelite のコンストラクタ
# Linux
twelite = mw. Twelite("/dev/ttyUSBx" )
# macOS
twelite = mw. Twelite("/dev/cu.usbserial-MWxxxxxx" )
# Windows
twelite = mw. Twelite("COMx" )
シリアルポートを使用しない場合 ログファイルを解釈するような用途では、None を指定します。
twelite = mw. Twelite(port= None ) タイムゾーンの設定 デフォルトでは、データの受信時刻を UTC として扱います。
practical.py では、これを JST としています。
# Use JST for received data
twelite. set_timezone(ZoneInfo("Asia/Tokyo" )) ZoneInfo には IANA のタイムゾーン識別子を渡してください。
受信ハンドラの登録 TWELITE の子機から送られるデータを処理するには、受信ハンドラを登録します。ここでは、超簡単!標準アプリ向けの受信ハンドラ内で受信したデータを JSON 形式に変換し、それを出力しています。
# Register an event handler
@twelite.on (mw. common. PacketType. APP_TWELITE)
def on_app_twelite (packet: mw. parsers. app_twelite. ParsedPacket) -> None :
print(packet. to_json(verbose= True , spread= False )) 受信ハンドラは、任意の関数へ twelite.on()? を適用することで登録できます。
受信ハンドラは、
mw.Twelite オブジェクトの初期化後に同一のスコープへ定義する必要があります(
practical.py では
main() 関数内)。受信ハンドラの定義箇所に制約を設けることで、グローバル空間の不要な汚染を避けるように誘導しています。
受信ハンドラにおけるパケット種別の指定 受信ハンドラが受け取るデータの内容は、パケットの種別に応じて定義されたデータクラスに基づきます。
超簡単!標準アプリ
@twelite.on (mw. common. PacketType. APP_TWELITE)
def foobar (packet: mw. parsers. app_twelite. ParsedPacket):
# handle packets リモコンアプリ
@twelite.on (mw. common. PacketType. APP_IO)
def foobar (packet: mw. parsers. app_io. ParsedPacket):
# handle packets アリア(通常)
@twelite.on (mw. common. PacketType. APP_ARIA)
def foobar (packet: mw. parsers. app_aria. ParsedPacket):
# handle packets キュー(通常)
@twelite.on (mw. common. PacketType. APP_CUE)
def foobar (packet: mw. parsers. app_cue. ParsedPacket):
# handle packets キュー(動作パル・ムーブ/ダイス)
@twelite.on (mw. common. PacketType. APP_CUE_PAL_EVENT)
def foobar (packet: mw. parsers. app_cue_pal_event. ParsedPacket):
# handle packets 動作パル/キュー(動作パル・連続)
@twelite.on (mw. common. PacketType. APP_PAL_MOT)
def foobar (packet: mw. parsers. app_pal_mot. ParsedPacket):
# handle packets 環境パル
@twelite.on (mw. common. PacketType. APP_PAL_AMB)
def foobar (packet: mw. parsers. app_pal_amb. ParsedPacket):
# handle packets 開閉パル/アリア・キュー(開閉パル)
@twelite.on (mw. common. PacketType. APP_PAL_OPENCLOSE)
def foobar (packet: mw. parsers. app_pal_openclose. ParsedPacket):
# handle packets シリアル通信(書式A、簡易)
@twelite.on (mw. common. PacketType. APP_UART_ASCII)
def foobar (packet: mw. parsers. app_uart_ascii. ParsedPacket):
# handle packets シリアル通信(書式A、拡張)
@twelite.on (mw. common. PacketType. APP_UART_ASCII_EXTENDED)
def foobar (packet: mw. parsers. app_uart_ascii_extended. ParsedPacket):
# handle packets アクト
@twelite.on (mw. common. PacketType. ACT)
def foobar (packet: mw. parsers. act. ParsedPacket):
# handle packets 受信ハンドラが受け取るデータクラス ParsedPacketto_json()to_dict()pandas データフレームへ変換する to_df()
ここでは、to_json()
print(packet. to_json(verbose= True , spread= False ))
オプション引数について verbose オプションを False とした場合は system_type などのシステム情報を出力しません。また、spread オプションを True とした場合は di_state などの List-like な要素(mw.common.CrossSectional[T]mw.common.TimeSeries[T]
なお to_df()spread オプションはありません。時系列でない List-like なデータは強制的に個別の列へ展開されるほか、時系列データは個別の行へ展開されます。
受信の開始と終了 mw.Twelite は、threading.Threadpractical.py では、twelite.start()twelite.stop()
# Start receiving
try :
# Set as daemon thread
twelite. daemon = True
# Start the thread, Join to the main thread
twelite. start()
print("Started receiving" )
while True :
twelite. join(0.5 )
except KeyboardInterrupt :
# Stop the thread
print("Flushing..." )
twelite. stop()
print("Completed" ) twelite.daemonTrue へ設定すると、受信処理を担うサブスレッドは デーモン化 されます。デーモンでない生存中のスレッドがすべて終了すると、 Python プログラム全体も終了します。ここではメインスレッド内で twelite.join()
メインスレッドは Ctrl+C の入力を検知すると except 節で twelite.stop()twelite.stop()
join()に関する注意次のように while ループを使用しない場合、Windows において Ctrl+C を受け付けないことがあります。
try :
...
