その他の製品やサービスのマニュアル
セクションの複数ページをまとめています。 印刷またはPDF形式で保存...
最適な出力のために、Google Chrome(15以降)または Microsoft Edge(79以降)を推奨いたします。
Miscellaneous
その他
- 1: TWELITE PAL/CUE/ARIA Script
- 1.1: 使用方法
- 1.2: ソースファイル
- 1.2.1: PAL_Script.py
- 1.2.2: Main_user.py
- 1.2.3: MNLib
- 1.2.3.1: apppal.py
- 1.2.3.2: appbase.py
- 1.2.3.3: mwSerial.py
- 1.2.3.4: parseFmt.py parseFmt_*.py
- 2: TWE Programmer
1 - TWELITE PAL/CUE/ARIA Script
TWELITE SENSE PALなどからのデータを処理するPythonスクリプト
新しいライブラリ MWings for Python をご検討ください。
パルシリーズ以外の TWELITE へ対応したほか、JSON や pandas データフレーム等を出力できます。
TWELITE PAL Script は、TWELITE SENSE PAL (センサーパル), TWELITE CUE (加速度センサー・磁気センサー), TWELITE ARIA (温湿度センサー・磁気センサー) からのデータの解釈、ログ記録するためのサンプルスクリプトです。
本アプリケーションは参考として提供されています。
- 本アプリケーションならびに本ドキュメントは無保証です。
- 予告無く仕様が変更されます。
- モノワイヤレス ソフトウェア使用許諾 (MW-SLA-1J/E) に基づきます。
1.1 - 使用方法
TWELITE PAL Scriptの使用方法
TWELITE PALとMONOSTICKを使う場合の使用方法をご案内いたします。
PCの準備
ダウンロードしたアーカイブをわかりやすいフォルダ(例えばC:) に解凍する。
下記WebページよりPCの環境にあったAnacondaをダウンロードし、インストールする。
https://www.anaconda.com/download/
Anacondaをインストールしたくない場合は”Anacondaをインストールしない場合”を参照Anaconda Promptを立ち上げ、下記コマンドを実行しpyserialをインストールする。 (Windowsの場合、Anaconda Promptは スタートメニュー → Anaconda3 内にあるのでそちらから立ち上げること。)
pip install pyserial
Anacondaをインストールしない場合
下記のインストール手順はOSがWindowsの場合の一例です。 各種ライブラリのドキュメントをご覧の上、必要なソフトウェアおよびライブラリをインストールしてください。
下記ページよりPythonの最新版をダウンロードしインストールする。
https://www.python.org/downloads/
その時、下図の枠で囲まれている部分にチェックを入れること
もしくはPythonのインストール先にPathを通すこと。
コマンドプロンプトを立ち上げ、下記コマンドを入力しpyserialをインストールする。
pip install pyserial
TWELITE PAL の準備
- BLUE PAL/RED PALにSENSE PALを接続する。
- BLUE PAL/RED PALの電池ホルダーにコイン型電池(CR2032)を挿入する。
MONOSTICK の準備
- MONOSTICKのアプリ(App_PAL-Parent-xxx-MONOSTICK.bin)を書き換える。
- MONOSTICKをリセットもしくはUSBポートに差しなおす。
スクリプトの実行方法
MONOSTICKのCOMポートがCOM6の場合、Anaconda Promptで下記コマンドを実行すると下記のようなデータが出力されます。(Teratermが接続された状態では起動できません。)
