親機と子機の入出力状態がシンクロ(同期)します。デジタル4ポート、アナログ4ポート、シリアル、I2Cを使用出来るオールインパッケージです。多彩な機能を単純化してわかりやすい反面、処理速度や応答性、省電力性は追求していません。
セクションの複数ページをまとめています。 印刷またはPDF形式で保存...
最適な出力のために、Google Chrome(15以降)または Microsoft Edge(79以降)を推奨いたします。
超簡単!標準アプリ マニュアル
デジタル・アナログ信号伝送
- 1: 超簡単!標準アプリ マニュアル
- 1.1: 超簡単!標準アプリのピン配置
- 1.2: 超簡単!標準アプリの動作モード
- 1.3: 超簡単!標準アプリの代替ボーレート設定
- 1.4: 超簡単!標準アプリのUART機能
- 1.5: インタラクティブモード(超簡単!標準アプリ)
1 - 超簡単!標準アプリ マニュアル
最新版
資料に関する注意事項をご覧ください。
お気付きの点がございましたら、当社サポート窓口へお問い合わせください。
工場出荷時の TWELITE や TWELITE DIP へインストールされています。
ダウンロード
超簡単!標準アプリ(App_Twelite)を導入するには TWELITE STAGE SDK をインストールして、TWELITE STAGE アプリを使って書き換えてください。
1.1 - 超簡単!標準アプリのピン配置
超簡単!標準アプリが使用するピンの機能
超簡単!標準アプリ(App_Twelite)が使用するピンの機能とその配置
ピン配置
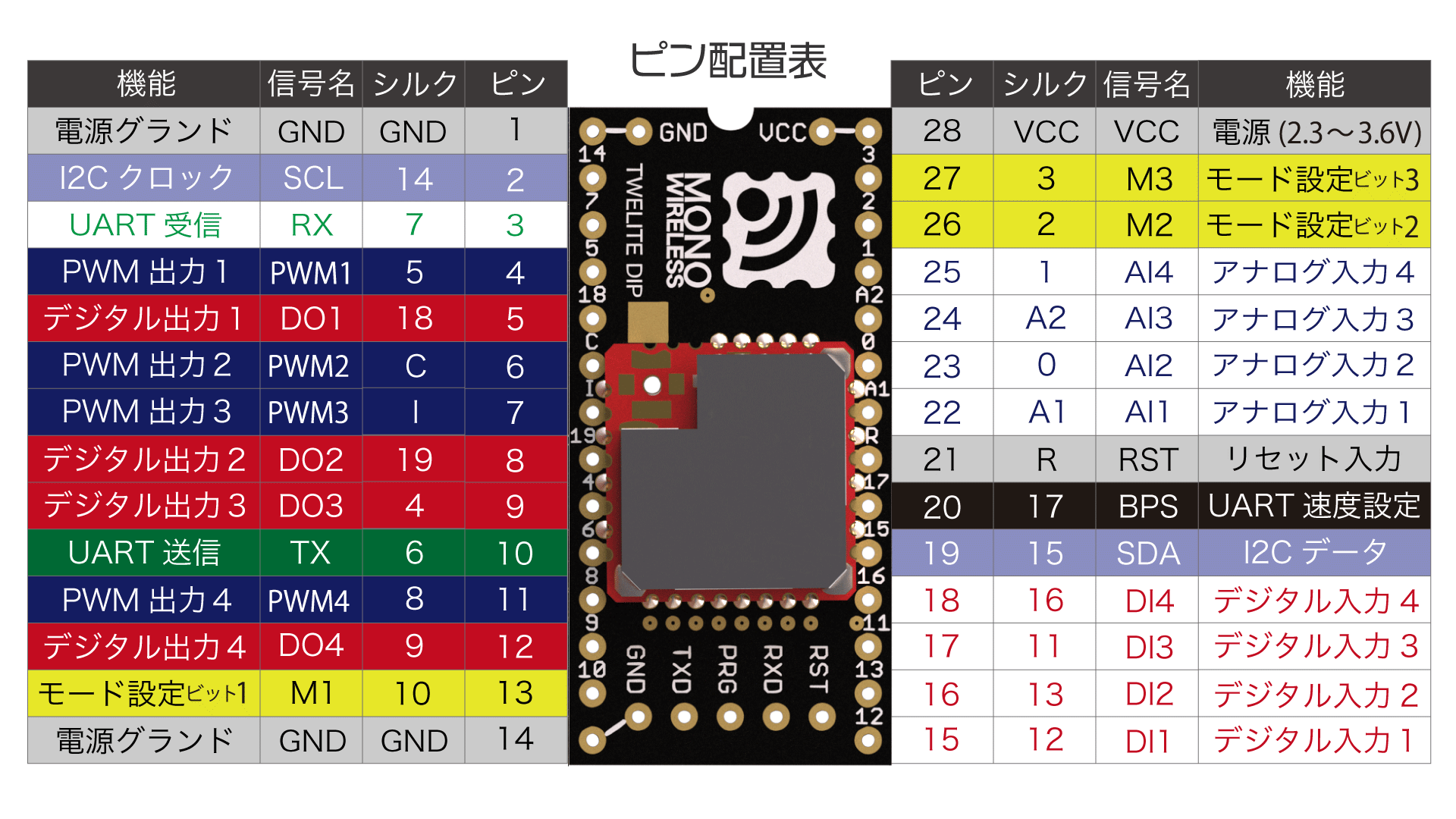
ピン配置表
| ピン名 | 機能 |
|---|---|
VCC GND | 電源入力 |
DIx AIx | デジタル・アナログ入力 |
DOx PWMx | デジタル・アナログ出力 |
TX RX | UART |
SCL SDA | I2C |
Mx BPS | 設定入力 |
RST | リセット入力 |
xは任意の数字を表します。例えば、M1 M2 M3 の総称を Mx と表しています。電源入力
VCC/GND には、3.3V(2.3-3.6V)の電源を接続します。
デジタル・アナログ入出力
DIx/DOx, AIx/PWMx ピンは、対応する番号のピンが同期して信号伝送を行います。
| デジタル | アナログ |
|---|---|
DIxの入力→DOxの出力 | AIxの入力→PWMxの出力 |
デジタル入力は内部プルアップされています。
超簡単!標準アプリでは、アナログ入力の電圧範囲を 0-2V としています。
VCCへ接続するなど、2V以上の電圧を入力した際は未使用扱いとなります。
シリアル通信
UART
TX/RX は、UART 通信の送信と受信に使用します。具体的には、次のような場面で使用します。
- 無線による信号伝送
- UART の信号伝送
- I2C の信号伝送(親機側)
- 外部デバイスとの有線通信
- ファームウェアの管理
- ファームウェアの設定変更(インタラクティブモード)
- ファームウェアの書き換え
I2C
SCL/SDAピンは、I2C のターゲットデバイスを接続する際に使用します。
設定入力
Mxピンを未接続またはGNDへ接続することで、親機、子機、中継機といった動作モードを切り替えることができます。
BPSピンを未接続またはGNDへ接続することで、UART のボーレート(通信速度)を 115200bps 以外の値へ変更できます。
リセット入力
リセット入力ピン RST と GNDとの間にプッシュボタンを接続することで、リセットボタンを実装できます。RST は内部プルアップされています。
1.2 - 超簡単!標準アプリの動作モード
各動作モードの説明
超簡単!標準アプリ(App_Twelite)には、7つの動作モードがあります。
動作モードの一覧
各モードは、Mx ピンを未接続または GND へ接続することで設定します。
M3 | M2 | M1 | モード | 機能 | 省電力 | LID |
|---|---|---|---|---|---|---|
| O | O | O | 子機: | 入力状態を親機へ | 120 | |