twelite. join()
except KeyboardInterrupt :
... 補足説明 PEP8 への対応 practical.py や MWings のソースコードは、PEP8 に対応したコードフォーマッタ Black を使ってフォーマットされています。
正確には、完全に PEP8 へ準拠しているわけではありません Black は一行の最大長を除き、いかなる設定も受け付けない頑固なフォーマッタですが、コーディング規約を策定・共有する手間を省くことができます。コーディングルールはしばしば物議を醸す議題ですが、そうした取るに足らない作業へ費やすリソースを有益な作業へ割り当てることこそが Python らしさの本質でしょう。
プロジェクトへ Black を追加するには、下記を実行します。
poetry add --group dev black
dev グループを指定することで、開発時の依存関係であることを示しています。Node.js の devDependencies と似ています。
対象のファイルやディレクトリを指定して実行できます。
フォーマットせずに確認だけ行うこともできます。
poetry run black --check mwtest 型ヒントへの対応 practical.py や MWings のソースコードは、型ヒント へ対応しています。
型ヒントとは 型ヒントは Python 3.5 で実装された機能です。動的型付けの Python における型アノテーションは実行時に意味を成しませんが、静的型チェッカによる検査はコードの品質と信頼性の向上に寄与します。
型ヒントに対応していないライブラリは、静的型チェッカのエラーを引き起こします。従来の パルスクリプト は未対応でした。
MWings ライブラリは、Python 公式の静的型チェッカである mypy を使用しています。
プロジェクトへ mypy を追加するには、下記を実行します。
poetry add --group dev mypy こちらも Black と同様に、対象のファイルやディレクトリを指定して実行できます。
関連情報 実用的なスクリプトの応用 practical.py をさらに発展させたスクリプトを公開しています。
mwings_python/examples at main
親機の出力を保存したテキストファイルを読み込み、解釈した結果を pandas データフレームへ保存し、最終的に CSV または Excel ファイルを出力します。Lite版は非対応。
コマンドラインツールとして利用できます
poetry run python log_export.py -h
usage: log_export.py [ -h] [ -x] [ -v] [ -s] INPUT_FILE
Parse a log file for App_Wings
positional arguments:
INPUT_FILE text file contains logs from App_Wings
options:
-h, --help show this help message and exit
-x, --excel export an Excel file instead of CSV
-v, --verbose include system information
-s, --sort sort columns in the output 接続された親機の出力を受け取り、解釈した結果を pandas データフレームへ保存し、最終的に CSV または Excel ファイルを出力します。Lite版は非対応。
CSV ファイルを選択した場合、すべての結果を一つのファイルへ保存します。 代わりに Excel ファイルを選択した場合、パケットの種別ごとに別のシートへ保存します。
コマンドラインツールとして利用できます
poetry run python rx_export.py -h
usage: rx_export.py [ -h] [ -x] [ -v] [ -s]
Log packets from App_Wings to csv or excel
options:
-h, --help show this help message and exit
-x, --excel export an Excel file instead of CSV
-v, --verbose include system information
-s, --sort sort columns in the output
rx_export.py は受信したデータのすべてを一旦 pandas データフレームへ保存するため、長期間に渡る記録には適していません。しかし、Excel ファイルの出力に対応しています。
接続された親機の出力を受け取り、解釈した結果を送信元のシリアルIDごとに CSV ファイルへ追記していきます。Lite版は非対応。
コマンドラインツールとして利用できます
poetry run python rx_export_csv_durable.py -h
usage: rx_export_csv_durable.py [ -h] [ -v] [ -s]
Log packets from App_Wings to csv, line by line
options:
-h, --help show this help message and exit
-v, --verbose include system information
-s, --sort sort columns in the output
rx_export_csv_durable.py はデータを受信するたびに CSV ファイルを開き、データを追記 します。rx_export.py と異なり Excel ファイルの出力を行えませんが、長期間に及ぶ記録に適しています。
接続された親機の出力を受け取り、単に解釈した結果を pandas データフレームへ変換し、文字列として出力します。Lite版は非対応。
接続された親機の出力を受け取り、単に解釈した結果を辞書へ変換して出力します。Lite版も対応。
接続された親機の出力を受け取り、単に解釈した結果を JSON 文字列へ変換して出力します。Lite版も対応。
接続されたシリアル通信アプリの親機を介して、TWELITE UART へバイナリデータ [0xBE, 0xEF] を送ります。Lite版も対応。
接続された親機・中継機アプリの親機を介して、TWELITE DIP の DO1 ポートに接続された LED を点滅させます。Lite版も対応。
接続された親機・中継機アプリの親機を介して、通知パルの LED を各色で点灯させます。Lite版も対応。
8秒ごとに3秒間点滅させるコマンドを送信します。通知パルの問い合わせ間隔(送信間隔)を2秒など短めに設定してください。デフォルトでは60秒に一度更新されます。
API リファレンス 4.2 - TWELITE Wings API / MWings for 32-bit Arduinos 32ビット Arduino ボードのための TWELITE Wings API / MWings
4.2.1 - TWELITE Wings API / MWings for 32-bit Arduinos 最新版
4.2.1.1 - TWELITE SPOT に使用する TWELITE SPOT に搭載された ESP32 に使用する方法
TWELITE SPOT スタートガイド:
TWELITE 子機からのデータ受信 をご覧ください。
4.2.1.2 - Arduino UNO R4 に使用する Arduino UNO R4 シリーズに使用する方法
Arduino UNO R4 シリーズ へ TWELITE UART や TWELITE DIP などの TWELITE 親機を接続し、MWings ライブラリを使って子機との通信を行う方法を案内します。
ハードウェアの準備 TWELITE の準備 TWELITE UART や TWELITE DIP といった製品へ親機・中継機アプリ(App_Wings)を書き込みます。
書き込みには TWELITE STAGE APP を使用 します。
2023年12月現在、シリアル通信によるアプリケーションID等の設定に対応した最新版の App_Wings(v1.3.0+)は TWELITE STAGE SDK に同梱しておりません(次期リリースに追加収録の予定です)。
下記をダウンロードしてから、書き込んで ください。
シリアル通信によるアプリケーションID等の設定を行わない場合は、従来の親機・中継機アプリを使用できます。
Arduino UNO R4 との接続 TWELITE のピンのうち、下記を使用します。
VCC(3.3V へ接続) GND(GND へ接続) TXD(D0/RX へ接続) RXD(D1/TX へ接続) RST(D11 など任意のポートへ接続) PRG(D12 など任意のポートへ接続)
Arduino UNO R4 の I/O ポートは 5V レベルですが、TWELITE は 3.3V レベルのため、レベル変換を必要とします。
RST および PRG ピンは、Arduino の起動時に TWELITE をリセットするために接続することを推奨します。
ライブラリ付属のサンプルスケッチに準じた接続例を以下に示します。
Arduino との接続例
Arduino Ethernet Shield 2 など、SPI 接続のシールドが D10-13 を使用するときは、別のピンを割り当ててください。
ソフトウェアの準備 ライブラリの導入 Arduino ライブラリマネージャからインストールできます。
TWELITE SPOT マニュアル:MWings ライブラリの導入 を参照してください。
サンプルスケッチの動作確認 ライブラリには、各 TWELITE と通信を行うための簡単なサンプルスケッチを同梱しています。
例えば、超簡単!標準アプリ(App_Twelite)のデータを受信する場合は、メニューバーから以下のサンプルスケッチを開きます。
ファイル > スケッチ例 > MWings > Arduino UNO R4 > Receive > monitor_uno_r4_app_twelite
表示例
monitor_uno_r4_app_twelite.ino
// Monitor example for TWELITE with Arduino UNO R4: Receive data from App_Twelite
#include <Arduino.h>
#include "MWings.h"
const int RST_PIN = D11;
const int PRG_PIN = D12;
const int LED_PIN = D13; // Use on-board LED as indicator
const uint8_t TWE_CHANNEL = 18 ;
const uint32_t TWE_APP_ID = 0x67720102 ;
void setup ()
{
// Initialize serial ports
while (! Serial && millis() < 5000 ); // Wait for internal USB-UART
115200 );
Serial.println("Monitor example for TWELITE with Arduino UNO R4: App_Twelite" );
Serial1.begin(115200 );
// Initialize TWELITE
if (Twelite.begin(Serial1,
LED_PIN, RST_PIN, PRG_PIN,
TWE_CHANNEL, TWE_APP_ID)) {
Serial.println("Successfully initialized TWELITE" );
} else {
Serial.println("Failed to initialize TWELITE" );
}
// Attach an event handler to process packets from App_Twelite
const ParsedAppTwelitePacket& packet) {
Serial.println("" );
Serial.print("Packet Timestamp: " );
Serial.print(packet.u16SequenceNumber / 64.0f , 1 ); Serial.println(" sec" );
Serial.print("Source Logical ID: 0x" );
Serial.println(packet.u8SourceLogicalId, HEX);
Serial.print("LQI: " );
Serial.println(packet.u8Lqi, DEC);
Serial.print("Supply Voltage: " );
Serial.print(packet.u16SupplyVoltage, DEC); Serial.println(" mV" );
Serial.print("Digital Input: " );
Serial.print(packet.bDiState[0 ] ? " DI1:Lo" : " DI1:Hi" );
Serial.print(packet.bDiState[1 ] ? " DI2:Lo" : " DI2:Hi" );
Serial.print(packet.bDiState[2 ] ? " DI3:Lo" : " DI3:Hi" );
Serial.println(packet.bDiState[3 ] ? " DI4:Lo" : " DI4:Hi" );
Serial.print("Analog Input: " );
Serial.print(" AI1:" ); Serial.print(packet.u16AiVoltage[0 ]); Serial.print(" mV" );
Serial.print(" AI2:" ); Serial.print(packet.u16AiVoltage[1 ]); Serial.print(" mV" );
Serial.print(" AI3:" ); Serial.print(packet.u16AiVoltage[2 ]); Serial.print(" mV" );
Serial.print(" AI4:" ); Serial.print(packet.u16AiVoltage[3 ]); Serial.println(" mV" );
});
}
void loop ()
{
// Update TWELITE
}
/*
* Copyright (C) 2023 Mono Wireless Inc. All Rights Reserved.