cd C:\PAL_Script
python PAL_Script.py -t COM6
*** MONOWIRELESS App_PAL_Viewer 1.1.0 ***
*** Open COM6 ***
ArriveTime : 2021/03/05 09:43:28.880
LogicalID : 1
EndDeviceSID : 10B6465
RouterSID : No Relay
LQI : 180 (-35.50 [dBm])
…
スクリプトを終了させるにはAnaconda PromptでCtrl+Cを入力してください。
スクリプトの引数
スクリプト実行時に以下の引数を使用できます。
引数:-h
機能:コマンドライン引数の一覧を表示
使用例:python PAL_Script.py -h
引数:-t
機能:MONOSTICKが使用するポート名を指定
設定項目:MONOSTICKのポート名
初期値:Windowsの場合:COM3、Linuxなどの場合:/dev/ttyUSB0
使用例:python PAL_Script.py -t COM6
引数:-b
機能:MONOSTICKが使用するポートのボーレートを指定
設定項目:MONOSTICKのボーレート
初期値:115200
使用例:python PAL_Script.py -t COM6 -b 115200
引数:-l
機能:CSV形式のログを出力
使用例:python PAL_Script.py -t COM6 -l
備考:同一ディレクトリ内にCSVファイルが生成される。
ファイル名はAppPAL_シリアル番号_PAL_YYYYMMDD.csv
CSVファイルの読み方は下記表の通りです。
| 見出し | 値の説明 | 単位 |
|---|---|---|
| LogicalID | 子機の論理デバイスID | - |
| EndDeviceSID | 子機のシリアルナンバー | - |
| LQI | LQI | - |
| Power | 電源電圧 | mV |
| ADC* | 電圧 | mV |
| HALLIC | マグネットセンサーの状態 | - |
| Temperature | 温度 | ℃ |
| Humidity | 湿度 | % |
| Illuminance | 照度 | Lux |
AccelerationX | 加速度 | g |
1.2 - ソースファイル
TWELITE PAL Scriptのソースファイル
動作環境
以下の環境で動作確認を行いました。
- Windows10 Bulid 1809
- Python 3.6.4
- pyserial 3.4
- Python 3.6.4
1.2.1 - PAL_Script.py
TWELITE PAL Scriptの実行用スクリプト
本スクリプトを起動するためのコードで、MONOSTICKからのデータを読み込み、解釈されたデータの標準出力を行います。
読み出し方法
以下のコード例では、都度 MONOSTICK からデータを受信したかどうかを確認し、受信していればMain()に渡す処理を行っています。
from apppal import AppPAL
...
def mainloop(PAL):
global end_flag
try:
from Main_user import Main
except:
mainflag = False
else:
mainflag = True
if PAL.ReadSensorData():
if mainflag:
Main(PAL)
else:
PAL.ShowSensorData()
...
if __name__ == '__main__':
...
try:
PAL = AppPAL(port=options.target, baud=options.baud, tout=0.05, sformat=options.format, autolog=bEnableLog, err=bEnableErrMsg, stdinput=options.stdinp, Logfilename=options.file)