| O | O | G | 親機: | 入力状態を子機へ | 0 | |
| O | G | O | 中継機: | 122 | ||
| O | G | G | 子機: | 頻繁に入力状態を親機へ | 123 | |
| G | O | O | 子機: | 1秒おきに入力状態を親機へ | ✅ | 124 |
| G | O | G | 子機: | 1秒おきに入力状態を親機へ | ✅ | 125 |
| G | G | O | - | 未使用 | - | - |
| G | G | G | 子機: | 10秒おきに入力状態を親機へ | ✅ | 127 |
O:未接続(OPEN)、G:
GNDへ接続
初期状態は子機:連続モードです。
モードによって端末を識別するための論理デバイスID(LID)の初期値は異なります。
親機または中継機モードに限り、インタラクティブモードで切り替えできます。
親機は121、中継機は122としてください。
未使用のAIxポートの扱い
子機:連続/子機:連続0.03秒/親機:連続 モードでは、未使用の AIx ポートを VCC へ接続してください。
未使用の AIx ポートは不定の値を報告します。これらのモードは入力信号に変化が生じた際にデータ送信を行いますから、不要なデータ送信を引き起こす場合があります。
親機
連続モード
親機:連続モード
信号入力の変化を検知したとき、また1秒おきに、すべての子機へデータを送信します。
また子機から送信されるデータを常時待機しており、反応がよいものの、常に電力を消費します。
- 受信:常に待機
- 送信:入力変化時/1秒おき
定期送信の無効化
インタラクティブモードでオプションビット
0x00000002 を設定することで、1秒おきの定期送信を無効化できます。子機
連続モード
子機:連続モード
信号入力の変化を検知したとき、また1秒おきに、すべての親機へデータを送信します。
また親機から送信されるデータを常時待機しており、反応がよいものの、常に電力を消費します。
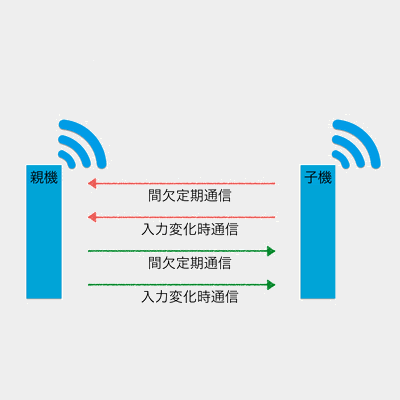
親機との通信のイメージ
- 受信:常に待機
- 送信:入力変化時/1秒おき
定期送信の無効化
インタラクティブモードでオプションビット
0x00000002 を設定することで、1秒おきの定期送信を無効化できます。子機:連続0.03秒モード
子機:連続モードの定期送信の間隔は1秒ですが、これを0.03秒に短縮するモードです。
親機から送信されるデータを常時待機しているものの、子機から親機への通信で帯域を占有してしまうため、親機の入力に対する反応は鈍くなってしまいます。常に電力を消費します。
親機との通信のイメージ
- 受信:常に待機
- 送信:入力変化時/0.03秒おき
1台の子機だけでほとんどの帯域を占有してしまうため、同時に複数の子機を使用することはなるべく避けてください。
間欠モード
子機:間欠1秒モード
信号入力の変化を検知したとき、また1秒おきに節電モードを解除し、すべての親機へデータを送信します。
受信機能を無効とするため、親機の制御を受けることはできません。省電力性能に優れたモードです。
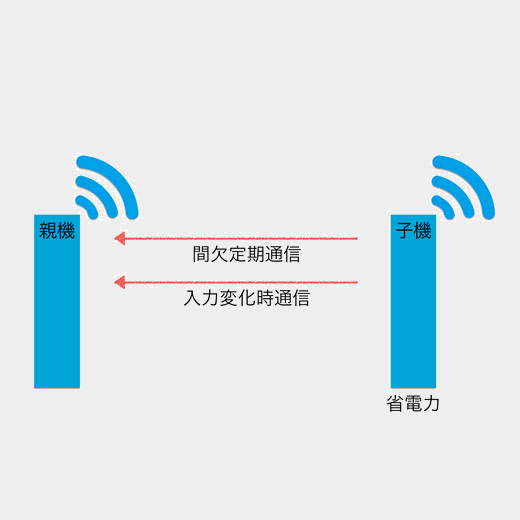
親機との通信のイメージ
- 受信:無効
- 送信:入力変化時/1秒おき
子機:間欠10秒モード
信号入力の変化を検知したとき、また10秒おきに節電モードを解除し、すべての親機へデータを送信します。
受信機能を無効とするため、親機の制御を受けることはできません。省電力性能に優れたモードです。
親機との通信のイメージ
- 受信:無効
- 送信:入力変化時/10秒おき
子機:間欠受信1秒モード
信号入力の変化を検知したとき、また1秒おきに節電モードを解除し、すべての親機へデータを送信します。
1秒おきに受信処理も合わせて行います。省電力性能に優れていますが、子機:間欠1秒モードには劣ります。
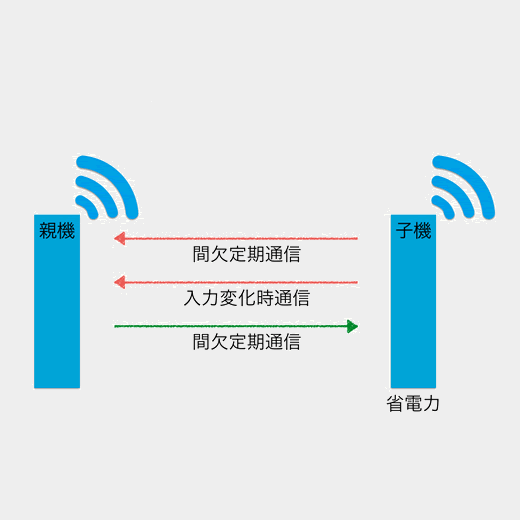
親機との通信のイメージ
- 受信:1秒おき
- 送信:入力変化時/1秒おき
間欠して受信するため、親機側を連続して動作させる必要があります。
中継機