* Released under MW-OSSLA-1J,1E (MONO WIRELESS OPEN SOURCE SOFTWARE LICENSE AGREEMENT).
*/
スケッチの詳細については、TWELITE SPOT 向けのスケッチ解説をご覧ください。大半の内容は共通しています。
以下は Arduino UNO R4 に固有の部分です。
ポート設定 6-8行目では、UART 関連を除く Arduino のポートを設定しています。
const int RST_PIN = D11;
const int PRG_PIN = D12;
const int LED_PIN = D13; // Use on-board LED as indicator
ポート 役割 備考 D11 TWELITEのRST制御 上記 の接続例参照D12 TWELITEのPRG制御 上記 の接続例参照D13 通信インジケータLED制御 内蔵LEDを使用
USBシリアルポートの初期化待ち 16行目では、USB シリアルポート(Serial)の初期化を待っています。
while (! Serial && millis() < 5000 ); // Wait for internal USB-UART
Arduino UNO R4 は、UNO R3 のように USB シリアル変換 IC を搭載しておらず、本体の ARM CPU が USB シリアル変換機能を担っています。
そのため、シリアルポートの初期化が終了する前は通信を行えません。
関連情報 MWings ライブラリ API リファレンス TWELITE SPOT スタートガイドのスケッチ解説(スケッチ内容の大半は共通しています) TWELITE SPOT マニュアルの一部のスケッチ解説(スケッチ内容の大半は共通しています) 4.2.1.3 - パケットパーサの拡張 パケットパーサを追加する方法
MWings ライブラリでは、パケットパーサを簡単に追加できます。
ここでは、例として無線タグアプリ(App_Tag)のアナログセンサ用パーサの追加作業を取り上げます。
概要 パーサを追加するためには、次の4点のファイルを編集する必要があります。
(新規)パーサのヘッダファイル parser/FooBarPacketParser.h解釈するパケットの中身と、正規パケットの判定条件を書く (新規)パーサのソースファイル parser/FooBarPacketParser.cpp (追記)本体のヘッダファイル MWings.h (追記)本体のソースファイル MWings.cpp
ソースファイルは GitHub から入手してください。
通常、Arduino のホームディレクトリ内にある libraries/ へ配置します。
パーサのヘッダファイル parser/ 以下にある既存のファイルを複製したうえで名称変更してください。
ここでは、parser/AppTagAdcPacketParser.h を作成します。
#ifndef APPTAGADCPACKETPARSER_H
#define APPTAGADCPACKETPARSER_H
#include "MWings_Common.h"
/**
* @struct ParsedAppTagAdcPacket
* @brief Packet content for App_Tag (ADC)
*/
struct ParsedAppTagAdcPacket final : public mwings:: ParsedPacketBase {
uint32_t u32RouterSerialId;
uint8_t u8SensorType;
uint16_t u16AiVoltage[2 ];
};
/**
* @class apptagadc::PacketParser
* @brief Packet parser for App_Tag (ADC)
*/
namespace apptagadc {
class PacketParser final : public mwings:: PacketParserBase {
public :
// Check if the packet is from App_Tag (ADC)
inline bool isValid(const BarePacket& barePacket) const override {
if ((barePacket.u8At(12 ) == 0x10 )
and (barePacket.u32At(18 ) == 0 )
and (barePacket.u16PayloadSize == 22 )) {
return true;
}
return false;
}
// Parse from bare packet
bool parse (const BarePacket& barePacket, mwings:: ParsedPacketBase* const parsedPacket) const override ;
};
}
extern apptagadc:: PacketParser AppTagAdcPacketParser;
#endif // APPTAGADCPACKETPARSER_H
解釈するパケットの中身の記述 はじめに、App_Tag(アナログセンサ)の出力書式 を確認してください。
出力データの例
:80000000B700628201015A0010DF08FD09A300000000E9 # データ 内容 値 :charヘッダ :800000000 uint32中継機のシリアルID 中継なし B74 uint8LQI 183/25500625 uint16続き番号 988201015A7 uint32送信元のシリアルID 0x201015A0011 uint8送信元の論理デバイスID 0x001012 uint8センサー種別 アナログセンサー DF13 uint8電源電圧(mV) 3330mV08FD14 uint16ADC1の電圧 2301mV09A316 uint16ADC2の電圧 2467mV0000000018 uint32未使用 E922 uint8チェックサム 0xE9charフッタ \rcharフッタ \n
インクルードガードやnamespace、コメント文を置換したら、mwings::ParsedPacketBase
ここでは、対象の子機に固有のデータを記述します。宛先の論理デバイスIDといった一般的なデータは、既にmwings::ParsedPacketBaseへ登録されているからです。
mwings::ParsedPacketBaseにある項目型 名称 内容 uint32_tu32SourceSerialId送信元のシリアルID uint8_tu8SourceLogicalId送信元の論理デバイスID uint16_tu16SequenceNumberシーケンス番号 uint8_tu8LqiLQI uint16_tu16SupplyVoltage電源電圧 (mV)
電源電圧など、空き項目があっても構いません。
以下の部分において、App_Tag(アナログセンサ)に固有のデータを宣言しています。
struct ParsedAppTagAdcPacket final : public mwings:: ParsedPacketBase {
uint32_t u32RouterSerialId;
uint8_t u8SensorType;
uint16_t u16AiVoltage[2 ];
}; 正規パケットの判定条件の記述 mwings::PacketParserBaseを継承したapptagadc::PacketParserを作成し、純粋仮想関数isValid()をオーバーライドすることで正規パケットの判定条件を記述してください。