except:
print("Cannot open \"AppPAL\" class...")
exit(1)
while True:
try:
mainloop(PAL)
except KeyboardInterrupt:
break
del PAL
まず、AppPALオブジェクトを生成します。オブジェクト生成時にシリアルポートの設定も行うため、シリアルポートの設定パラメータを引数として渡します。
PPAL = AppPAL(port=options.target, baud=options.baud, tout=0.05, sformat=options.format, autolog=bEnableLog, err=bEnableErrMsg, stdinput=options.stdinp, Logfilename=options.file)
次にmainloop()でシリアルデータが来ているかどうかを判断するために ReadSensorData() を呼びます。返り値が True だったら、解釈したをMain()に渡します。
def mainloop(PAL):
# ユーザが処理を記述するMain関数がインポートできるか確認する。
try:
from Main_user import Main
except:
mainflag = False
else:
mainflag = True
# データがあるかどうかの確認
if PAL.ReadSensorData():
if mainflag:
# Main関数が読めたらPALオブジェクトをMain()に渡す
Main(PAL)
else:
# Main関数が読めなかったらコンソールにデータを表示する。
PAL.ShowSensorData()
受け取る辞書に関してはこちらを参照してください。
1.2.2 - Main_user.py
TWELITE PAL Scriptのうち、データを読み込んだ後に行う処理を記述するコード
本コードにはデータを読み込んだ後のメインの処理を記述します。
ここでは、データを受け取った際に解釈したデータをコンソールに出力するコードを記述しています。
# この関数に処理したい内容を書く
def Main(PAL=None):
# 渡された変数がAppPALクラスか確認する。
if isinstance(PAL, AppPAL):
sns_data = PAL.GetDataDict()
# 受信時間
print('Receive Time: ', end='')
if isinstance(sns_data['ArriveTime'], datetime.datetime):
print(sns_data['ArriveTime'].strftime('%Y/%m/%d %H:%M:%S') + '.%03d'%(sns_data['ArriveTime'].microsecond/1000))
else:
print(sns_data['ArriveTime'])
# 論理デバイスID
print('Logical ID: 0x%02X'%sns_data['LogicalID'])
# シリアル番号
print('Serial ID: 0x' + sns_data['EndDeviceSID'])
# 電源電圧
print('Power: %d mV' % sns_data['Power'])
# センサーの名前を調べる
sname = PAL.GetSensorName()
# センサー名がPALだったらPAL/ARIA/CUE、モデル名を出力する。
if sname == 'PAL':
pid = PAL.GetPALName()
print('Sensor: ' + pid )
else:
print('Sensor: ' + sname )
# アナログセンサーモード(App_Tag)
if sname == 'Analog':
print('ADC1: %d mV'%sns_data['ADC1'])
print('ADC2: %d mV'%sns_data['ADC2'])
else:
# ホールIC
if 'HALLIC' in sns_data.keys():