連続モード
中継機:連続モード
中継機は、受信したパケットを送信します。
親機と子機の間に3つまで設置できますが、中継機を増やすとパケットの数が増大するため、干渉しやすくなることに注意してください。
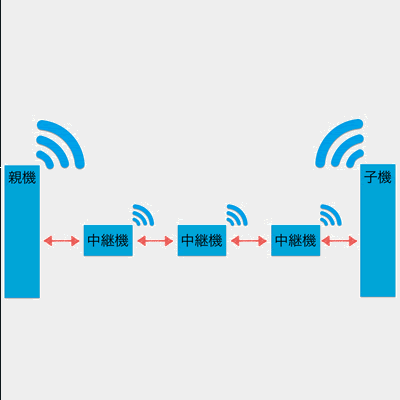
中継のイメージ
- 受信:常に待機
- 送信:受信時
子機に中継機能を付与することもできます。インタラクティブモードのオプションビットに
0x00008000を指定してください。1.3 - 超簡単!標準アプリの代替ボーレート設定
UART 通信に使用するボーレート設定の変更
超簡単!標準アプリ(App_Twelite)はデフォルトで 115200 bps のボーレートを UART 通信に使用しますが、これを変更できます。
代替ボーレート設定の有効化
BPS ピンを GND へ接続することで、代替ボーレート設定を有効化できます。
BPS | 内容 | ボーレート | 備考 |
|---|---|---|---|
| O | デフォルト | 115200bps | |
| G | 上書き設定 | 38400bps | 変更可 |
O:未接続(OPEN)、G:
GNDへ接続
インタラクティブモードのボーレート設定は、代替ボーレートの値を示しています。
BPS ピンが GND に接続されていないと、インタラクティブモードの設定値は適用されません。インタラクティブモードは、UART 通信を利用します。TWELTIE のボーレートを切り替えた際は、インタラクティブモードを使用する前に PC 側のボーレートを合わせなくてはなりません(TWELITE STAGE アプリの設定変更)。
1.4 - 超簡単!標準アプリのUART機能
UART機能で利用するデータ形式
超簡単!標準アプリ(App_Twelite)の UART 機能で使用するデータ形式を解説します。
デジタル・アナログ入出力
0x81:相手端末からの状態通知
受信した入力信号の状態を出力します。
データ形式
| # | データ | 内容 | 備考 |
|---|---|---|---|
char | ヘッダ | :のみ | |
| 0 | uint8 | 送信元の論理デバイスID | |
| 1 | uint8 | コマンド番号 | 0x81のみ |
| 2 | uint8 | パケット識別子 | アプリケーションIDより生成 |
| 3 | uint8 | プロトコルバージョン | 0x01のみ |
| 4 | uint8 | LQI | 0-255 |
| 5 | uint32 | 送信元のシリアルID | 0x8??????? |
| 9 | uint8 | 送信先の論理デバイスID | |
| 10 | uint16 | タイムスタンプ | 1秒で64カウント |
| 12 | uint8 | 中継回数 | |
| 13 | uint16 | 電源電圧 | 単位はmV |
| 15 | int8 | - | (未使用) |
| 16 | uint8 | デジタル信号 | LSBから順にDIxへ対応、0がHighMSBが 1なら定期送信 |
| 17 | uint8 | デジタル信号マスク | LSBから順にDIxへ対応、1が有効 |
| 18 | uint8 | AI1の変換値 | アナログ信号の計算を参照、0xFFで未使用 |
| 19 | uint8 | AI2の変換値 | アナログ信号の計算を参照、0xFFで未使用 |
| 20 | uint8 | AI3の変換値 | アナログ信号の計算を参照、0xFFで未使用 |
| 21 | uint8 | AI4の変換値 | アナログ信号の計算を参照、0xFFで未使用 |
| 22 | uint8 | AIxの補正値 | LSBから2ビットずつ順にAIxへ対応 |
uint8 | チェックサム | LRC8 | |
char | フッタ | CR (0x0D/'\r') | |
char | フッタ | LF (0x0A/'\n') |
親機・中継機アプリの出力と同一です。
アナログ信号の計算
AIxの入力電圧 \(V\)は、受信した変換値\(e_{r}\)および補正値\(e_{fr}\)を使って次のように表すことができます。