この条件に沿ったパケットを受信したとき、解釈を行います。
以下の部分では、センサ種別が0x12(アナログセンサ)であること、未使用領域が0であること、ペイロードの長さが22バイトであることを確認しています。
inline bool isValid (const BarePacket& barePacket) const override {
if ((barePacket.u8At(12 ) == 0x10 )
and (barePacket.u32At(18 ) == 0 )
and (barePacket.u16PayloadSize == 22 )) {
return true;
}
return false;
} パーサのソースファイル parser/ 以下にある既存のファイルを複製したうえで名称変更してください。
ここでは、parser/AppTagAdcPacketParser.cpp を作成します。
#include "AppTagAdcPacketParser.h"
apptagadc:: PacketParser AppTagAdcPacketParser;
bool apptagadc:: PacketParser:: parse(const BarePacket& barePacket, mwings:: ParsedPacketBase* const parsedPacket) const
{
// WARNING: Note that there is NO RTTI
* const parsedAppTagAdcPacket = static_cast < ParsedAppTagAdcPacket*> (parsedPacket);
parsedAppTagAdcPacket-> u32SourceSerialId = barePacket.u32At(7 );
parsedAppTagAdcPacket-> u8SourceLogicalId = barePacket.u8At(11 );
parsedAppTagAdcPacket-> u16SequenceNumber = barePacket.u16At(5 );
parsedAppTagAdcPacket-> u8Lqi = barePacket.u8At(4 );
const uint16_t ecc = barePacket.u8At(13 );
if (ecc <= 170 ) {
parsedAppTagAdcPacket-> u16SupplyVoltage = 5 * ecc + 1950 ;
} else {
parsedAppTagAdcPacket-> u16SupplyVoltage = 10 * (ecc - 170 ) + 2800 ;
}
parsedAppTagAdcPacket-> u32RouterSerialId = barePacket.u32At(0 );
parsedAppTagAdcPacket-> u8SensorType = barePacket.u8At(12 );
for (int i = 0 ; i < 2 ; i++ ) {
parsedAppTagAdcPacket-> u16AiVoltage[i] = barePacket.u16At(2 * i+ 14 );
}
return true;
} 解釈する部分の記述 ヘッダファイル名やnamespaceを置換したら、parse()の中身を記述します。
以下の部分では、データ書式に従ってパケットの中身を格納しています。
無線タグアプリ(アナログセンサ)の出力書式
# データ 内容 備考 charヘッダ :のみ0 uint32中継機のシリアルID 中継なしは80000000 4 uint8LQI 0-2555 uint16続き番号 7 uint32送信元のシリアルID 11 uint8送信元の論理デバイスID 12 uint8センサー種別 13 uint8電源電圧(mV) 電源電圧の計算 を参照14 uint16ADC1の電圧 16 uint16ADC2の電圧 18 uint32未使用 22 uint8チェックサム
BarePacket.u8At()など
// WARNING: Note that there is NO RTTI
* const parsedAppTagAdcPacket = static_cast < ParsedAppTagAdcPacket*> (parsedPacket);
parsedAppTagAdcPacket-> u32SourceSerialId = barePacket.u32At(7 );
parsedAppTagAdcPacket-> u8SourceLogicalId = barePacket.u8At(11 );
parsedAppTagAdcPacket-> u16SequenceNumber = barePacket.u16At(5 );
parsedAppTagAdcPacket-> u8Lqi = barePacket.u8At(4 );
const uint16_t ecc = barePacket.u8At(13 );
if (ecc <= 170 ) {
parsedAppTagAdcPacket-> u16SupplyVoltage = 5 * ecc + 1950 ;
} else {
parsedAppTagAdcPacket-> u16SupplyVoltage = 10 * (ecc - 170 ) + 2800 ;
}
parsedAppTagAdcPacket-> u32RouterSerialId = barePacket.u32At(0 );
parsedAppTagAdcPacket-> u8SensorType = barePacket.u8At(12 );
for (int i = 0 ; i < 2 ; i++ ) {
parsedAppTagAdcPacket-> u16AiVoltage[i] = barePacket.u16At(2 * i+ 14 );
}
static_castについてここでは、mwings::ParsedPacketBase*からapptagadc::ParsedPacketへのダウンキャストをdynamic_castではなくstatic_castによって行っています。これは、ハードウェアの制約により実行時型情報が使えないことに起因しています。
本体のヘッダファイル 既存のパーサに加えて、新たなパーサを追加します。
インクルード文の追加 パケットパーサのヘッダファイルをインクルードします。
//// AppTagAdcPacketParser for App_Tag (ADC)
#include "parser/AppTagAdcPacketParser.h" 初期化子リストの拡張 イベントハンドラをnullptrで初期化します。
//// AppTagAdcPacketParser for App_Tag (ADC)
nullptr ), 終了処理の追加 イベントハンドラをnullptrに戻します。
//// AppTagAdcPacketParser for App_Tag (ADC)
= nullptr ; イベントハンドラの登録メソッドの追加 イベントハンドラを登録するon()メソッドを追加します。
//// AppTagAdcPacketParser for App_Tag (ADC)