print('HALLIC: %d'%sns_data['HALLIC'])
# 温度
if 'Temperature' in sns_data.keys():
print('Temperature: %.02f degC'%sns_data['Temperature'])
# 湿度
if 'Humidity' in sns_data.keys():
print('Humidity: %.02f %%'%sns_data['Humidity'])
# 照度
if 'Illuminance' in sns_data.keys():
print('Illuminance: %f lux'%sns_data['Illuminance'])
# 気圧
if 'Pressure' in sns_data.keys():
print('Pressure: %f hPa'%sns_data['Pressure'])
# 加速度
if 'AccelerationX' in sns_data.keys():
print('X: ', end='')
print(sns_data['AccelerationX'])
print('Y: ', end='')
print(sns_data['AccelerationY'])
print('Z: ', end='')
print(sns_data['AccelerationZ'])
# ジャイロ
if 'Roll' in sns_data.keys():
print('Roll: ', end='')
print(sns_data['Roll'])
print('Pitch: ', end='')
print(sns_data['Pitch'])
print('Yaw: ', end='')
print(sns_data['Yaw'])
# カラーセンサー
if 'Red' in sns_data.keys():
print('Red: ', end='')
print(sns_data['Red'])
print('Green: ', end='')
print(sns_data['Green'])
print('Blue: ', end='')
print(sns_data['Blue'])
print('IR: ', end='')
print(sns_data['IR'])
print()
1.2.3 - MNLib
TWELITE PAL Scriptのうち、シリアルデータの読み込みやそれを解釈するコード
TWELITE PAL Scriptのうち、シリアルデータの読み込みやそれを解釈するコードが入ったフォルダです。
1.2.3.1 - apppal.py
読み込んだバイト列を解釈して辞書オブジェクトに登録するクラス
Class AppPAL
AppBaseを継承し、得られたペイロードを解釈して、使いやすいデータに変換して、辞書オブジェクトに登録するクラスです。
定義するときのパラメータ
初期値が設定されているものは指定不要。
| 変数名 | 型 | 初期値 | 内容 |
|---|---|---|---|
| port | string | None | 開くシリアルポート名 例:COM3、/dev/ttyUSB0 など |
| baud | int | 115200 | ボーレート |
| tout | float | 0.1 | シリアル通信するときのタイムアウト時間(秒) |
| sformat | string | Ascii | 本設定値はAsciiで固定 |
| autolog | boolean | False | ペイロードが解釈出来たときに自動でCSVファイルにログを出力する場合はTrue |
| err | boolean | False | エラーメッセージを出力する場合はTrue |
ReadSensorData()
本メソッドでペイロードを読み込んだら、 TWELITE PAL 親機の書式フォーマット に従ってそのペイロードの解釈を行います。
TWELITE PAL 親機の書式フォーマット (ASCII形式のみ) を解釈しています。多くはその定義に従います。