$$\begin{align*}
V &= e+e_f \\
\text{where} \\
e &= 16e_r \\
e_f &= 4e_{fr} \\
\end{align*}$$
単位は mV
出力データの例
:78811501C98201015A000391000C2E00810301FFFFFFFFFB
上記データの解釈
| # | データ | 内容 | 値 | |
|---|---|---|---|---|
: | char | ヘッダ | : | |
78 | 0 | uint8 | 送信元の論理デバイスID | 0x78 |
81 | 1 | uint8 | コマンド番号 | 0x81 |
15 | 2 | uint8 | パケット識別子 | 0x15 |
01 | 3 | uint8 | プロトコルバージョン | 0x01 |
C9 | 4 | uint8 | LQI | 201/255 |
8201015A | 5 | uint32 | 送信元のシリアルID | 0x201015A |
00 | 9 | uint8 | 送信先の論理デバイスID | 0x00 |
0391 | 10 | uint16 | タイムスタンプ | 約14.27秒 |
00 | 12 | uint8 | 中継回数 | 0 |
0C2E | 13 | uint16 | 電源電圧 | 3118mV |
00 | 15 | int8 | - | |
81 | 16 | uint8 | デジタル信号 | DI1 L DI2 HDI3 H DI4 H(定期送信) |
03 | 17 | uint8 | デジタル信号マスク | DI1 DI2 |
01 | 18 | uint8 | AI1の変換値 | 16mV |
FF | 19 | uint8 | AI2の変換値 | 未使用 |
FF | 20 | uint8 | AI3の変換値 | 未使用 |
FF | 21 | uint8 | AI4の変換値 | 未使用 |
FF | 22 | uint8 | AIxの補正値 | AI1 0x03 |
FB | uint8 | チェックサム | 0xFB | |
char | フッタ | \r | ||
char | フッタ | \n |
0x80:相手端末の出力変更
相手端末の出力信号を制御します。
データ形式
| # | データ | 内容 | 備考 |
|---|---|---|---|
char | ヘッダ | :のみ | |
| 0 | uint8 | 送信先の論理デバイスID | 親機0x00,子機0x01-0x64,全子機0x78 |
| 1 | uint8 | コマンド番号 | 0x80のみ |
| 2 | uint8 | 書式バージョン | 0x01のみ |
| 3 | uint8 | デジタル信号 | LSBからDOxに対応、0でHigh |
| 4 | uint8 | デジタル信号マスク | LSBからDOxに対応、1で有効 |
| 5 | uint16 | PWM1信号 | 0-1024,0xFFFFで無効 |
| 7 | uint16 | PWM2信号 | 0-1024,0xFFFFで無効 |
| 9 | uint16 | PWM3信号 | 0-1024,0xFFFFで無効 |
| 11 | uint16 | PWM4信号 | 0-1024,0xFFFFで無効 |
uint8 | チェックサム | LRC8 | |
char | フッタ | CR (0x0D/'\r') | |
char | フッタ | LF (0x0A/'\n') |
UART 入出力
0x01:任意のデータの送信
データ形式
| # | データ | 内容 | 備考 |
|---|---|---|---|
char | ヘッダ | :のみ | |
| 0 | uint8 | 送信先の論理デバイスID | 親機0x00,子機0x01-0x64,全子機0x78 |
| 1 | uint8 | コマンド番号 | 0x01のみ |
| 2 | [uint8] | 任意のデータ | 長さ\(N\)のバイト列(\(N\leqq80\)を推奨) |
uint8 | チェックサム | LRC8 | |
char | フッタ | CR (0x0D/'\r') | |