inline void on (void (* callback)(const ParsedAppTagAdcPacket& packet)) { _onAppTagAdcPacket = callback; } イベントハンドラの追加 イベントハンドラを格納するポインタを追加します。
//// AppTagAdcPacketParser for App_Tag (ADC)
void (* _onAppTagAdcPacket)(const ParsedAppTagAdcPacket& packet); 本体のソースファイルの編集 既存のパース処理に加えて、新たなパース処理を追加します。
イベントハンドラの初期化 begin()の呼びだし時にもイベントハンドラが初期化されるようにします。
//// AppTagAdcPacketParser for App_Tag (ADC)
= nullptr ; パース処理の追加 対象のパケットを受信したときに解釈を行うようにします。
//// Start: AppTagAdcPacketParser for App_Tag (ADC)
if (AppTagAdcPacketParser.isValid(barePacket) and _onAppTagAdcPacket) {
ParsedAppTagAdcPacket parsedAppTagAdcPacket;
if (AppTagAdcPacketParser.parse(barePacket, & parsedAppTagAdcPacket)) {
_onAppTagAdcPacket(parsedAppTagAdcPacket);
}
}
//// End: AppTagAdcPacketParser for App_Tag (ADC)
変更の適用 スケッチをビルドしたときに、ライブラリも再ビルドされます。
5 - Miscellaneous その他
その他の製品やサービスのマニュアル
5.1 - TWELITE PAL/CUE/ARIA Script TWELITE SENSE PALなどからのデータを処理するPythonスクリプト
新しいライブラリ MWings for Python をご検討ください。
パルシリーズ以外の TWELITE へ対応したほか、JSON や pandas データフレーム等を出力できます。
TWELITE PAL Script は、TWELITE SENSE PAL (センサーパル), TWELITE CUE (加速度センサー・磁気センサー), TWELITE ARIA (温湿度センサー・磁気センサー) からのデータの解釈、ログ記録するためのサンプルスクリプトです。
本アプリケーションは参考として提供されています。
本アプリケーションならびに本ドキュメントは無保証です。 予告無く仕様が変更されます。 モノワイヤレス ソフトウェア使用許諾 (MW-SLA-1J/E) に基づきます。 5.1.1 - 使用方法 TWELITE PAL Scriptの使用方法
TWELITE PALとMONOSTICKを使う場合の使用方法をご案内いたします。
PCの準備 ダウンロードしたアーカイブをわかりやすいフォルダ(例えばC:) に解凍する。
下記WebページよりPCの環境にあったAnacondaをダウンロードし、インストールする。https://www.anaconda.com/download/
Anaconda Promptを立ち上げ、下記コマンドを実行しpyserialをインストールする。 (Windowsの場合、Anaconda Promptは スタートメニュー → Anaconda3 内にあるのでそちらから立ち上げること。)
Anacondaをインストールしない場合 下記のインストール手順はOSがWindowsの場合の一例です。 各種ライブラリのドキュメントをご覧の上、必要なソフトウェアおよびライブラリをインストールしてください。
下記ページよりPythonの最新版をダウンロードしインストールする。https://www.python.org/downloads/
コマンドプロンプトを立ち上げ、下記コマンドを入力しpyserialをインストールする。
TWELITE PAL の準備 BLUE PAL/RED PALにSENSE PALを接続する。 BLUE PAL/RED PALの電池ホルダーにコイン型電池(CR2032)を挿入する。 MONOSTICK の準備 MONOSTICKのアプリ(App_PAL-Parent-xxx-MONOSTICK.bin)を書き換える。 MONOSTICKをリセットもしくはUSBポートに差しなおす。 スクリプトの実行方法 MONOSTICKのCOMポートがCOM6の場合、Anaconda Promptで下記コマンドを実行すると下記のようなデータが出力されます。(Teratermが接続された状態では起動できません。)
cd C:\P AL_Script
python PAL_Script.py -t COM6
*** MONOWIRELESS App_PAL_Viewer 1.1.0 ***
*** Open COM6 ***
ArriveTime : 2021/03/05 09:43:28.880
LogicalID : 1
EndDeviceSID : 10B6465
RouterSID : No Relay
LQI : 180 ( -35.50 [ dBm])
… スクリプトを終了させるにはAnaconda PromptでCtrl+Cを入力してください。
スクリプトの引数 スクリプト実行時に以下の引数を使用できます。
引数:-h 機能:コマンドライン引数の一覧を表示
引数:-t 機能:MONOSTICKが使用するポート名を指定
引数:-b 機能:MONOSTICKが使用するポートのボーレートを指定
引数:-l 機能:CSV形式のログを出力
CSVファイルの読み方は下記表の通りです。
見出し 値の説明 単位 LogicalID 子機の論理デバイスID - EndDeviceSID 子機のシリアルナンバー - LQI LQI - Power 電源電圧 mV ADC* 電圧 mV HALLIC マグネットセンサーの状態 - Temperature 温度 ℃ Humidity 湿度 % Illuminance 照度 Lux AccelerationX
加速度 g
5.1.2 - ソースファイル TWELITE PAL Scriptのソースファイル
動作環境 以下の環境で動作確認を行いました。
5.1.2.1 - PAL_Script.py TWELITE PAL Scriptの実行用スクリプト
本スクリプトを起動するためのコードで、MONOSTICKからのデータを読み込み、解釈されたデータの標準出力を行います。
読み出し方法 以下のコード例では、都度 MONOSTICK からデータを受信したかどうかを確認し、受信していればMain()に渡す処理を行っています。
from apppal import AppPAL
...
def mainloop (PAL):
global end_flag
try :
from Main_user import Main
except :
mainflag = False
else :
mainflag = True
if PAL. ReadSensorData():
if mainflag:
Main(PAL)
else :
PAL. ShowSensorData()
...
if __name__ == '__main__' :
...
try :
PAL = AppPAL(port= options. target, baud= options. baud, tout= 0.05 , sformat= options. format, autolog= bEnableLog, err= bEnableErrMsg, stdinput= options. stdinp, Logfilename= options. file)