パラメータ
なし
戻り値
- データが読み込めた場合:
True - 読み込めなかった場合:
False
辞書オブジェクトに格納されたデータのキーは下記の通りです。
EventIDなどのデータの意味に関しては、こちらもご確認ください。
| キー | 型 | 内容 |
|---|---|---|
| ArriveTime | datetime | ペイロードを得たときの時間 |
| LogicalID | int | 子機の論理デバイスID |
| EndDeviceSID | int | 子機のシリアル番号 |
| RouterSID | int | 最初に受信した中継機のシリアル番号 (親機が直接子機のパケットを受信した場合は0x80000000) |
| LQI | int | 受信電波品質 |
| SequenceNumber | int | パケットが送信されるごとにインクリメントされる続き番号 1からスタート、65535の次に0に戻る |
| Sensor | int | センサー種別(0x80で固定) |
| PALID | int | PAL基板ID |
| PALVersion | int | PAL基板バージョン |
| HALLIC | int | ホールICの状態 |
| Temperature | float | 温度(degC) |
| Humidity | float | 湿度(%) |
| Illuminance | int | 照度(lux) |
| AccelerationX | list,float | X軸の加速度(g) |
| AccelerationY | list,float | Y軸の加速度(g) |
| AccelerationZ | list,float | Z軸の加速度(g) |
| SamplingFrequency | int | 加速度のサンプリング周波数 |
| EventID | list,int | イベントの要因とイベントID |
| WakeupFactor | list,int | 起床した要因等のデータ |
OutputCSV()
辞書オブジェクトをCSVファイルに出力します。
パラメータ
なし
戻り値
なし
1.2.3.2 - appbase.py
シリアルデータ解釈のための基底クラス
class AppBase
本コードでは、すべてのTWELITE APPS 共通で必要な機能が実装されており、シリアルデータの読み込みに必要なシリアルポートの開閉処理やシリアルデータの読み込み、ログファイルの出力などの処理が記述された基底クラスです。
これを継承した apppal.py が得られたバイト列を解釈し、辞書オブジェクトにデータを入れてメイン関数に返します。
GetDataDict()
ペイロードの解釈し、データを格納した辞書オブジェクトを返します。
パラメータ
なし
戻り値
| 型 | 内容 |
|---|---|
| Dict | ペイロードを解釈したデータを格納した辞書オブジェクト |
1.2.3.3 - mwSerial.py
シリアルポートの管理を行うクラス
Class MWSerial
本クラスはシリアルの読み書きなど、シリアルポートの管理を行うクラスです。
定義するときのパラメータ
初期値が設定されているものは指定不要。
| 変数名 | 型 | 初期値 | 内容 |
|---|---|---|---|
| port | string | None | 開くシリアルポート名 例:COM3、/dev/ttyUSB0 など |
| baud | int | 115200 | ボーレート |
| timeout | float | 0.1 | シリアル通信するときのタイムアウト時間(秒) |
| parity | int | serial.PARITY_NONE | パリティを指定する |
| stop | int | 1 | ストップビット |
| byte | int | 8 | データビット長 |
| rtscts | int | 0 | RTSとCTSを有効にする場合は1 |
| dsrdtr | int | 0 | DSRとDTRを有効にする場合は1 |