char | フッタ | LF (0x0A/'\n') |
シリアル通信アプリの書式モード(アスキー)の簡易形式のコマンド番号に
0x01を指定する場合と同様です。0x01:任意のデータの受信
データ形式
| # | データ | 内容 | 備考 |
|---|---|---|---|
char | ヘッダ | :のみ | |
| 0 | uint8 | 送信元の論理デバイスID | 親機0x00,子機0x01-0x64,未設定子機0x78 |
| 1 | uint8 | コマンド番号 | 0x01のみ |
| 2 | [uint8] | 任意のデータ | 長さ\(N\)のバイト列 |
uint8 | チェックサム | LRC8 | |
char | フッタ | CR (0x0D/'\r') | |
char | フッタ | LF (0x0A/'\n') |
シリアル通信アプリの書式モード(アスキー)の簡易形式のコマンド番号が
0x01であった場合と同様です。I2C 入出力
0x88:I2C 入力
データ形式
| # | データ | 内容 | 備考 |
|---|---|---|---|
char | ヘッダ | :のみ | |
| 0 | uint8 | 送信先の論理デバイスID | 親機0x00,子機0-0x7F,全子機0x78,自身0xDB |
| 1 | uint8 | パケット識別子 | 0x88のみ |
| 2 | uint8 | 応答番号 | 応答メッセージへ出力する番号 |
| 3 | uint8 | コマンド番号 | 書き込み0x1,読み出し0x2,読み書き0x4 |
| 4 | uint8 | I2Cアドレス | 7ビット |
| 5 | uint8 | I2Cコマンド | 最初のコマンドバイト |
| 6 | uint8 | データサイズ | 0はなし |
| 7 | [uint8] | データ | 長さ\(N\)のバイト列 |
uint8 | チェックサム | LRC8 | |
char | フッタ | CR (0x0D/'\r') | |
char | フッタ | LF (0x0A/'\n') |
コマンド番号
0x4では、データサイズに読み出すデータのサイズを指定したうえで、データを省略してください。指定されたI2Cコマンドを書き込み、データサイズの分だけ読み出しを行います。0x89:I2C 出力
データ形式
| # | データ | 内容 | 備考 |
|---|---|---|---|
char | ヘッダ | :のみ | |
| 0 | uint8 | 送信元の論理デバイスID | 親機0x00,子機0-0x7F,全子機0x78,自身0xDB |
| 1 | uint8 | パケット識別子 | 0x89のみ |
| 2 | uint8 | 応答番号 | 応答メッセージへ出力する番号 |
| 3 | uint8 | コマンド番号 | 書き込み0x1,読み出し0x2,読み書き0x4 |
| 4 | uint8 | 結果 | 失敗0、成功1 |
| 5 | uint8 | データサイズ | 0はなし |
| 6 | [uint8] | データ | 長さ\(N\)のバイト列 |
uint8 | チェックサム | LRC8 | |
char | フッタ | CR (0x0D/'\r') | |
char | フッタ | LF (0x0A/'\n') |
1.5 - インタラクティブモード(超簡単!標準アプリ)
インタラクティブモードによる詳細な設定変更
インタラクティブモードでアプリの詳細設定を行うことができます。
ここでは超簡単!標準アプリ(App_Twelite)に固有の機能を説明します。共通機能については、TWELITE APPS マニュアル のトップページを参照してください。
TWELITE がスリープしている間はインタラクティブモードを使用できません。
Mxピンの設定を子機連続モードあるいは親機・中継機モードとしてください。
表示例
次のような画面を表示します。
--- CONFIG/TWELITE APP V1-08-2/SID=0x8201001f/LID=0x78 ---
a: set Application ID (0x67720102)
i: set Device ID (--)