except :
print("Cannot open \" AppPAL \" class..." )
exit(1 )
while True :
try :
mainloop(PAL)
except KeyboardInterrupt :
break
del PAL まず、AppPALオブジェクトを生成します。オブジェクト生成時にシリアルポートの設定も行うため、シリアルポートの設定パラメータを引数として渡します。
PPAL = AppPAL(port= options. target, baud= options. baud, tout= 0.05 , sformat= options. format, autolog= bEnableLog, err= bEnableErrMsg, stdinput= options. stdinp, Logfilename= options. file) 次にmainloop()でシリアルデータが来ているかどうかを判断するために ReadSensorData() を呼びます。返り値が True だったら、解釈したをMain()に渡します。
def mainloop (PAL):
# ユーザが処理を記述するMain関数がインポートできるか確認する。
try :
from Main_user import Main
except :
mainflag = False
else :
mainflag = True
# データがあるかどうかの確認
if PAL. ReadSensorData():
if mainflag:
# Main関数が読めたらPALオブジェクトをMain()に渡す
Main(PAL)
else :
# Main関数が読めなかったらコンソールにデータを表示する。
PAL. ShowSensorData() 受け取る辞書に関してはこちら を参照してください。
5.1.2.2 - Main_user.py TWELITE PAL Scriptのうち、データを読み込んだ後に行う処理を記述するコード
本コードにはデータを読み込んだ後のメインの処理を記述します。
ここでは、データを受け取った際に解釈したデータをコンソールに出力するコードを記述しています。
# この関数に処理したい内容を書く
def Main (PAL= None ):
# 渡された変数がAppPALクラスか確認する。
if isinstance(PAL, AppPAL):
sns_data = PAL. GetDataDict()
# 受信時間
print('Receive Time: ' , end= '' )
if isinstance(sns_data['ArriveTime' ], datetime. datetime):
print(sns_data['ArriveTime' ]. strftime('%Y/%m/ %d %H:%M:%S' ) + '. %03d ' % (sns_data['ArriveTime' ]. microsecond/ 1000 ))
else :
print(sns_data['ArriveTime' ])
# 論理デバイスID
print('Logical ID: 0x %02X ' % sns_data['LogicalID' ])
# シリアル番号
print('Serial ID: 0x' + sns_data['EndDeviceSID' ])
# 電源電圧
print('Power: %d mV' % sns_data['Power' ])
# センサーの名前を調べる
sname = PAL. GetSensorName()
# センサー名がPALだったらPAL/ARIA/CUE、モデル名を出力する。
if sname == 'PAL' :
pid = PAL. GetPALName()
print('Sensor: ' + pid )
else :
print('Sensor: ' + sname )
# アナログセンサーモード(App_Tag)
if sname == 'Analog' :
print('ADC1: %d mV' % sns_data['ADC1' ])
print('ADC2: %d mV' % sns_data['ADC2' ])
else :
# ホールIC
if 'HALLIC' in sns_data. keys():
print('HALLIC: %d ' % sns_data['HALLIC' ])
# 温度
if 'Temperature' in sns_data. keys():
print('Temperature: %.02f degC' % sns_data['Temperature' ])
# 湿度
if 'Humidity' in sns_data. keys():
print('Humidity: %.02f %% ' % sns_data['Humidity' ])
# 照度
if 'Illuminance' in sns_data. keys():
print('Illuminance: %f lux' % sns_data['Illuminance' ])
# 気圧
if 'Pressure' in sns_data. keys():
print('Pressure: %f hPa' % sns_data['Pressure' ])
# 加速度
if 'AccelerationX' in sns_data. keys():
print('X: ' , end= '' )
print(sns_data['AccelerationX' ])
print('Y: ' , end= '' )
print(sns_data['AccelerationY' ])
print('Z: ' , end= '' )
print(sns_data['AccelerationZ' ])
# ジャイロ
if 'Roll' in sns_data. keys():
print('Roll: ' , end= '' )
print(sns_data['Roll' ])
print('Pitch: ' , end= '' )
print(sns_data['Pitch' ])
print('Yaw: ' , end= '' )
print(sns_data['Yaw' ])
# カラーセンサー
if 'Red' in sns_data. keys():
print('Red: ' , end= '' )
print(sns_data['Red' ])
print('Green: ' , end= '' )
print(sns_data['Green' ])
print('Blue: ' , end= '' )
print(sns_data['Blue' ])
print('IR: ' , end= '' )
print(sns_data['IR' ])
print() 5.1.2.3 - MNLib TWELITE PAL Scriptのうち、シリアルデータの読み込みやそれを解釈するコード
TWELITE PAL Scriptのうち、シリアルデータの読み込みやそれを解釈するコードが入ったフォルダです。
5.1.2.3.1 - apppal.py 読み込んだバイト列を解釈して辞書オブジェクトに登録するクラス
Class AppPALAppBaseを継承し、得られたペイロードを解釈して、使いやすいデータに変換して、辞書オブジェクトに登録するクラスです。
