まずは使ってみる
DIx/AIx ポートへ入力した信号をもう片方の DOx/PWMx ポートへ反映させてみましょう。使用する製品
 |
|---|
| TWELITE DIP |
| TWELITE 親機/子機/中継機 |
| 超簡単!標準アプリ |
| 2個(中継機使用時は3個) |
片方向の信号伝送
親機へ入力された信号を、子機から出力できます。
親機はすべての子機へデータを送信します
DIx で全ての子機の DOx を同時に制御できます。デジタル信号
親機へ接続したスイッチを押すと子機へ接続した LED が点灯し、親機へ接続したスイッチを離すと子機へ接続した LED が消灯します。
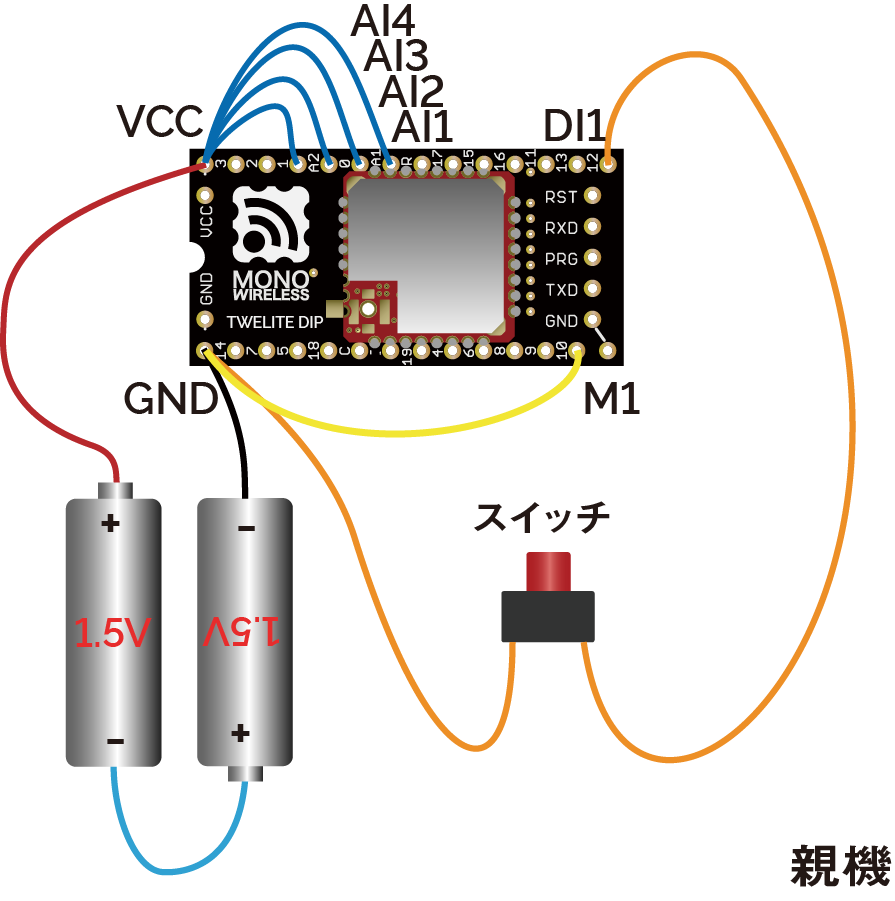
親機の配線
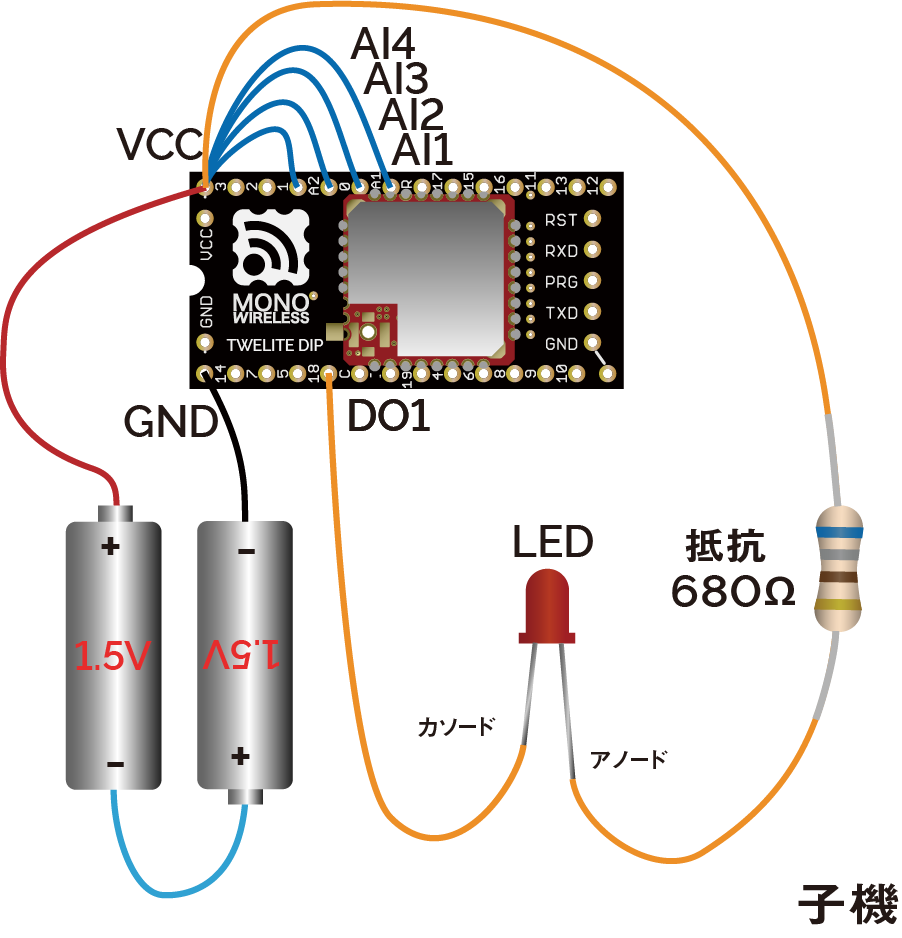
子機の配線