c: set Channels (18)
x: set Tx Power (03)
t: set mode4 sleep dur (1000ms)
y: set mode7 sleep dur (10s)
f: set mode3 fps (32)
z: set PWM HZ (1000,1000,1000,1000)
o: set Option Bits (0x00000000)
b: set UART baud (38400)
p: set UART parity (N)
---
S: save Configuration
R: reset to Defaults
コマンド
| 設定項目 | 初期値 | 備考 | |
|---|---|---|---|
a | アプリケーションID | 0x67720102 | 32bit |
i | 論理デバイスID | 自動 | 子機1-100,親機121,中継機122 |
c | 周波数チャネル | 18 | 11-26 |
x | 再送回数と送信出力 | 03 | |
| 再送回数 | 0 | 1-9回、0は初期値の2回、Fは無効 | |
| 送信出力 | 3 | 0-3 | |
t | 子機間欠1秒モードの間隔 | 1000 | 100-10000ms |
y | 子機間欠10秒モードの間隔 | 10 | 2-10000s |
f | 子機連続0.03秒モードのサイクル | 32 | 4/8/16/32回毎秒 |
z | PWMxの周波数 | 1000 | 1-64000Hz、カンマ区切りで個別設定 |
o | オプションビット | 0x00000000 | その他の詳細設定 |
b | UART代替ボーレート | 38400 | BPSピンで有効化 |
p | UARTパリティ | N | 8-(N/O/E)-1 |
各コマンドの詳細を次に示します。
a:アプリケーションID
通信を行う端末はすべて同一の値とします。論理的にネットワークを分離します。
アプリケーションIDの仕様については、TWELITE APPS 共通設定の説明をご覧ください。
i:論理デバイスID
複数の子機を識別する必要がある場合に設定します。
子機の場合は1-100の任意の値へ、親機の場合は121へ、中継機の場合は122へ設定してください。
121または122へ設定すると、親機または中継機モードへ切り替えできます。このときMxピンの設定は必要ありません。超簡単!標準アプリでは、動作モードによって論理デバイスIDの初期値が異なります。
論理デバイスIDの仕様については、TWELITE APPS 共通設定の説明をご覧ください。
c:周波数チャネル
通信を行う端末はすべて同一の値とします。物理的にネットワークを分離します。
周波数チャネルの仕様については、TWELITE APPS 共通設定の説明をご覧ください。
x:送信出力と再送回数
電波の送信出力と、パケットを追加で送信する回数を指定します。
送信出力と再送回数の仕様については、TWELITE APPS 共通設定の説明をご覧ください。
t:子機間欠1秒モードの間隔
子機間欠1秒モードの間欠時間を1秒から他の値へ上書きします。単位はミリ秒です。
0を設定した場合は、タイマによる定期的な起床を無効化します。このときDIxの立ち下がりエッジにより起床しますが、立ち上がりエッジでは起床しません。
y:子機間欠10秒モードの間隔
子機間欠10秒モードの間欠時間を10秒から他の値へ上書きします。単位は秒です。
0を設定した場合は、タイマによる定期的な起床を無効化します。このときDIxの立ち下がりエッジにより起床しますが、立ち上がりエッジでは起床しません。
f:子機連続0.03秒モードのサイクル
毎秒の送信リクエストの数を32回から4/8/16回へ上書きします。再送回数は含みません。
z:PWMxの周波数
値を一つ指定した場合は、すべてのPWMポートの周波数を上書きします。カンマ区切りで指定した場合は、PWM1-PWM4に個別の値を上書きできます。
o:オプションビット
32bit の数値を指定します。各ビットに紐付いた設定を有効化できます。
| 対象ビット | 設定項目 | 初期 | 送信 | 受信 | 連続 | 間欠 |