| mode | string | Ascii | 本設定値はAsciiで固定 |
SerialSelect
PCに接続されたシリアルポートを検索し、使用するシリアルポートをユーザー選択します。
シリアルポートが1ポートしかない場合は自動的にそのポート名を使用します。
シリアルポートがない場合はNoneを指定します。
シリアルポート名を引数に指定した場合はそのシリアルポートを使用します。
パラメータ
| 変数名 | 型 | 初期値 | 内容 |
|---|---|---|---|
| portname | string | None | 開くシリアルポート名 (例:COM3、/dev/ttyUSB0 など) 自動選択する場合は、指定しないこと。 |
戻り値
なし
1.2.3.4 - parseFmt.py parseFmt_*.py
TWELITE シリアル書式パーサ
class FmtBase
書式パーサーの基底クラスで共通手続きを定義する。これを継承した FmtAscii (アスキー形式 ASCII形式), FmtBinary (バイナリ形式 Binary形式) を利用する。
書式パーサーは、シリアル入力を想定し、アスキー形式の場合は1行単位でバイナリ形式の場合は1バイト単位で入力系列を解釈し、その系列が書式で定義されるヘッダ、フッタ、チェックサムを満足した時、解釈の完了とし、ヘッダ、フッタを除いた内容(ペイロード)を格納する。
process(c)
入力文字列の解釈を行う。解釈後は is_complete() が true を返した場合、解釈が成功し get_payload() によりペイロードを得ることができる。ペイロードは続く process() 処理などを実行すると内容を保証しないため、解釈終了後に速やかに利用します。
続けて別の系列を解釈したい場合は、そのまま process() を実行する。
パラメータ
| パラメータ | 内容 |
|---|---|
c | 解釈したい入力系列。1バイト単位の解釈と系列単位の解釈の2種類に対応する。1バイト単位の入力では、int型のアスキーコード、str型、bytes型、list型の長さ1の系列。系列単位の入力では list 型、str型、bytes型の1系列を処理する。データに複数系列ある場合や途中で切れている場合は処理できない。 |
戻り値
なし
is_comp()
process() 処理後に呼び出し、書式解釈の完了状況を知らせる。true を得た場合は get_peyload() または get_payload_in_str() メソッドにより、ペイロードを取得する。
続く
process() などの処理により、内部格納されるペイロードは初期化や破壊されるため、速やかにデータをコピーします。パラメータ
なし
戻り値
| 値 | 内容 |
|---|---|
true | 解釈に成功した。ペイロードが利用できる。 |
false | 解釈に失敗した、または、書式の途中である。 |
get_payload()
ペイロードを返す。
パラメータ
なし
戻り値
ヘッダやフッタが含まれないペイロード部を list型 バイト列として返します。
reinit()
明示的に内部を初期状態にします。
パラメータ
なし
戻り値
なし
その他メソッド
内部で利用する目的でいくつかのメソッドが定義されています。詳細はソースコードを参照してください。
コード例
系列単位の解釈
str 型の系列 a を解釈し、pay にペイロード情報保存します。pay には [ 0x78, 0x80, 0x01, ... , 0x00 ] が格納されます。
import parseFmt_Ascii
fmta=parseFmt_Ascii.FmtAscii()
a = ':7880010F0F0380030002800200DF'
pay = []
fmta.process(a)
if fmta.is_comp():
pay = fmta.get_payload()
1バイト単位の解釈
バイナリの系列 b について、1バイトごと process() メソッドにより系列の解釈を進めます。終端の 0x04 を投入した時点で、解釈が完了しペイロードが pay に保管されます。