上記の例では DI1 と DO1 だけを使っていますが、ポートは合計4つあります。他のポートも同様に使用できます。
片側の TWELITE DIP は、M1 ピンを GND へ接続してください。親機となります。
また、未使用の AIx ポートは VCC へ接続してください。無効化されます(インタラクティブモードによる設定変更で省略可)。
出力できる電流の大きさには制限があります
| 電源電圧 | 駆動能力 |
|---|---|
| 2.7V-3.6V | 4mA |
| 2.2V-2.7V | 3mA |
| 2.0V-2.2V | 2.5mA |
駆動能力を超える場合は、MOSFET やトランジスタを使用してください。
アナログ信号
親機へ接続したボリュームを回すと、子機へ接続した LED の明るさが変化します。
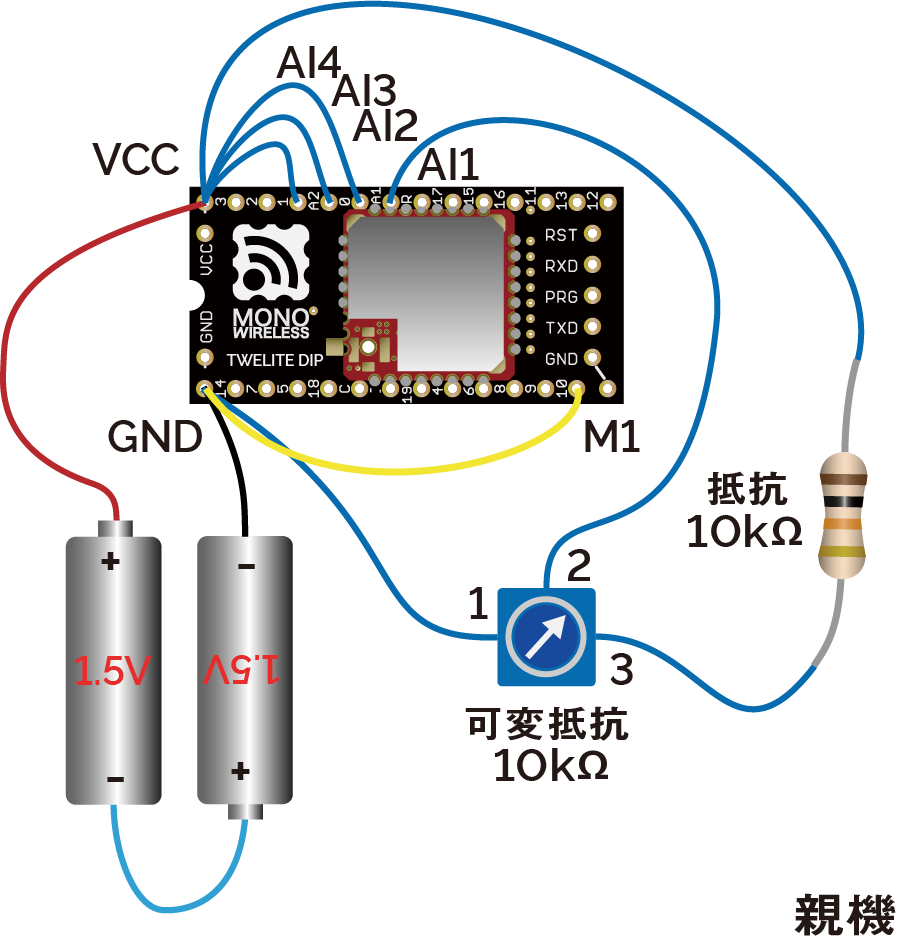
親機の配線