定義するときのパラメータ 初期値が設定されているものは指定不要。
変数名 型 初期値 内容 port string None 開くシリアルポート名
例:COM3、/dev/ttyUSB0 など
baud int 115200 ボーレート tout float 0.1 シリアル通信するときのタイムアウト時間(秒) sformat string Ascii 本設定値はAsciiで固定 autolog boolean False ペイロードが解釈出来たときに自動でCSVファイルにログを出力する場合はTrue err boolean False エラーメッセージを出力する場合はTrue
ReadSensorData()本メソッドでペイロードを読み込んだら、 TWELITE PAL 親機の書式フォーマット に従ってそのペイロードの解釈を行います。
パラメータ なし
戻り値 データが読み込めた場合:True 読み込めなかった場合:False 辞書オブジェクトに格納されたデータのキーは下記の通りです。
EventIDなどのデータの意味に関しては、
こちら もご確認ください。
キー 型 内容 ArriveTime datetime ペイロードを得たときの時間 LogicalID int 子機の論理デバイスID EndDeviceSID int 子機のシリアル番号 RouterSID int 最初に受信した中継機のシリアル番号
(親機が直接子機のパケットを受信した場合は0x80000000)
LQI int 受信電波品質 SequenceNumber int パケットが送信されるごとにインクリメントされる続き番号
1からスタート、65535の次に0に戻る
Sensor int センサー種別(0x80で固定) PALID int PAL基板ID PALVersion int PAL基板バージョン HALLIC int ホールICの状態 Temperature float 温度(degC) Humidity float 湿度(%) Illuminance int 照度(lux) AccelerationX list,float X軸の加速度(g) AccelerationY list,float Y軸の加速度(g) AccelerationZ list,float Z軸の加速度(g) SamplingFrequency int 加速度のサンプリング周波数 EventID list,int イベントの要因とイベントID WakeupFactor list,int 起床した要因等のデータ
OutputCSV()辞書オブジェクトをCSVファイルに出力します。
パラメータ なし
戻り値 なし
5.1.2.3.2 - appbase.py シリアルデータ解釈のための基底クラス
class AppBase本コードでは、すべてのTWELITE APPS 共通で必要な機能が実装されており、シリアルデータの読み込みに必要なシリアルポートの開閉処理やシリアルデータの読み込み、ログファイルの出力などの処理が記述された基底クラスです。apppal.py が得られたバイト列を解釈し、辞書オブジェクトにデータを入れてメイン関数に返します。
GetDataDict()ペイロードの解釈し、データを格納した辞書オブジェクトを返します。
パラメータ なし
戻り値 型 内容 Dict ペイロードを解釈したデータを格納した辞書オブジェクト
5.1.2.3.3 - mwSerial.py シリアルポートの管理を行うクラス
Class MWSerial本クラスはシリアルの読み書きなど、シリアルポートの管理を行うクラスです。
定義するときのパラメータ 初期値が設定されているものは指定不要。
変数名 型 初期値 内容 port string None 開くシリアルポート名
例:COM3、/dev/ttyUSB0 など
baud int 115200 ボーレート timeout float 0.1 シリアル通信するときのタイムアウト時間(秒) parity int serial.PARITY_NONE パリティを指定する stop int 1 ストップビット byte int 8 データビット長 rtscts int 0 RTSとCTSを有効にする場合は1 dsrdtr int 0 DSRとDTRを有効にする場合は1 mode string Ascii 本設定値はAsciiで固定
SerialSelectPCに接続されたシリアルポートを検索し、使用するシリアルポートをユーザー選択します。
シリアルポートが1ポートしかない場合は自動的にそのポート名を使用します。
パラメータ 変数名 型 初期値 内容 portname string None 開くシリアルポート名 (例:COM3、/dev/ttyUSB0 など)
自動選択する場合は、指定しないこと。
戻り値 なし
5.1.2.3.4 - parseFmt.py parseFmt_*.py TWELITE シリアル書式パーサ
class FmtBase書式パーサーの基底クラスで共通手続きを定義する。これを継承した FmtAscii (アスキー形式 ASCII形式), FmtBinary (バイナリ形式 Binary形式) を利用する。
書式パーサーは、シリアル入力を想定し、アスキー形式の場合は1行単位でバイナリ形式の場合は1バイト単位で入力系列を解釈し、その系列が書式で定義されるヘッダ、フッタ、チェックサムを満足した時、解釈の完了とし、ヘッダ、フッタを除いた内容(ペイロード)を格納する。
process(c)入力文字列の解釈を行う。解釈後は is_complete() が true を返した場合、解釈が成功し get_payload() によりペイロードを得ることができる。ペイロードは続く process() 処理などを実行すると内容を保証しないため、解釈終了後に速やかに利用します。
続けて別の系列を解釈したい場合は、そのまま process() を実行する。
パラメータ パラメータ 内容 c解釈したい入力系列。1バイト単位の解釈と系列単位の解釈の2種類に対応する。1バイト単位の入力では、int型のアスキーコード、str型、bytes型、list型の長さ1の系列。系列単位の入力では list 型、str型、bytes型の1系列を処理する。データに複数系列ある場合や途中で切れている場合は処理できない。
戻り値 なし
is_comp()process() 処理後に呼び出し、書式解釈の完了状況を知らせる。true を得た場合は get_peyload() または get_payload_in_str() メソッドにより、ペイロードを取得する。
続く process() などの処理により、内部格納されるペイロードは初期化や破壊されるため、速やかにデータをコピーします。
パラメータ なし
戻り値 値 内容 true解釈に成功した。ペイロードが利用できる。 false解釈に失敗した、または、書式の途中である。
get_payload()ペイロードを返す。
パラメータ なし
戻り値 ヘッダやフッタが含まれないペイロード部を list型 バイト列として返します。
reinit()明示的に内部を初期状態にします。
パラメータ なし
戻り値 なし
その他メソッド 内部で利用する目的でいくつかのメソッドが定義されています。詳細はソースコードを参照してください。
コード例 系列単位の解釈 str 型の系列 a を解釈し、pay にペイロード情報保存します。pay には [ 0x78, 0x80, 0x01, ... , 0x00 ] が格納されます。
import parseFmt_Ascii
fmta= parseFmt_Ascii. FmtAscii()