|---|---|---|---|---|---|---|
0x00000001 | 低レイテンシモード | 0️⃣ | ✅ | ✅ | ✅ | |
0x00000002 | 定期送信の無効化 | 0️⃣ | ✅ | ✅ | ||
0x00000004 | 定期送信とUART出力の無効化 | 0️⃣ | ✅ | ✅ | ||
0x00000010 | AIxの変化による送信の無効化 | 0️⃣ | ✅ | ✅ | ||
0x00000020 | AIxの値の無効化 | 0️⃣ | ✅ | ✅ | ✅ | |
0x00000040 | PWMxの計算式を変更 | 0️⃣ | ✅ | ✅ | ✅ | |
0x00000100 | ボタン押下時のみ送信 | 0️⃣ | ✅ | ✅ | ✅ | |
0x00000800 | DIxの内部プルアップを停止 | 0️⃣ | ✅ | ✅ | ✅ | |
0x00008000 | 子機へ中継機能を付与 | 0️⃣ | ✅ | ✅ | ✅ | |
0x00001000 | 子機中継時の最大中継段数を2とする | 0️⃣ | ✅ | ✅ | ✅ | |
0x00002000 | 子機中継時の最大中継段数を3とする | 0️⃣ | ✅ | ✅ | ✅ | |
0x00010000 | PWMxの波形を反転 | 0️⃣ | ✅ | ✅ | ||
0x00020000 | 起動後PWMxを落とす | 0️⃣ | ✅ | ✅ | ||
0x00080000 | 代替ポート割り当て | 0️⃣ | ✅ | ✅ | ✅ | ✅ |
0x00100000 | 起動後2秒間DOxを落とす | 0️⃣ | ✅ | ✅ | ||
0x00400000 | DOxの出力を反転 | 0️⃣ | ✅ | ✅ | ✅ | |
0x00800000 | DOxの内部プルアップを停止 | 0️⃣ | ✅ | ✅ | ✅ |
b:UART代替ボーレート
BPSピンをGNDへ接続して起動した場合に選択される代替ボーレートを38400bpsから上書きします。
値は9600/19200/38400/57600/115200/230400から選択できます。他の値を指定すると、誤差が生じる可能性があります。
BPSピンを開放して起動した場合、この設定は適用されません。115200bpsに固定されます。
ボーレート変更によってインタラクティブモードが使用できない事態を防ぐための仕様です。
p:UARTパリティ
Nはパリティ無し、Oは奇数、E:は偶数を示します。
データビットは8、ストップビットは1で固定されます。ハードウェアフローは設定できません。
オプションビットの詳細
オプションビットの値の各ビットに紐付いた設定を解説します。
00000001:低レイテンシモード
低レイテンシモードは、DIxの変化を検知してから速やかに送信を行うことで、受信側の遅延を短縮します。
低レイテンシモードの動作
初期状態ではDIxがDOxへ反映されるまでに30-70ms程度の遅延が生じます。低レイテンシモードでは、チャタリングや無線パケットの干渉を避けるための処理を簡略化することで、遅延を3-10ms程度に短縮します。
- 立ち下がりエッジの検出には割り込みを利用します
- 検出後、約100msの間は新たな検出を行いません
- 立ち上がりエッジの検出には定期的な判定を利用します
- 1msおきに5回連続でHighである場合に送信します
- (初期状態では4msおきに5回連続でHighである場合に送信します)
- 検出時は送信および再送の遅延を設定しません。直ちに無線パケットを送信します
- 代表的な遅延は、
DIxの立ち下がりの場合に約3-5ms、立ち上がりの場合に約10msです - 実際の遅延は送受信の失敗などを理由に変化します
- 間欠モードにおいても、本体の起床から送信までの時間を短縮します
00000002:定期送信の無効化
連続モードにおける1秒おきの定期送信を無効化します。
00000004:定期送信とUART出力の無効化
子機:連続モードにおける1秒おきの定期送信を無効化するほか、受信データのUART出力を停止します。
00000010:AIxの変化による送信の無効化
子機:連続モードにおいて、AIxの入力が変化した際の送信を無効化します。