import parseFmt_Binary
fmtb=parseFmt_Binary.FmtBinary()
b = [0xA5, 0x5A, 0x80, 0x05, 0x78, 0x00, 0x11, 0x22, 0x33, 0x78, 0x04]
pay = []
for x in b:
fmtb.process(x)
if fmtb.is_comp():
pay = fmtb.get_payload()
break
2 - TWE Programmer
Windows 専用の TWELITE 書き込みツール
TWE Programmer は TWELITE シリーズの無線マイコンへのファームウェアの書き込みや、ターミナル接続を行うためのユーティリティです。
TWELITE STAGE アプリをご検討ください。ビルド機能を備え、マルチプラットフォームに対応しています。
導入方法
TWE-Programmer.exeをダウンロードしてから、任意の場所にコピーしてください。
動作環境
以下の環境で開発し、動作を確認しております。
| バージョン | OS | .NET |
|---|---|---|
| v3.7.5 | Windows 10 Pro 1809 | v4.0.30319 |
Windows 11 においても動作した例が報告されています。
依存関係
FTDI社のドライバ
TWELITE R や MONOSTICK に搭載されている FTDI 製シリアル変換ICのドライバをインストールしなくてはならない場合がございます。
起動
一般のプログラムと同様に TWEProgrammer.exe をダブルクリックして起動します。
起動時に MONOSTICK や TWELITE R を検索します。複数のデバイスを接続しているときに開かれるものは指定できません。USBバスに様々なデバイスを接続していて起動できない場合は、ほかのデバイスを外してください。
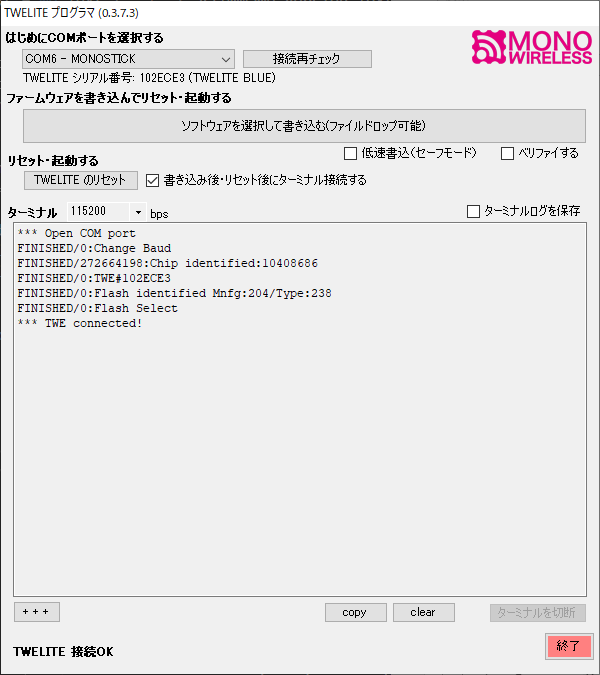
起動後の画面の例
ファームウェアの書き込み
COMポートの指定
TWELITE を接続した TWELITE R や MONOSTICK のCOMポートを選択します。
正常に TWELITE を認識すると、TWELITE の表面に刻印されているシリアル番号を表示します。
ファームウェアの指定
ボタンを押してファイルを選択するか、.binファイルをドラッグして読み込ませると、ファームウェアの書き込みを行えます。前に指定したファイルが存在する場合は、(再)書き込みボタンを押して書き込むこともできます。
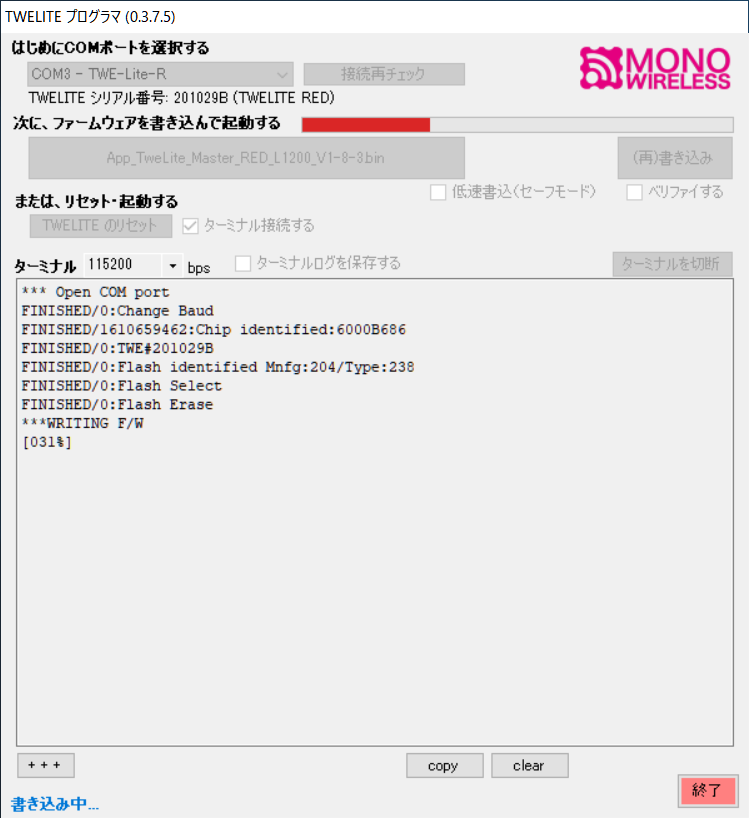
書き込み中の画面の例
ターミナル接続する にチェックが入っていると、自動的に TWELITE をリセットし、ターミナル画面を表示します。
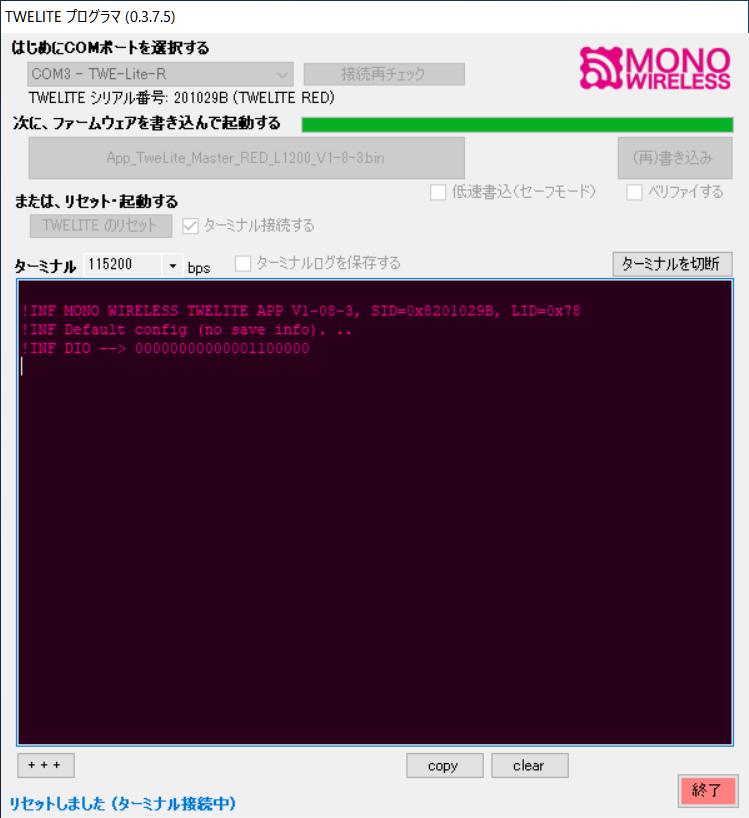
書き込み後の画面の例
オプション
低速書込(セーフモード)
より安全な設定を適用します。通常は必要ありません。
ベリファイする
書き込み後にデータの確認を行います。
ターミナルの接続
ボーレート設定
ターミナルの欄からボーレートを変更できます。8N1の設定が適用されます。
ターミナルの接続
書き込みを行わずターミナルだけを使用する場合は、ターミナル接続するをチェックした状態でTWELITE のリセットを押してください。
Alt+R を入力することで TWELITE をリセットできます。リセットせずにターミナルへ接続するには、Alt+Nを入力します。始動時は自動的にプログラムモードへ遷移します。設定によりこの動作を省略できます。
ターミナルの切断
ターミナルを切断を押すか、Alt+Iを入力します。
ショートカット
ターミナルでは Ctrl を多用するため、Altによるショートカットキーを設定しています。
| 操作内容 | キー操作 | 備考 |
|---|---|---|
| ターミナルを切断 | Alt+I | または ターミナルを切断 ボタン |