a = ':7880010F0F0380030002800200DF'
pay = []
fmta. process(a)
if fmta. is_comp():
pay = fmta. get_payload() 1バイト単位の解釈
バイナリの系列 b について、1バイトごと process() メソッドにより系列の解釈を進めます。終端の 0x04 を投入した時点で、解釈が完了しペイロードが pay に保管されます。
import parseFmt_Binary
fmtb= parseFmt_Binary. FmtBinary()
b = [0xA5 , 0x5A , 0x80 , 0x05 , 0x78 , 0x00 , 0x11 , 0x22 , 0x33 , 0x78 , 0x04 ]
pay = []
for x in b:
fmtb. process(x)
if fmtb. is_comp():
pay = fmtb. get_payload()
break 5.2 - TWE Programmer Windows 専用の TWELITE 書き込みツール
TWE Programmer は TWELITE シリーズの無線マイコンへのファームウェアの書き込みや、ターミナル接続を行うためのユーティリティです。
導入方法 TWE-Programmer.exeをダウンロード
動作環境 以下の環境で開発し、動作を確認しております。
バージョン OS .NET v3.7.5 Windows 10 Pro 1809 v4.0.30319
Windows 11 においても動作した例が報告されています。
依存関係 FTDI社のドライバ TWELITE R や MONOSTICK に搭載されている FTDI 製シリアル変換ICのドライバ をインストールしなくてはならない場合がございます。
起動 一般のプログラムと同様に TWEProgrammer.exe をダブルクリックして起動します。
起動時に MONOSTICK や TWELITE R を検索します。複数のデバイスを接続しているときに開かれるものは指定できません。USBバスに様々なデバイスを接続していて起動できない場合は、ほかのデバイスを外してください。
起動後の画面の例
ファームウェアの書き込み COMポートの指定 TWELITE を接続した TWELITE R や MONOSTICK のCOMポートを選択します。
正常に TWELITE を認識すると、TWELITE の表面に刻印されているシリアル番号を表示します。
ファームウェアの指定 ボタンを押してファイルを選択するか、.binファイルをドラッグして読み込ませると、ファームウェアの書き込みを行えます。前に指定したファイルが存在する場合は、(再)書き込みボタンを押して書き込むこともできます。
書き込み中の画面の例
ターミナル接続する にチェックが入っていると、自動的に TWELITE をリセットし、ターミナル画面を表示します。
書き込み後の画面の例
オプション 低速書込(セーフモード)より安全な設定を適用します。通常は必要ありません。
ベリファイする書き込み後にデータの確認を行います。
ターミナルの接続 ボーレート設定 ターミナルの欄からボーレートを変更できます。8N1の設定が適用されます。
ターミナルの接続 書き込みを行わずターミナルだけを使用する場合は、ターミナル接続するをチェックした状態でTWELITE のリセットを押してください。
Alt+R を入力することで TWELITE をリセットできます。リセットせずにターミナルへ接続するには、Alt+Nを入力します。
始動時は自動的にプログラムモードへ遷移します。設定によりこの動作を省略できます。
ターミナルの切断 ターミナルを切断を押すか、Alt+Iを入力します。
ショートカット ターミナルでは Ctrl を多用するため、Altによるショートカットキーを設定しています。
操作内容 キー操作 備考 ターミナルを切断 Alt+Iまたは ターミナルを切断 ボタン ターミナルに接続(通常) Alt+Nリセットせず接続 ターミナルに接続(リセット) Alt+Rリセットして接続 ハードリセット Alt+R+++ を送信Alt+Pまたは + + + ボタン。 ターミナルの表示色を変更 Alt+G接続中のみ ターミナル表示をクリア Alt+Lまたは clear ボタン 表示内容をコピー Alt+Cまたは copy ボタン クリップボードからペースト Alt+Vファームウェアファイルを開く Ctrl+Alt+Oターミナルの接続中は無効 ファームウェアを再書き込み Ctrl+Alt+Wファームウェアを消去 Ctrl+Alt+Eターミナルの接続中は無効 ターミナルの描画方式を変更 Ctrl+Alt+Dダブルバッファ方式に切り替え。 TWE Programmer を終了 Ctrl+Alt+X
また、以下のエスケープシーケンスに対応しています。
操作内容 キー操作 カーソルを一行上へ移動 ESC[A]カーソルを行頭へ移動 ESC[G]カーソルをホームポジションへ移動 ESC[H画面クリア ESC[2JCR / カーソルを行頭へ戻す \r
ログ ターミナルの入出力を記録するには、接続前に ターミナルログを保存 へチェックを入れます。
TWE-Programmer.exeと同じ場所にテキストファイル twelog.log が追加モードで保存されます。
タイミングによって、入力と出力の記録が前後する場合があります。
複数のログを同時に取得したい場合は、TWE-Programmer.exe を別のフォルダに導入してください。
入出力の書式 以下の書式で保存されます。
文字列 解説 表示可能なASCII文字 バックスラッシュ\を除く バックスラッシュ\(0x5C) \\に変換その他 16進数で表記
PC から TWELITE への入力は、TWELITE の出力と区別するため、エスケープシーケンスを前後に挿入します。
入力の開始:ESC[7m] 入力の終了:ESC[0m]
このエスケープシーケンスは、ANSI ターミナルの反転表示にあたります。対応する端末で表示(less -r twelog.logなど)すれば、可読性を向上できます。
設定 起動時のコマンドラインオプションにより、いくつかの設定を行えます。
パラメータ 設定内容 -vベリファイを有効化 -c起動後の自動接続を無効化 -s低速書込(セーフモード)を有効化 -Dダブルバッファを有効化 -g [num]--color [num]文字色を指定(無効なら0)0: ピンク/ワイン1: オレンジ/黒2: 緑/黒3: 黒/白4: 白/ワイン5: ワイン/黄6: 白/青 [file]読み込むファームウェアを指定
プログラムのショートカットを作成し、プロパティからコマンドラインオプションを追加できます。
プロパティの画面の例
エラー出力 書き込み時にエラーが発生した場合は、以下のように画面がピンク色に変わります。接続を確認して、(再)書き込みを押してください。
書き込みに失敗した例
ほかのソフトウェアでCOMポートを使用している場合にも、エラーを出力します。COMポートを使っているソフトウェアを終了してから、接続再チェックを押してください。
接続に失敗した例
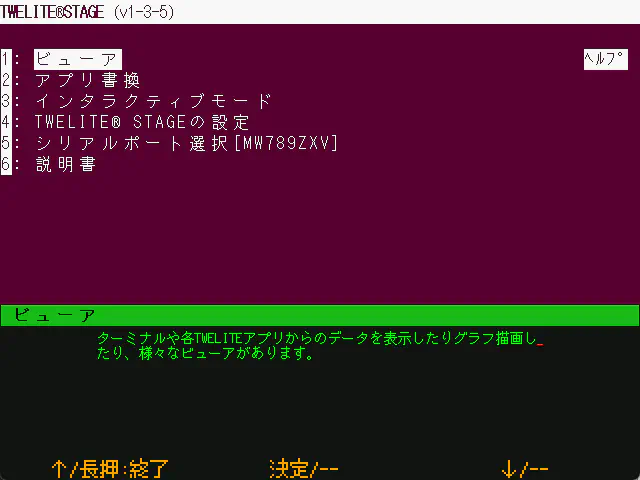
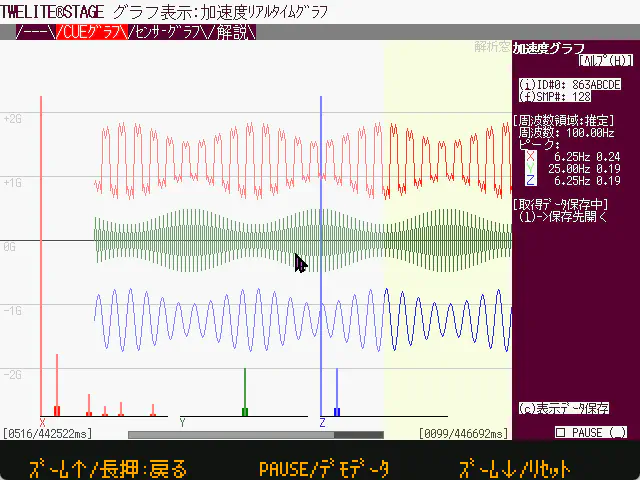
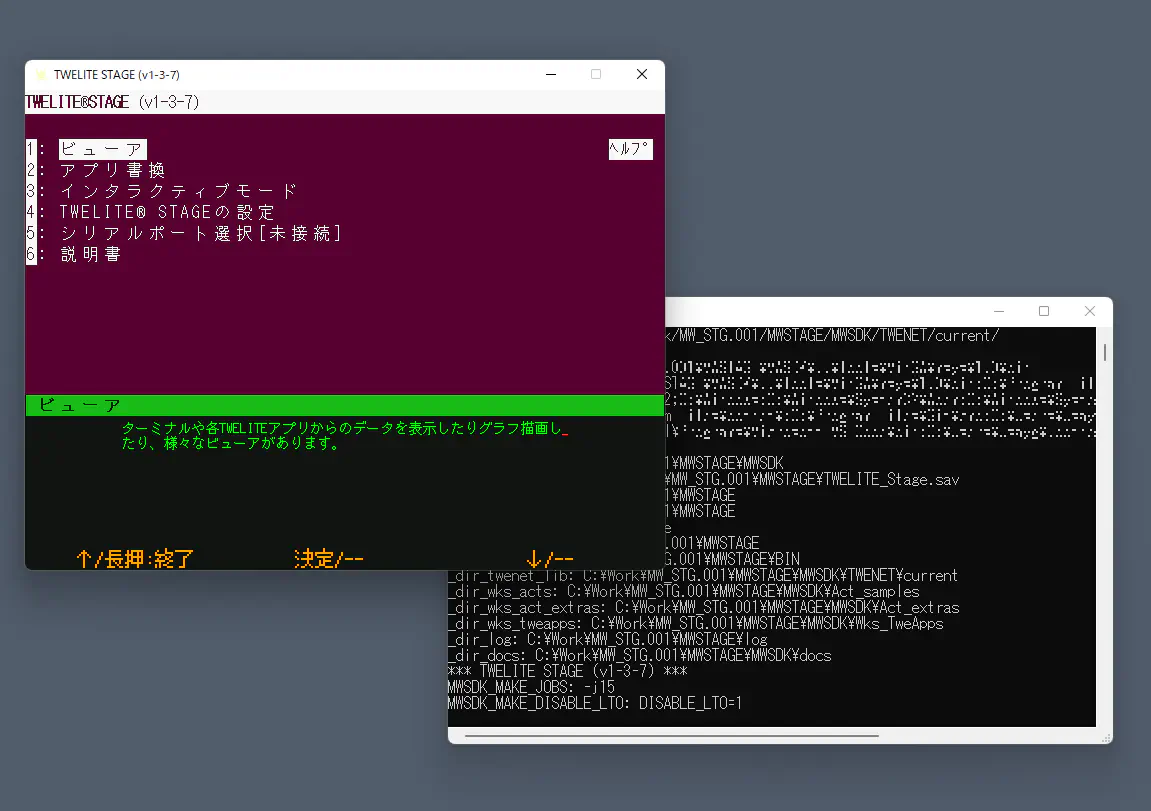
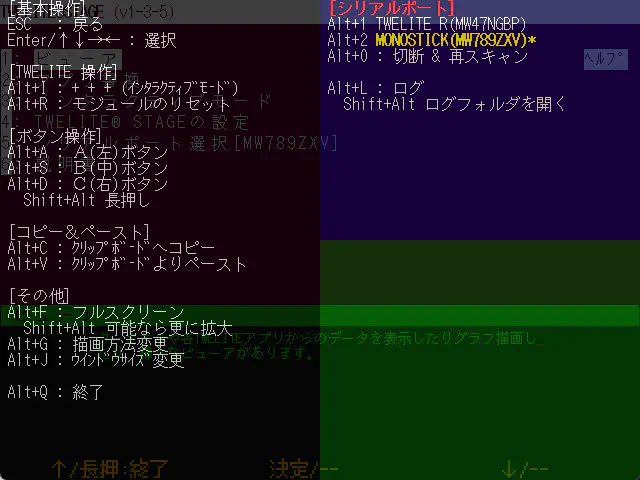
![画面下部の仮想[ B ]ボタンの表示例](../images/stage-app-abc-button.webp)