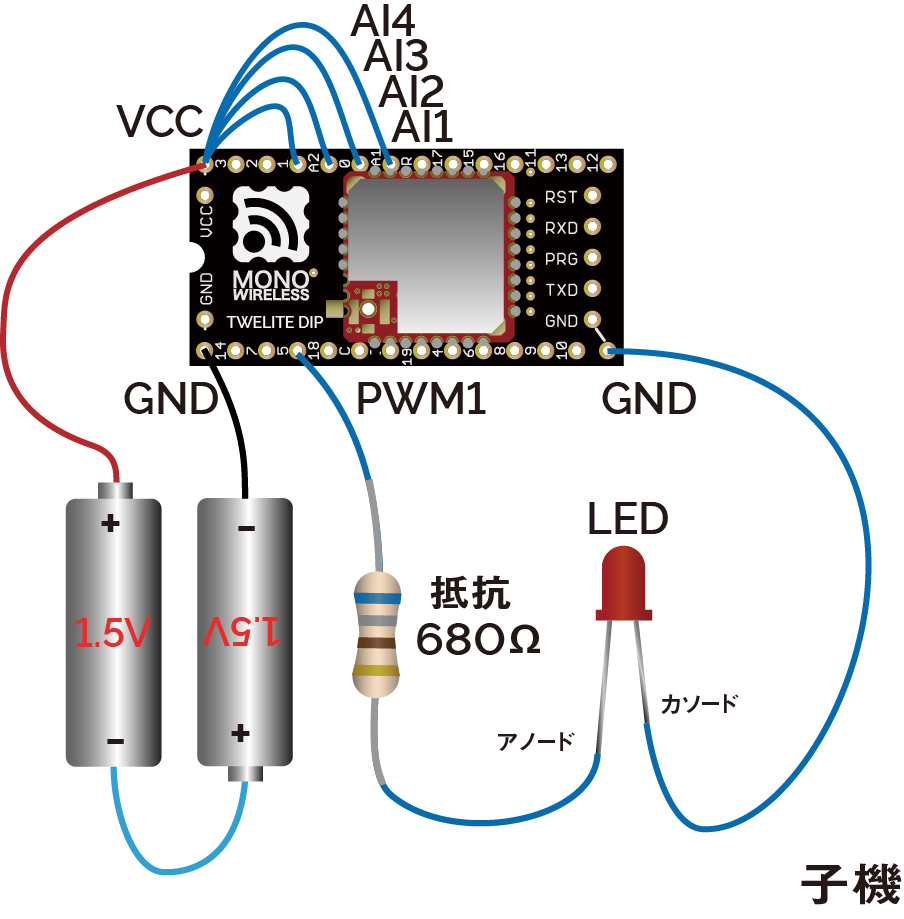
子機の配線
上記の例では AI1 と PWM1 だけを使っていますが、ポートは合計4つあります。他のポートも同様に使用できます。
入出力の電圧について
アナログ入力は2.0V以下で動作します。
上記の例では、電源電圧をボリューム(10KΩ)と抵抗(10KΩ)で半分に分圧しています。初期状態の超簡単!標準アプリでは、ボリューム用に調節した出力を PWMx へ適用します。このときのデューティ比を\(duty\)とするとき、入力電圧\(V_{input}\)と電源電圧\(V_{cc}\)を使って表す計算式を次に示します。
\(duty=min(230\frac{V_{input}}{V_{cc}}-5, 100)\)
なお、インタラクティブモードを使ってオプションビット 0x00000040 を設定すると、1.8V 以下の入力に対してフルスケールで出力できます(2.0V以上で未使用扱い)。