開放されたAIxポートは不定の値を報告するため、正気状態でアナログ入力を利用しない場合はVCCへ接続する必要があります。このオプションを設定すると、VCCへの接続を省略できます。
00000020:AIxの値の無効化
ADCの計測値を使用せず、未使用ポート(0xFFFF)扱いとしてパケットを送信します
00000040:PWMxの計算式を変更
初期状態ではボリューム用に調節した出力を PWMx へ適用します。
このオプションはこれを無効化し、1.8V 以下の入力に対してフルスケールの出力を行います。
デューティ比の計算式
デューティ比 \(duty\)は、入力電圧\(V_{input}\)と電源電圧\(V_{cc}\)を使って、(1) のように表すことができます。
$$\begin{align}
duty &= min(230\frac{V_{input}}{V_{cc}}-5, 100) \\
duty &= 100\frac{min(V_{input}, 1.8)}{1.8}
\end{align}$$
このオプションを有効化すると、代わりに (2) を適用します。
なお、2.0V 以上の入力は未使用扱いとなります。
00000100:ボタン押下時のみ送信
DIxの入力が Low であるときにパケットを連続送信します。
例えば、モータを遠隔制御する際に利用します。リモコンのボタンを押している間にモータを回転させ、電波が途切れた場合に停止させることができます。
連続送信の動作
DIxのいずれかが Low のときは、1秒につき32回送信しますDIxのすべてが High へ遷移してから1秒間は引き続き32回送信しますDOxのいずれかが Low へ遷移してから0.5秒間パケットを受信しなかった場合は、DOxをすべて High へ戻します。PWMxは保持します
00000800:DIxの内部プルアップを停止
DIxの内部プルアップ(約50kΩ)をすべて停止します。
起動してからハードウェアの初期化を完了するまでの約1msの期間はプルアップされます。
00008000:子機へ中継機能を付与
子機:連続モードにおいて中継機能を付与します。最大中継段数は1です。
00001000:子機中継時の最大中継段数を2とする
00008000:子機へ中継機能を付与の設定時に、最大中継段数を2へ変更します。
00002000:子機中継時の最大中継段数を3とする
00008000:子機へ中継機能を付与の設定時に、最大中継段数を3へ変更します。
00010000:PWMxの波形を反転
PWMxの出力波形を反転します。
AIxへ最大値を入力すると PWMxは Low となります。
00020000:起動後PWMxを落とす
起動後またはリセット後にPWMxの出力を Low 状態とします。
起動してからハードウェアの初期化を完了するまでの約1msの期間は High 状態となります。
00080000:代替ポート割り当て
代替ポート割り当てを有効化します。
PWM2/PWM3へトランジスタ等を接続すると、動作が不安定となる場合があります(詳細)そうした場合に利用してください。
代替ポート割り当ての内容
PWMxの割り当て変更DI3→PWM1DI1→PWM2DI2→PWM3BPS→PWM4
DIxの割り当て変更PWM1→DI1PWM4→DI2SDA→DI3DI4→DI4(変更なし)
BPSの割り当て変更SCL→BPS
SCL/SDAを無効化SCL:なしSDA:なし
00100000:起動後2秒間DOxを落とす
起動後またはリセット後にDOxを2秒間 Low 状態とします。
DOx へ接続した LED を起動時に点灯させることができます。
起動してからハードウェアの初期化を完了するまでの約1msの期間は High 状態となります。
00400000:DOxの出力を反転
DOxの出力を反転します。
初期状態とは異なり、片方の DI が Low レベルになると、もう片方の DO は High レベルとなります。
DOの初期状態は Low ですが、起動してからハードウェアの初期化を完了するまでの約1msの期間は High 状態となります。
00800000:DOxの内部プルアップを停止
DOxの内部プルアップ(約50kΩ)をすべて停止します。