| ターミナルに接続(通常) | Alt+N | リセットせず接続 |
| ターミナルに接続(リセット) | Alt+R | リセットして接続 |
| ハードリセット | Alt+R | |
+++ を送信 | Alt+P | または + + + ボタン。インタラクティブモードへの遷移用 |
| ターミナルの表示色を変更 | Alt+G | 接続中のみ |
| ターミナル表示をクリア | Alt+L | または clear ボタン |
| 表示内容をコピー | Alt+C | または copy ボタン |
| クリップボードからペースト | Alt+V | |
| ファームウェアファイルを開く | Ctrl+Alt+O | ターミナルの接続中は無効 |
| ファームウェアを再書き込み | Ctrl+Alt+W | |
| ファームウェアを消去 | Ctrl+Alt+E | ターミナルの接続中は無効 |
| ターミナルの描画方式を変更 | Ctrl+Alt+D | ダブルバッファ方式に切り替え。 カーソル非表示、描画乱れの可能性あり |
| TWE Programmer を終了 | Ctrl+Alt+X |
また、以下のエスケープシーケンスに対応しています。
| 操作内容 | キー操作 |
|---|---|
| カーソルを一行上へ移動 | ESC[A] |
| カーソルを行頭へ移動 | ESC[G] |
| カーソルをホームポジションへ移動 | ESC[H |
| 画面クリア | ESC[2J |
| CR / カーソルを行頭へ戻す | \r |
ログ
ターミナルの入出力を記録するには、接続前に ターミナルログを保存 へチェックを入れます。
長期間の記録は想定しておりません。
TWE-Programmer.exeと同じ場所にテキストファイル twelog.log が追加モードで保存されます。
タイミングによって、入力と出力の記録が前後する場合があります。
複数のログを同時に取得したい場合は、TWE-Programmer.exe を別のフォルダに導入してください。
入出力の書式
以下の書式で保存されます。
| 文字列 | 解説 |
|---|---|
| 表示可能なASCII文字 | バックスラッシュ\を除く |
バックスラッシュ\(0x5C) | \\に変換 |
| その他 | 16進数で表記 |
PC から TWELITE への入力は、TWELITE の出力と区別するため、エスケープシーケンスを前後に挿入します。
- 入力の開始:
ESC[7m] - 入力の終了:
ESC[0m]
このエスケープシーケンスは、ANSI ターミナルの反転表示にあたります。対応する端末で表示(
less -r twelog.logなど)すれば、可読性を向上できます。設定
起動時のコマンドラインオプションにより、いくつかの設定を行えます。
| パラメータ | 設定内容 |
|---|---|
-v | ベリファイを有効化 |
-c | 起動後の自動接続を無効化 |
-s | 低速書込(セーフモード)を有効化 |
-D | ダブルバッファを有効化 ちらつきを抑制するが、 カーソル非表示などの制約あり |
-g [num]--color [num] | 文字色を指定(無効なら0)0: ピンク/ワイン1: オレンジ/黒2: 緑/黒3: 黒/白4: 白/ワイン5: ワイン/黄6: 白/青 |
[file] | 読み込むファームウェアを指定 |
プログラムのショートカットを作成し、プロパティからコマンドラインオプションを追加できます。

プロパティの画面の例
エラー出力
書き込み時にエラーが発生した場合は、以下のように画面がピンク色に変わります。接続を確認して、(再)書き込みを押してください。
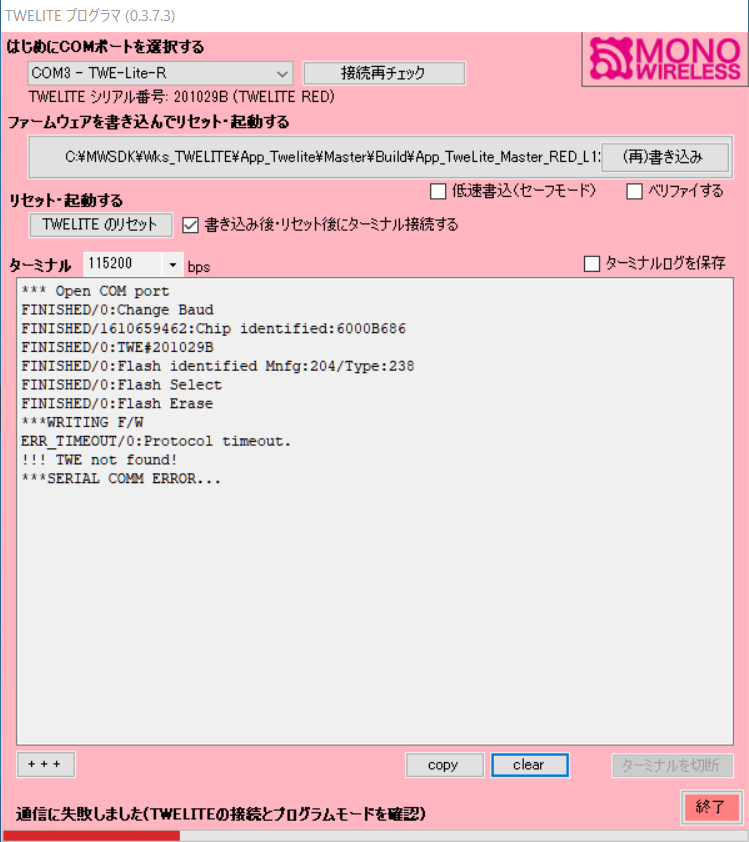
書き込みに失敗した例
ほかのソフトウェアでCOMポートを使用している場合にも、エラーを出力します。COMポートを使っているソフトウェアを終了してから、接続再チェックを押してください。
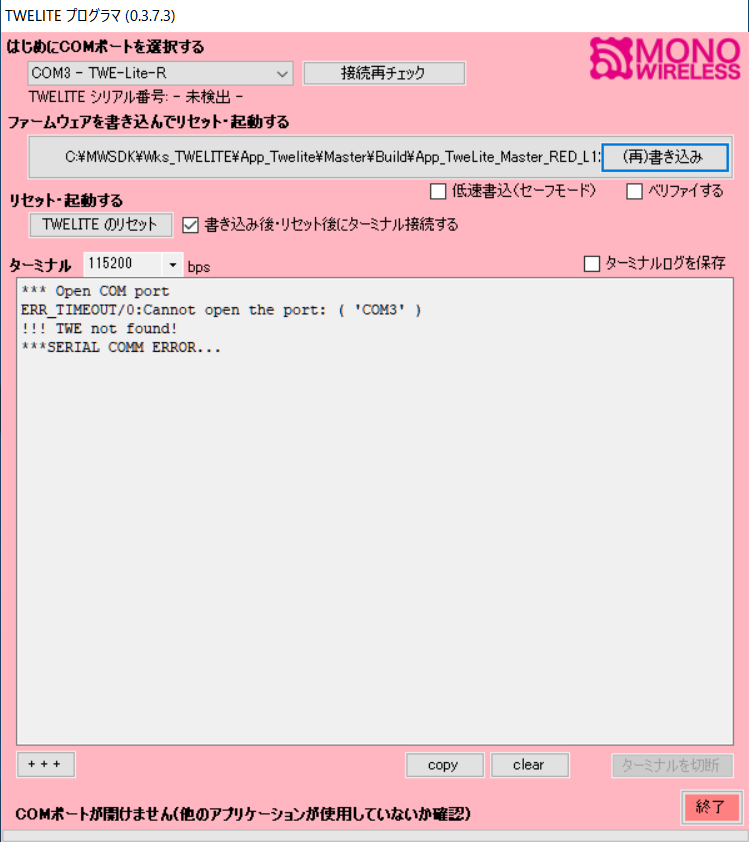
接続に失敗した例