\(duty=100\frac{min(V_{input}, 1.8)}{1.8}\)
PWM2 および PWM3 へ何らかの配線をしていると、ファームウェアを書き換えできない場合があります。
これらのピンは、ファームウェア書き換え時に使用するための機能を備えているからです(詳細)。
双方向の信号伝送
信号伝送は、親機から子機だけではなく、子機から親機へも同様に行えます。
親機はすべての子機からデータを受信します
複数の子機を用意すると、排他的な子機の DIx で親機の DOx を平行して制御できます。
(例:ある子機の DI1 を親機の DO1 へ、別の子機の DI2 を親機の DO2 へ反映させる)
デジタル信号の伝送例を双方向に拡張してみましょう。なおアナログ信号の伝送例も同様に拡張できます。
親機へ接続したスイッチを押すと子機へ接続した LED が点灯し、親機へ接続したスイッチを離すと子機へ接続した LED が消灯します。 同時に子機へ接続したスイッチを押すと親機へ接続した LED が点灯し、子機へ接続したスイッチを離すと親機へ接続した LED が消灯します。
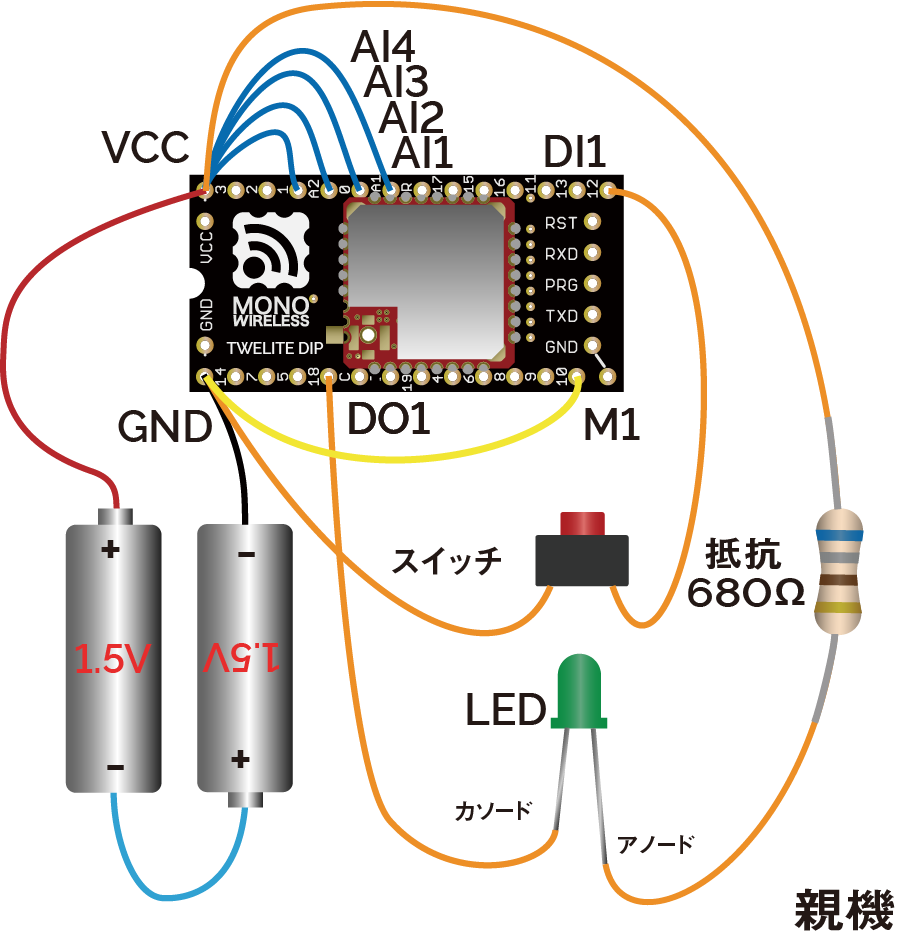
親機の配線
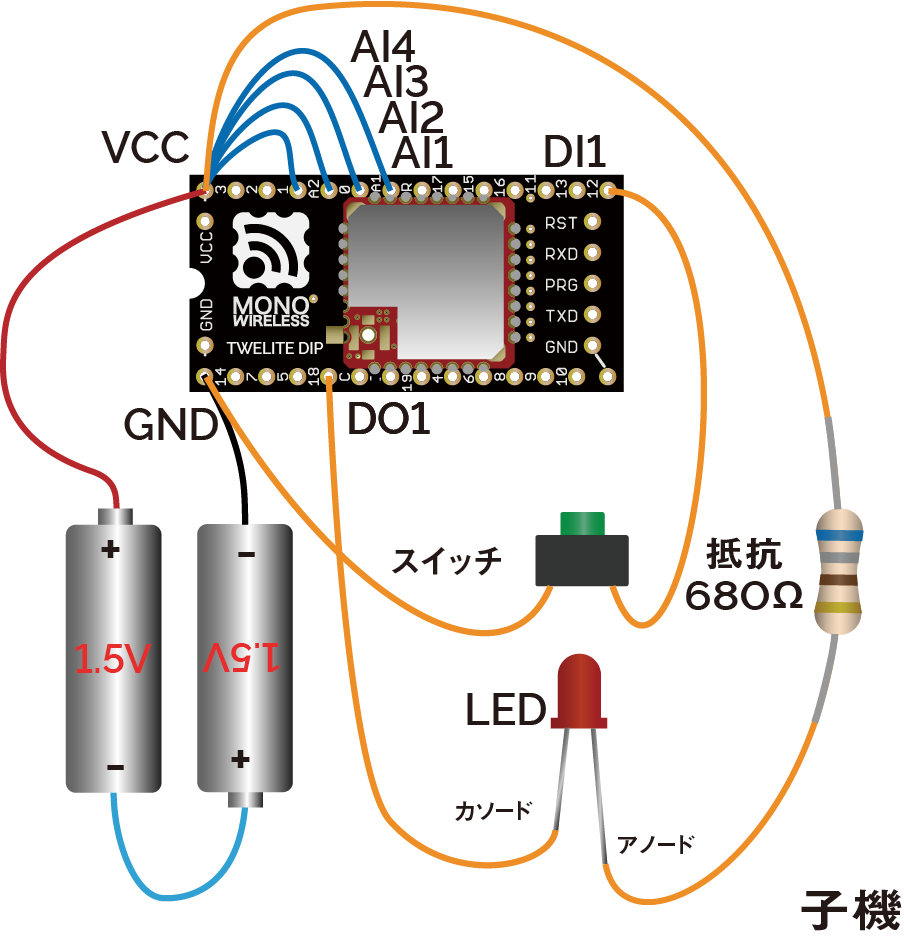
子機の配線
上記の例では DI1 と DO1 だけを使っていますが、ポートは合計4つあります。他のポートも同様に使用できます。
中継機の設置
中継機として設定したものを親機と子機の間へ設置することで、通信距離を延長できます。最大3段まで中継できます。
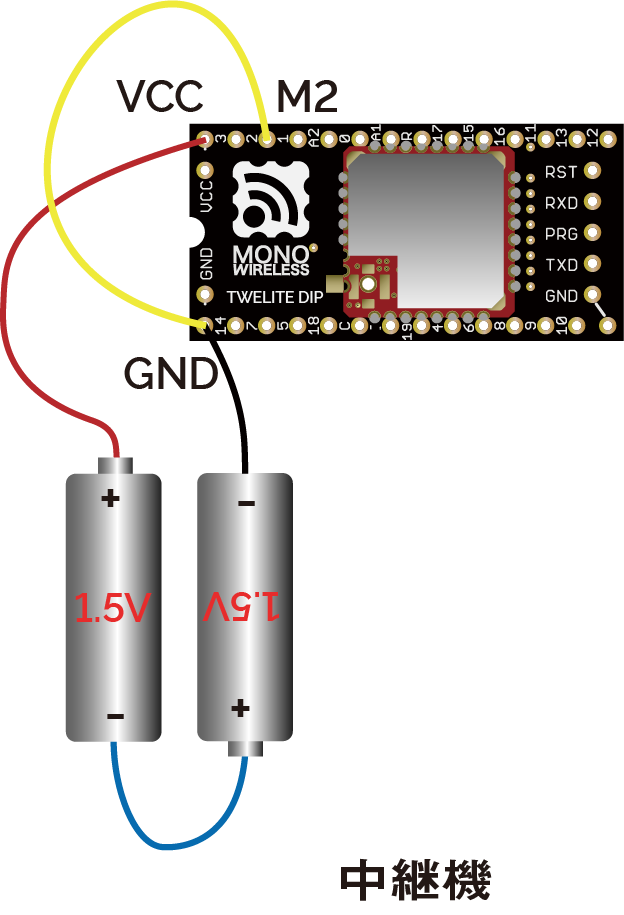
中継機の配線
M2 を GND へ接続します。